-
8/3/2019 Anlisis dinmico de un Controlador
1/32
ANLISIS DINMICO DEUN CONTROLADOR
-
8/3/2019 Anlisis dinmico de un Controlador
2/32
OBJETIVOS:
Dados los conocimientos tecnolgicos, al finalizar lasesin, el participante estar en condiciones decomprender y explicar correctamente, el funcionamientode los controladores digitales en condiciones en rgimen
dinmico.
-
8/3/2019 Anlisis dinmico de un Controlador
3/32
1. GENERALIDADES:
Habiendo estudiado la respuesta del Controlador y elProceso en condiciones de rgimen estable, se hacenecesario conocer ahora el comportamiento de esta
respuesta en condiciones dinmicas de operacin.Este conocimiento nos servir para comprender,mejorar, y optimizar los parmetros de sintona y larespuesta del Proceso.
-
8/3/2019 Anlisis dinmico de un Controlador
4/32
En esta Unidad Instruccional se mostrarn las
caractersticas de los controles proporcional (P),integral (I) y derivativo (D). y como usarlos paraconseguir la respuesta deseada.
Consideremos, el siguiente sistema con
realimentacin negativa:
-
8/3/2019 Anlisis dinmico de un Controlador
5/32
2. Ecuaciones de salida del ControladorProporcional, Proporcional Integral,
Proporcional Derivativo, ProporcionalIntegral Derivativo.Conocemos que las ecuaciones del controlador en eldominio del tiempo son:
Control Proporcional y= Kce + yoControl ProporcionalIntegral y= Kce + KcKiedt + yoControl ProporcionalDerivativo y= Kce + KcKdde/dt + yoControl Proporcional
Integral Derivativo y= Kce + KcKiedt + KcKdde/dt + yo
-
8/3/2019 Anlisis dinmico de un Controlador
6/32
Adems sabemos que en el dominio de la frecuencia son:
Control Proporcional Y(s)= KcE(s)Control ProporcionalIntegral Y(s)= KcE(s)+ KcKiE(s)/sControl Proporcional
DerivativoY
(s)
= Kc
E(s)
+ Kc
Kd
E(s)
sControl ProporcionalIntegral Derivativo Y(s)= KcE(s)+ KcKiE(s)/s + KcKdE(s)s
-
8/3/2019 Anlisis dinmico de un Controlador
7/32
3. FUNCIN DE TRANSFERENCIA:
La Funcin de Transferencia de un Sistema Linealinvariante con el tiempo, est definida como la relacinde la Transformada de Laplace de la salida y laTransformada de Laplace de la entrada, cuando las
condiciones iniciales son nulas, as por ejemplo lasiguiente expresin muestra la funcin de transferenciade un controlador PID:
donde:
Kp = Ganancia proporcional
KI = Ganancia integralKD = Ganancia derivativa
-
8/3/2019 Anlisis dinmico de un Controlador
8/32
En primer lugar, veamos cmo funciona un controladorPID en un sistema en bucle cerrado como elrepresentado en el esquema anterior.
La variable (e) representa el error de seguimiento, ladiferencia entre el valor de la entrada deseada (R) y lasalida efectiva (C). Esta seal de error (e) se enva alcontrolador PID y el controlador evala tanto la integralcomo la derivada de esta seal de error.
-
8/3/2019 Anlisis dinmico de un Controlador
9/32
La seal (y) a la salida del controlador es igual a lamagnitud del error por la ganancia proporcional (Kp),
ms la magnitud de la integral del error por la gananciaintegral (Ki), ms la magnitud de la derivada del error porla ganancia derivativa (Kd) ms el Bas.
Esta seal (y) se enva a la planta, con lo que seproduce una nueva salida (C). Esta nueva salida (C) seenva de nuevo al sensor para determinar la nueva sealde error (e). Por ltimo, el controlador utiliza esta nuevaseal de error para calcular nuevamente su derivada y
su integral. Este proceso se repite una y otra vez.
-
8/3/2019 Anlisis dinmico de un Controlador
10/32
Ejercicio de Clculo de Funcin deTransferencia:
1) Hallar la Funcin de Transferencia:
Solucin:
-
8/3/2019 Anlisis dinmico de un Controlador
11/32
Por 2 Ley de Kirchhoff:ei = VR + VC
tiCiRei 1
En el dominio de la frecuencia:
Ei(s) =I(s)R +sC
1I(s)
Ei(s) =I(s) { R + }sC
1
Anlogamente
eo = VC
tiC
eo1
-
8/3/2019 Anlisis dinmico de un Controlador
12/32
En el dominio de la frecuencia:
sCsIsEo1
)()(
Clculo de la funcin de transferencia
sCRsI
sCsI
sEi
sEoFT
1)(
1)(
)(
)(
11
11
sRCsFT
-
8/3/2019 Anlisis dinmico de un Controlador
13/32
4. CURVAS CARACTERSTICAS DE LOSCONTROLADORES P, PI, PD Y PIDUn controlador proporcional (Kp) reduce el tiempo desubida pero no elimina nunca el error en rgimenpermanente. El control integral (Ki) elimina el error en
rgimen permanente pero empeora la respuestatransitoria. Un control derivativo (Kd) incrementa laestabilidad del sistema, reduce el sobreimpulso ymejora la respuesta transitoria.
-
8/3/2019 Anlisis dinmico de un Controlador
14/32
En la siguiente tabla se resumen los efectos de cadacontrolador Kp, Kd y Ki sobre un sistema en buclecerrado.
ACCIN DECONTROL
TIEMPOSUBIDA SOBREIMPULSO
TIEMPO DE.ESTABLECIMIENTO
ERROR
LAZO CERRADO
Kp Disminuye Aumenta Poca variacin Disminuye
Ki Disminuye Aumenta Aumenta Elimina
Kd Pocavariacin
Disminuye Disminuye Pocavariacin
-
8/3/2019 Anlisis dinmico de un Controlador
15/32
Tenga en cuenta que estas relaciones puede que nosean demasiado precisas porque los efectos de lasganancias Kp, Ki y Kd dependen los unos de los otros.De hecho, al variar el valor de una de estas variablespuede que se modifiquen los efectos producidos por lasotras dos. Por esta razn, a la hora de determinar losvalores de Kp, Ki y Kd slo deber usar esta tablacomo una referencia.
-
8/3/2019 Anlisis dinmico de un Controlador
16/32
Problema ejemplo:
Consideremos el simple problema de unsistema masa, resorte y amortiguador.
-
8/3/2019 Anlisis dinmico de un Controlador
17/32
Se pide:
a) Determinar la ecuacin que modela el
sistema en el dominio de la frecuenciab) La funcin de Transferenciac) La funcin de Transferencia para
* M = 1 kg* b = 10 N.s/m* k = 20 N/m* F(s) = 1
d) Graficar las respuesta del sistema para:
* Una entrada en escaln en Lazo Abierto* Control Proporcional* Control Proporcional Derivativo* Control Proporcional Integral
* Control Proporcional Integral Derivativo
-
8/3/2019 Anlisis dinmico de un Controlador
18/32
Solucin:
Aplicando la Ley de Newton: F = maF kx - bv = maEntonces la ecuacin que modela este sistema es:
a) Tomando la transformada de Laplace de la ecuacin delmodelo (1):
-
8/3/2019 Anlisis dinmico de un Controlador
19/32
b) La funcin de transferencia del desplazamiento X(s)con respecto a la entrada F(s) ser:
c) Remplazando los datos en la anterior funcin de
transferencia
d) El objetivo de este problema es mostrar como Kp,Ki y Kd contribuyen a obtener* Un tiempo de subida ms rpido* Un sobreimpulso mnimo
* Un error en rgimen permanente nulo.
-
8/3/2019 Anlisis dinmico de un Controlador
20/32
Para ello utilizaremos el Programa Matlab para obtenergrficamente la respuesta del Sistema
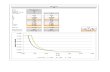
A) RESPUESTA ESCALN EN BUCLE ABIERTOVeamos, en primer lugar, la respuesta en bucleabierto del sistema ante una entrada escaln, seobtendr la siguiente grfica.
La ganancia de la funcin de transferencia de laplanta es 1/20, as, el valor final de la salidaante un escaln unitario es 0.05, lo quecorresponde a un error en rgimen permanentede 0.95, en efecto, bastante grande. Ms an, eltiempo de subida es de alrededor de un
segundo y el tiempo de establecimiento es deaproximadamente 1.5 segundos. Diseemos uncontrolador que reduzca el tiempo de subida y eltiempo de establecimiento y elimine el error enrgimen permanente.
-
8/3/2019 Anlisis dinmico de un Controlador
21/32
B) CONTROL PROPORCIONAL
En la tabla anterior se muestra que el controladorproporcional (Kp) reduce el tiempo de subida,incrementa el sobreimpulso y reduce el error enrgimen permanente. La funcin de transferencia
de bucle cerrado del sistema anterior con uncontrolador proporcional es:
-
8/3/2019 Anlisis dinmico de un Controlador
22/32
Establezcamos 300 como valor de la gananciaproporcional (Kp) y se deber obtener la siguientegrfica.
El grfico muestra como elcontrolador proporcional hareducido tanto el tiempo desubida como el error en
rgimen permanente, haincrementado elsobreimpulso y disminuido,en una pequea cantidad el
tiempo de establecimiento.
-
8/3/2019 Anlisis dinmico de un Controlador
23/32
C) CONTROL PROPORCIONAL Y DERIVATIVO
Veamos ahora el control PD. En la tabla mostradaanteriormente se muestra que el controladorderivativo (Kd) reduce tanto el sobreimpulso comoel tiempo de establecimiento. La funcin de
transferencia de bucle cerrado del sistemapropuesto con un controlador PD es:
-
8/3/2019 Anlisis dinmico de un Controlador
24/32
Establezcamos en 300 el valor de Kp y en 10 el deKd.
Esta grfica muestra comoel controlador derivativoreduce el sobreimpulso y eltiempo de establecimiento ytiene poco efecto sobre eltiempo de subida y el erroren rgimen permanente.
-
8/3/2019 Anlisis dinmico de un Controlador
25/32
D) CONTROL PROPORCIONAL E INTEGRAL
Antes de analizar el control PID, veamos elcontrol PI. En la tabla se muestra que un controlintegral (Ki) disminuye el tiempo de subida,incrementa tanto el sobreimpulso como el tiempode establecimiento y elimina el error en rgimenpermanente. Para el sistema propuesto, lafuncin de transferencia de bucle cerrado con uncontrol PI es:
-
8/3/2019 Anlisis dinmico de un Controlador
26/32
Reduzcamos a 30 el valor de Kp y establezcamos en 70el valor de Ki y se debera obtener el siguiente grfico.
Se ha reducido el valor de laganancia proporcional (Kp)porque el controlador integraltambin reduce el tiempo de
subida e incrementa elsobreimpulso tal y comohace el controladorproporcional (efecto doble).La respuesta anterior
muestra como el controladorintegral elimina el error enrgimen permanente.
-
8/3/2019 Anlisis dinmico de un Controlador
27/32
E) CONTROL PROPORCIONAL, INTEGRAL Y
DERIVATIVOVeamos ahora el controlador PID. La funcin detransferencia de bucle cerrado del sistema dado conun controlador PID es:
-
8/3/2019 Anlisis dinmico de un Controlador
28/32
Tras varias pruebas se ha comprobado que losvalores de las ganancias Kp=350, Ki=300 y Kd=50
proporcionan una respuesta adecuada.
Ahora se ha obtenido unsistema sin sobreimpulso,
con un tiempo de subidarpido y sin error en rgimenpermanente
-
8/3/2019 Anlisis dinmico de un Controlador
29/32
5. ESQUEMAS DE CONTROLADORESELECTRNICOS BSICOS CON
OPAMP.
-
8/3/2019 Anlisis dinmico de un Controlador
30/32
-
8/3/2019 Anlisis dinmico de un Controlador
31/32
6. PRECAUCIONES EN LA VERIFICACINDEL ANLISIS DINMICO DE LOS
CONTROLADORES.Cuando est diseando un controlador PID para unsistema dado siga los siguientes pasos para obtener elresultado deseado.
1. Obtenga la respuesta en bucle abierto ydetermine los parmetros que deben ser mejorados
2. Aada un control proporcional para mejorar el tiempo
de subida3. Aada un control derivativo para mejorar elsobreimpulso
-
8/3/2019 Anlisis dinmico de un Controlador
32/32
4. Aada un control integral para eliminar el erroren rgimen permanente
5. Ajuste los valores de Kp, Ki y Kd paraobtener la respuesta deseada.
6. Recuerde que no siempre se tiene que
implantar los tres modos de control en un nicosistema. Por ejemplo, si un controlador PI proporcionauna respuesta suficientemente buena (como en elejemplo anterior) entonces no es necesario implantar elcontrol derivativo en el sistema.
Mantenga el control tan sencillo como sea posible.