UNIVERSIDAD SIM ´ ON BOL ´ IVAR DECANATO DE ESTUDIOS PROFESIONALES COORDINACI ´ ON DE TECNOLOG ´ IA E INGENIER ´ IA EL ´ ECTRICA AN ´ ALISIS DE ESTABILIDAD TRANSITORIA EN SISTEMAS CON GENERACI ´ ON E ´ OLICA Por: Elikarla Sof´ ıa Cones Tarazona Angelo Mattheu Roviello Jannone PROYECTO DE GRADO Presentado ante la Ilustre Universidad Sim´ on Bol´ ıvar como requisito parcial para optar al t´ ıtulo de Ingeniero Electricista Sartenejas, Marzo de 2012

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

UNIVERSIDAD SIMON BOLIVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACION DE TECNOLOGIA E INGENIERIA ELECTRICA
ANALISIS DE ESTABILIDAD TRANSITORIA EN SISTEMAS CON
GENERACION EOLICA
Por:
Elikarla Sofıa Cones Tarazona
Angelo Mattheu Roviello Jannone
PROYECTO DE GRADO
Presentado ante la Ilustre Universidad Simon Bolıvar
como requisito parcial para optar al tıtulo
de Ingeniero Electricista
Sartenejas, Marzo de 2012

UNIVERSIDAD SIMON BOLIVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACION DE TECNOLOGIA E INGENIERIA ELECTRICA
ANALISIS DE ESTABILIDAD TRANSITORIA EN SISTEMAS CON
GENERACION EOLICA
Por:
Elikarla Sofıa Cones Tarazona
Angelo Mattheu Roviello Jannone
Realizado con la asesorıa de:
Elmer Sorrentino
PROYECTO DE GRADO
Presentado ante la Ilustre Universidad Simon Bolıvar
como requisito parcial para optar al tıtulo
de Ingeniero Electricista
Sartenejas, Marzo de 2012

Generated by CamScanner from intsig.com

Analisis de Estabilidad Transitoria en Sistemas con Generacion Eolica
por
Elikarla S. Cones Tarazona
Angelo M. Roviello Jannone
RESUMEN
En este trabajo se estudio la estabilidad en un sistema con generacion eolica asıncrona,
interconectada con generacion sincronica. Los casos fueron analizados con generadores
de induccion no controlados y con doblemente alimentados. En primer lugar, se tomo
un conocido ejemplo de la literatura que solo tiene generacion sincronica y se analizo la
incorporacion de un generador induccion, con software comercial y con un programa de-
sarrollado especialmente para este proyecto. En segundo lugar, se uso software comercial
para estudiar una representacion academica reducida del sistema electrico de Paraguana
(Venezuela). El efecto de los generadores de induccion sobre la estabilidad transitoria de
los generadores sincronicos fue ampliamente analizado, con las herramientas disponibles,
para los dos tipos de generador de induccion mencionados. Los resultados indican que
los generadores de induccion no controlados tienen un mayor efecto, debido a que oscilan
alrededor de la frecuencia electrica de la red y debido a que contribuyen con la inercia de
todo el sistema. Al evaluar los tiempos crıticos de despeje para evitar inestabilidad de
los generadores sıncronos, se obtuvo que la incorporacion de generadores de induccion al
sistema electrico de Paraguana tiende a disminuirlos.
iv

A Dios, porque sin el
todo lo demas a que
agradecer no existirıa...
Elikarla
A las generaciones venideras...
Angelo
v
AGRADECIMIENTOS
A nuestro tutor, amigo, maestro y guıa, el Profesor Elmer Sorrentino. Usted con su
particular forma de trabajar demostro su confianza en nosotros y nos enseno que la unica
forma de alcanzar la excelencia es a traves del trabajo serio, eficiente y sostenido. Muchas
gracias por sus ensenanzas! Se le quiere!
A los profesores Alexander Bueno, Jose Manuel Aller, Paulo de Oliveira, Jose Vivas,
Jhony Rengifo, Miguel Martinez y Angel Perez por su invaluable orientacion y apoyo.
Muchısimas gracias!
A Benincia y Marıa Teresa, por siempre tener una solucion, un consejo y una sonrisa
de apoyo!
Angelo y Elikarla
A mis padres Anita y Antonio, quienes siempre aplaudieron mis logros y me ayudaron
a aprender de mis tropiezos y a sonreirle a la vida, ademas de inculcarme perseverancia,
valores y llenarme de amor y apoyo. Los AMO, este es un logro de ustedes tambien...
Gracias por poder contar siempre con ustedes, son los mejores padres que un hijo puede
tener. Hey! Fabio... Viviana... mis geniales hermanos :D ustedes se merecen mas de una
lınea y lo saben! Los amo!
A Carolina (BC) y Laura por los infinitos asilos brindados a lo largo del ultimo ano,
ademas de vuestra bonita amistad, llena de apoyo, consejos, paciencia y vivencias. Las
quiero!
A Daniela y Vanessa... GRACIAS TOTALES!!!
A mis hermanos del alma, Cristian Perotti y Radovan Halir por estar ahı durante
tantos anos, creyendo en mı y llenandome de hermosos momentos. Los adoro brothers :D
A mis companeros de carrera, con quienes recorrı este largo camino y recordare siempre:
Peluche, Leopold, Jose Rafael, David, Henry, Vero, Omar, Jose Angel, y demas joyas de
Ing. Electrica! Han sido y seran grandes amigos y companeros de trabajo. Gracias!!!
A Jenny (te quierodbvh...), Karina, Oscar, Leo, Valentina, Javier, Ana, Papa Oso,
Hungaro y demas amigos... Son lo maximo!
A mis companeros en Irradiant: Christian, Jean, Rob, Starly y Daniel por la paciencia
y los frutos obtenidos y por obtener. Ahora a por Oceanian con todos los hierros! :D
Y por ultimo, a mi hermosa golda pechocha companera de tesis odia platillos Elikarla.
Con paciencia, animo, risas y mucho Red Bull recorrimos este largo camino lleno de
vii
aprendizajes. No hubiese podido haberlo logrado sin ti gorda. Te adoro un monton!!!!
IMB... xD Gracias por haber confiado en mi siempre!! ¡3
Angelo
A mis padres Elizabeth y Carlos, a quienes le debo lo que soy y he hecho en mi vida.
Gracias mami por revivir mi fe en los momentos de desesperacion, por recordarme que
lo peor que puede pasar no es tan malo y por ser siempre mi refugio. Gracias heroe, por
haberme ensenado las herramientas que me permitieron terminar este trabajo, por estar
siempre dispuesto a darme tu ayuda, por recordarme que todo tiene su recompensa y que
los meritos se logran solo trabajando duro. Gracias por su amor, los amo.
A mi hermana y mis primos por entender la situacion y siempre tener una sonrisa
alentadora.
A mis abuelos y tıos, en especial a mi Tiuchis y Mirian, por siempre mostrarme que
debıa confiar en mi.
A mis familias: Navas Robles, Torres Farıa y Roviello Jannone, por recibirme y apo-
yarme como una hija.
A Daniela, por ser el soporte tecnico, anımico y espiritual durante la realizacion de este
trabajo.
A mis amigos Vanessa, Vilma, Compa, Isabella y Jose, por recordarme que era “solo
una tesis” y que pronto todo estarıa bien. En especial a Vane, el departamento de estetica
de este trabajo y mi hermana durante toda la carrera, porque siempre estuviste conmigo
apoyandome, entendiendome y adivinando mis necesidades para hacerme sentir mejor.
Y por ultimo, a Angelo, por ser el balance ante mi estres, mis deficiencias y mi mal
humor. Te quiero mafioso!
Elikarla

INDICE GENERAL
INDICE GENERAL VIII
INDICE DE TABLAS XII
INDICE DE FIGURAS XIII
LISTA DE SIMBOLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi
INTRODUCCION 1
1. FUNDAMENTOS SOBRE ESTABILIDAD DE SISTEMAS DE PO-
TENCIA Y SU RELACION CON LA INSTALACION DE CENTROS
DE GENERACION EOLICA 3
1.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2. Estabilidad de angulo del rotor . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3. Energıa eolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.2. Aerogeneradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2. MODELACION DE LA MAQUINA DE INDUCCION PARA ESTU-
DIOS TRANSITORIOS ELECTROMECANICOS 14
2.1. Modelo de la maquina de induccion para estudios en regimen transitorio . 14
2.1.1. Modelo de 5to orden de la maquina de induccion . . . . . . . . . . 14
2.1.2. Modelo de 3er orden de la maquina de induccion . . . . . . . . . . . 15
2.1.3. Modelo de 1er orden de la maquina de induccion . . . . . . . . . . . 16
2.2. Comportamiento dinamico de los generadores de induccion para el estudio
de transitorios electromecanicos . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.1. Lımite estatico de estabilidad de los generadores de induccion . . . 18
2.2.2. Lımite dinamico de estabilidad de los generadores de induccion . . 19
3. MODELACION DEL GENERADORDE INDUCCION DOBLEMENTE
ALIMENTADO 21
3.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2. Operacion supersincronica del DFIG . . . . . . . . . . . . . . . . . . . . . 22
3.3. Modelacion del sistema de control electrico . . . . . . . . . . . . . . . . . . 24
3.3.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.2. Esquema de control de par . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.2.1. Caracterıstica de maxima extraccion de potencia . . . . . 25
ix
3.3.2.2. Diagrama de bloques y modelacion . . . . . . . . . . . . . 27
3.3.3. Esquema de control de voltaje . . . . . . . . . . . . . . . . . . . . . 29
3.3.3.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3.3.2. Diagrama de bloques y modelacion . . . . . . . . . . . . . 30
3.4. Modelacion de la turbina . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4. ANALISIS DE ESTABILIDAD ANTE LA INCORPORACION DE GEN-
ERACION ASINCRONA A UN SISTEMA SINCRONICO TOMADO
DE LA LITERATURA 35
4.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2. Programa computacional desarrollado en Matlab para el estudio de esta-
bilidad clasica de angulo en sistemas electricos de potencia . . . . . . . . . 36
4.2.1. Flujograma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.2.2. Ejemplo de estudio de estabilidad clasica de angulo de sistemas
electricos de potencia empleando SMS . . . . . . . . . . . . . . . . 38
4.3. Programa computacional desarrollado en Matlab para el estudio de esta-
bilidad clasica de angulo de los generadores sincronicos y estabilidad de
velocidad de los generadores de induccion . . . . . . . . . . . . . . . . . . . 40
4.3.1. Flujograma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.2. Ejemplo de estudio de estabilidad clasica de angulo de las maquinas
sincronicas y estabilidad de velocidad de las maquinas asıncronas
empleando SAIMS . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5. ANALISIS DE ESTABILIDAD ANTE LA INCORPORACION DE GEN-
ERACION ASINCRONA EN UNA REPRESENTACION ACADEMI-
CA DEL SISTEMA ELECTRICO DE PARAGUANA 49
5.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2. Caso acoplado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2.1. Cortocircuito trifasico en la lınea El Isiro - Planta Centro a 230KV 50
5.2.1.1. Efecto de la inclusion de un parque eolico en la respuesta
dinamica de los angulos de las maquinas sincronicas . . . . 50
5.2.1.2. Comportamiento dinamico del aerogenerador de velocidad
fija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.2.1.3. Comportamiento dinamico del aerogenerador de velocidad
variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2.2. Cortocircuito trifasico en la lınea Judibana - Punto Fijo II a 115 KV 64
5.2.2.1. Efecto de la inclusion de un parque eolico en la respuesta
dinamica de los angulos de las maquinas sincronicas . . . . 65
x
5.2.2.2. Comportamiento dinamico del aerogenerador de velocidad
fija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2.2.3. Comportamiento dinamico del aerogenerador de velocidad
variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.2.3. Tiempos crıticos de despeje obtenidos de las simulaciones . . . . . . 76
5.3. Caso desacoplado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.3.1. Efecto de la inclusion de un parque eolico en la respuesta dinamica
de los angulos de las maquinas sincronicas . . . . . . . . . . . . . . 77
5.3.1.1. Comportamiento dinamico del aerogenerador de velocidad
fija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.3.1.2. Comportamiento dinamico del aerogenerador de velocidad
variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
CONCLUSIONES 87
REFERENCIAS BIBLIOGRAFICAS 88
A. Modelacion de la maquina de induccion para estudio de regimen tran-
sitorio 90
A.1. Modelo de la maquina de induccion en el sistema de coordenadas abc . . . 91
A.2. Modelacion de la maquina de induccion en el marco de referencia arbitraria
qd0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
A.2.1. Transformacion al marco qd0 de referencia arbitraria para circuitos
estacionarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
A.2.2. Transformacion al marco qd0 de referencia arbitraria para circuitos
rotativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
A.2.3. Modelo de la maquina de induccion en el marco qd0 de referencia
arbitraria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
A.2.4. Sistema en por unidad (pu) . . . . . . . . . . . . . . . . . . . . . . 103
A.2.5. Marco de referencia empleado para la maquina de induccion . . . . 105
A.3. Modelo de la maquina de induccion para estudios de estabilidad . . . . . . 105
A.3.1. Modelo de 5to orden de la maquina de induccion . . . . . . . . . . 105
A.3.2. Modelo de 3er orden de la maquina de induccion . . . . . . . . . . . 106
A.3.3. Modelo de 1er orden de la maquina de induccion . . . . . . . . . . . 107
A.3.4. Modelo transitorio de la maquina de induccion . . . . . . . . . . . . 109
A.4. Consideraciones del modelo de la maquina de induccion para la modelacion
del sistema de control de aerogeneradores . . . . . . . . . . . . . . . . . . . 113
A.4.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
A.4.2. Modelo del generador de induccion en el sistema de referencia dq0 . 113

xi
B. Datos del sistema de 9 barras y datos necesarios y empleados por SMS
y SAIMS 116
B.1. Caso sincronico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
B.1.1. Diagrama unifilar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
B.1.2. Datos del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
B.1.2.1. Lıneas de transmision . . . . . . . . . . . . . . . . . . . . 117
B.1.2.2. Transformadores . . . . . . . . . . . . . . . . . . . . . . . 117
B.1.2.3. Cargas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
B.1.2.4. Maquinas sincronicas . . . . . . . . . . . . . . . . . . . . . 117
B.1.3. Formato de los datos necesarios por el programa para el calculo del
avance de los angulos de las maquinas sincronicas . . . . . . . . . . 118
B.1.4. Flujo de carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
B.2. Caso asincronico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
B.2.1. Consideraciones para el caso asincronico . . . . . . . . . . . . . . . 120
B.2.2. Formato de los datos necesarios por el programa para el calculo del
avance de los angulos de las maquinas sincronicas y velocidad de
las maquinas de induccion . . . . . . . . . . . . . . . . . . . . . . . 121
C. Datos del sistema electrico de Paraguana 124
C.1. Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
C.2. Diagrama unifilar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
C.3. Datos del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
C.3.1. Lıneas de transmision . . . . . . . . . . . . . . . . . . . . . . . . . . 125
C.3.2. Transformadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
C.3.3. Cargas y compensacion reactiva . . . . . . . . . . . . . . . . . . . . 127
C.3.4. Sistema equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
C.3.5. Maquinas sincronicas . . . . . . . . . . . . . . . . . . . . . . . . . . 129
C.3.6. Aerogeneradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131

INDICE DE TABLAS
5.1. Tiempos crıticos de despeje de la falla en la lınea El Isiro - Planta Centro
para distintos niveles de penetracion de generacion eolica . . . . . . . . . . 76
5.2. Tiempos crıticos de despeje de la falla en la lınea Judibana - Punto Fijo II
para distintos niveles de penetracion de generacion eolica . . . . . . . . . . 77

INDICE DE FIGURAS
1.1. Esquema del aerogenerador con generador de induccion cortocircuitado [1] 8
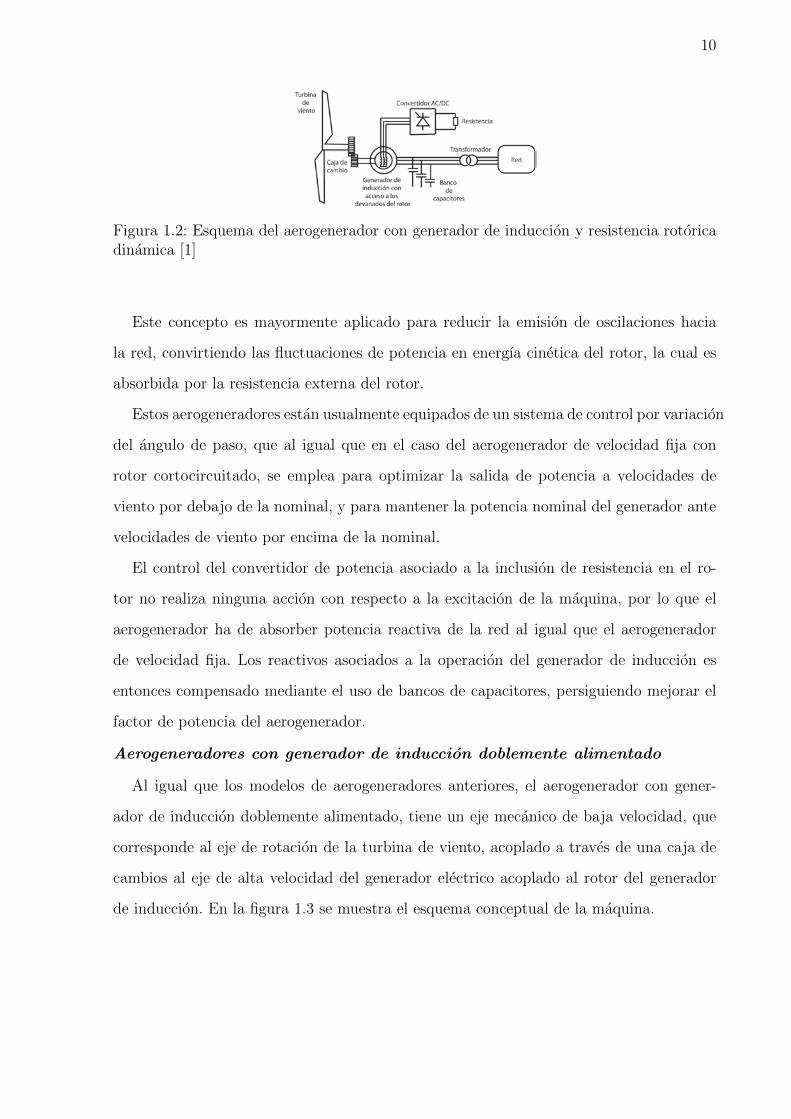
1.2. Esquema del aerogenerador con generador de induccion y resistencia rotori-
ca dinamica [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3. Esquema del aerogenerador con generador de induccion doblemente ali-
mentado [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4. Esquema del aerogenerador con generador de induccion con convertidores
electronicos de carga plena [1] . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1. Lımite estatico de estabilidad del generador de induccion . . . . . . . . . . 19
2.2. Lımite dinamico de estabilidad del generador de induccion . . . . . . . . . 20
3.1. Tipos de operacion del DFIG . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2. Diagrama fasorial en operacion supersincronica del DFIG [2] . . . . . . . . 23
3.3. Caracterıstica de la turbina de viento para maxima extraccion de potencia
[2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.4. Caracterıstica de torque maximo para el DFIG [2] . . . . . . . . . . . . . . 27
3.5. Diagrama de bloques del esquema de control de par [2] . . . . . . . . . . . 27
3.6. Diagrama de bloques del esquema de control de voltaje [2] . . . . . . . . . 30
4.1. Flujograma del programa SMS . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2. Angulo de las maquinas sincronicas en SMS . . . . . . . . . . . . . . . . . 39
4.3. Angulo de las maquinas sincronicas en Neplan . . . . . . . . . . . . . . . . 39
4.4. Flujograma del programa SAIMS - Parte I . . . . . . . . . . . . . . . . . . 41
4.5. Flujograma del programa SAIMS - Parte II . . . . . . . . . . . . . . . . . 42
4.6. Angulo de las maquinas sincronicas y velocidad de los generadores del sis-
tema de 9 barras con generador de induccion . . . . . . . . . . . . . . . . 46
4.7. Potencia activa de las maquinas sincronicas y Par y Tension en terminales
de la maquina de induccion del sistema de 9 barras con generador de in-
duccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.1. Codigo de colores de los generadores sincronicos . . . . . . . . . . . . . . . 50
5.2. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.3. Potencia activa [MW] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.4. Potencia activa del generador sincronico Coro II [MW] . . . . . . . . . . . 55

xiv
5.5. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack sin parque eolico . . . . . . . . . . . . . . . . . . . . . . . 56
5.6. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack con parque eolico de velocidad fija . . . . . . . . . . . . . 57
5.7. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack con parque eolico de velocidad variable . . . . . . . . . . . 58
5.8. Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg . . 59
5.9. Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg . . 60
5.10. Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg 62
5.11. Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg 63
5.12. Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable con
H1
= 2 seg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.13. Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable con
H2
= 9 seg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.14. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack para falla trifasica en la lınea Judibana - Punto Fijo II . . 66
5.15. Evolucion transitoria de la Potencia activa de las maquinas sincronicas
[MW] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.16. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack sin parque eolico . . . . . . . . . . . . . . . . . . . . . . . 68
5.17. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack con parque eolico de velocidad fija . . . . . . . . . . . . . 69
5.18. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack con parque eolico de velocidad variable . . . . . . . . . . . 70
5.19. Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg . . 71
5.20. Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg . . 72
5.21. Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg 73
5.22. Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg 74
5.23. Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable con
H1
= 2 seg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.24. Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable con
H2
= 9 seg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.25. Diferencias angulares de los rotores de los generadores sincronicos respecto
a la barra slack para falla trifasica en L6 . . . . . . . . . . . . . . . . . . . 79
5.26. Evolucion transitoria de la potencia activa de las maquinas sincronicas
[MW] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.27. Evolucion transitoria de la velocidad de las maquinas sincronicas [pu] . . . 81
5.28. Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg . . 82

xv
5.29. Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg . . 83
5.30. Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg 84
5.31. Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg 85
5.32. Vdr, Vqr, idr e iqr del inversor. . . . . . . . . . . . . . . . . . . . . . . . . . 86
A.1. Circuitos del rotor y el estator de la maquina de induccion [3] . . . . . . . 91
A.2. Transformacion a coordenadas qd0 de circuitos estacionarios [4] . . . . . . 96
A.3. Transformacion a coordenadas qd0 de circuitos rotativos [4] . . . . . . . . . 100
A.4. Circuito equivalente del modelo transitorio en coordenadas qd0 . . . . . . 103
A.5. Modelo transitorio de la maquina de induccion . . . . . . . . . . . . . . . 112
B.1. Unifilar del sistema IEEE de 9 barras . . . . . . . . . . . . . . . . . . . . . 116
B.2. Formato de los datos empleados por el programa que calcula el avance del
angulo de las maquinas sincronicas del problema de estabilidad clasica de
angulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
B.3. Datos del caso IEEE 9 barras empleados por el programa computacional . 119
B.5. Diagrama unifilar del sistema 9 barras con la incorporacion del generador
de induccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
B.4. Flujo de carga inicial del sistema de 9 barras original . . . . . . . . . . . . 120
B.6. Curva de potencia activa y reactiva de la maquina de induccion empleado
en el caso asincronico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
B.7. Formato de los datos empleados por el programa que calcula el avance del
angulo de las maquinas sincronicas del problema de estabilidad clasica de
angulo y de velocidad de las maquinas de induccion . . . . . . . . . . . . . 122
B.8. Datos del sistema 9 barras empleados por SAIMS . . . . . . . . . . . . . . 123
C.1. Diagrama unifilar del sistema electrico de la Penınsula de Paraguana. Modo
acoplado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
C.2. Interfaz grafica de la turbina eolica en Neplan 5.4.5 . . . . . . . . . . . . . 132

LISTA DE SIMBOLOS
¯�abcr Vector de enlaces de flujo del rotor
¯�abcs Vector de enlaces de flujo del estator
¯ abcr
0Vector de enlaces de flujo por unidad de tiempo del rotor referidos al estator
¯ abcs Vector de enlaces de flujo por unidad de tiempo del estator
¯fabcr Vector de cantidades instantaneas de las fases a,b y c del rotor
¯fabcr0Vector de cantidades instantaneas de las fases a, b y ce del rotor referidas al estator
¯fabcs Vector de cantidades instantaneas de las fases a,b y c del estator
¯f0qd0r Vector de cantidades instantaneas en los ejes qd0 del rotor
¯fqd0s Vector de cantidades instantaneas en los ejes qd0 del estator
Kr Matriz de transformacion directa del marco de referencia abc al marco de referencia
arbitraria qd0 del rotor
Kr�1
Matriz de transformacion inversa del marco de referencia abc al marco de referencia
arbitraria qd0 del rotor
Ks Matriz de transformacion directa del marco de referencia abc al marco de referencia
arbitraria qd0
Ks�1
Matriz de transformacion inversa del marco de referencia abc al marco de referencia
arbitraria qd0 del estator
Lr Matriz de inductancias del rotor
Lr
0Matriz de inductancias del rotor referidas al estator
Lsr Matriz de inductancias mutuas entre el rotor y el estator
Lsr
0Matriz de inductancias mutuas entre el rotor y el estator referidas al estator
Ls Matriz de inductancias del estator

xvii
Rr Matriz diagonal de la resistencia del rotor
Rs Matriz diagonal de la resistencia del estator
� Posicion angular de referencia del marco de referencia qd0 para circuitos rotativos
v0dr
Voltaje instantaneo del eje directo del rotor referido al estator
vds
Voltaje instantaneo del eje directo del estator
v0qr
Voltaje instantaneo del eje en cuadratura del rotor referido al estator
vqs
Componente en cuadratura del voltaje del estator [pu]
vqs
Voltaje instantaneo del eje en cuadratura del estator
Xss
Reactancia del estator
! Velocidad de rotacion del marco de referencia arbitrario qd0
!r Velocidad angular del rotor [rad/S]
!s Velocidad angular del estator [pu]
0dr Flujo instantaneo del eje directo del rotor referido al estator
ds Flujo instantaneo del eje directo del estator
0qr Flujo instantaneo del eje en cuadratura del rotor referido al estator
qs Flujo instantane0 del eje en cuadratura del estator
✓ Angulo de la fase A del rotor que adelanta a la fase a del estator [rad]
d Eje directo
E0ds Voltaje tras reactancia transitoria del eje directo
E0qs Voltaje tras reactancia transitoria del eje en cuadratura
H Constante de inercia
J Inercia
Llr Inductancia de fuga del rotor

xviii
Lls Inductancia de fuga del estator
Lmr Inductancia magnetizante del rotor
Lms Inductancia magnetizante del estator
Lm Inductancia mutua
L0rr Inductancia equivalente del rotor referido al estator
Lsr Amplitud de la inductancia mutua entre kis devanados del estator y el rotor
Lss Inductancia equivalente del estator
Nr Numero de vueltas equivalentes del rotor
Ns Numero de vueltas equivalentes del estator
P Potencia activa
q Eje en cuadratura
Re Resistencia del thevenin del estator y la magnetizacion de la maquina de induccion
rs Resistencia del estator [pu]
s Deslizamiento [pu]
Te Torque electrico
TL Torque mecanico
To Constante de tiempo de circuito abierto de la maquina de induccion
Ve Voltaje en terminales del thevenin equivalente de la maquina de induccion
Xe Reactancia del thevenin del estator y la magnetizacion de la maquina de induccion
Xm Reactancia mutua
X0rr Reactancia del rotor referida al estator
Xs Reactancia transitoria de la maquina de induccion
INTRODUCCION
En este trabajo se realizo un estudio sobre la estabilidad transitoria en sistemas electri-
cos de potencia que tienen generacion eolica asıncrona y generacion sincronica. El objetivo
es evaluar el efecto de la inclusion de parques eolicos conformados por aerogeneradores de
velocidad fija o por aerogeneradores de velocidad variable, en la estabilidad transitoria del
sistema de potencia. Este es un tema que aun requiere investigacion tanto en el ambito
nacional como internacional. El aumento del monto de generacion eolica en el mundo
en los ultimos anos ha sido impresionante y en Venezuela se espera que pronto entre en
funcionamiento el primer parque eolico, especıficamente en la Penınsula de Paraguana.
Previo a este estudio, se han realizado trabajos de investigacion relacionados con el
estudio de estabilidad de sistemas de potencia con generacion eolica. No se pretende
presentar una revision detallada de la abundante bibliografıa existente, sino referenciar
algunos documentos revisados para realizar este trabajo. En [5] y [6], ambos proponen un
modelo que describe el comportamiento transitorio de las maquinas de induccion. Espe-
cialmente en [6] se hace una comparacion entre los modelos de quinto y tercer orden de la
maquina de induccion, donde se demuestra que el modelo de tercer orden reproduce con
un alto nivel de precision el comportamiento de las maquinas, en cuyo caso se recomienda
el uso del mismo por su similitud al modelo de las maquinas sincronicas empleado en
estudios de estabilidad clasica. En [7] se presenta una metodologıa para la seleccion de
los puntos mas aptos de interconexion de un parque eolico a una red de distribucion,
analizando el efecto en la tension del punto de interconexion ante la operacion del par-
que. En [8] se presentan herramientas metodologicas y resultados practicos que permiten
determinar el maximo nivel de penetracion eolica en el sistema electrico. Se consideran
aerogeneradores de velocidad fija con y sin capacidad de operacion durante fallas, para
distintos escenarios de demanda y generacion. En [9] se presenta la gestion, operacion y
control de un parque eolico costa afuera dotado de generadores de induccion doblemente
alimentados y conectados a la orilla por un sistema de transmision de corriente continua
en alta tension (HVDC) conmutado por red.

2
En la Universidad Simon Bolıvar se han realizado algunos trabajos relacionados con
este tema. En uno de ellos [10] se propone una modelacion para los componentes de
un sistema electrico mixto diesel-eolico y se realizo un estudio de estabilidad transitoria
dinamica, utilizando un algoritmo computacional que simula las rafagas de viento, en el
cual se consideraron como variables de interes el voltaje y frecuencia de la red. En otro
estudio [11] se hace una evaluacion tecnico-economica con el fin de determinar la factibil-
idad de la instalacion de un parque eolico en la zona oeste de la Isla de Margarita. Se
establecen los niveles de potencia eolica que pueden implantarse en el sistema electrico
en base a los resultados de los estudios de flujo de carga y estabilidad transitoria. Adi-
cionalmente se determina el equipamiento requerido ası como los costos asociados. Otro
estudio [12] plantea los lineamientos a seguir para la interconexion de parques eolicos a
los sistemas electricos evaluando principalmente la estabilidad en regimen permanente y
ante perturbaciones, aplicando modelos dinamicos en todos los componentes. En [13] se
realiza un estudio que permite definir el porcentaje de generacion eolica que puede ser
incluido en el sistema electrico de la Isla de Margarita sin afectar negativamente la esta-
bilidad, ademas de demostrar la necesidad de compensacion reactiva cuando la tecnologıa
presente en el parque eolico instalado es de turbinas eolicas que operan a velocidad fija.
Adicionalmente en este estudio se realiza una revision de diversas normativas europeas
relativas a la interconexion de parques eolicos a sistemas de potencia.

CAPITULO 1
FUNDAMENTOS SOBRE ESTABILIDAD DE SISTEMAS DE POTENCIA
Y SU RELACION CON LA INSTALACION DE CENTROS DE
GENERACION EOLICA
1.1 Generalidades
La estabilidad de sistemas de potencia se define como la capacidad del sistema, da-
da una condicion de operacion inicial, de poder recuperarse y retornar a un punto de
operacion en equilibrio luego de haber sufrido una perturbacion [3]. Situaciones de con-
tingencia tıpicas en un sistema electrico, tales como cambios pronunciados en los niveles
de carga, cortocircuitos, apertura o cierre de lıneas de transmision, ası como la salida
y/o entrada en servicio de unidades de generacion, son capaces de ocasionar operaciones
consideradas como inestables. Segun [14] los estudios de estabilidad se divide en tres tipos:
Estabilidad de angulo, que se refiere a la capacidad de las maquinas sincronicas
del sistema de potencia interconectado para permanecer en sincronismo luego de
haber sido sujetas a una perturbacion. Depende de la habilidad para mantener o
restaurar el equilibrio entre el torque electromagnetico y el torque mecanico de cada
maquina sincronica en el sistema. La inestabilidad que pudiese resultar se manifiesta
en aumento en las oscilaciones angulares de algunos generadores que conduce a su
perdida de sincronismo con otros generadores.
Estabilidad de voltaje, que se refiere a la capacidad del sistema de potencia para
mantener voltajes estacionarios en todas las barras del sistema luego de haber sufri-
do una perturbacion. Depende de la habilidad para mantener o restaurar el equilibrio
entre la carga demandada y la carga suplida por el sistema de potencia. La inesta-

4
bilidad que pudiese resultar se manifiesta como caıda o incremento progresivo de la
tension en algunas barras del sistema. Un posible resultado de la inestabilidad de
tension es la perdida de carga en un area, o el disparo de las lıneas de transmision
u otros elementos por sus sistemas de proteccion, lo que lleva a fallas en cascada.
La perdida de sincronismo de algunos generadores puede resultar de estas interrup-
ciones, o tambien de condiciones de operacion que violan lımites de corriente.
Estabilidad de frecuencia, que se refiere a la capacidad del sistema de potencia
para mantener equilibrio en las frecuencias despues de una perturbacion grave en el
sistema, que resulta en un desequilibrio importante entre la generacion y la carga.
Depende de la capacidad de mantener o restablecer el equilibrio entre generacion
y carga, con una perdida mınima o intencional de la carga. La inestabilidad que
pueda resultar se manifiesta en oscilaciones de frecuencia que lleva al disparo de las
unidades de generacion y/o cargas.
Cuando se interconecta a una red sincronica un centro de generacion eolica, a pesar de
que es posible encontrar en el mercado aerogeneradores cuyas turbinas eolicas accionan
maquinas sincronicas, es mas comun el uso de maquinas de induccion debido a la nat-
uraleza variable del viento como fuente primaria del proceso de conversion de energıa.
En presencia de maquinas de induccion operando como generador, la clasificacion de los
estudios de estabilidad no abarca de manera precisa los fenomenos fısicos presentes en
la operacion del sistema de potencia bajo situacion de contingencia. Al no tratarse de
maquinas sincronicas, el concepto de estabilidad de angulo queda completamente descar-
tado. El concepto de estabilidad de frecuencia tambien ha de ser desechado ya que luego
de una perturbacion, la frecuencia del sistema se mantiene dentro de valores aceptables y,
en el caso de estabilidad de tension, la maquina de induccion no representa una carga, por
lo que invalida el criterio relativo al balance entre carga y generacion. Por estas razones,
y pensando en terminos de la fısica subyacente a los fenomenos dinamicos asociados a un
sistema de potencia en presencia de generadores de induccion (o asincronicos), algunos
autores [15] proponen un estudio de estabilidad centrado en la velocidad rotorica de las
maquinas de induccion, basado en la dependencia presente entre el par y la velocidad de
5
estas maquinas.
Se define entonces como “estabilidad de velocidad del rotor” a la capacidad de las
maquinas de induccion de permanecer conectadas al sistema de potencia y operando a
una velocidad mecanica cercana a la velocidad correspondiente a la frecuencia real del
sistema luego de haber sido este sometido a una perturbacion.
En un sistema de potencia con generacion eolica, durante la ocurrencia de una falla
aparece de un torque acelerante que incrementa la velocidad del rotor de las maquinas
sıncronas y asıncronas. Si el despeje de la falla no se realiza antes que los rotores de las
maquinas de induccion alcancen un valor crıtico a partir del cual las velocidades prefalla
no pueden reestablecerse, es posible que, en funcion de la magnitud de la penetracion
eolica, el sistema caiga en una situacion de inestabilidad ocasionada por la velocidad de
los rotores.
1.2 Estabilidad de angulo del rotor
La estabilidad de angulo del rotor se define como la habilidad de las maquinas inter-
conectadas en un sistema de potencia a permanecer en sincronismo. Cuando un grupo de
generadores funcionan en sincronismo, las diferencias angulares entre ellos se mantienen
constantes, al igual que sus velocidades electricas. La perdida de sincronismo ocurre cuan-
do se viola esta condicion, considerandose esta como una operacion inestable.
Existe una estrecha relacion entre el comportamiento de la potencia que manejan los
generadores y las oscilaciones de sus angulos. Por esta razon, al realizarse un estudio de
estabilidad de angulo, estos deben monitorearse en todos los generadores del sistema rela-
tivos a una maquina de referencia, ya que cualquier desbalance entre la potencia mecanica
aplicada al rotor y la potencia electrica transferida a la red se refleja en oscilaciones an-
gulares.
En sıntesis, el problema de estabilidad involucra el estudio de las oscilaciones elec-
tromecanicas propias de los sistemas de potencia. Si ocurriese una perturbacion, los rotores
de los generadores sufrirıan una aceleracion o desaceleracion que se debe a la aparicion
de un par acelerante generado por el desbalance entre el par mecanico y el par electrico

6
de la maquina. Esto trae como consecuencia que las velocidades relativas de las maquinas
crezcan o decrezcan segun sea el caso, apareciendo una diferencia angular respecto a la
maquina de referencia. Mas alla de ciertos lımites propios cada sistema, de sobrepasarse
un umbral de diferencia angular crıtico, el sistema operarıa en forma inestable. La perdi-
da de estabilidad dependera de la capacidad que tenga el sistema de manejar la energıa
cinetica resultante de las diferencias de velocidad entre uno o varios rotores.
Estabilidad transitoria
Se define la estabilidad transitoria como la capacidad que posee el sistema en mantener
el sincronismo mientras esta sujeto a grandes perturbaciones. Depende basicamente de la
severidad de la perturbacion y de las condiciones iniciales o prefalla del sistema. Los
intervalos de tiempo para estudios de estabilidad transitoria oscilan entre los tres (3)
y cinco (5) segundos luego de la perturbacion. La inestabilidad llega a presentarse en
oscilaciones angulares no periodicas que responden a la deficiencia de torque sincronizante.
Existen diversos factores que pueden influir en la estabilidad transitoria de un sistema de
potencia. A continuacion se mencionan los mas importantes:
Nivel de carga de los generadores.
Tiempos de despeje de la falla.
Estado del sistema de transmision en condicion post-falla.
Valor de la reactancia del generador. Bajas reactancias incrementan la potencia pico
y disminuyen el valor del angulo inicial del rotor.
La inercia del rotor del generador. A mayor inercia menor sera la tasa de cambio
del angulo del rotor, lo que reduce la energıa cinetica absorbida por el generador
durante la falla.
7
1.3 Energıa eolica
1.3.1. Generalidades
La energıa cinetica del viento es aprovechada por turbinas eolicas capaces de trans-
formar esta energıa en energıa mecanica, la cual acciona maquinas electricas rotativas
que realizan el proceso de conversion de energıa mecanica a electrica, con la finalidad de
inyectarla al sistema de potencia para su posterior transmision, distribucion y consumo.
Las maquinas capaces de realizar el proceso de conversion de energıa cinetica del viento
a energıa electrica se conocen como aerogeneradores. Para maximizar la rentabilidad en
la instalacion y operacion de estos equipos, e incrementar en lo posible la confiabilidad,
los aerogeneradores suelen agruparse en concentraciones denominadas parques eolicos.
1.3.2. Aerogeneradores
En un enfoque orientado al estudio y la modelacion, mas que en una clasificacion
sistematica de sus partes, es posible descomponer el aerogenerador en diferentes sistemas.
Cada uno de estos sistemas juega un rol especıfico en el proceso de conversion de energıa.
Dichos sistemas son:
Sistema aerodinamico: es el sistema encargado de la transformacion de la energıa
cinetica del viento en un torque mecanico capaz de accionar el eje de la maquina
rotativa encargada de la generacion electrica.
Sistema mecanico: esta encargado de acoplar a traves de una caja convertidora al
sistema aerodinamico del rotor de la turbina con el rotor del generador electrico.
Sistema electrico: es el sistema que realiza la conversion de energıa mecanica en
energıa electrica.
Sistema de control: es el sistema encargado de la regulacion. Puede ser mecanico o
electrico.
Acorde a la combinacion y caracterısticas de estos sistemas, es posible agrupar los aero-
generadores en dos grandes grupos:

8
Aerogeneradores de velocidad fija, tıpicamente dotados de un generador de induccion
con rotor jaula de ardilla y pueden o no tener aplicado un control mecanico.
Aerogeneradores de velocidad variable, que tienen asociados a los generadores de
induccion convertidores con electronica de potencia, responsables de ejercer acciones
de control. Tambien pueden o no tener un control mecanico aplicado.
A continuacion se presenta una descripcion de los principales tipos de aerogeneradores,
los cuales son fabricados en diversas companıas y son de amplio uso en los parques eolicos
en todo el mundo.
Aerogeneradores de velocidad fija
Aerogeneradores con generador de induccion con rotor cortocircuitado
En el concepto del aerogenerador mostrado en la figura 1.1 el rotor de la turbina es
acoplado al del generador a traves de un sistema de ejes, donde el circuito del estator del
generador esta conectado a la red de potencia. Este esquema es llamado de velocidad fija
porque presenta bajo condiciones normales de operacion un estrecho rango de variaciones
de la velocidad.
Figura 1.1: Esquema del aerogenerador con generador de induccion cortocircuitado [1]
Las maquinas de induccion operando como generadores suplen de potencia activa a la
red mientras absorbe de ella potencia reactiva necesaria para su excitacion. Debido a que
el generador de induccion es de rotor cortocircuitado, la maquina no tiene capacidad de
regulacion de potencia reactiva, y requiere que el voltaje de la red se mantenga en un
valor cercano a su valor nominal. Sin embargo, este tipo de maquinas esta usualmente

9
equipada con un banco de capacitores, cuyo objetivo es la reduccion de la demanda de
potencia reactiva de la red y mejorar el factor de potencia del aerogenerador.
El sistema de transmision mecanica contiene un eje de baja velocidad, acoplado a la
turbina de viento, y un eje de alta velocidad acoplado al rotor del generador, conectados
a traves de una caja de cambios. Los aerogeneradores de velocidad fija pueden ser de
angulo de paso fijo o controlado. El control por variacion del angulo de paso es aplicado a
aerogeneradores de velocidad fija para mejorar su eficiencia y eliminar las variaciones de la
potencia entregada debido a variaciones en la densidad del aire. Este control es sintonizado
con el objetivo de optimizar la salida de potencia cuando el valor de velocidad del viento
se encuentra por debajo de su nivel nominal, y para mantener la salida de potencia a la
potencia nominal cuando la velocidad del viento excede los niveles nominales. Asociado
al control mecanico existe la posibilidad de disparo del aerogenerador por sobrevelocidad.
Aerogeneradores de velocidad variable
La operacion a velocidad variable implica que la velocidad del rotor puede estar en el
rango, en condiciones de regimen permanente, de -50% al 15% con respecto a la velocidad
sincronica dependiendo del viento entrante. Dinamicamente la velocidad del rotor puede
variar hasta por encima del 30% sobre la velocidad sincronica.
Aerogeneradores con generador de induccion y resistencia rotorica dinamica
La figura 1.2 muestra un esquema conceptual de un aerogenerador de velocidad variable
parcial equipado con un generador de induccion con resistencia dinamica en el rotor. En
este concepto, el circuito del rotor es conectado a un convertidor electronico encargado
de la incorporacion de una resistencia conectada en serie con el circuito del rotor. El
control dinamico de la resistencia del rotor permite la operacion de la maquina en un
rango mucho mas amplio de deslizamientos a velocidades supersincronicas que en el caso
de los aerogeneradores con generador de induccion de rotor cortocircuitado.
10
Figura 1.2: Esquema del aerogenerador con generador de induccion y resistencia rotoricadinamica [1]
Este concepto es mayormente aplicado para reducir la emision de oscilaciones hacia
la red, convirtiendo las fluctuaciones de potencia en energıa cinetica del rotor, la cual es
absorbida por la resistencia externa del rotor.
Estos aerogeneradores estan usualmente equipados de un sistema de control por variacion
del angulo de paso, que al igual que en el caso del aerogenerador de velocidad fija con
rotor cortocircuitado, se emplea para optimizar la salida de potencia a velocidades de
viento por debajo de la nominal, y para mantener la potencia nominal del generador ante
velocidades de viento por encima de la nominal.
El control del convertidor de potencia asociado a la inclusion de resistencia en el ro-
tor no realiza ninguna accion con respecto a la excitacion de la maquina, por lo que el
aerogenerador ha de absorber potencia reactiva de la red al igual que el aerogenerador
de velocidad fija. Los reactivos asociados a la operacion del generador de induccion es
entonces compensado mediante el uso de bancos de capacitores, persiguiendo mejorar el
factor de potencia del aerogenerador.
Aerogeneradores con generador de induccion doblemente alimentado
Al igual que los modelos de aerogeneradores anteriores, el aerogenerador con gener-
ador de induccion doblemente alimentado, tiene un eje mecanico de baja velocidad, que
corresponde al eje de rotacion de la turbina de viento, acoplado a traves de una caja de
cambios al eje de alta velocidad del generador electrico acoplado al rotor del generador
de induccion. En la figura 1.3 se muestra el esquema conceptual de la maquina.

11
Figura 1.3: Esquema del aerogenerador con generador de induccion doblemente alimentado[1]
La particularidad de este tipo de aerogenerador radica en que no solo el estator
esta conectado a la red, al igual que en el resto de los modelos planteados, sino tam-
bien el rotor a traves de un convertidor electronico AC/DC/AC mediante el uso de anillos
deslizantes. Este convertidor es necesario para desacoplar electricamente el circuito del
rotor operando a frecuencia variable con respecto a la red que opera a frecuencia fija,
ejerciendo un control dinamico sobre el rotor de la maquina.
Gracias a esta configuracion es posible la operacion de los aerogeneradores en un amplio
rango de velocidades, optimizando ası la extraccion de potencia del equipo. Adicional-
mente estos aerogeneradores cuentan con un sistema de control del angulo de paso, el
cual al igual que en los casos anteriores es empleado para optimizar la salida de potencia
a velocidades de viento inferiores a la nominal, y para sostener la potencia nominal de
salida una vez que se ha excedido dicha velocidad. Sin embargo, dado que la velocidad
de respuesta del control mecanico es mucho mas lenta que la velocidad de respuesta del
controlador electronico, es posible que este control mecanico sea un factor de retraso en
la obtencion optima de potencia.
Por otra parte, el convertidor electronico conectado al circuito rotorico permite un
control independiente de las potencias activas y reactivas, con lo que el generador de
induccion a diferencia de las otras configuraciones no es excitado desde la red. Este con-
vertidor permite la sintonizacion del control del generador para el control de la potencia
reactiva y de esta manera dar soporte en el mantenimiento de los voltajes del sistema en
presencia o no de perturbaciones.
El convertidor de electronica de potencia del lado del rotor alimenta el circuito del

12
rotor del generador haciendo que la operacion del convertidor del rotor corresponda a
la adicion de un fasor externo de voltaje en serie con el circuito del rotor. Este fasor
externo de voltaje es controlado de manera que la frecuencia electrica del circuito del rotor
corresponda a la velocidad deseada del rotor. En condiciones normales de operacion, la
velocidad del rotor es ajustada por el control del convertidor del rotor para optimizar la
salida de potencia, por lo que el circuito del rotor opera a frecuencia electrica variable. El
convertidor del lado red balancea la potencia inyectada en el enlace DC del sistema del
convertidor con respecto a la potencia activa intercambiada con la red. En comparacion al
generador de induccion convencional el DFIG presenta ventajas que dependen del arreglo
de la frecuencia del control del convertidor como: habilidad para el control de reactivos y
soporte de voltaje en la red, control desacoplado de la potencia activa y reactiva.
Aerogeneradores con generador de induccion con convertidores electronicos
de carga plena
La caracterıstica distintiva de este tipo de aerogenerador, cuyo esquema se muestra en
la figura 1.4, se basa en la conexion del generador de induccion a la red a traves de un
convertidor electronico AC/DC/AC. Este convertidor electronico adicionalmente provee
la energıa reactiva necesaria para la excitacion del generador de induccion, y su control es
sintonizado para hacer un manejo optimo de la potencia activa, ası como para controlar
la absorcion de dicha potencia reactiva.
Figura 1.4: Esquema del aerogenerador con generador de induccion con convertidoreselectronicos de carga plena [1]
Es importante mencionar que este tipo de generador absorbe una mayor cantidad
de potencia reactiva ante condiciones de vientos fuertes, por lo que usualmente se hace
13
necesaria la conexion adicional de un banco de capacitores que sirvan de soporte a la red
para suplir la energıa de magnetizacion de la maquina, a diferencia del DFIG que es capaz
de prescindir de esta compensacion.
Por otra parte, el sistema mecanico, al igual que en los demas aerogeneradores, consiste
en un eje de baja y alta velocidad acoplados a traves de una caja de cambios. Sin embargo,
gracias a que la frecuencia electrica del generador es mas baja que la de la red de potencia
esta caja de cambios tiene un radio mucho menor que en las demas configuraciones.
Finalmente, este tipo de equipos puede estar dotado de control del angulo de las palas,
con el objetivo de optimizar la extraccion de potencia ante vientos ligeros y para mantener
la operacion a potencia nominal ante fuertes condiciones de viento.

CAPITULO 2
MODELACION DE LA MAQUINA DE INDUCCION PARA ESTUDIOS
TRANSITORIOS ELECTROMECANICOS
2.1 Modelo de la maquina de induccion para estudios en regimen transitorio
Una maquina de induccion puede representarse de varias maneras en funcion del nivel
de precision que se requiera para evaluar su comportamiento en un estudio determinado.
En funcion de esto se definen tres modelos para representar una maquina de induccion en
estudios de regımenes transitorios: el modelo de quinto orden, el modelo de tercer orden
y el modelo de primer orden de la maquina de induccion, su deduccion se presenta en el
Apendice A y a continuacion se presentan las ecuaciones obtenidas para cada uno.
2.1.1. Modelo de 5to orden de la maquina de induccion
A partir de las ecuaciones generales de la maquina de induccion en el sistema de
referencia qd0 girando a velocidad sincronica (ecuaciones A.93 a A.100), es posible obtener
las ecuaciones del modelo de 5to orden con el siguiente conjunto de ecuaciones extraıdas
de la deduccion del Apendice A, empleando los flujos como variables de estado del sistema
de ecuaciones, y mostrando en dicho Apendice la expresion necesaria para la obtencion
de las corrientes.
vqs
=rs
X0rr
Xss
X0rr
� X2
m
qs
+1
!base
d qs
dt+
!
!base
ds
�rs
Xm
Xss
X0rr
� X2
m
0
qr
(2.1)

15
vds
= � !
!base
qs
+rs
X0rr
Xss
X0rr
� X2
m
ds
+1
!base
d ds
dt�
rs
Xm
Xss
X0rr
� X2
m
0
dr
(2.2)
v0
qr
= �r
0r
Xm
Xss
X0rr
� X2
m
qs
+r
0r
Xss
Xss
X0rr
� X2
m
0
qr
+1
!base
d 0qr
dt+
✓! � !r
!base
◆
0
dr
(2.3)
v0
dr
= �r
0r
Xm
Xss
X0rr
� X2
m
ds
�✓! � !r
!base
◆
0
qr
+r
0r
Xss
Xss
X0rr
� X2
m
0
dr
+1
!base
d 0dr
dt(2.4)
Este sistema de ecuaciones, junto con la ecuacion mecanica que se presenta a contin-
uacion conforman el llamado modelo de 5to orden de la maquina de induccion.
Te
= 2Hd!r
dt+ T
L
(2.5)
Donde
Te
= p
✓X
m
Xss
X 0rr
� X2
m
◆✓1
!base
◆(
qs
dr
0 � 0
qr
ds
) (2.6)
Este modelo de la maquina es ampliamente usado para el estudio de fenomenos electro-
magneticos, por lo que tambien se le conoce como modelo transitorio electromagnetico, ya
que es el que describe el comportamiento dinamico de los flujos electromagneticos tanto
del estator como del rotor de la maquina de induccion.
2.1.2. Modelo de 3er orden de la maquina de induccion
Un modelo menos preciso de la maquina de induccion se obtiene al despreciar los
transitorios electromagneticos del estator, lo cual corresponde a ignorar la componente de
corriente directa en las corrientes transitorias del estator, permitiendo la representacion
de solo las componentes de la frecuencia fundamental. De este modo, igualando a cero las
ecuaciones 2.2 y 2.1 y agregando las ecuaciones 2.6 y 2.5 que describen el comportamiento
16
mecanico de la maquina se obtiene el siguiente sistema de ecuaciones, llamado modelo de
tercer orden de la maquina de induccion:
vqs
=rs
X0rr
Xss
X0rr
� X2
m
qs
+!
!base
ds
�rs
Xm
Xss
X0rr
� X2
m
0
qr
(2.7)
vds
= � !
!base
qs
+rs
X0rr
Xss
X0rr
� X2
m
ds
�rs
Xm
Xss
X0rr
� X2
m
0
dr
(2.8)
v0
qr
= �r
0r
Xm
Xss
X0rr
� X2
m
qs
+r
0r
Xss
Xss
X0rr
� X2
m
0
qr
+1
!base
d 0qr
dt+
✓! � !r
!base
◆
0
dr
(2.9)
v0
dr
= �r
0r
Xm
Xss
X0rr
� X2
m
ds
�✓! � !r
!base
◆
0
qr
+r
0r
Xss
Xss
X0rr
� X2
m
0
dr
+1
!base
d 0dr
dt(2.10)
Este modelo menos detallado, es comunmente empleado en el estudio de fenomenos elec-
tromecanicos, por lo que se le conoce tambien como modelo electromecanico de la maquina
de induccion.
2.1.3. Modelo de 1er orden de la maquina de induccion
El modelo de 1er orden de la maquina de induccion, conocido tambien como modelo
en regimen permanente de la maquina de induccion, es el modelo dinamico mas simple de
una maquina de induccion dado que solo considera la dinamica del sistema mecanico. El
modelo consiste en una unica ecuacion diferencial, la ecuacion 2.5, y el calculo del torque
electrico de la maquina corresponde a la ecuacion deducida en el Apendice A:
Te =R0
r
s!s
V 2
e
(Re +Rr0
s)2 + (X 0
r +Xe)(2.11)
Donde
Ve =jXmVs
Rs + j(Xs +Xm)(2.12)

17
y
Re + jXe =jXm(Rs + jXm)
Rs + j(Xs +Xm)(2.13)
2.2 Comportamiento dinamico de los generadores de induccion para el estudio
de transitorios electromecanicos
La evaluacion del comportamiento de la maquina en regimen transitorio es deducible
a partir del modelo de primer orden de la maquina de induccion descrito en la seccion
anterior. Considere que la maquina de induccion operando como generador se acelera
debido a una falla en la red, la cual puede ser por ejemplo, un cortocircuito que forza
el aumento del torque electrico de la maquina para alimentarlo. La aceleracion de la
maquina de induccion se describe entonces a partir de la ecuacion 2.5, la cual fue escrita
en convencion generador para su mayor comprension:
2Hd!r
dt= T
L
�Te
(2.14)
Esta ecuacion muestra como la maquina se acelera una vez que el desbalance del torque
por la salida adicional de potencia; tal incremento de la velocidad se traduce en un in-
cremento del deslizamiento de la maquina suponiendo fija la frecuencia electrica de la
red.
Ahora, a partir del diagrama circuital de la maquina en regimen permanente, se puede
extraer que la impedancia vista por los terminales del generador es:
Zth = Rth + jXth (2.15)
Donde
Rth(s) = Rs +R0
r
sX2
m⇣R0
r
s
⌘2
+ (Xm +X 0r)
2
(2.16)
18
y
Xth(s) = Xs +
Xm
✓⇣R0
r
s
⌘2
+X 0r(Xm +X 0
r)
◆
⇣R0
r
s
⌘2
+ (Xm +X 0r)
2
(2.17)
Si la barra de conexion de la maquina tiene un nivel de cortocircuito finito, el voltaje
en esta barra depende de la velocidad de rotacion de la maquina porque su absorcion de
reactivos, Qe, depende de su velocidad:
Qe = V 2
s
Xth(s)
R2
th(s) +X2
th(s)(2.18)
Por lo que se espera que ante tales condiciones de desbalance en el torque de la maquina
el efecto no sea solo el de acelerarse, sino tambien la depresion de su voltaje en terminales
gracias al incremento de la potencia reactiva de la maquina. Este fenomeno hace que el
estudio dinamico de las maquinas de induccion este ıntimamente relacionado al estudio
de estabilidad de voltaje, sin embargo, tal estudio esta fuera del alcance de este trabajo.
2.2.1. Lımite estatico de estabilidad de los generadores de induccion
Al igual que la curva de potencia activa electrica de las maquinas sincronicas permite
la definicion de su angulo de carga maximo, las maquinas de induccion presentan una
velocidad o deslizamiento maximo de operacion, definida por su curva de torque electrico
caracterıstica.
La Figura 2.1una curva de torque versus velocidad de la maquina de induccion operando
como generador, en la que puede observarse que los posibles estados de operacion en
regimen permanente deben estar en el rango entre velocidad 1 en por unidad y la velocidad
!k, limitando a la maquina a operar a un torque igual o menor a su torque maximo, por lo
que se define el punto de operacion de velocidad !k como el lımite estatico de estabilidad
de los generadores de induccion.

19
Figura 2.1: Lımite estatico de estabilidad del generador de induccion
2.2.2. Lımite dinamico de estabilidad de los generadores de induccion
Considerese de nuevo el caso en el que ocurre una falla trifasica en la red. Tal y
como se menciono anteriormente esta falla produce la aparicion de un torque acelerante
que incrementa la velocidad del rotor de la maquina. Cuando la falla es despejada, el
generador de induccion sera capaz de retornar a su punto de operacion regular si la
velocidad mecanica de la maquina no excede el deslizamiento crıtico scr, definiendose este
como el punto de mayor deslizamiento en el que se cumple que:
Tm = Te (2.19)
tal deslizamiento crıtico es mayor al deslizamiento maximo correspondiente al lımite
estatico de la seccion anterior. Entonces, si se excede tal lımite de deslizamiento crıtico, el
generador de induccion continuara acelerandose sin control, caso en el que la desconexion
y uso de un freno sera necesaria para detener el generador.
20
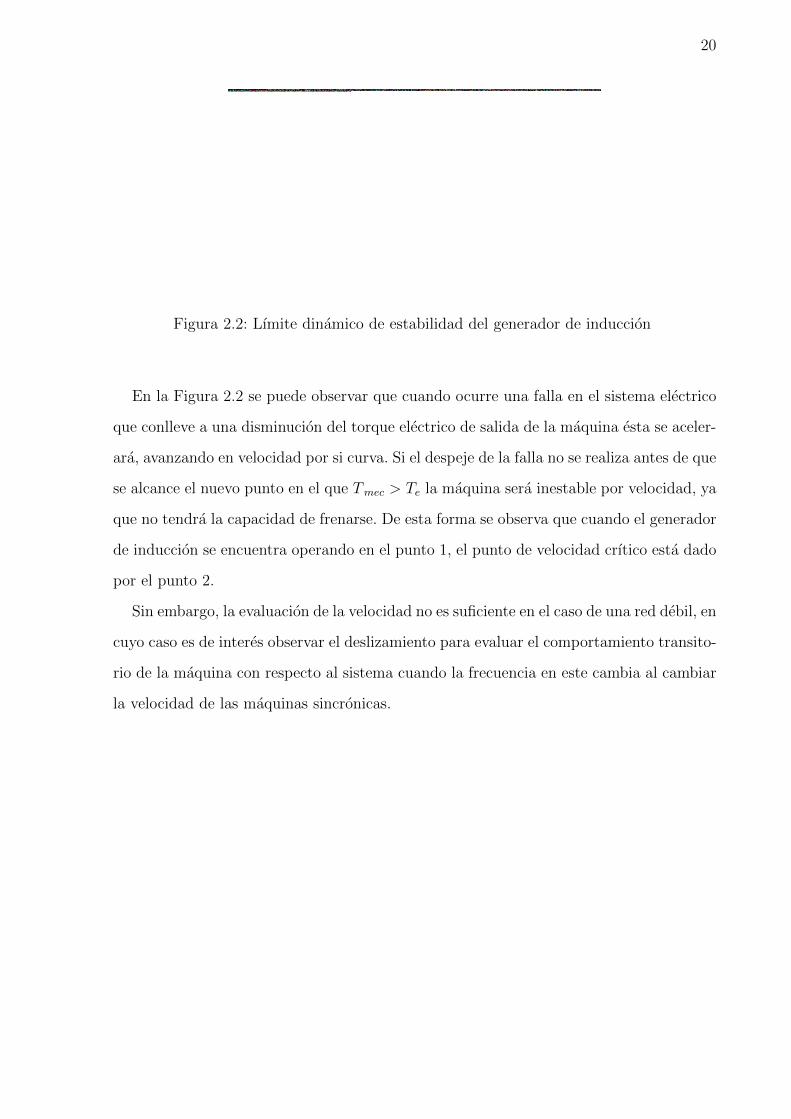
Figura 2.2: Lımite dinamico de estabilidad del generador de induccion
En la Figura 2.2 se puede observar que cuando ocurre una falla en el sistema electrico
que conlleve a una disminucion del torque electrico de salida de la maquina esta se aceler-
ara, avanzando en velocidad por si curva. Si el despeje de la falla no se realiza antes de que
se alcance el nuevo punto en el que Tmec > Te la maquina sera inestable por velocidad, ya
que no tendra la capacidad de frenarse. De esta forma se observa que cuando el generador
de induccion se encuentra operando en el punto 1, el punto de velocidad crıtico esta dado
por el punto 2.
Sin embargo, la evaluacion de la velocidad no es suficiente en el caso de una red debil, en
cuyo caso es de interes observar el deslizamiento para evaluar el comportamiento transito-
rio de la maquina con respecto al sistema cuando la frecuencia en este cambia al cambiar
la velocidad de las maquinas sincronicas.
CAPITULO 3
MODELACION DEL GENERADOR DE INDUCCION DOBLEMENTE
ALIMENTADO
3.1 Generalidades
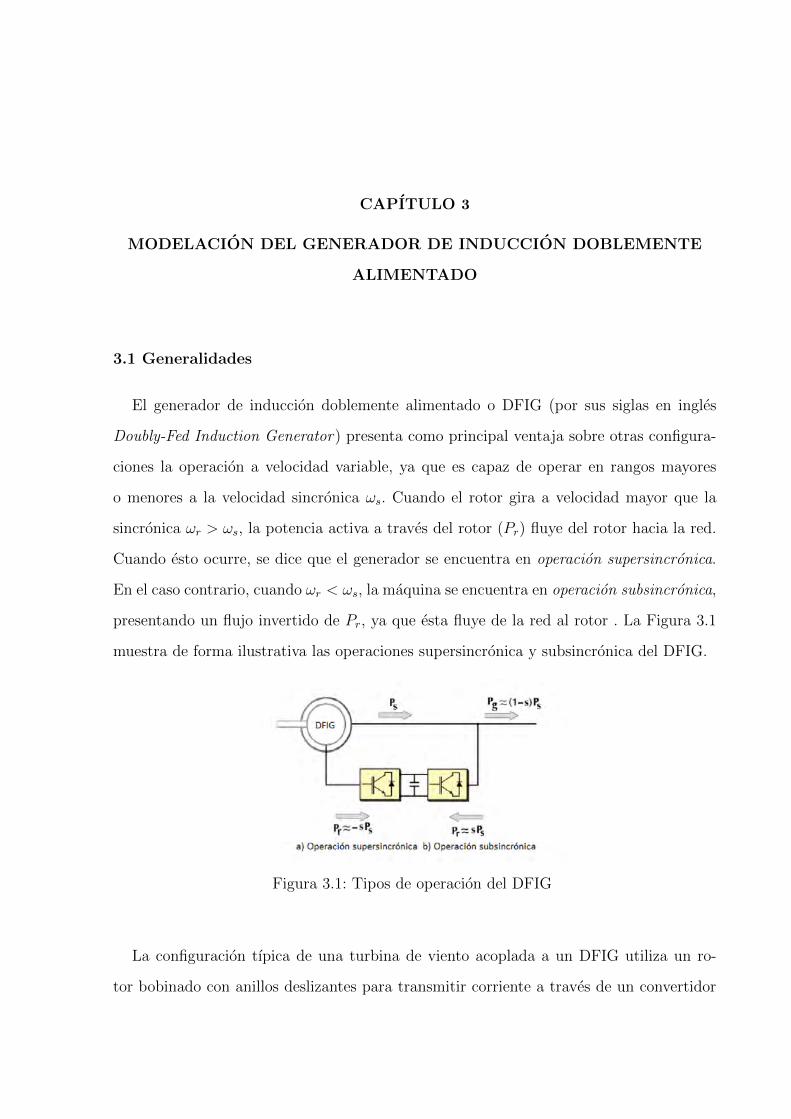
El generador de induccion doblemente alimentado o DFIG (por sus siglas en ingles
Doubly-Fed Induction Generator) presenta como principal ventaja sobre otras configura-
ciones la operacion a velocidad variable, ya que es capaz de operar en rangos mayores
o menores a la velocidad sincronica !s. Cuando el rotor gira a velocidad mayor que la
sincronica !r > !s, la potencia activa a traves del rotor (Pr) fluye del rotor hacia la red.
Cuando esto ocurre, se dice que el generador se encuentra en operacion supersincronica.
En el caso contrario, cuando !r < !s, la maquina se encuentra en operacion subsincronica,
presentando un flujo invertido de Pr, ya que esta fluye de la red al rotor . La Figura 3.1
muestra de forma ilustrativa las operaciones supersincronica y subsincronica del DFIG.
Figura 3.1: Tipos de operacion del DFIG
La configuracion tıpica de una turbina de viento acoplada a un DFIG utiliza un ro-
tor bobinado con anillos deslizantes para transmitir corriente a traves de un convertidor

22
encargado de la regulacion tanto de par y potencia como de tension y reactivos. La op-
eracion a velocidad variable se obtiene a traves de la inyeccion de un voltaje controlado al
rotor. El devanado del rotor es alimentado a traves de un convertidor de frecuencia vari-
able, (tambien llamado Regulador, Inversor o Convertidor) conformado por dos inversores
AC/DC conectados entre sı a traves de un enlace DC. La alimentacion del rotor a traves
del convertidor de frecuencia variable permite el desacople entre la velocidad mecanica
del rotor fijada por la velocidad del viento y la referencia de frecuencia electrica de la red.
Esta configuracion cuenta ademas de la electronica de potencia, con un sistema de
control mecanico que actua sobre las aspas de la turbina regulando el angulo de incidencia
del viento, responsable tambien de fijar la potencia de referencia PRefelect del regulador. En
regimen permanente la potencia de salida del DFIG debe coincidir con la referencia de
potencia dada por la turbina, y en condicion de falla y postfalla, las posibles oscilaciones
deben ocurrir alrededor de estos valores de referencia.
3.2 Operacion supersincronica del DFIG
El responsable de la operacion a velocidad variable del DFIG es el sistema de regulacion
que interconecta el rotor y el estator de la maquina a traves de un puente inversor de
electronica de potencia. Este convertidor consta de dos unidades de IGBT unidas por una
conexion en corriente directa con un condensador de alisamiento. Los niveles de potencia
que maneja suelen ser del orden del 25 al 30% de la potencia nominal de la turbina.
Como la potencia del rotor es directamente proporcional a la potencia del estator, en
principio, podrıa permitirse que la variacion de velocidad sea del 100%. Sin embargo,
el dimensionamiento usual de la electronica de potencia es reducido a un 30% de la
potencia nominal de la turbina, lo que corresponde con los maximos niveles de operacion
subsincronica y supersincronica posibles del aerogenerador, normalmente entre 0.7!s y
1.3!s respectivamente.
En la Figura 3.2 se muestra un diagrama fasorial en los ejes d-q que muestra la operacion
supersincronica del DFIG. El objetivo de esta seccion es mostrar la proporcionalidad
existente entre el voltaje interno del generador Eg y la tension rotorica Vr de la maquina

23
de induccion y su relacion con el deslizamiento s y aspectos constructivos de la maquina,
util a posteriori en la modelacion del sistema de control electrico y la comprension de su
funcionamiento tanto en regimen transitorio como en regimen permanente.
Figura 3.2: Diagrama fasorial en operacion supersincronica del DFIG [2]
Recapitulando brevemente, en las ecuaciones A.151, A.151 y A.152 se definio la corri-
ente del estator, el voltaje del rotor y la tension interna del generador respectivamente en
sus componentes en cuadratura y directa. La tension interna del generador E 0 depende
de la magnitud del enlace de flujo del rotor �r, como se muestra en las ecuaciones A.143
y A.144. Este flujo viene manipulado por el sistema de control mediante ajustes sobre Vr.
La variacion en el tiempo de la tension interna de la maquina de induccion viene dada
por la ecuacion A.178.
En intervalos muy cortos de tiempo, puede aproximarse el comportamiento de E 0 como
constante [2]. Manipulando la ecuacion A.161 al igualar d ¯E0
dt= 0 y despejando de A.1 se
obtiene:
0 = � 1
!sTo
⇣E 0 � j(Xss �X
0
ss)Is⌘+ jsE 0 � j
Lm
L0rr
Vr (3.1)
Tıpicamente, el termino � 1
!sToes mucho menor que los terminos jsE 0 y j Lm
L0rrVr. Por
esta razon puede despreciarse y replantear la ecuacion 3.1 como:
sE 0 ⇡ Lm
L0rr
Vr (3.2)

24
La ecuacion 3.2 plantea una relacion matematica entre el voltaje interno de la maquina,
su tension rotorica, el deslizamiento y un cociente entre parametros constructivos asocia-
dos a las inductancias propias de la maquina consecuencia de su diseno. Las acciones de
control que se pudiesen realizar sobre la operacion de la maquina (definidas en magnitud
por el cociente entre inductancias) de ser aplicadas sobre el rotor tendrıan un efecto sobre
el deslizamiento (asociado al par y a la velocidad de la maquina) y/o sobre el voltaje
interno de la maquina (asociado a la tension en bornes y al flujo de reactivos). En efecto,
el sistema de control del DFIG ejerce acciones de control directamente en el rotor de
la maquina, fijando valores de tension a traves de inyecciones de corriente en el rotor
regulando ası la potencia activa y reactiva del aerogenerador..
3.3 Modelacion del sistema de control electrico
3.3.1. Generalidades
Si se compara el DFIG con otras configuraciones de aerogeneradores con generador de
induccion, este ofrece mayores posibilidades de control. Las variaciones de la velocidad
en el rotor se compensan ajustando la tension en el rotor, ejerciendo ası control dinamico
sobre el par y la tension en bornes de la maquina. Esta estrategia es llamada Modo
de Control PVdq [2]. Las siglas “PVdq” corresponden con las variables que regula (PV,
potencia y voltaje) y el marco de referencia sobre el cual se basa la modelacion (dq por las
componentes o ejes directo “d” y en cuadratura “q”). En efecto, cada eje es responsable
de la regulacion de una variable en particular, lo que permite esquematizar el sistema de
control en dos esquemas independientes:
1. Esquema de control de par, asociado a la componente en cuadratura.
2. Esquema de control de voltaje, asociado a la componente directa.
En situaciones de contingencia, a diferencia de otras configuraciones de aeogeneradores,
el DFIG es capaz de mantenerse operativo gracias a las acciones de control del regulador,
cuya versatilidad y diseno permiten el manejo de las oscilaciones ocasionadas por los

25
desbalances en los flujos de potencia del sistema, favoreciendo la estabilidad. Sin embargo,
pueden presentarse situaciones que obliguen su desconexion.
Por ejemplo, ante huecos de tension pronunciados, difıcilmente manejables por el es-
quema de control de voltaje, el esquema de control de par continua su accion de regulacion
tratando de ajustar la salida de potencia lo mas cercana posible a aquella fijada como ref-
erencia. Para compensar los bajos niveles de tension y mantener la entrega de potencia, la
respuesta natural del generador es elevar significativamente las corrientes rotoricas. Para
evitar que estas elevadas corrientes entren al convertidor, el rotor viene cortocircuitado
por un dispositivo llamado active crowbar, conformado por dos disposiciones de diodos o
tiristores situados entre el rotor y la parte del convertidor conectado a el. Este dispositivo,
si bien forma parte del bloque regulador, y su actuacion pude verse reflejada en las vari-
ables de salida del DFIG, es considerado un dispositivo de proteccion de sobrecorriente
en el regulador, por lo que su estudio queda fuera del alcance de este trabajo.
3.3.2. Esquema de control de par
El sistema de control que poseen los generadores de induccion doblemente alimentados,
ejerce control directo sobre el par electromagnetico a traves de inyecciones de corriente
en el rotor, obedeciendo a una referencia de potencia activa correspondiente con el punto
de maxima extraccion de potencia para una velocidad de viento dada. Una vez fijado
ese punto de operacion en el control, este, independientemente de la inercia que posea el
sistema mecanico formado por la turbina eolica, la caja multiplicadora y el rotor de la
maquina de induccion, modifica el par para que las variaciones de velocidad de rotacion
del rotor en condicion de regimen transitorio sean mınimas.
3.3.2.1. Caracterıstica de maxima extraccion de potencia
Durante el proceso de conversion de energıa mecanica del viento (responsable del
accionamiento de la turbina eolica) a energıa cinetica rotacional (responsable del ac-
cionamiento electrico del generador de induccion), no es posible superar el 59.3% de la
potencia mecanica que es capaz de absorber la turbina. Este fenomeno, conocido como
Lımite de Betz [16], es ajeno al diseno de la turbina y se atribuye a razones aerodinamicas
que van mas alla del alcance de este trabajo. Sin embargo, para distintas velocidades de

26
viento, existe un coeficiente de potencia Cpmaxique corresponde con el maximo valor de
potencia extraıble del viento por la turbina.
En la Figura 3.3 se muestra, para diferentes valores de viento, una curva de cuya
interseccion de maximos (asociados a cada Cpmaxi) se obtiene una curva que corresponde
con la maxima potencia generada para diferentes velocidades de viento, que sirve como
referencia al control mecanico para definir los valores de PRefelect que gobiernan las acciones
de control del regulador.
Figura 3.3: Caracterıstica de la turbina de viento para maxima extraccion de potencia [2]
La ecuacion 3.3 corresponde con la Caracterıstica de maxima extraccion de potencia. El
valor de la constante Koptima, es de caracter aerodinamico y viene dado por el fabricante.
Popt = Koptima!3
r (3.3)
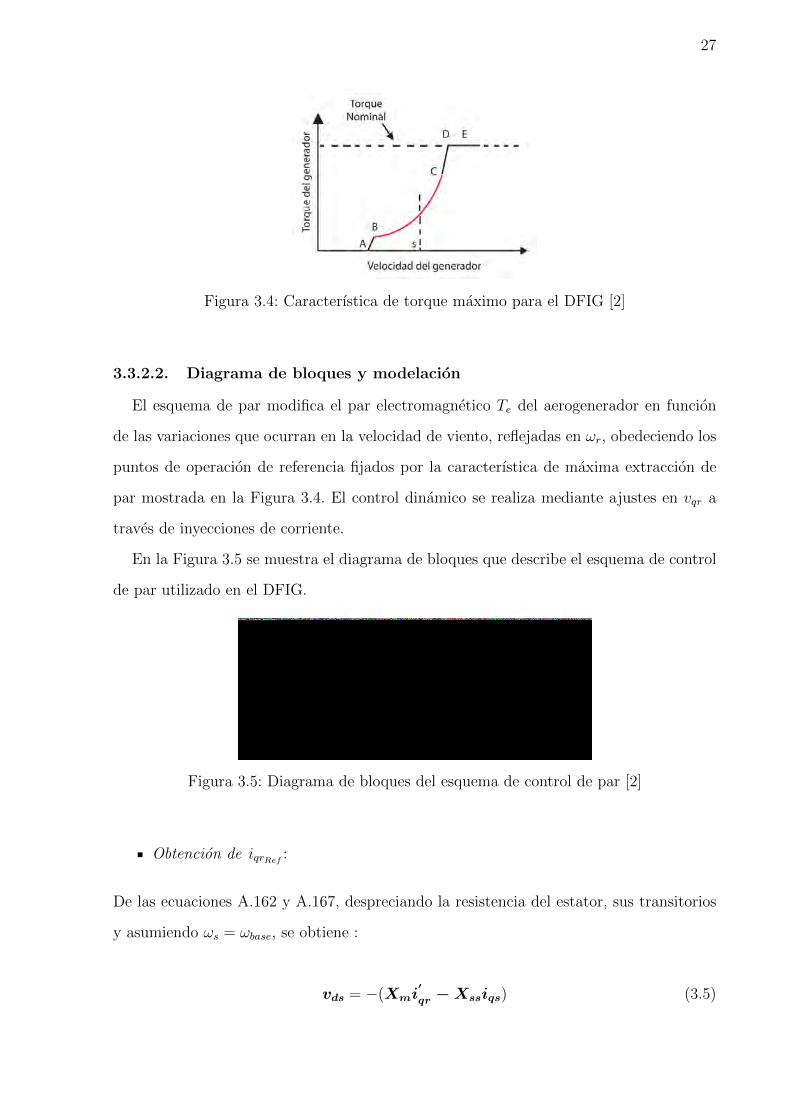
Para la maxima extraccion de potencia, la curva de maximo par mostrada en la Figura
3.4 es caracterizada por la ecuacion 3.4, valida entre los puntos B y C [2].
Topt = Koptima!2
r (3.4)
27
Figura 3.4: Caracterıstica de torque maximo para el DFIG [2]
3.3.2.2. Diagrama de bloques y modelacion
El esquema de par modifica el par electromagnetico Te del aerogenerador en funcion
de las variaciones que ocurran en la velocidad de viento, reflejadas en !r, obedeciendo los
puntos de operacion de referencia fijados por la caracterıstica de maxima extraccion de
par mostrada en la Figura 3.4. El control dinamico se realiza mediante ajustes en vqr a
traves de inyecciones de corriente.
En la Figura 3.5 se muestra el diagrama de bloques que describe el esquema de control
de par utilizado en el DFIG.
Figura 3.5: Diagrama de bloques del esquema de control de par [2]
Obtencion de iqrRef:
De las ecuaciones A.162 y A.167, despreciando la resistencia del estator, sus transitorios
y asumiendo !s = !base, se obtiene :
vds
= �(Xm
i0
qr
� Xss
iqs
) (3.5)

28
Analogamente, de las ecuaciones A.163 y A.166:
vqs
= (Xm
i0
dr
� Xss
ids
) (3.6)
De la Figura 3.2 se observa que vds
= 0. Considerando esto, y manipulando la ecuacion
3.5 se obtiene una expresion para iqs
:
iqs
= i0
qr
Xm
Xss
(3.7)
Igualmente, de la ecuacion 3.6 se obtiene una expresion para ids:
ids
= i0
dr
Xm
Xss
� vqs
1
Xss
(3.8)
De la ecuacion A.83, al considerar solo un par de polos y en por unidad, se obtiene una
expresion para Te de la forma:
Te
= Lm
(iqs
i0
dr
� ids
i0
qr
) (3.9)
Sustituyendo la ecuaciones 3.7 y 3.8 en la ecuacion 3.9 se obtiene:
Te
= Xm
i0
dr
✓i0
qr
Xm
Xss
◆� i
0
qr
✓idr
Xm
Xss
� vqs
1
Xss
◆�(3.10)
Operando la ecuacion 3.10 y despejando iqr se obtiene:
i0
qr
= Te
Xss
Xm
vqs
(3.11)
Renombrando las variables iqr y Te en la ecuacion 3.11 como iqrRefy Topt respecti-
vamente, se obtiene una expresion para senal de referencia de corriente que resulta del
tratamiento de senales realizada por la primera etapa del esquema de regulacion de par,
mostrada en la ecuacion 3.12. La senal de error resultante de la comparacion entre la
medicion de iqr realizada por el convertidor y la senal iqrRefes procesada por la segunda

29
etapa correspondiente al bloque PI del regulador.
i0
qrRef= T
opt
Xss
Lm
vqs
(3.12)
Obtencion de vqr:
De las ecuaciones A.169y A.165, despreciando los transitorios del rotor se obtiene:
v0
qr
= r0
r
i0
qr
+ s!s
!base
(X0
rr
i0
dr
� Xm
ids
) (3.13)
Sustituyendo ids de la ecuacion 3.8 en la ecuacion 3.13 se obtiene el voltaje vqr a inyectar
por el convertidor
v0
qr
= r0
r
i0
qr
+ s!s
!base
i0
dr
✓X
0
rr
�X2
m
Xss
◆� v
qs
Xm
Xss
(3.14)
donde el termino de compensacion sumado a v0qr para obtener vqr de la Figura 3.5 a
inyectar al rotor corresponde con la suma algebraica de los terminos s !s
!basei0dr
⇣X
0rr
� X
2m
Xss
⌘
y �vqs
Xm
Xss.
3.3.3. Esquema de control de voltaje
3.3.3.1. Generalidades
La potencia reactiva entregada por el DFIG no es la suma de la potencia del estator y
del rotor, como ocurre en el caso de la potencia activa. La potencia reactiva no puede fluir
por el convertidor de frecuencia conectado al rotor debido al enlace en corriente continua
que une el lado rotor del inversor con el lado rotor. Por lo tanto, la potencia reactiva total
entregada a la red es la suma de la potencia reactiva del estator y la potencia reactiva
en el convertidor conectado a la red. Este convertidor funciona normalmente a factor de
potencia unitario, y la potencia reactiva total es igual a la potencia reactiva del estator.
El esquema de control de voltaje persigue ejercer control directo sobre el factor de
potencia de la maquina, regulando el manejo de reactivos y en consecuencia la tension en
bornes del DFIG. El control dinamico se realiza mediante ajustes en vdr. Estos ajustes, re-
alizados con inyecciones de idr, obedecen a condiciones particulares de operacion cuyo con-
trol dinamico implica niveles de complejidad mayores respecto al tratamiento de senales

30
de control que realiza el esquema de control de par. Como toda maquina de induccion,
el DFIG requiere un mınimo de consumo de reactivos para su magnetizacion. En aras de
servir como soporte de tension a la red manteniendo la potencia reactiva cero a la salida,
el regulador debe ser capaz de manejar las corrientes de forma inteligente para cumplir
ambos propositos. Para esto, el regulador separa idr en dos componentes, como se muestra
en la ecuacion 3.15:
idr = idrm + idrg (3.15)
donde
idr�m: Componente responsable de la magnetizacion del generador. Regula el factor
de potencia de la maquina.
idr�g: Componente responsable del flujo de reactivos entre la maquina de induccion
y la red de potencia. Regula el voltaje en terminales.
3.3.3.2. Diagrama de bloques y modelacion
En la Figura 3.6 se muestra el diagrama de bloques que describe el esquema de control
de voltaje utilizado en el DFIG.
Figura 3.6: Diagrama de bloques del esquema de control de voltaje [2]
El flujo de reactivos a traves del rotor del DFIG corresponde con la siguiente expresion:
Qr
= Im⇥V
r
I⇤r
⇤(3.16)
Convenientemente referido al estator como Q0r, puede ser escrito como un producto
entre terminos de variables del rotor y una constante 1
A[2], como se muestra en la ecuacion

31
3.17. Esta constante genera una amplificacion conveniente para el tratamiento de senales
de control, razon por la cual se adjudica la accion de regulacion de tension al lado rotor
del convertidor.
Q0r
= Im
V
r
I⇤r
A
�(3.17)
donde A 2 <. Sea entonces
Q0r
= Qs
= Im⇥V
r
I⇤r
⇤= v
qs
ids
� vds
iqs
(3.18)
Segun la Figura 3.2 puede observarse que vds = 0. Considerando esto, despejando ids
de la ecuacion A.166 y sustituyendo en la ecuacion 3.18 se tiene que:
Qs
= vqs
✓i0
dr
Xm
Xss
� ds
1
Xss
◆(3.19)
De la ecuacionA.163, despreciando rs puede obtenerse una expresion para ds. Susti-
tuyendo en la ecuacion 3.19 la expresion obtenida para ds y sustituyendo idr tal y como
se expresa en la ecuacion 3.15se obtiene:
Qs
=�idrm + i
drg
�vqs
Xm
Xss
�v2
qs
Xss
(3.20)
Aplicando a Qs la misma separacion por componentes hecha para idr en la ecuacion
3.15 se obtienen:
Qsm=
�v2
qs
Xss
+ vqs
Xm
Xss
idrm (3.21)
Qsg = v
qs
Xm
Xss
idrg (3.22)
Para servir de soporte de tension a la red, el DFIG debe operar sin absorber reactivos,
lo que se traduce matematicamente en igualar a cero la componente de magnetizacion
de los reactivos de la maquina asociada a la ecuacion 3.21. Para lograr esto, el valor de

32
idrmdebe corresponder con:
idrm =
vqs
Xm
(3.23)
Debido a que el voltaje en bornes de la maquina de induccion debe incrementarse o
disminuir en funcion de los reactivos entregados o absorbidos de la red, el esquema de
control de tension debe cumplir con dos requerimientos principales para mantener nulo el
flujo de reactivos:
1. La potencia reactiva que habrıa de consumir el DFIG debe ser compensada por la
componente de directa de la corriente rotorica encargada de la magnetizacion idrm .
2. Si la tension en bornes es muy baja o muy alta comparada con la referencia, el
regulador debe realizar ajustes sobre la componente idrg .
Si es necesario mantener la corriente del rotor en como mınimo iRefdr = 0, la corriente
consumida por la maquina para mantener la el flujo de campo sera proporcionada por
el componente directa de la corriente estatorica ids, ya que efectivamente,idr = 0 . Por
lo tanto, la tension en los terminales se reduce como resultado de la potencia reactiva
absorbida por la maquina [2].
Si por el contrario, la tension del rotor vdr, que se obtiene se utiliza para controlar
la tension en bornes o el factor de potencia del DFIG manteniendo constante el flujo de
campo de la maquina, entonces idr 6= 0 [2].
En resumen, el funcionamiento del convertidor del lado del rotor con respecto a la
tension en los bornes o el control del factor de potencia es totalmente dependiente de los
requisitos operativos del sistema. La expresion para vdr es equivalente a la resta entre los
terminos de la ecuacion A.164 y el termino de compensacion correspondiente a la senal
s !s
!baseidr
⇣Xrr � X2
m
Xss
⌘adicionada en el ultimo sumador previo a la salida del diagrama de
bloques de la Figura 3.6.
3.4 Modelacion de la turbina
Para la modelacion de una turbina eolica se incluyen tres sistemas principales:
33
1. La turbina eolica
2. El sistema de control mecanico
3. El acoplamiento mecanico con el rotor del generador
En el presente trabajo, se incluyo, para las simulaciones con DFIG la turbina eolica con
sus tres componentes principales. Se utilizo el modelo de una masa para el acoplamiento
mecanico, ya que se ignoran las torsiones mecanicas en los ejes.
El control de la potencia por variacion del angulo de paso de las palas es un proceso
mecanico, a traves del cual se regula el angulo de paso de pala en los aerogeneradores, per-
mitiendo extraer la maxima energıa del viento. En un generador eolico puede aumentarse
el deslizamiento una vez se este cerca de la potencia nominal de la turbina. Usualmente
se hace funcionar el generador a la mitad de su deslizamiento maximo cuando la turbina
esta funcionando proxima a su potencia nominal.
Se diferencian dos estrategias de control de potencia, segun que la potencia generada
este por encima o por debajo del regimen de funcionamiento nominal:
Cuando sopla una rafaga de viento, se supera la potencia nominal; las senales del
mecanismo de control hacen que el deslizamiento aumente permitiendo que el rotor
gire un poco mas rapidamente, hasta que el mecanismo de cambio de paso de las
palas pueda hacer frente a la situacion, orientandolas, pasando a capturar menos
potencia del viento; una vez que el mecanismo de cambio de paso ha hecho su
trabajo, el deslizamiento disminuye de nuevo.
En el caso de que el viento caiga de repente, el mecanismo aplicado es el inverso. El
control comprueba varias veces por segundo la potencia generada, al igual que en
el caso anterior, y como interesa capturar la maxima energıa posible del viento, el
control modifica el angulo de paso al optimo.
El mecanismo de cambio del angulo de paso suele ser hidraulico o mediante motores de
corriente continua. Para las simulaciones con DFIG, a pesar que el control no realiza
ninguna funcion que afecte las variables de salida, es necesario incluirlo ya que es la

34
turbina quien fija la potencia de referencia para cada velocidad de viento, razon por la
cual ha de ser incluida en la modelacion.

CAPITULO 4
ANALISIS DE ESTABILIDAD ANTE LA INCORPORACION DE
GENERACION ASINCRONA A UN SISTEMA SINCRONICO TOMADO
DE LA LITERATURA
4.1 Generalidades
El analogo del estudio de estabilidad de angulo de las maquinas sincronicas en las
maquinas de induccion corresponde al estudio de su velocidad. Ambos estudios estan
asociados a la evaluacion de la estabilidad del sistema de potencia en funcion del avance
de estas variables mecanicas una vez que en el sistema ocurre una perturbacion fuerte.
El analisis del comportamiento de estas variables se hace en este capıtulo, en el que
inicialmente se describe el procedimiento a seguir en un estudio de estabilidad clasica en
un sistema en el que solo hay maquinas sincronicas conectadas, a traves del flujograma
de un programa computacional desarrollado en Matlab, bautizado SMS por sus siglas
en ingles Synchronous Machine Stability. Posteriormente, se evaluo la respuesta de tal
programa a traves de la resolucion del problema de estabilidad del sistema de 9 barras
extraıdo de [17], comparandola con los resultados presentados en tal libro de texto, y con
la respuesta del software comercial Neplan 5.24.
Posteriormente, se desarrollo otro programa en Matlab, llamado SAIMS por sus siglas
en ingles Synchronous And Induction Machine Stability, que basado en el algoritmo de
SMS para la resolucion del caso sincronico incluye la evaluacion de la velocidad de los
generadores de induccion. Su evaluacion se realizo en el sistema de 9 barras mencionado
anteriormente, con la sustitucion del generador sincronico de menor potencia por un
generador de induccion y su comparacion se realizo con el software comercial DiGSILENT
PowerFactory.

36
Para el estudio se utilizo el modelo clasico de las maquinas sincronicas, gracias a su
simplicidad computacional, la cual permite representar el comportamiento electrico tran-
sitorio como una fuente de voltaje de magnitud fija y su reactancia transitoria, y el modelo
de primer orden de la maquina de induccion, dado que como se menciono en el Capıtulo
2, este modelo es suficiente para evaluar el comportamiento mecanico de la maquina en
este tipo de fenomenos electromecanicos. La descripcion detallada del sistema y los datos
empleados por el programa se encuentran en el Apendice B.
4.2 Programa computacional desarrollado en Matlab para el estudio de esta-
bilidad clasica de angulo en sistemas electricos de potencia
4.2.1. Flujograma
En la Figura 4.1 se muestra el flujograma de SMS para el estudio clasico de estabilidad
de maquinas sincronicas:
El proceso Lectura de datos realiza la identificacion de los elementos presentes en el
sistema segun la informacion contenida en las matrices de datos del programa, cuyo for-
mato se encuentra en el Apendice B. Su salida es las matrices necesarias para correr el
flujo de carga inicial del sistema con el uso de la extension Matpower.
Posteriormente, en Armado de matriz de flujo de carga, las matrices de entrada al flujo
de carga se introducen en el archivo estructurado de Matpower.
En Inicializacion se corre el flujo de carga prefalla del sistema, y se emplean las ten-
siones obtenidas en las barras y el flujo de potencia por las lıneas para la obtencion de la
tension interna de las maquinas sincronicas, el valor del angulo inicial de posicionamiento
de sus rotores y la modelacion como impedancia constante de las cargas conectadas al
sistema.
Luego, en Armado de la Ybus se construye la matriz de admitancia nodal del sistema,
el cual incluye las reactancias transitorias de las maquinas sincronicas, de manera que las
barras en las que se encuentran conectadas pueden verse como fuentes ideales.

37
Figura 4.1: Flujograma del programa SMS
Posteriormente, en Dimensionamiento, se crean las matrices en las que se van a alma-
cenar los valores obtenidos de los angulos de las maquinas sincronicas, sus velocidades,
y el voltaje de todas las barras del sistema acorde al numero de pasos definidos con el
tiempo de simulacion y el paso de integracion definido en el archivo de datos de entrada
del sistema.
El proceso de integracion de la ecuacion de oscilacion del caso multimaquinas descrito
en [17], se realiza cıclicamente evaluando el instante de tiempo de entrada a la integracion.
En el caso de la Inicializacion parametros prefalla, la matriz de impedancia nodal a
emplear es la matriz de impedancia sin perturbacion. Parte del proceso consiste en la
reduccion de Kron de la matriz de admitancia nodal del estado correspondiente, que es
38
la matriz de entrada del metodo numerico que realiza la integracion de las ecuaciones
diferenciales de las maquinas, en conjunto con el vector que contiene el paso previo de
las variables de estado de las maquinas sincronicas: posicion angular de los rotores y su
velocidad. El metodo numerico empleado para la integracion es Runge Kutta de orden 4,
el cual se encuentra documentado en [18].
El proceso de integracion tambien incluye la expansion de Kron, la cual permite el
calculo del voltaje en las barras del sistema para cada paso.
En los procesos de Inicializacion parametros falla e Inicializacion de parametros post-
falla se obtienen las matrices de admitancia nodal correspondiente para cada caso. En el
caso de la falla, el programa solo calcula cortocircuitos trifasicos en barra o cercanos a
ella, por lo que la matriz de admitancia nodal en falla se obtiene al eliminar de la matriz
inicial la fila y columna correspondiente a la barra fallada. En el caso postfalla, el despeje
que calcula el programa es el despeje de la lınea donde se encuentra la barra fallada, y se
obtiene al eliminar de la Ybus la impedancia correspondiente a la lınea que se abre en las
posiciones convenientes.
Una vez terminado el ciclo de integracion, el Armado de la matriz de resultado realiza
el calculo correspondiente para referenciar los angulos de las maquinas sincronicas con
respecto a la maquina sincronica de mayor inercia del sistema.
Finalmente, se grafican los resultados obtenidos en Graficar.
4.2.2. Ejemplo de estudio de estabilidad clasica de angulo de sistemas electri-
cos de potencia empleando SMS
La evaluacion de la respuesta de SMS se obtuvo del calculo del avance de los angulos de
las maquinas sincronicas respecto al angulo de la maquina con mayor inercia del sistema
descrito en [17]. Al igual que en el caso del libro, el sistema es sometido a una falla
trifasica solida cercana a la barra 7, con despeje por apertura de la lınea 5-7 a los 5
ciclos de ocurrida la falla. Los datos suministrados al programa en el formato de entrada
al mismo se presentan en el Apendice B. La comprobacion del resultado obtenido se
realizo con el resultado expuesto en dicho libro y en la simulacion del mismo caso en el
software comercial Neplan 5.24. A continuacion se muestra el resultado obtenido por el
programa y en la simulacion en Neplan.

39
Figura 4.2: Angulo de las maquinas sincronicas en SMS
Figura 4.3: Angulo de las maquinas sincronicas en Neplan
De las Figuras 4.2 y 4.3 se puede observar que la metodologıa seguida para la resolucion
del problema de estabilidad clasica en el programa desarrollado es la correcta, dado que
la respuesta tanto del programa, como Neplan corresponden con lo expuesto en el libro y

40
presentado en el Apendice B.
4.3 Programa computacional desarrollado en Matlab para el estudio de esta-
bilidad clasica de angulo de los generadores sincronicos y estabilidad de
velocidad de los generadores de induccion
4.3.1. Flujograma
En las Figuras 4.4 y 4.5 se muestra el algoritmo propuesto para el calculo del avance de
los angulos de las maquinas sincronicas utilizado en SAIMS, correspondiente a un estudio
clasico de estabilidad, con la inclusion del calculo de la velocidad de las maquinas de
induccion para la evaluacion de su estabilidad.
Al inicio del programa, el proceso de Lectura de datos realiza la carga de las matrices
contenidas en el archivo de datos del programa, cuyo formato y ejemplo se muestran en
el Apendice B.
Posterior a la carga de los datos se procede a la Inicializacion del sistema electrico, la
cual es diferente a la de SMS debido a la inclusion de la maquina de induccion en el sistema.
Esta inicializacion tiene como objetivo el hallazgo de un punto de operacion del sistema
electrico que corresponda con un punto de operacion de la maquina de induccion. Es decir,
conseguir un punto de operacion que tras la inyeccion de potencia activa y consumo de
potencia reactiva de la maquina a una determinada tension en sus terminales, corresponda
a la misma tension en la barra como respuesta del sistema en la corrida del flujo de carga.
Para ello, se realizo un proceso iterativo que emplea el punto de operacion de potencia
activa inyectada al sistema, un voltaje supuesto en terminales y los parametros del modelo
de la maquina en regimen permanente para evaluar la ecuacion 2.16 hasta la obtencion de
un deslizamiento capaz de inyectar esa potencia activa a esa tension inicialmente supuesta.

41
Figura 4.4: Flujograma del programa SAIMS - Parte I

42
Figura 4.5: Flujograma del programa SAIMS - Parte II
Una vez obtenido el deslizamiento, se calcula la potencia reactiva consumida por la
maquina con la ecuacion 2.18. Este punto de operacion de potencia activa y reactiva de la
maquina es introducida en el archivo estructurado de datos de Matpower, especificandose

43
como una carga que consume potencia activa negativa y potencia reactiva positiva. Pos-
teriormente, se corre el flujo de carga del sistema y se compara el valor de la tension en
terminales de la maquina. Si este valor coincide con el valor supuesto de la tension, se
almacena el deslizamiento y el flujo de carga como deslizamiento inicial de la maquina y
punto de operacion prefalla del sistema respectivamente; en caso contrario se supone el
valor de la tension arrojado por el flujo de carga como nuevo valor supuesto en terminales
de la maquina y se repite el calculo hasta encontrar tal coincidencia en la tension.
Una vez inicializado el sistema, en Inicializacion maquinas sincronicas se calcula el
valor de la tension interna de las maquinas sincronicas a partir del flujo de carga inicial,
considerandose la fase de tal tension interna como el angulo inicial de posicionamiento del
rotor.
Al igual que en el programa anterior, en Modelacion de las cargas conectadas al sistema
como impedancia constante se calcula el valor de la impedancia que modela las cargas a
partir de los datos obtenidos del flujo de carga.
En Armado de la Ybus se hace al igual que en el caso anterior, considerando la inclusion
de la reactancia transitoria de las maquinas sincronicas dentro de la misma, con el fin de
dejar estas como fuentes ideales conectadas al sistema.
En Inicializacion de los voltajes de las barras, se definen las tensiones en las barras
considerando el valor de las tensiones internas de las maquinas sincronicas como la tension
de sus respectivas barras de conexion.
A partir de los voltajes definidos, en Inicializacion de las maquinas de induccion se
toma el voltaje de las barras de conexion de las maquinas de induccion y se calcula el
voltaje equivalente de la maquina definido en la ecuacion 2.12 y la impedancia equivalente
de la maquina definida en la ecuacion 2.13.
Posteriormente en Inicializacion de la potencia mecanica de las maquinas sincronicas,
debido a que en la prefalla la maquina se encuentra balanceada en lo que respecta a la
potencia electrica de salida y la potencia mecanica de su accionamiento, se toma el valor
de potencia activa de salida de la maquina en el flujo de carga inicial como su potencia
mecanica.
En Inicializacion del torque mecanico de las maquinas de induccion, se calcula cual es
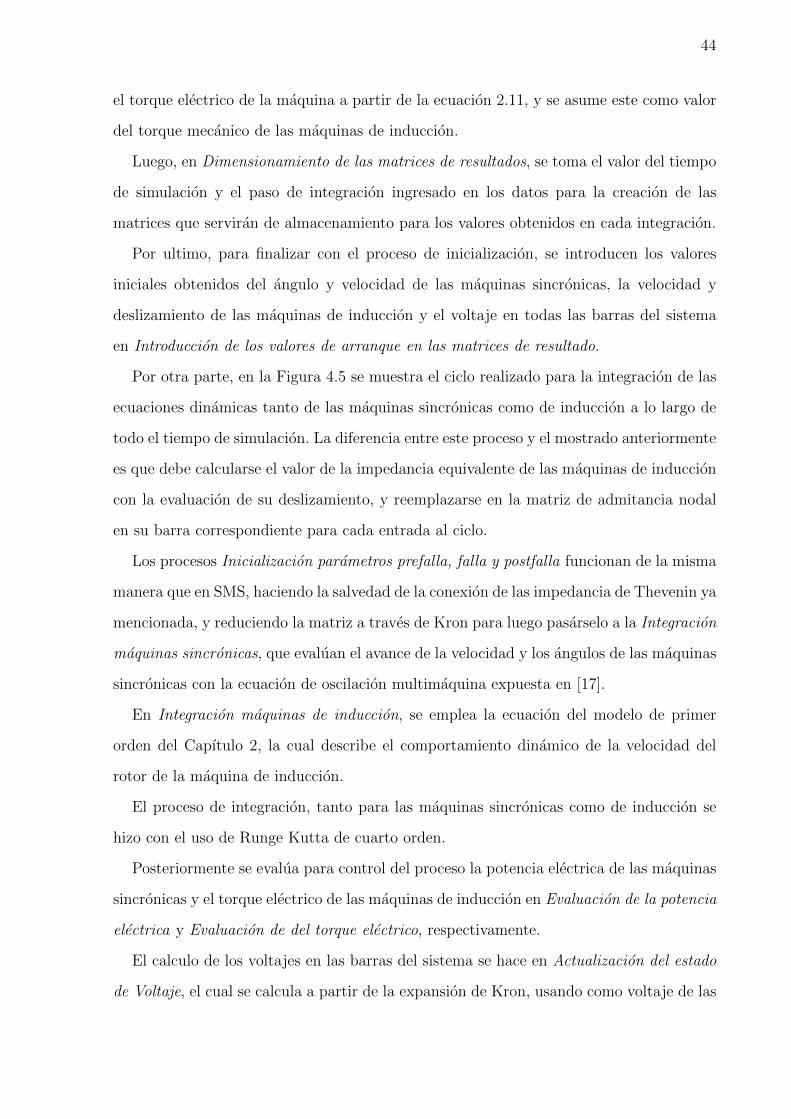
44
el torque electrico de la maquina a partir de la ecuacion 2.11, y se asume este como valor
del torque mecanico de las maquinas de induccion.
Luego, en Dimensionamiento de las matrices de resultados, se toma el valor del tiempo
de simulacion y el paso de integracion ingresado en los datos para la creacion de las
matrices que serviran de almacenamiento para los valores obtenidos en cada integracion.
Por ultimo, para finalizar con el proceso de inicializacion, se introducen los valores
iniciales obtenidos del angulo y velocidad de las maquinas sincronicas, la velocidad y
deslizamiento de las maquinas de induccion y el voltaje en todas las barras del sistema
en Introduccion de los valores de arranque en las matrices de resultado.
Por otra parte, en la Figura 4.5 se muestra el ciclo realizado para la integracion de las
ecuaciones dinamicas tanto de las maquinas sincronicas como de induccion a lo largo de
todo el tiempo de simulacion. La diferencia entre este proceso y el mostrado anteriormente
es que debe calcularse el valor de la impedancia equivalente de las maquinas de induccion
con la evaluacion de su deslizamiento, y reemplazarse en la matriz de admitancia nodal
en su barra correspondiente para cada entrada al ciclo.
Los procesos Inicializacion parametros prefalla, falla y postfalla funcionan de la misma
manera que en SMS, haciendo la salvedad de la conexion de las impedancia de Thevenin ya
mencionada, y reduciendo la matriz a traves de Kron para luego pasarselo a la Integracion
maquinas sincronicas, que evaluan el avance de la velocidad y los angulos de las maquinas
sincronicas con la ecuacion de oscilacion multimaquina expuesta en [17].
En Integracion maquinas de induccion, se emplea la ecuacion del modelo de primer
orden del Capıtulo 2, la cual describe el comportamiento dinamico de la velocidad del
rotor de la maquina de induccion.
El proceso de integracion, tanto para las maquinas sincronicas como de induccion se
hizo con el uso de Runge Kutta de cuarto orden.
Posteriormente se evalua para control del proceso la potencia electrica de las maquinas
sincronicas y el torque electrico de las maquinas de induccion en Evaluacion de la potencia
electrica y Evaluacion de del torque electrico, respectivamente.
El calculo de los voltajes en las barras del sistema se hace en Actualizacion del estado
de Voltaje, el cual se calcula a partir de la expansion de Kron, usando como voltaje de las

45
tensiones el voltaje de la tension de las maquinas sincronicas considerando el avance de
la fase de su tension. Este paso es importante porque a partir la nueva tension en barra
del sistema, se calcula el nuevo voltaje equivalente de la maquina de induccion para el
calculo del torque electrico de la maquina del paso siguiente.
Para finalizar el proceso de integracion, en Almacenamiento de resultados se guarda el
avance de las variables tras la integracion.
Una vez culminado al proceso de integracion, se grafican los resultados obtenidos de
las variables en Graficar.
4.3.2. Ejemplo de estudio de estabilidad clasica de angulo de las maquinas
sincronicas y estabilidad de velocidad de las maquinas asıncronas em-
pleando SAIMS
Para la evaluacion de la respuesta de SAIMS se realizo la sustitucion del generador
3 del sistema de 9 barras por una maquina de induccion inyectando la misma potencia
activa, y colocando un capacitor que permita obtener la tension en barra del caso original.
Al igual que en el libro, el sistema es sometido a una falla trifasica solida cercana a la
barra 7, con despeje de apertura de la lınea 5-7 a los 5 ciclos de ocurrida la falla. El flujo
de carga prefalla, los datos de la maquina de induccion y demas datos suministrados al
programa se presentan en el Apendice B, junto con el formato de entrada al mismo.
En la Figura 4.6 se presenta el resultado obtenido de los angulos de los generadores sin-
cronicos referenciados de nuevo al generador 1, por ser el de mayor inercia, y la velocidad
de las maquinas durante 5 segundos de simulacion, tanto con el programa desarrollado,
como con PowerFactory:

46
(a)
´
Angulo de las maquinas sincronicas en SAIMS (b)
´
Angulo de las maquinas sincronicas en PowerFactory
(c) Velocidad de las maquinas en SAIMS (d) Velocidad de las maquinas en PowerFactory
Figura 4.6: Angulo de las maquinas sincronicas y velocidad de los generadores del sistemade 9 barras con generador de induccion
Adicionalmente se obtuvieron las potencias activas de los generadores sincronicos, el par
del generador de induccion y la tension en terminales de este como variables de evaluacion
de SAIMS, estas se muestran en la Figura 4.7:
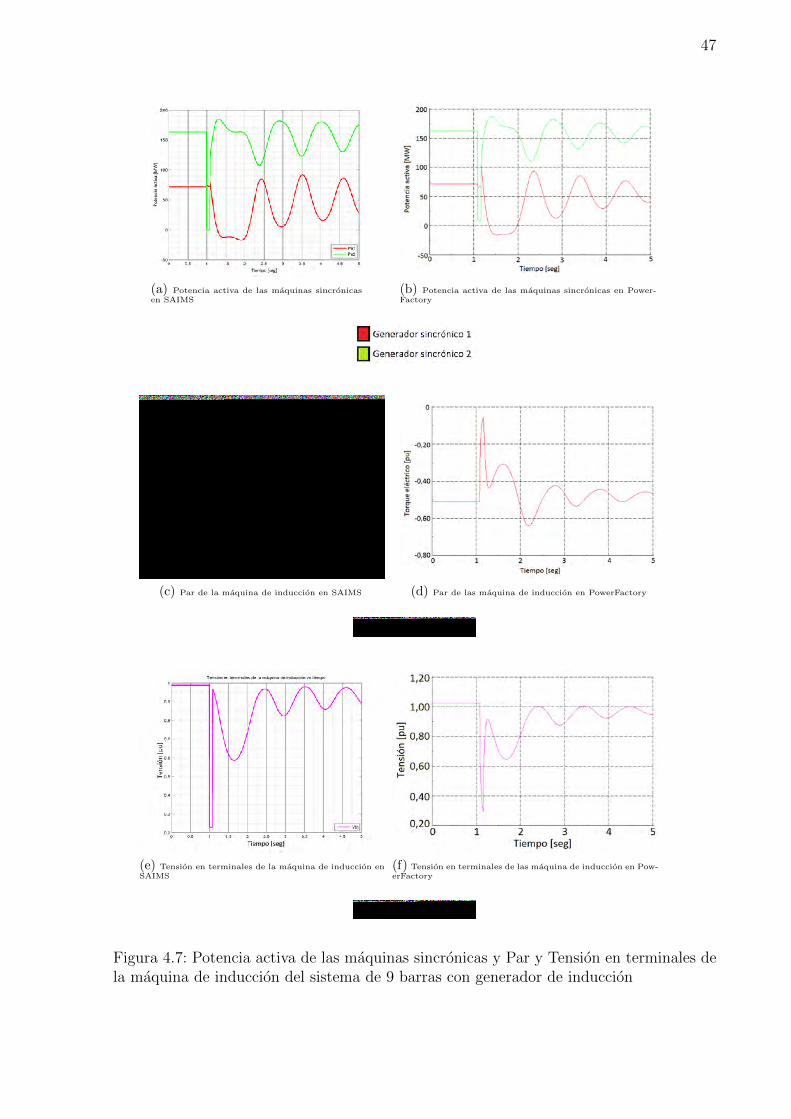
47
(a) Potencia activa de las maquinas sincronicas
en SAIMS
(b) Potencia activa de las maquinas sincronicas en Power-
Factory
(c) Par de la maquina de induccion en SAIMS (d) Par de las maquina de induccion en PowerFactory
(e) Tension en terminales de la maquina de induccion en
SAIMS
(f) Tension en terminales de las maquina de induccion en Pow-
erFactory
Figura 4.7: Potencia activa de las maquinas sincronicas y Par y Tension en terminales dela maquina de induccion del sistema de 9 barras con generador de induccion

48
Como es posible observar en las figuras, la respuesta de SAIMS se comporta como
PowerFactory, observando una diferencia en la velocidad del generador de induccion. Esto
se debe a que SAIMS no calcula las variaciones en la frecuencia debido a la falla, que se
evidencia en el cambio de las velocidades de las maquinas sincronicas, y por ello calcula
el deslizamiento necesario para evaluar su Par electrico usando la frecuencia sincronica
de la red. Sin embargo, se puede observar que para esta falla el sistema modificado de 9
barras arroja una respuesta estable en ambos programas.

CAPITULO 5
ANALISIS DE ESTABILIDAD ANTE LA INCORPORACION DE
GENERACION ASINCRONA EN UNA REPRESENTACION
ACADEMICA DEL SISTEMA ELECTRICO DE PARAGUANA
5.1 Generalidades
Se realizo un estudio de estabilidad transitoria en un ejemplo academico del sistema
electrico del Estado Falcon. Dos de los tres centros de generacion sincronica del Estado
(Punto Fijo I y Coro II) fueron concentrados en equivalentes multimaquinas. El sistema
consta de tres unidades generadoras en la Penınsula, considerando operativas dos unidades
del centro de generacion Josefa Camejo y un equivalente multimaquinas de 7 generadores
en el centro de generacion Punto Fijo I. El resto de las generacion sincronica corresponde
con un centro de generacion ubicado al sur del Estado en la subestacion Coro II y una
unidad operativa en Planta Centro, para un total de 5 maquinas sincronicas. Se incluyo un
equivalente del Sistema Electrico Nacional a partir de la barra Planta Centro 230KV. Los
resultados obtenidos del flujo de carga se muestran en el Apendice C
Se realizo la simulacion de tres fallas trifasicas en tres escenarios: a) sin parque eolico;
b) con parque eolico de aerogeneradores de velocidad fija con generador de induccion, y
c) con parque eolico de aerogeneradores de velocidad variable con generador de induccion
doblemente alimentado. Para todos los escenarios se utilizo el modelo subtransitorio de
las maquinas sincronicas, el modelo de 5to orden de la maquina de induccion y las cargas
fueron modeladas como impedancia constante. La descripcion detallada del sistema se
encuentra en el Apendice C.
Los resultados fueron obtenidos de dos casos principales: a) el sistema electrico de la
Penınsula de Paraguana acoplado al Sistema Electrico Nacional a traves de una lınea

50
de transmision en 115 KV correspondiente al tramo Punto Fijo II - El Isiro, toman-
do como barra slack Planta Centro 230 KV; b) el sistema electrico de la Penınsula de
Paraguana opera de forma aislada, tomando como barra slack la barra de conexion de la
unidad 1 de Josefa Camejo.
En el estudio realizado se observo el efecto de incluir un parque eolico de 50 MW en
la respuesta dinamica de los angulos de las maquinas sincronicas, los tiempos crıticos de
despeje y se analizo el comportamiento de los aerogeneradores tanto de velocidad fija como
variable ante las fallas simuladas. Adicionalmente se observo el efecto de distintos niveles
penetracion eolica en los tiempos crıticos de despeje para cuatro pasos de generacion
adicionales: 10 MW, 20 MW, 30 MW y 40 MW. Se realizo el estudio para dos valores de
constantes de inercia en los aerogeneradores con el fin de observar el efecto de la inercia
del acoplamiento mecanico de los aerogeneradores en su respuesta dinamica, ası como su
efecto en la respuesta del sistema de potencia.
Los colores que identifican los 5 generadores sincronicos del sistema, ası como la abre-
viatura empleada para su identificacion se muestran a continuacion en la Figura 5.1:
Figura 5.1: Codigo de colores de los generadores sincronicos
5.2 Caso acoplado
5.2.1. Cortocircuito trifasico en la lınea El Isiro - Planta Centro a 230KV
La falla trifasica es solida (Rf = 0⌦) y ocurre a una distancia de 0.95 en por unidad,
cercana a la barra slack. El tiempo de despeje es td = 80 mseg.
5.2.1.1. Efecto de la inclusion de un parque eolico en la respuesta dinamica
de los angulos de las maquinas sincronicas
En la Figura 5.2 se muestra el comportamiento de los angulos de las maquinas sin-
cronicas en respuesta al cortocircuito cercano a la barra slack. Se puede observar que a
pesar de que la inicializacion del sistema es la misma, la respuesta obtenida de PowerFac-

51
tory presenta un incremento de aproximadamente 3 grados con respecto a la respuesta
arrojada por Neplan. Esto se debe a la modelacion del sistema equivalente que hacen los
softwares. Por un lado, PowerFactory al modelar el sistema equivalente como una maquina
sincronica, fija la referencia respecto a la fase la tension interna de dicha maquina.
En el caso de Neplan, este modela el sistema equivalente como una fuente ideal, y fija
la referencia en la fase del voltaje en terminales.
A pesar que exista esta diferencia entre los angulos en condicion prefalla entre ambos
softwares, las formas de onda son muy similares, lo que permite comparar el efecto de
la inclusion del parque eolico en el sistema, tanto con aerogeneradores de velocidad fija
(simulado en PowerFactory) como con aerogeneradores de velocidad variable (simulado
en Neplan).
Una vez se conecta el parque eolico, los angulos de las maquinas sincronicas ubicadas
en la Penınsula se incrementan debido al aumento en la exportacion de potencia hacia
el sur a traves de la lınea de interconexion correspondiente al tramo Punto Fijo II - El
Isiro. En el caso de Coro II el incremento es menos pronunciado debido a la cercanıa con
la barra slack. La unidad de Planta Centro no sufre variaciones en su angulo debido a su
conexion directa con la barra slack.
Con respecto al incremento de los angulos de las maquinas sincronicas en regimen
permanente, tanto en el caso de bajas como altas constantes de inercia en los areogener-
adores, ası como el tipo el tipo de aerogenerador (velocidad fija o variable) no presenta
diferencias entre sı.

52
(a) Sin parque eolico en PowerFactory (b) Sin parque eolico en Neplan
(c) Con parque eolico de velocidad fija con H1 = 2 seg (d) Con parque eolico de velocidad variable con H1 = 2 seg
(e) Con parque eolico de velocidad fija con H2 = 9 seg (f) Con parque eolico de velocidad variable con H2 = 9 seg
Figura 5.2: Diferencias angulares de los rotores de los generadores sincronicos respecto ala barra slack

53
En regimen dinamico, para el caso de aerogeneradores de velocidad fija, un aumento
en la constante de inercia implica una disminucion en la frecuencia y amplitud de las
oscilaciones de los angulos de las maquinas sincronicas, a excepcion de la unidad de Planta
Centro, cuya oscilacion esta definida por la respuesta dinamica al cortocircuito del sistema
equivalente. Esto se debe al aumento en el momento de inercia presente en las masas
rotativas de los generadores asıncronos. Cuando el parque eolico es de aerogeneradores de
velocidad variable, las oscilaciones de los angulos de las maquinas sincronicas responden
casi igual, tanto para valores bajos como altos de constantes de inercia. Esto se debe a que
el sistema de control que poseen los generadores de induccion doblemente alimentados,
ejercen control directo sobre el par electromagnetico a traves de inyecciones de corriente
en el rotor, obedeciendo a una referencia de potencia activa correspondiente con el punto
de maxima extraccion de potencia para una velocidad de viento dada. Una vez fijado
ese punto de operacion en el control, este, independientemente de la inercia que posea el
sistema mecanico formado por la turbina eolica, la caja multiplicadora y el rotor de la
maquina de induccion, modifica el par para que las variaciones de velocidad de rotacion
del rotor en condicion de regimen transitorio sean mınimas.
(a) Planta Centro (b) Sistema equivalente
Figura 5.3: Potencia activa [MW]
Las formas de las oscilaciones de las maquinas sincronicas de la Penınsula presentan un

54
comportamiento claramente amortiguado, oscilando en su modo fundamental. Por otro
lado, las unidades de Planta Centro presentan oscilaciones de alta frecuencia. En la Figura
5.3 se muestra el avance transitorio de la potencia activa de la unidad de Planta Centro
y del sistema equivalente operando como slack. Como se menciono anteriormente, puede
observarse que la dinamica de las oscilaciones de la unidad de Planta Centro son fijadas
por el sistema equivalente operando como slack y no por su respuesta natural al sistema.
Mientras las maquinas sincronicas de la Penınsula oscilan en su modo fundamental,
Coro II presenta oscilaciones de mayor frecuencia desfasadas respecto a las unidades de
Planta Centro. Esta diferencia de fase se debe a que la inercia de Coro II es un poco mas
del doble de la que poseen las unidades de Planta Centro.
Una vez se amortiguan las oscilaciones de potencia en Planta Centro y en el equivalente
operando como slack, las oscilaciones angulares de Coro II se sincronizan con las oscila-
ciones angulares de las maquinas sincronicas conectadas en la Penınsula. En la Figura
5.4 se muestra la evolucion transitoria de la potencia activa de Coro II como respuesta al
cortocircuito.
Debido al incremento en los angulos de las maquinas sincronicas en condicion prefalla
como consecuencia de la inclusion del parque eolico, los tiempos crıticos de despeje dis-
minuyen. En las Figuras 5.5, 5.6 y 5.7 se muestran las oscilaciones de los angulos de las
maquinas para a) td = tcrıtico y b) td = tcrıtico + 1mseg.
Cuando se conecta el parque eolico, la posicion angular de los rotores de las maquinas
sincronicas aumenta respecto al caso sin parque. La disminucion de los tiempos crıticos
de despeje se debe a que el incremento de los angulos de las maquinas sincronicas de
la Penınsula en condicion prefalla, acerca el punto de operacion de las maquinas a su
correspondiente angulo crıtico de despeje.
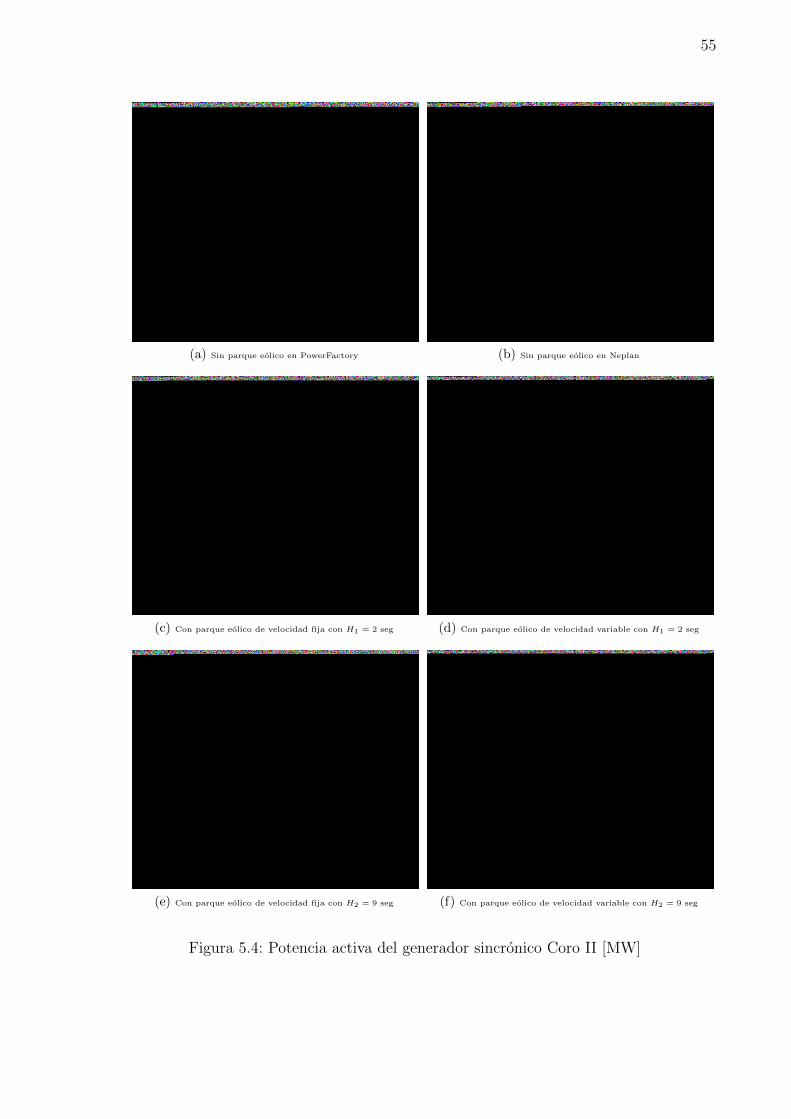
55
(a) Sin parque eolico en PowerFactory (b) Sin parque eolico en Neplan
(c) Con parque eolico de velocidad fija con H1 = 2 seg (d) Con parque eolico de velocidad variable con H1 = 2 seg
(e) Con parque eolico de velocidad fija con H2 = 9 seg (f) Con parque eolico de velocidad variable con H2 = 9 seg
Figura 5.4: Potencia activa del generador sincronico Coro II [MW]
56
(a) Sin parque eolico en PowerFactory con tiempo de
despeje td = 913 mseg
(b) Sin parque eolico en Powerfactory con tiempo de
despeje td = 914 mseg
(c) Sin parque eolico en Neplan con tiempo de despeje td = 913
mseg
(d) Sin parque eolico en Neplan con tiempo de despeje td = 914
mseg
Figura 5.5: Diferencias angulares de los rotores de los generadores sincronicos respecto ala barra slack sin parque eolico
Por otra parte, es posible notar que el tiempo crıtico de despeje es mayor cuando se
incrementa la constante de inercia de los aerogeneradores de velocidad fija. Debido a que
la inercia de las maquinas de induccion aumenta la inercia total de las masas rotativas
de la Penınsula, el tiempo necesario para alcanzar el angulo crıtico de despeje toma mas
tiempo que en el caso de constantes de inercia mas bajas.

57
(a) Con H1 = 2 seg y tiempo de despeje td = 504 mseg (b) Con H1 = 2 seg y tiempo de despejetd = 505 mseg
(c) Con H2 = 9 seg y tiempo de despejetd = 540 mseg (d) Con H2 = 9 seg y tiempo de despejetd = 541 mseg
Figura 5.6: Diferencias angulares de los rotores de los generadores sincronicos respecto ala barra slack con parque eolico de velocidad fija
En el caso de los aerogeneradores de velocidad variable, los tiempos crıticos de despeje
no presentan diferencias entre sı ante aumentos de la constante de inercia. Esto se debe a
que las variaciones de velocidad durante el regimen transitorio a diferentes constantes de
inercia son tan pequenas, que la respuesta de las oscilaciones de las maquinas sincronicas
no presenta variaciones sustanciales que afecten los tiempos crıticos de despeje.
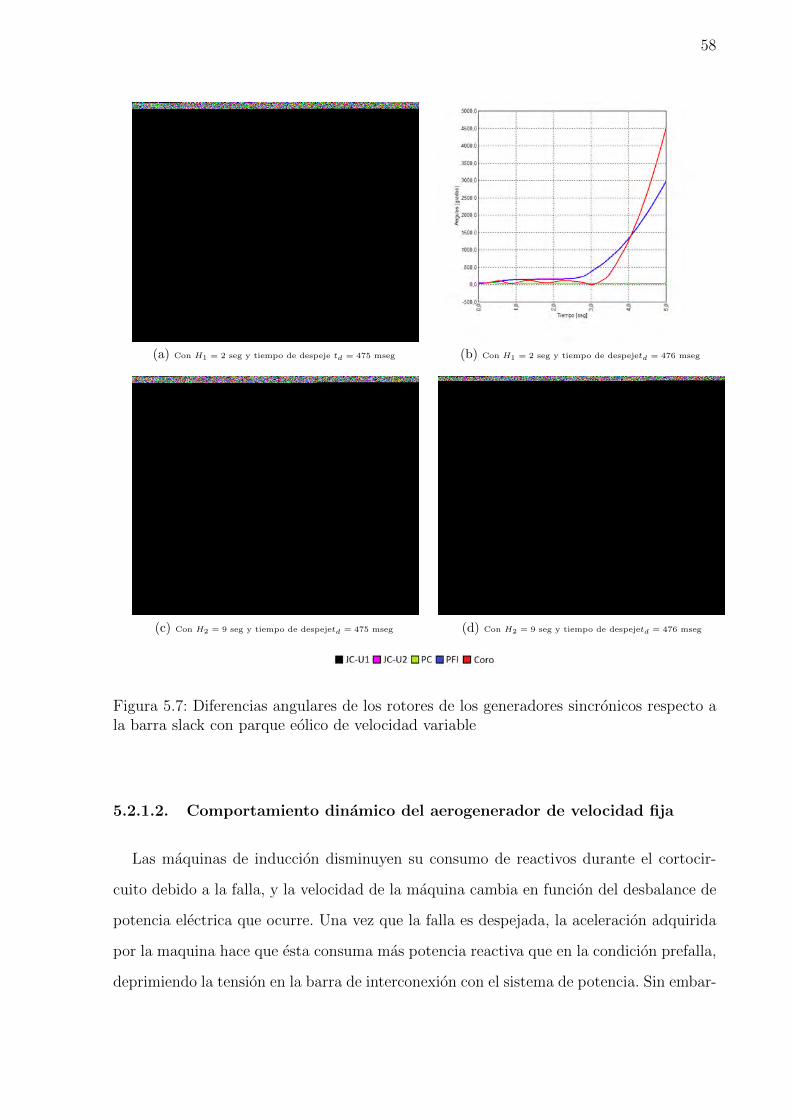
58
(a) Con H1 = 2 seg y tiempo de despeje td = 475 mseg (b) Con H1 = 2 seg y tiempo de despejetd = 476 mseg
(c) Con H2 = 9 seg y tiempo de despejetd = 475 mseg (d) Con H2 = 9 seg y tiempo de despejetd = 476 mseg
Figura 5.7: Diferencias angulares de los rotores de los generadores sincronicos respecto ala barra slack con parque eolico de velocidad variable
5.2.1.2. Comportamiento dinamico del aerogenerador de velocidad fija
Las maquinas de induccion disminuyen su consumo de reactivos durante el cortocir-
cuito debido a la falla, y la velocidad de la maquina cambia en funcion del desbalance de
potencia electrica que ocurre. Una vez que la falla es despejada, la aceleracion adquirida
por la maquina hace que esta consuma mas potencia reactiva que en la condicion prefalla,
deprimiendo la tension en la barra de interconexion con el sistema de potencia. Sin embar-

59
go, dada la lejanıa del parque eolico del lugar de ocurrencia de la falla, la contribucion del
parque al cortocircuito no ocasiona un incremento de la velocidad que lleve a la maquina
a un punto de operacion inestable por velocidad ni por caıda de tension en terminales.
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.8: Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg

60
(a) Velocidad rototica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.9: Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg
Por otra parte, una comparacion del comportamiento dinamico de los aerogeneradores
operando a diferentes constantes de inercia permite concluir que mientras mayor es la
constante de inercia menor es la frecuencia de las oscilaciones de todas las variables
observadas en el aerogenerador. En el caso en que la constante de inercia es mayor, al
ser mas difıcil para las masas rotativas acelerarse, el consumo de reactivos una vez que es
despejada la falla es menor que en el caso de menor inercia, por lo que el restablecimiento
del voltaje en terminales de la maquina y su velocidad es mas amortiguado.
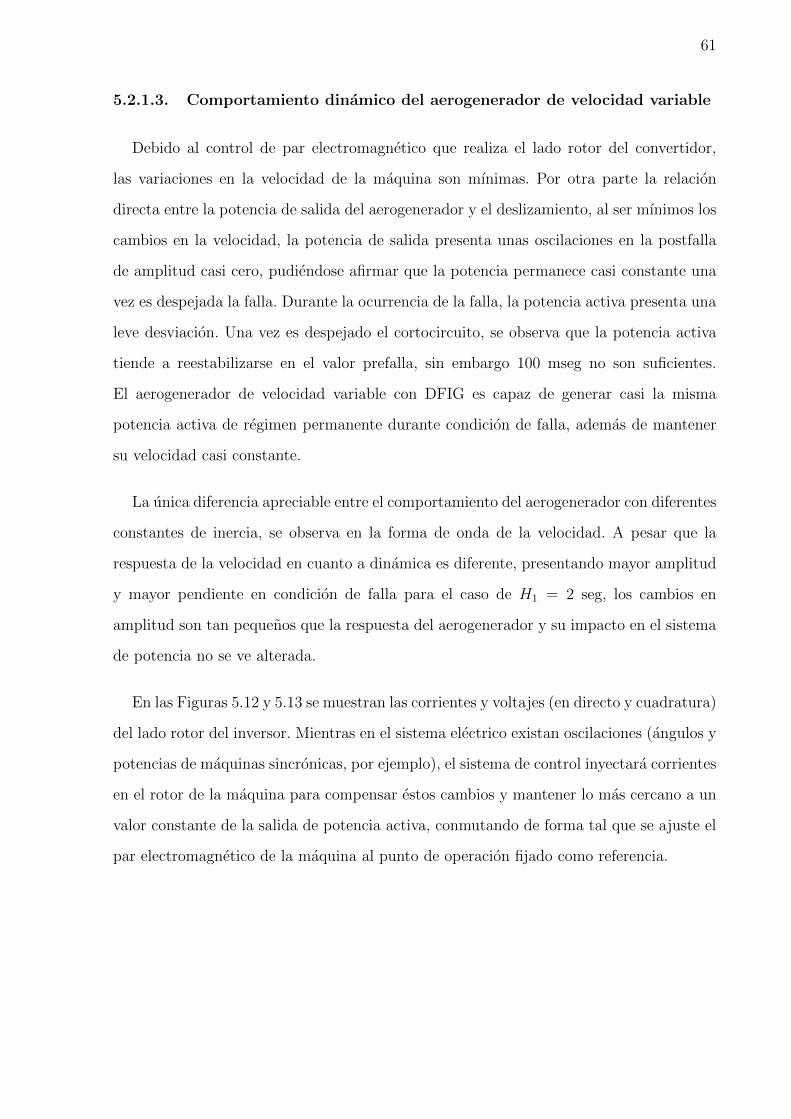
61
5.2.1.3. Comportamiento dinamico del aerogenerador de velocidad variable
Debido al control de par electromagnetico que realiza el lado rotor del convertidor,
las variaciones en la velocidad de la maquina son mınimas. Por otra parte la relacion
directa entre la potencia de salida del aerogenerador y el deslizamiento, al ser mınimos los
cambios en la velocidad, la potencia de salida presenta unas oscilaciones en la postfalla
de amplitud casi cero, pudiendose afirmar que la potencia permanece casi constante una
vez es despejada la falla. Durante la ocurrencia de la falla, la potencia activa presenta una
leve desviacion. Una vez es despejado el cortocircuito, se observa que la potencia activa
tiende a reestabilizarse en el valor prefalla, sin embargo 100 mseg no son suficientes.
El aerogenerador de velocidad variable con DFIG es capaz de generar casi la misma
potencia activa de regimen permanente durante condicion de falla, ademas de mantener
su velocidad casi constante.
La unica diferencia apreciable entre el comportamiento del aerogenerador con diferentes
constantes de inercia, se observa en la forma de onda de la velocidad. A pesar que la
respuesta de la velocidad en cuanto a dinamica es diferente, presentando mayor amplitud
y mayor pendiente en condicion de falla para el caso de H1
= 2 seg, los cambios en
amplitud son tan pequenos que la respuesta del aerogenerador y su impacto en el sistema
de potencia no se ve alterada.
En las Figuras 5.12 y 5.13 se muestran las corrientes y voltajes (en directo y cuadratura)
del lado rotor del inversor. Mientras en el sistema electrico existan oscilaciones (angulos y
potencias de maquinas sincronicas, por ejemplo), el sistema de control inyectara corrientes
en el rotor de la maquina para compensar estos cambios y mantener lo mas cercano a un
valor constante de la salida de potencia activa, conmutando de forma tal que se ajuste el
par electromagnetico de la maquina al punto de operacion fijado como referencia.

62
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.10: Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg
Estos cambios en los valores de las variables del inversor estan ıntimamente ligados a
las oscilaciones del sistema de potencia y a como el DFIG mantiene su punto de operacion
ante las mismas.

63
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador
[MVAr]
Figura 5.11: Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg
Puede observarse que a diferentes valores de constante de inercia, la respuesta del
regulador es casi la misma, razon por la cual la respuesta dinamica del DFIG no varıa
sustancialmente acorde se aumenta la constante de inercia del acoplamiento mecanico
completo. La respuesta del sistema de control compensa las variaciones que impone en la
maquina de induccion la respuesta dinamica del sistema.

64
Figura 5.12: Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable conH
1
= 2 seg
Figura 5.13: Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable conH
2
= 9 seg
5.2.2. Cortocircuito trifasico en la lınea Judibana - Punto Fijo II a 115 KV
La falla trifasica es a traves de una resistencia de falla (Rf = 14.41⌦) y ocurre a mitad
de la lınea de transmision. A diferencia de la falla anterior, esta es cercana al punto de

65
interconexion del parque eolico con el sistema de potencia. El tiempo de despeje es td = 80
mseg.
5.2.2.1. Efecto de la inclusion de un parque eolico en la respuesta dinamica
de los angulos de las maquinas sincronicas
En la Figura 5.14 se muestra el comportamiento de los angulos de las maquinas sin-
cronicas en respuesta al cortocircuito cercano a la barra de interconexion del parque eolico.
Debido a que la falla trifasica no es solida, la presencia de una resistencia de falla pro-
duce un incremento tanto en la salida de potencia en las maquinas sincronicas, como de
los aerogeneradores de velocidad fija con el fin de alimentar el cortocircuito, tal como se
muestra en las Figuras 5.15, 5.19 y 5.20. Esto explica que la pendiente de sus angulos
una vez que ocurre la falla sea negativa, gracias al desbalance negativo entre la potencia
mecanica de accionamiento de las maquinas y su potencia electrica de salida.
Al igual que en el caso anterior, una vez se conecta el parque eolico, los angulos de las
maquinas sincronicas ubicadas en la Penınsula se incrementan debido al aumento en la
exportacion de potencia hacia el sur a traves de la lınea de interconexion correspondiente
al tramo Punto Fijo II - El Isiro. Igualmente se puede notar el efecto de las constantes
de inercia de los aerogeneradores de velocidad fija en las oscilaciones de las maquinas de
la Penınsula, ası como tampoco se evidencia ningun cambio en el comportamiento de las
maquinas sincronicas en el caso del sistema con aerogeneradores de velocidad variable.
Debido a que la falla es lejana a la barra slack, todas las maquinas sincronicas oscilan
a la misma frecuencia, puesto que no es el equivalente conectado en la barra quien define
la dinamica de las oscilaciones en las unidades fuera de la Penınsula.
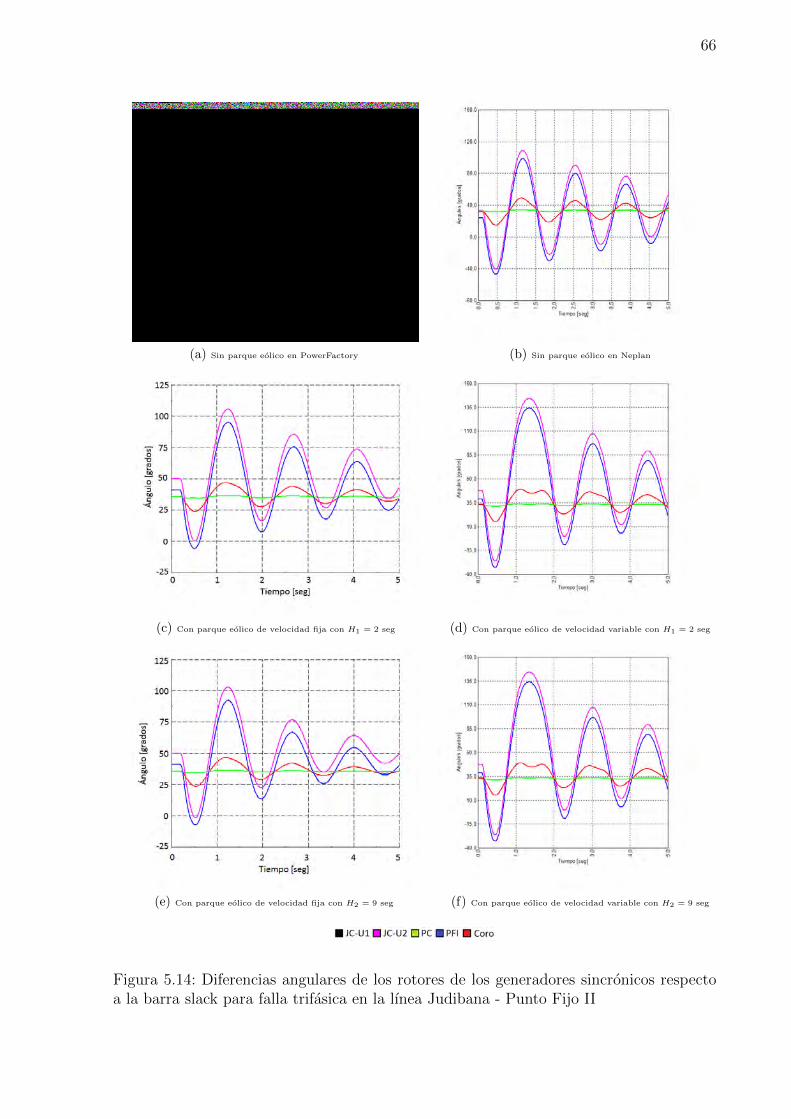
66
(a) Sin parque eolico en PowerFactory (b) Sin parque eolico en Neplan
(c) Con parque eolico de velocidad fija con H1 = 2 seg (d) Con parque eolico de velocidad variable con H1 = 2 seg
(e) Con parque eolico de velocidad fija con H2 = 9 seg (f) Con parque eolico de velocidad variable con H2 = 9 seg
Figura 5.14: Diferencias angulares de los rotores de los generadores sincronicos respectoa la barra slack para falla trifasica en la lınea Judibana - Punto Fijo II

67
(a) Sin parque eolico en Powerfactory (b) Sin parque eolico en Neplan
(c) Con parque eolico con aerogeneradores de velocidad fija con
H1 = 2 seg
(d) Con parque eolico con aerogeneradores de velocidad variable
con H1 = 2 seg
(e) Con parque eolico con aerogeneradores de velocidad fija con
H2 = 9 seg
(f) Con parque eolico con aerogeneradores de velocidad fija con
H2 = 9 seg
Figura 5.15: Evolucion transitoria de la Potencia activa de las maquinas sincronicas [MW]

68
(a) Sin parque eolico en PowerFactory con tiempo de despeje td =
211 mseg
(b) Sin parque eolico en Powerfactory con tiempo de despeje td =
212 mseg
(c) Sin parque eolico en Neplan con tiempo de despeje td = mseg (d) Sin parque eolico en Neplan con tiempo de despeje td = 1071 mseg
Figura 5.16: Diferencias angulares de los rotores de los generadores sincronicos respectoa la barra slack sin parque eolico
Al igual que en la falla anterior, debido al incremento en los angulos de las maquinas
sincronicas en condicion prefalla como consecuencia de la inclusion del parque eolico, los
tiempos crıticos de despeje disminuyen. En las Figuras 5.16, 5.17 y 5.18 se muestran las
oscilaciones de los angulos de las maquinas para a) td = tcrıtico y b) td = tcrıtico + 1mseg.
69
(a) Con H1 = 2 seg y tiempo de despeje td = 223 mseg (b) Con H1 = 2 seg y tiempo de despejetd = 224 mseg
(c) Con H2 = 9 seg y tiempo de despejetd = 232 mseg (d) Con H2 = 9 seg y tiempo de despejetd = 233 mseg
Figura 5.17: Diferencias angulares de los rotores de los generadores sincronicos respectoa la barra slack con parque eolico de velocidad fija
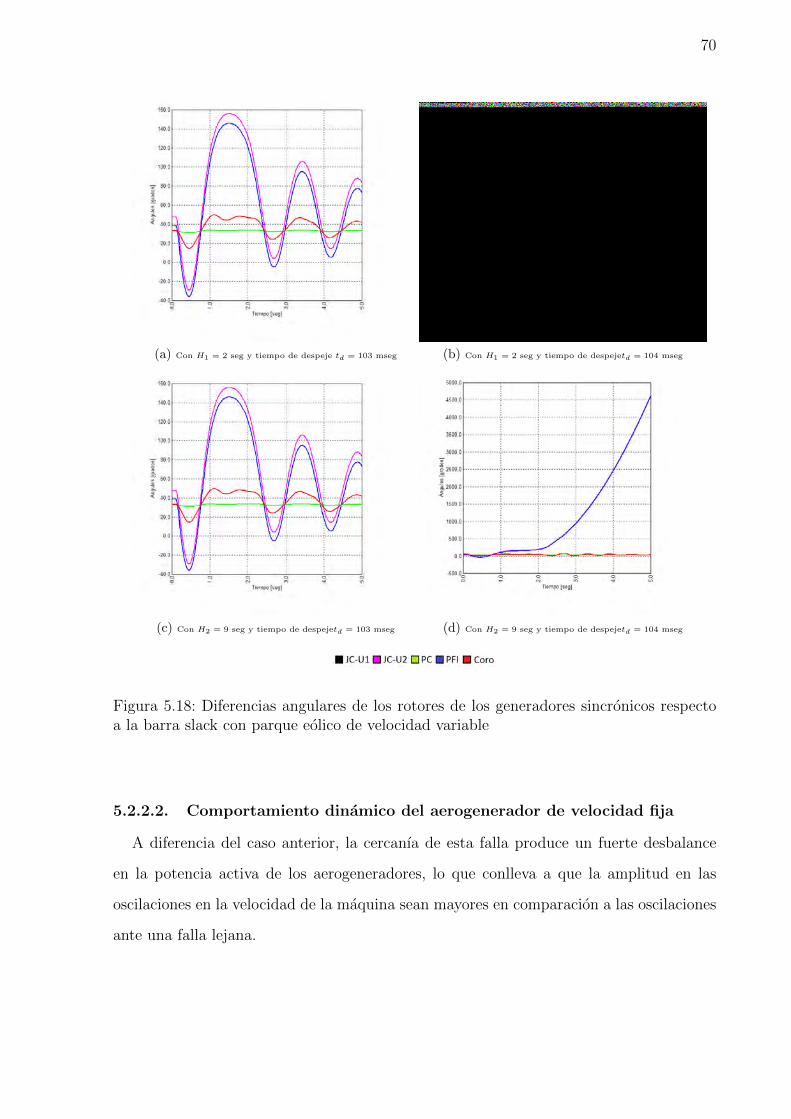
70
(a) Con H1 = 2 seg y tiempo de despeje td = 103 mseg (b) Con H1 = 2 seg y tiempo de despejetd = 104 mseg
(c) Con H2 = 9 seg y tiempo de despejetd = 103 mseg (d) Con H2 = 9 seg y tiempo de despejetd = 104 mseg
Figura 5.18: Diferencias angulares de los rotores de los generadores sincronicos respectoa la barra slack con parque eolico de velocidad variable
5.2.2.2. Comportamiento dinamico del aerogenerador de velocidad fija
A diferencia del caso anterior, la cercanıa de esta falla produce un fuerte desbalance
en la potencia activa de los aerogeneradores, lo que conlleva a que la amplitud en las
oscilaciones en la velocidad de la maquina sean mayores en comparacion a las oscilaciones
ante una falla lejana.

71
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.19: Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg
Es por esto que se observa un aumento considerable en el consumo de potencia re-
activa en la maquina de induccion en el momento que es despejada la falla, lo que trae
como consecuencia una depresion en el voltaje en terminales de la maquina mucho mayor
respecto al caso ante falla lejana al parque.

72
(a) Velocidad rototica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.20: Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg
El efecto de aumentar la constante de inercia en el aerogenerador, implica un mayor
amortiguamiento en las oscilaciones de la velocidad, ası como un cambio en la frecuencia
del resto de las variables.
5.2.2.3. Comportamiento dinamico del aerogenerador de velocidad variable
A diferencia del caso con falla solida, en el instante que ocurre la falla el DFIG y el
FSIG entregan potencia al cortocircuito. Sin embargo, durante el cortocircuito el sistema
de control frena este fenomeno y ajusta la entrega de potencia a un valor cercano al
prefalla, aunque este valor sea de menor amplitud que en el caso de falla lejana.

73
(a) Velocidad rototica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.21: Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg
A pesar que la potencia durante el cortocircuito es menor que en el caso de falla lejana,
las variaciones de velocidad son mınimas, razon por la cual la respuesta dinamica del
resto de las variables del DFIG, ası como del efecto sobre las maquinas sincronicas es
practicamente el mismo para los dos valores de constantes de inercia que se simularon.
En la Figuras 5.23 y 5.24 se muestran las corrientes y voltajes (en directo y cuadratura)
del inversor.

74
(a) Velocidad rototica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.22: Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg
Las componentes directa como en cuadratura del voltaje se encuentran en contrafase
con sus respectivas componentes de las corrientes. Esto se debe a que el convertidor ha
de realizar inyecciones de corriente que induzcan un par electromagnetico tal que frene
el rotor de la maquina cuando tienda a acelerarse y lo acelere cuando tienda a frenarse,
de forma tal que realice la compensacion necesaria para mantener la velocidad de giro
de la maquina lo mas constante posible y ası, la potencia entregada lo mas cercana a la
referencia fijada al sistema de control.
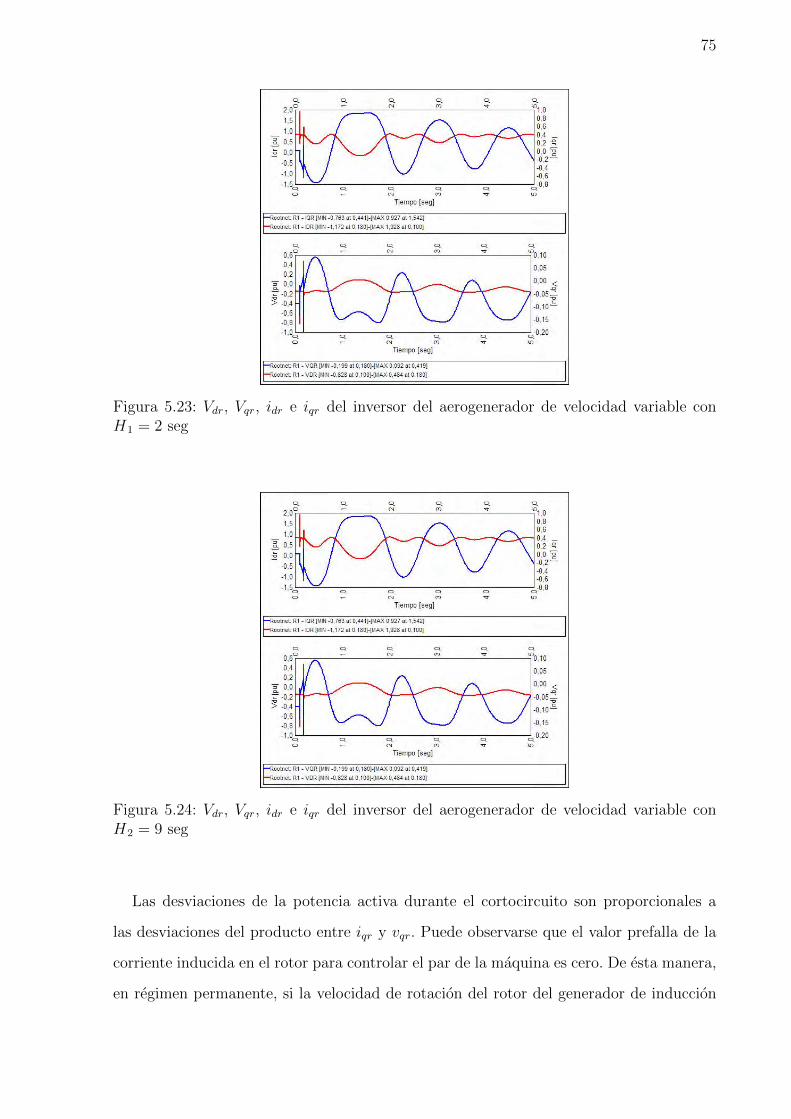
75
Figura 5.23: Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable conH
1
= 2 seg
Figura 5.24: Vdr, Vqr, idr e iqr del inversor del aerogenerador de velocidad variable conH
2
= 9 seg
Las desviaciones de la potencia activa durante el cortocircuito son proporcionales a
las desviaciones del producto entre iqr y vqr. Puede observarse que el valor prefalla de la
corriente inducida en el rotor para controlar el par de la maquina es cero. De esta manera,
en regimen permanente, si la velocidad de rotacion del rotor del generador de induccion

76
no varıa, la entrega de potencia coincide con la referencia y en consecuencia, el convertidor
no inyecta corrientes.
Con respecto al control que realiza el inversor sobre el intercambio de reactivos con el
sistema, para mantener el factor de potencia en el valor deseado, la accion de control ha
de ser perenne, ya sea en regimen estacionario como en regimen transitorio. El producto
de idr y vdr jamas sera cero, tal y como se muestra en las Figuras 5.23 y 5.24, ya que es
necesario en todo momento mantener el factor de potencia fijado al control a traves del
valor de Qref.
5.2.3. Tiempos crıticos de despeje obtenidos de las simulaciones
En la Tabla 5.1 se muestran los tiempos crıticos de despeje obtenidos de la falla en la
lınea de transmision El Isiro - Planta Centro:
Tabla 5.1: Tiempos crıticos de despeje de la falla en la lınea El Isiro - Planta Centro paradistintos niveles de penetracion de generacion eolica
Potencia [MW] H1 = 2 seg H2 = 9 seg
0 813 ms 813 ms
10 690 ms 705 ms
20 596 ms 620 ms
30 521 ms 550 ms
40 458 ms 491 ms
50 404 ms 440 ms
(a) Parque con aerogeneradores de velocidad
fija
Potencia [MW] H1 = 2 seg H2 = 9 seg
0 813 ms 813 ms
10 668 ms 668 ms
20 571 ms 571 ms
30 495 ms 495 ms
40 431 ms 431 ms
50 375 ms 375 ms
(b) Parque con aerogeneradores de velocidad
variable
Para la falla en la lınea de transmision Judibana - Punto Fijo II se obtuvieron los
tiempos crıticos de despeje que se muestran a continuacion en la Tabla 5.2:

77
Tabla 5.2: Tiempos crıticos de despeje de la falla en la lınea Judibana - Punto Fijo II paradistintos niveles de penetracion de generacion eolica
Potencia [MW] H1 = 2 seg H2 = 9 seg
0 167 ms 167 ms
10 158 ms 160 ms
20 150 ms 153 ms
30 141 ms 146 ms
40 132 ms 139 ms
50 123 ms 132 ms
(a) Parque con aerogeneradores de velocidad
fija
Potencia [MW] H1 = 2 seg H2 = 9 seg
0 112 ms 112 ms
10 106 ms 106 ms
20 101 ms 101
30 95 ms 95 ms
40 89 ms 89 ms
50 83 ms 83 ms
(b) Parque con aerogeneradores de velocidad
variable
5.3 Caso desacoplado
La falla trifasica es a traves de una resistencia de falla (Rf = 9.825⌦) y ocurre a una
distancia de 0.95 en por unidad. A diferencia de la falla anterior, esta es cercana al punto
de conexion del parque eolico con el sistema de potencia. El tiempo de despeje es td = 80
mseg.
5.3.1. Efecto de la inclusion de un parque eolico en la respuesta dinamica de
los angulos de las maquinas sincronicas
En la Figura 5.25f se muestra el comportamiento de los angulos de las maquinas sin-
cronicas en respuesta al cortocircuito cercano a la barra de conexion del parque eolico,
esta vez operando en modo desacoplado. Al igual que en el caso acoplado, debido a que
la falla trifasica no es solida, la presencia de una resistencia de falla invierte el signo de
la potencia activa de las maquinas sincronicas durante el cortocircuito, como se muestra
en la Figura 5.26, lo que justifica la pendiente negativa en los angulos de las maquinas
sincronicas cuando ocurre la falla.
En el caso acoplado, el sistema equivalente operando como slack es quien se adaptaba
a la variacion en las potencias activas del sistema cuando se incluye el parque eolico. En
ese caso, la inclusion del parque eolico no alteraba la potencia generada por las maquinas
sincronicas ya que todas fueron fijadas para el flujo de carga prefalla en modo PV. En este

78
caso, por operar en modo desacoplado del resto del sistema, es necesario fijar una nueva
barra slack en un punto en la Penınsula. La nueva barra slack que se tomo corresponde
con la barra de conexion de unidad 1 de Josefa Camejo, razon por la cual al incluir el
parque, la potencia generada disminuye en la misma magnitud de la potencia que genera
el parque.
Ademas, ya que la potencia que genera la unidad 1 de Josefa Camejo disminuye en 50
MW cuando se incluye el parque eolico, su angulo de carga tambien disminuye por lo que
la referencia angular que impone operando en modo slack tambien varıa. La diferencia
angular presente entre la unidad 2 de Josefa Camejo y Punto Fijo I se mantiene luego que
se incluye el parque eolico dado que la potencia que entregan ambas maquinas no varıa
entre ambos escenarios.
No son notables oscilaciones de los angulos durante un lapso mayor de tiempo porque
todas las maquinas (incluyendo la referencia) estan oscilando a una misma amplitud y
frecuencia, la cual es menor a la frecuencia prefalla del sistema, gracias a que las inercias
de las maquinas sincronicas conectadas son practicamente iguales.
Puede observarse que una vez es incluido el parque eolico, las oscilaciones de velocidad
y potencia que presentan las maquinas sincronicas en el caso sin parque son asumidas
por los aerogeneradores, manteniendose la salida de potencia activa y la velocidad de las
maquinas practicamente sin oscilaciones una vez es despejada la falla. Esto se debe al
efecto que ejerce el incremento de las inercias cuando se incluye el parque, ademas de la
ausencia de sistemas de regulacion de velocidad y voltaje en las maquinas sincronicas.

79
(a) Sin parque eolico en PowerFactory (b) Sin parque eolico en Neplan
(c) Con parque eolico de velocidad fija con H1 = 2 seg (d) Con parque eolico de velocidad variable con H1 = 2 seg
(e) Con parque eolico de velocidad fija con H2 = 9 seg (f) Con parque eolico de velocidad variable con H2 = 9 seg
Figura 5.25: Diferencias angulares de los rotores de los generadores sincronicos respectoa la barra slack para falla trifasica en L6

80
(a) Sin parque eolico en Powerfactory (b) Sin parque eolico en Neplan
(c) Con parque eolico con aerogeneradores de velocidad fija con
H1 = 2 seg
(d) Con parque eolico con aerogeneradores de velocidad variable
con H1 = 2 seg
(e) Con parque eolico con aerogeneradores de velocidad fija con
H2 = 9 seg
(f) Con parque eolico con aerogeneradores de velocidad fija con
H2 = 9 seg
Figura 5.26: Evolucion transitoria de la potencia activa de las maquinas sincronicas [MW]

81
(a) Sin parque eolico en Powerfactory (b) Sin parque eolico en Neplan
(c) Con parque eolico con aerogeneradores de velocidad fija con
H1 = 2 seg
(d) Con parque eolico con aerogeneradores de velocidad variable
con H1 = 2 seg
(e) Con parque eolico con aerogeneradores de velocidad fija con
H2 = 9 seg
(f) Con parque eolico con aerogeneradores de velocidad variable
con H2 = 9 seg
Figura 5.27: Evolucion transitoria de la velocidad de las maquinas sincronicas [pu]

82
5.3.1.1. Comportamiento dinamico del aerogenerador de velocidad fija
El parque eolico se comporta de manera similar al caso acoplado durante el cortocir-
cuito. La ausencia de oscilaciones en la potencia activa y tension en terminales, se debe a
que las tres maquinas sincronicas operando en la Penınsula oscilan de manera similar en
amplitud y frecuencia, lo que implica que las diferencias angulares entre los angulos de
los rotores permanecen constantes.
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.28: Variables de estado del aerogenerador de velocidad fija para H1
= 2 seg
Por otro lado, ya que la inercia de la maquina tomada como slack y la del resto es
casi la misma, sumado a la ausencia de controles en las maquinas sincronicas, no existe
en el sistema algo que imponga o mantenga la frecuencia, por lo que, si se observa la
velocidad de los aerogeneradores, esta no regresa a su condicion prefalla (1 en pu), ya que

83
la frecuencia del sistema disminuye. Debido a la disminucion de frecuencia del sistema,
como se menciono anteriormente, el aerogenerador es capaz de entregar la misma potencia
en condicion postfalla, sin embargo operando a velocidad subsincronica.
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.29: Variables de estado del aerogenerador de velocidad fija para H2
= 9 seg
5.3.1.2. Comportamiento dinamico del aerogenerador de velocidad variable
A diferencia del comportamiento del sistema cuando opera con aerogeneradores de
velocidad fija, los cuales, como ya se dijo asumen las oscilaciones de potencia una vez se
despeja la falla, en el caso del sistema con aerogeneradores de velocidad variable, tales
oscilaciones no ocurren debido a la accion del sistema de control, el cual busca mantener
la potencia entregada por la maquina independientemente de lo que este ocurriendo en el

84
sistema de potencia. Es por eso que en este caso, tales oscilaciones postfalla son de nuevo
asumidas por las maquinas sincronicas pero de manera amortiguada gracias a la entrega
de potencia casi constante de los generadores doblemente alimentados antes, durante y
despues de la perturbacion.
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.30: Variables de estado del aerogenerador de velocidad variable para H1
= 2 seg
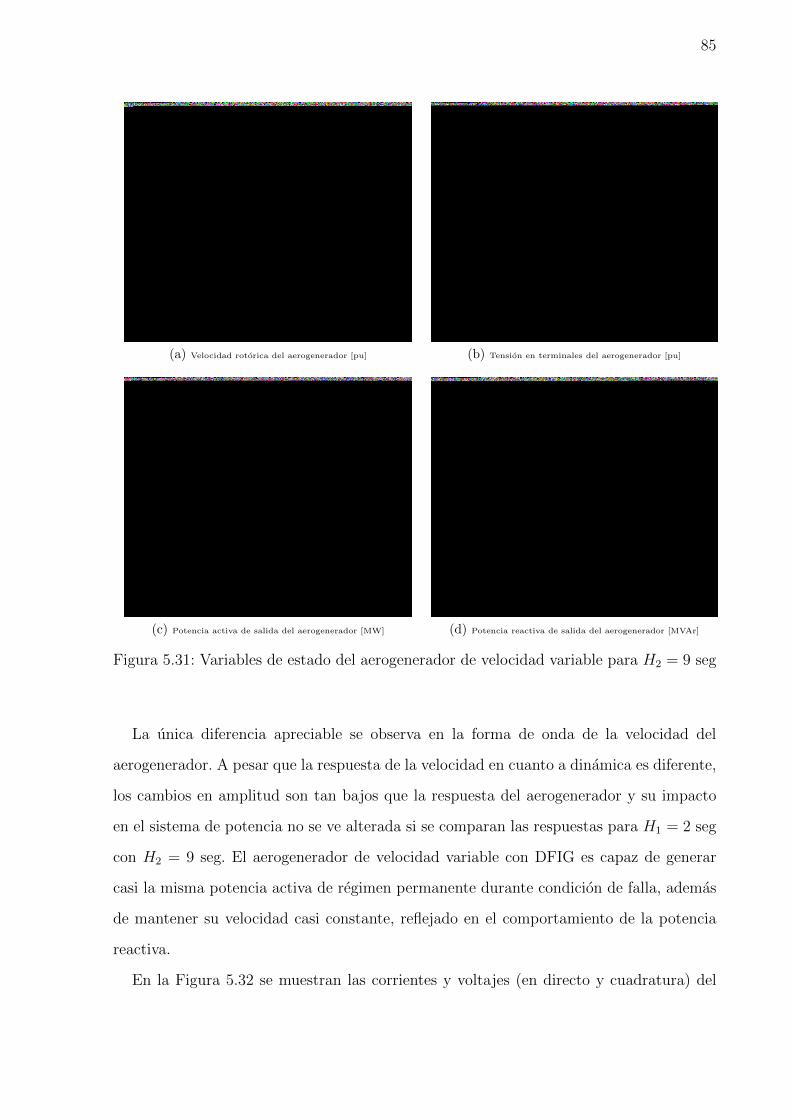
85
(a) Velocidad rotorica del aerogenerador [pu] (b) Tension en terminales del aerogenerador [pu]
(c) Potencia activa de salida del aerogenerador [MW] (d) Potencia reactiva de salida del aerogenerador [MVAr]
Figura 5.31: Variables de estado del aerogenerador de velocidad variable para H2
= 9 seg
La unica diferencia apreciable se observa en la forma de onda de la velocidad del
aerogenerador. A pesar que la respuesta de la velocidad en cuanto a dinamica es diferente,
los cambios en amplitud son tan bajos que la respuesta del aerogenerador y su impacto
en el sistema de potencia no se ve alterada si se comparan las respuestas para H1
= 2 seg
con H2
= 9 seg. El aerogenerador de velocidad variable con DFIG es capaz de generar
casi la misma potencia activa de regimen permanente durante condicion de falla, ademas
de mantener su velocidad casi constante, reflejado en el comportamiento de la potencia
reactiva.
En la Figura 5.32 se muestran las corrientes y voltajes (en directo y cuadratura) del

86
lado rotor del inversor.
(a) Aerogenerador de velocidad variable con H = 2 seg (b) Aerogenerador de velocidad variable con H = 9 seg
Figura 5.32: Vdr, Vqr, idr e iqr del inversor.
Puede observarse que a diferentes valores de constante de inercia, la respuesta del
regulador es casi la misma, razon por la cual la respuesta dinamica del DFIG no varıa
sustancialmente acorde se aumenta la constante de inercia del acoplamiento mecanico
completo. Debido que las oscilaciones angulares del sistema son amortiguadas rapida-
mente, la frecuencia de las senales de las corrientes inyectadas por el convertidor son muy
bajas, a diferencia de los casos acoplados en los que las oscilaciones de potencia y angulo
en el sistema son de mayor duracion.

CONCLUSIONES
El estudio de estabilidad de las maquinas de induccion esta ıntimamente ligado al
incremento de su velocidad o deslizamiento en condicion de falla.
El tiempo crıtico de despeje disminuye con la inclusion en el sistema de un parque
eolico.
En el caso de los aerogeneradores de velocidad fija, se presentan diferencias en el com-
portamiento dinamico del sistema y de los aerogeneradores para diversos valores de con-
stantes de inercia.
Cuando el parque esta conformado por aerogeneradores de velocidad fija, el efecto en
el aumento de los tiempos crıticos de despeje con el aumento de la inercia se hace mas
notable en la medida que aumenta el nivel de penetracion de generacion eolica.
En el caso de los aerogeneradores de velocidad variable, no se observan cambios en su
respuesta ni en la del sistema para diversos valores de constantes de inercia.
En ausencia de un sistema equivalente que imponga la frecuencia y restituya las veloci-
dades de las maquinas sincronicas una vez es despejada la falla, es necesaria la inclusion
de gobernadores de velocidad en las maquinas.
REFERENCIAS BIBLIOGRAFICAS
[1] Vladislav Akhmatov. Induction Generator for Wind Power. Multi-Science Publish-
ing, 2007.
[2] Janaka Ekanayake Phill Cartwright MIke Hughes. Olimpo Anaya-Lara, Nick Jenkins.
Wind Energy Generation Modelling and Control. John Wiley & Sons, 2009.
[3] Prabha Kundur. Power System Stability and Control. McGraw-Hill, 1994.
[4] Paul Krause Oleg Wasynczuk Scott Sudho↵. Analysis of Electric Machinery and
Drive Systems. Wiley Inter-Science, 2002.
[5] Abram Perdana. Wind Turbine Models for Power System Stability Studies. Chalmers
University of Technology, 2006.
[6] Pablo Ledesma Larrea. Analisis Dinamico de Sistemas Electricos con Generacion
Eolica. Universidad Carlos III de Madrid, 2001.
[7] Marco Acuna Mora. Integracion de plantas eolicas a sistemas de distribucion electrica.
In CLADE 2008 Congreso Latinoamericano de Distribucion Electrica, 2008.
[8] Keith Watt Arnaud. Simulacion dinamica para distintos escenarios de alta pene-
tracion eolica en el SIC. Universidad de Chile, 2008.
[9] Miguel Eduardo Montilla D’Jesus. Control de Parques Eolicos O↵shore Conectados
a Red Mediante Enlace de Continua HVdc-LCC. Universidad Carlos III de Madrid,
2010.
[10] Sebastian Ortega. Comportamiento de un Generador Eolico sin Control de Velocidad
Acoplado a Una Red Debil. Universidad Simon Bolıvar, 1989.
[11] Luisa Julia Salazar Gil. Estudios de Red para la Integracion de Generacion Eolica
en la Isla de Margarita. Universidad Simon Bolıvar, 2011.
[12] Santiago Arnaltes Oswaldo Ravelo Paulo M De Oliveira-De Jesus Teresa Ponce de
Leao Francisco Longatt Irich Hernandez Miguel Sepulveda, Miguel Montilla. Anali-
sis de estabilidad transitoria con alta penetracion eolica. caso isla de margarita-
venezuela. page 10, 2009.
[13] Miguel Enrique Sepulveda Garcıa. Analisis de Estabilidad Transitoria de Sistemas
Electricos de Potencia con Alta Penetracion de Energıa Eolica. Universidad Simon
Bolıvar, 2009.

89
[14] Prabha Kundur John Paserba Venkat Ajjarapu Goran Aderson Anjan Bose Claudio
Canizares Nikos Hatziargyriou David Hill Alex Stankovic Carson Taylor Thierry Van
Cutsem Vijay Vittal. Definition and classification of power system stability. IEEE
Transactions on Power Systems, 19:1387–1401, 2004.
[15] Sture Lindahl Olof Samuelsson. On speed stability. IEEE Transactions on Power
Systems, 20:1179 – 1180, 2005.
[16] Nick Jenkins Ervin Bossanyi Tony Burton, David Sharpe. Wind Energy Handbook.
Wiley, 2001.
[17] A. A. Fouad P.M Anderson. Power System Control and Stability. The Iowa State
University Press, 1977.
[18] Ahmed H. El-Abiad Glenn W. Stagg. Computer Methods in Power System Analysis.
McGraw-Hill, 1968.
[19] William D. Stevenson Jr John J. Grainger. Analisis de Sistemas de Potencia.
McGraw-Hill, 1994.
APENDICE A
Modelacion de la maquina de induccion para estudio de regimen transitorio
Una maquina de induccion conduce corriente alterna tanto por el circuito rotorico como
estatorico. En una maquina de induccion trifasica, los devanados del estator son conecta-
dos a una red trifasica, mientras que los devanados del rotor pueden estar cortocircuitados
internamente o conectados a traves de anillos deslizantes en el eje a un circuito pasivo
externo.
Cuando se crea movimiento relativo entre el estator y el rotor se inducen voltajes en
los devanados del rotor, los cuales dependen de la velocidad relativa entre el rotor y el
estator. Finalmente dicha tension inducida y su consecuente corriente producen un campo
rotatorio que al reaccionar con el campo del estator produce un torque que acelera el rotor
en la direccion de rotacion del campo del estator.
Si el rotor es dirigido por una fuente motriz a una velocidad mayor a la del campo
del estator, la polaridad de los voltajes se invierte de manera que el torque resultante se
opone a la direccion de rotacion de la maquina y de esta forma la maquina opera como
generador.
A continuacion se desarrollara una representacion matematica de las maquinas de
induccion apropiada para el estudio de transitorios en sistemas electricos de potencia.
Primero se escribiran las ecuaciones basicas de la maquina en terminos de las variables de
fase (a,b,c). Luego se transformaran las ecuaciones al sistema de referencia qd0 y final-
mente se haran las simplificaciones necesarias para conformar el sistemas de ecuaciones a
emplear en estudios de estabilidad. En el desarrollo del modelo de la maquina de induccion
es importante destacar los siguientes aspectos:
El rotor de la maquina tiene una estructura simetrica, lo cual lleva a que los circuitos
de los ejes directo y en cuadratura sean identicos.
La velocidad del rotor no es fija y varıa con la carga, lo cual tiene un impacto en la
eleccion de la referencia para la transformacion a coordenadas qd0.
No hay fuente de excitacion del circuito del rotor, por lo que su dinamica es deter-
minada por el deslizamiento de la maquina.
91
Las corrientes inducidas en los devanados cortocircuitados del rotor produce un
campo con el mismo numero de polos que el producido en el devanado del estator,
permitiendo ası la modelacion del devanado del rotor como un devanado trifasico
equivalente.
Se desprecia el efecto de los polos salientes, saturacion magnetica y perdidas en el
nucleo de la maquina.
A.1 Modelo de la maquina de induccion en el sistema de coordenadas abc
La figura A.1 muestra los circuitos aplicables al analisis de la maquina de induccion en
convencion motor. El circuito del estator consiste en un devanado trifasico a, b, c distribui-
dos espacialmente a 120 grados de separacion entre sı. El circuito del rotor tiene tambien
tres devanados distribuidos A, B, C. Las fases del rotor y estator pueden estar conectadas
en delta o estrella , en este caso por simplicidad en la deduccion de las expresiones, se
muestra la conexion en estrella.
Figura A.1: Circuitos del rotor y el estator de la maquina de induccion [3]A
Por conveniencia en el analisis, se consideran solo un par de polos y se miden los angulos
en grados o radianes electricos. En la figura ✓ se define como el angulo de la fase A del
rotor que adelanta a la fase a del estator en la direccion de rotacion con una velocidad
angular del rotacion constante !r enrads, y se define como ✓ = !rt.
Sea el deslizamiento
s =!s � !r
!s
(A.1)
Bajo condiciones de deslizamiento constante se define como ✓ = (1� s)!st donde !s es
la velocidad angular del campo del estator en rads.

92
Asumiendo una distribucion sinusoidal pura en las ondas de flujo, las ecuaciones de
voltaje de la maquina pueden escribirse como:
¯Vabcs = Rs¯iabcs +
d ¯�abcsdt
(A.2)
¯Vabcr = Rr¯iabcr +
d ¯�abcrdt
(A.3)
donde
( ¯fabcs)T = [ fas fbs fcs ] (A.4)
¯(fabcr)T = [ far fbr fcr ] (A.5)
En las ecuaciones anteriores el subındice s hace referencia a variables y parametros
asociados al circuito estatorico, mientras que el subındice r hace referencia a variables
y parametros asociados al circuito rotorico. Tanto Rs como Rr son matrices diagonales.
Para un sistema magneticamente lineal los enlaces de flujo se pueden escribir como:
"¯�abcs¯�abcr
#=
"Ls Lsr
¯(Lsr)T Lr
#"¯iabcs¯iabcr
#(A.6)
Donde las matrices de inductancia son:
Ls =
2
64Lls + Lms �1
2
Lms �1
2
Lms
�1
2
Lms Lls + Lms �1
2
Lms
�1
2
Lms �1
2
Lms Lls + Lms
3
75 (A.7)
Lr =
2
64Llr + Lmr �1
2
Lmr �1
2
Lmr
�1
2
Lmr Llr + Lmr �1
2
Lmr
�1
2
Lmr �1
2
Lmr Llr + Lmr
3
75 (A.8)
Lsr = Lsr
2
64cos(✓r) cos(✓r +
2⇧
3
) cos(✓r � 2⇧
3
)
cos(✓r � 2⇧
3
) cos(✓r) cos(✓r +2⇧
3
)
cos(✓r +2⇧
3
) cos(✓r � 2⇧
3
) cos(✓r)
3
75 (A.9)
Donde Lls y Lms son respectivamente las inductancias de fuga y magnetizante de los

93
devanados del estator y Llr y Lmr las del rotor. La inductancia Lsr es la amplitud de la
inductancia mutua entre los devanados del estator y rotor.
Cuando se expresan los voltajes de la maquina en funcion de sus variables es conve-
niente referir todas las variables del rotor al estator a traves de sus respectivas vueltas
equivalentes, Ns y Nr, quedando:
¯iabcr0=
Nr
Ns
¯iabcr (A.10)
¯vabcr0=
Ns
Nr
¯vabcr (A.11)
¯�abcr0=
Ns
Nr
¯�abcr (A.12)
La inductancia mutua del estator se puede definir como:
Lms =Ns
Nr
Lsr (A.13)
Entonces, se define
Lsr
0=
Ns
Nr
Lsr (A.14)
Lsr
0= Lms
2
64cos(✓r) cos(✓r +
2⇧
3
) cos(✓r � 2⇧
3
)
cos(✓r � 2⇧
3
) cos(✓r) cos(✓r +2⇧
3
)
cos(✓r +2⇧
3
) cos(✓r � 2⇧
3
) cos(✓r)
3
75 (A.15)
Por otra parte para la inductancia mutua del rotor se puede definir como:
Lmr =
✓Nr
Ns
◆2
Lms (A.16)
y si se introduce
Lr
0=
✓Ns
Nr
◆2
Lr (A.17)

94
Entonces de la ecuacion A.8 se obtiene:
Lr
0=
2
64L
0lr + Lmr �1
2
Lmr �1
2
Lmr
�1
2
Lmr L0lr + Lmr �1
2
Lmr
�1
2
Lmr �1
2
Lmr L0lr + Lmr
3
75 (A.18)
Donde
L0
lr =
✓Ns
Nr
◆2
Llr (A.19)
Quedando los enlaces de flujo expresados finalmente como:
"¯ abcs
¯ abcr
0
#=
"Ls Lsr
0
Lsr
0TLr
#"¯iabcs¯iabcr
0
#(A.20)
Donde
Rr
0=
✓Ns
Nr
◆2
Rr (A.21)
Por otra parte, se define la ecuacion de torque de la maquina, siendo p el numero de
pares de polos de la maquina de la siguiente forma:
Te = p( ¯iabcs)T d
d✓r[Lsr
0]( ¯iabcr
0) (A.22)
siendo positiva para la operacion de la maquina como motor.
Por ultimo, en [4] se define la ecuacion de oscilacion de la maquina como:
Te = J
✓1
p
◆d!r
dt+ TL (A.23)
A.2 Modelacion de la maquina de induccion en el marco de referencia arbi-
traria qd0
Segun [4], el objetivo de realizar un cambio de variables en las ecuaciones de las
maquinas rotativas, sea esta sincronica o de induccion, es eliminar las inductancias vari-
antes en el tiempo. Es ası como la transformacion inicialmente propuesta por R. H. Park
en la decada de los 20’s para la maquina sincronica, fue replanteada por otros autores
como H.C Stanley, G. Kron y D.S. Brereton tanto para la maquina sincronica como
de induccion al fijar la referencia a distintas velocidades. Estas transformaciones fueron
tratadas individualmente y para usos especıficos hasta que en 1965 se noto que todas ellas

95
podıan ser englobadas en una transformacion general y obtenidas por separado al asignar
una velocidad apropiada de rotacion al marco de referencia qd0, llamandose ası marco de
referencia arbitrario.
A continuacion se muestra la transformacion de los circuitos del estator y rotor de la
maquina de induccion, mostradas en la seccion anterior en el sistema de coordenadas abc
al marco de referencia arbitraria qd0.
A.2.1. Transformacion al marco qd0 de referencia arbitraria para circuitos
estacionarios
Un cambio de variables que formula una transformacion de variables trifasicas de un
circuito estacionario a un marco de referencia arbitrario puede expresarse como:
¯fqd0s = Ks¯fabcs (A.24)
donde
¯fqd0T=hfqs fds f
0s
i(A.25)
¯fabcsT=hfas fbs fcs
i(A.26)
Ks =
r2
3
2
64cos(✓) cos(✓ � 2⇧
3
) cos(✓ + 2⇧
3
)
sin(✓) sin(✓ � 2⇧
3
) sin(✓ + 2⇧
3
)1p2
1p2
1p2
3
75 (A.27)
! =d✓
dt(A.28)
Donde la transformada inversa queda:
Ks�1
=
r2
3
2
664
cos(✓) sin(✓) 1p2
cos(✓ � 2⇧
3
) sin(✓ � 2⇧
3
) 1p2
cos(✓ + 2⇧
3
) sin(✓ + 2⇧
3
) 1p2
3
775 (A.29)
En estas ecuaciones f puede representar cualquier voltaje, corriente, enlace de flujo o
carga electrica y la visualizacion de dicho cambio de variables se muestra en la Figura
A.2.

96
Figura A.2: Transformacion a coordenadas qd0 de circuitos estacionarios [4]
Las ecuaciones de transformacion mostradas pueden pensarse como si las variables fqs
y fds son proyectadas en ejes ortogonales entre sı que estan girando a velocidad !, con lo
cual fas, fbs y fcs pueden considerarse como variables proyectadas en ejes estacionarios de-
splazados 120 grados entre sı. Es importante mencionar que f0s no esta asociada al marco
de referencia arbitraria, sino que estan relacionadas aritmeticamente con las variables abc
y son independientes de ✓.
Por otra parte es importante mencionar que las variables fas, fbs y fcs son cantidades
instantaneas que pueden ser cualquier funcion del tiempo. Es por ello que esta transforma-
cion es particularmente conveniente para maquinas de corriente alterna, donde la direccion
de fas, fbs y fcs puede incluso pensarse como la direccion de los ejes magneticos de los
devanados del estator, de manera que puede considerarse a fqs y fds como la direccion de
nuevos ejes magneticos creados por el cambio de variables.
La potencia instantanea total puede expresarse en variables abc como:
Pabcs = vasias + vbsibs + vcsics (A.30)
La potencia instantanea expresada en variables qd0 debe ser igual a la potencia total
expresada en variables abc, donde al sustituir la ecuacion A.24 en la ecuacion A.30 da
lugar a:
Pqd0s = Pabcs = (vqsiqs + vdsids + 2v0si0s) (A.31)
Debido a esta relacion es posible notar que la forma de la potencia total es la misma
independientemente del marco de referencia en la que esta sea evaluada.
Para transformar los circuitos resistivo-inductivo caracterısticos del devanado estatorico

97
de la maquina es conveniente tratar las resistencias e inductancias individualmente. A
continuacion se muestra la transformacion de variables del circuito estacionario al sistema
arbitrario de referencia qd0 para elementos resistivos e inductivos.
Elementos resistivos
Para un circuito trifasico resistivo se tiene que:
¯vabcs = rs ¯iabcs (A.32)
de la ecuacion de la transformacion A.24 se obtiene:
¯vqd0s = Ksrs ¯(Ks)�1 ¯iqd0s (A.33)
Dado que los sistemas de potencia estan disenados para tener resistencias iguales en
todas las fases, se puede decir que los elementos no nulos de la matriz diagonal rs son
iguales, por lo que se puede decir que:
rs = Ksrs ¯(Ks)�1 (A.34)
Elementos inductivos
Para un circuito trifasico inductivo se tiene que:
¯vabcs =d ¯�abcsdt
(A.35)
En el caso de sistemas magneticamente lineales es costumbre expresar los enlaces de
flujo como el producto de matrices de inductancia y corrientes antes de realizar el cambio
de variable. De esta forma tenemos que
¯vqd0s = Ksd
dt[(Ks)
�1 ¯�qd0s] (A.36)
que puede escribirse como:
¯vqd0s = Ksd
dt[(Ks)
�1 ¯�qd0s] + KS(Ks)�1
d ¯�qd0sdt
(A.37)
Partiendo de que
d
dt[(Ks)
�1] = !
2
64�sin✓ cos✓ 0
�sin(✓ � 2⇧
3
) cos(✓ � 2⇧
3
) 0
�sin(✓ + 2⇧
3
) cos(✓ + 2⇧
3
) 0
3
75 (A.38)

98
entonces
Ksd
dt[(Ks)
�1] = !
2
640 1 0
�1 0 0
0 0 0
3
75 (A.39)
Por otra parte, tambien se tiene que:
KS(Ks)�1 = [I] (A.40)
Finalmente se llega a la siguiente expresion
¯vqd0s = ! ¯�dqs +d ¯�qd0sdt
(A.41)
donde
¯(�dqs)T = [ �ds ��qs 0 ] (A.42)
El primer termino del lado derecho de la igualdad de la ecuacion A.41 se refiere
comunmente como voltaje de velocidad, donde ! es la velocidad angular del marco de
referencia arbitraria.
Para un sistema magnetico lineal, los enlaces de flujo se pueden expresar como:
¯�abcs = Ls¯iabcs (A.43)
donde los enlaces de flujo en el sistema de referencia arbitrario pueden escribirse:
¯�qd0s = KsLs(Ks)�1 ¯iqd0s (A.44)
Si se considera que la matriz Ls es una matriz diagonal con todos sus terminos no nulos
iguales, entonces se puede decir que
Ls = KsLs¯(Ks)
�1 (A.45)
Si usamos la matriz de inductancias del estator definidas en la ecuacion A.7, entonces
se obtiene finalmente:
KsLs¯(Ks)
�1 =
2
64Lls +
3
2
Lms 0 0
0 Lls +3
2
Lms 0
0 0 Lls
3
75 (A.46)

99
A.2.2. Transformacion al marco qd0 de referencia arbitraria para circuitos
rotativos
En la seccion anterior se introdujo y aplico la transformacion de qd0 de referencia arbi-
traria para circuitos estacionarios. Ahora es de interes transformar las variables asociadas
al circuito rotativo simetrico de lo devanados el rotor de la maquina de induccion. El
cambio de variables en este caso se define como:
¯f0qd0r = Kr
¯f0abcr (A.47)
donde
¯(f0qd0r)
T =hf
0qr f
0dr f
00r
i(A.48)
¯(f0abcr)
T =hf
0ar f
0br f
0cr
i(A.49)
Kr =
r2
3
2
64cos(�) cos(� � 2⇧
3
) cos(� + 2⇧
3
)
sin(�) sin(� � 2⇧
3
) sin(� + 2⇧
3
)1p2
1p2
1p2
3
75 (A.50)
� = ✓ � ✓r (A.51)
! =d✓
dt(A.52)
!r =d✓rdt
(A.53)
Donde la transformada inversa queda:
Kr�1
=
r2
3
2
664
cos(�) sin(�) 1p2
cos(� � 2⇧
3
) sin(� � 2⇧
3
) 1p2
cos(� + 2⇧
3
) sin(� + 2⇧
3
) 1p2
3
775 (A.54)
La visualizacion de este cambio de variables se muestra en la Figura A.3.

100
Figura A.3: Transformacion a coordenadas qd0 de circuitos rotativos [4]
A.2.3. Modelo de la maquina de induccion en el marco qd0 de referencia
arbitraria
Usando la transformacion planteada en las secciones anteriores tanto para circuitos
estaticos como en rotacion, es posible conocer la forma de las ecuaciones de voltaje de la
maquina de induccion en variables abc en el marco qd0 de referencia arbitraria. Quedando
ası el siguiente juego de ecuaciones:
¯vqd0s = rs ¯iqd0s + ! ¯�dqs +d ¯�qd0sdt
(A.55)
¯v0qd0r = r0
r¯i
0qd0r + (! � !r) ¯�
0dqr +
d ¯�0qd0r
dt(A.56)
donde
( ¯�dqs)T = [ �ds ��qs 0 ] (A.57)
( ¯�0dqr)
T = [ �0dr ��0
qr 0 ] (A.58)
El conjunto de ecuaciones estara completo una vez se obtengan las expresiones de los
enlaces de flujo. Sustituyendo las ecuaciones de transformacion A.24 y A.47en la ecuacion
de enlaces de flujo A.20 da lugar a la ecuacion para enlaces de flujo en el marco qd0 de
referencia arbitraria:
"¯�qd0s¯�0qd0r
#=
"KsLs(Ks)�1 Ks(L
0sr)
T (Kr)�1
Kr(L0sr)
T (Ks)�1 KrL0r(Kr)�1
#"¯iqd0s¯iqd0r
#(A.59)

101
Recordando que:
KsLs¯(Ks)
�1 =
2
64Lls + Lm 0 0
0 Lls + Lm 0
0 0 Lls
3
75 (A.60)
donde
Lm =3
2Lms (A.61)
Dado que L0res similar a Ls se tiene que:
KrL0r¯(Kr)
�1 =
2
64L
0lr + Lm 0 0
0 L0lr + Lm 0
0 0 L0ls
3
75 (A.62)
Posteriormente se tiene que:
KsL0sr
¯(Kr)�1 = KrL
0sr
¯(Ks)�1 =
2
64Lm 0 0
0 Lm 0
0 0 0
3
75 (A.63)
Lo que permite obtener finalmente las ecuaciones escritas de forma expandida de la
maquina de induccion como:
vqs = rsiqs + !�ds +d�qsdt
(A.64)
vds = rsids � !�qs +d�dsdt
(A.65)
v0s = rsi0s +
d�0s
dt(A.66)
v0
qr = r0
ri0
qr + (! � !r)�0
dr +d�
0qr
dt(A.67)
v0
dr = r0
ri0
dr � (! � !r)�0
qr +d�
0dr
dt(A.68)
v0
0r = r0
ri0
0r +d�
00r
dt(A.69)

102
Sustituyendo las ecuaciones A.60, A.62 y A.63 en A.59, al expandirlas queda:
�qs = Llsiqs + Lm(iqs + i0
qr) (A.70)
�ds = Llsids + Lm(ids + i0
dr) (A.71)
�0s = Llsi0s (A.72)
�0
qr = L0
lri0
qr + Lm(iqs + i0
qr) (A.73)
�0
dr = L0
lri0
dr + Lm(ids + i0
dr) (A.74)
�0
0r = L0
lri0
0r (A.75)
Adicionalmente, la introduccion de las siguientes inductancias
Lss = Lls + Lm (A.76)
L0
rr = L0
lr + Lm (A.77)
permiten la reescritura de las ecuaciones de enlaces de flujo como:
�qs = Lssiqs + Lmi0
qr (A.78)
�ds = Lssids + Lmi0
dr (A.79)
�0
qr = L0
rri0
qr + Lmiqs (A.80)
�0
dr = L0
ri0
dr + Lmids (A.81)
Estas ecuaciones se ven representadas en el circuito de la Figura A.4.

103
Figura A.4: Circuito equivalente del modelo transitorio en coordenadas qd0
En lo referente a la ecuacion del torque, al pasar por la transformacion la ecuacion
A.22 queda:
Te = p[Ks�1
iqds0]T d
d✓r[L0
sr]Kr�1
iqdr0 (A.82)
donde finalmente se obtiene:
Te = pLm(iqsi0
dr � idsi0
qr) (A.83)
A.2.4. Sistema en por unidad (pu)
El sistema en por unidad aplicado al modelo de las maquinas de induccion debe cumplir
sistema en por unidad aplicado al resto del sistema. Ası los parametros del modelo son
llevados a por unidad empleando las bases:
Vbase =p2Vnominal (A.84)
Ibase =p2Inominal (A.85)
fbase = fnominal (A.86)
La base de las cantidades restantes son entonces:
!base = 2⇡fbase (A.87)
!mec�base =1
p!base (A.88)
Zbase =Vbase
Ibase(A.89)

104
Lbase =Vbase
Ibase!base
(A.90)
�base =Vbase
!base
(A.91)
Debido a que todas las cantidades estan referidas al estator, las bases anteriores tambien
aplican a las ecuaciones del rotor.
Considerando que Vbase, y notando que Vbase = ZbaseIbase = !base�base se obtiene:
vqsVbase
=rs
Zbase
iqsIbase
+!
!base
�ds�base
+d
dt
✓1
!base
�qs�base
◆(A.92)
Ası se obtiene finalmente en notacion por unidad:
vqs
= rs
iqs
+!
!base
ds +1
!base
d qs
dt(A.93)
vds
= rs
ids
� !
!base
qs +1
!base
d ds
dt(A.94)
v0
qr
= r0
r
i0
qr
+
✓! � !r
!base
◆
0
dr +1
!base
d 0qr
dt(A.95)
v0
dr
= r0
r
i0
dr
�✓! � !r
!base
◆
0
qr +1
!base
d 0dr
dt(A.96)
qs
= Xss
iqs
+Xm
i0
qr
(A.97)
ds
= Xss
ids
+Xm
i0
dr
(A.98)
0
qr
= X0
rr
i0
qr
+Xm
iqs
(A.99)
0
dr
= X0
rr
i0
dr
+Xm
ids
(A.100)

105
Donde representa los enlaces de flujo por segundo. Las ecuaciones A.66, A.69, A.72
y A.75 son ignoradas en este caso dado que se asume la operacion balanceada del sistema
de potencia.
La manipulacion de la ecuacion A.83 de torque electrico de la maquina al ser sometida
al mismo cambio a reactancias y en por unidad queda:
Te
= p
✓X
m
Xss
X 0rr
� X2
m
◆✓1
!base
◆(
qs
dr
0 � 0
qr
ds
) (A.101)
Por otra parte, la ecuacion de oscilacion A.23, al ser transformada en por unidad
segun [4] queda:
Te
= 2Hd!r
dt+ T
L
(A.102)
A.2.5. Marco de referencia empleado para la maquina de induccion
En el caso de las maquinas sincronicas en las que los flujos del estator y rotor rotan
en sincronismo, la eleccion para la referencia de la transformacion qd0 es relativamente
obvia, siendo la mas util fijar la referencia al rotor.
La eleccion de tal referencia no es tan obvia en el caso de una maquina de induccion,
dado que si al igual que para las maquinas sincronicas se fija la referencia al rotor, debido
a que la maquina de induccion no rota a velocidad sincronica los enlaces de flujo vistos
en el marco de referencia del rotor no seran constantes, por lo que su derivada en las
ecuaciones en el voltaje no se harıan cero para regimen permanente.
Es por esto que una referencia ampliamente usada es colocar la referencia girando
a velocidad sincronica, la cual se empleara tambien en este trabajo y permite que las
cantidades proyectadas tanto en el eje q como en el d sean valores constantes.
A.3 Modelo de la maquina de induccion para estudios de estabilidad
Una maquina de induccion puede representarse de varias maneras en funcion del nivel
de precision que se requiera para evaluar su comportamiento en un estudio determinado.
En funcion de esto se definen tres modelos para representar una maquina de induccion en
estudios de transitorios electromecanicos: el modelo de quinto orden, el modelo de tercer
orden y el modelo de primer orden. A continuacion se presentan dichos modelos, y la
manera de obtenerlos a partir de las ecuaciones basicas de la maquina de induccion y su
respectiva transformacion a coordenadas qd0.
A.3.1. Modelo de 5to orden de la maquina de induccion
Observandose que las corrientes y los flujos son dependientes entre sı y que ambos no
pueden tratarse como variables de estado, a continuacion se presentan las ecuaciones de
106
voltaje en funcion de los enlaces de flujo por segundo:
vqs
=rs
X0rr
Xss
X0rr
� X2
m
qs
+1
!base
d qs
dt+
!
!base
ds
�rs
Xm
Xss
X0rr
� X2
m
0
qr
(A.103)
vds
= � !
!base
qs
+rs
X0rr
Xss
X0rr
� X2
m
ds
+1
!base
d ds
dt�
rs
Xm
Xss
X0rr
� X2
m
0
dr
(A.104)
v0
qr
= �r
0r
Xm
Xss
X0rr
� X2
m
qs
+r
0r
Xss
Xss
X0rr
� X2
m
0
qr
+1
!base
d 0qr
dt+
✓! � !r
!base
◆
0
dr
(A.105)
v0
dr
= �r
0r
Xm
Xss
X0rr
� X2
m
ds
�✓! � !r
!base
◆
0
qr
+r
0r
Xss
Xss
X0rr
� X2
m
0
dr
+1
!base
d 0dr
dt(A.106)
Este sistema de ecuaciones, junto con la ecuacion mecanica A.102 incluyendo la ecuacion
de torque A.101 conforman el llamado modelo de 5to orden de la maquina de induccion
dado que consiste de cinco ecuaciones diferenciales, cuatro ecuaciones electricas y una
ecuacion mecanica.
Si los enlaces de flujo son las variables independientes del sistema, las corrientes se
pueden obtener al pasar sus valores a traves de la matriz de reactancias de la maquina de
la siguiente forma:
2
66664
iqs
ids
iqr
idr
3
77775=
1
Xss
X0rr
� X2
m
2
66664
X0rr
0 �Xm
0
0 X0rr
0 �Xm
�Xm
0 Xss
0
0 �Xm
0 Xss
3
77775
2
66664
qs
ds
0qr
0dr
3
77775(A.107)
A.3.2. Modelo de 3er orden de la maquina de induccion
Una representacion menos detallada de la maquina de induccion se obtiene al despreciar
los transitorios electromagneticos del estator, lo cual corresponde a ignorar la componente
de corriente directa en las corrientes transitorias del estator, permitiendo la representacion
de solo las componentes de la frecuencia fundamental. De este modo, igualando a cero
las ecuaciones A.104 y A.103 y agregando las ecuaciones A.101 y A.102 que describen el
comportamiento mecanico de la maquina se obtiene el siguiente sistema de ecuaciones,
107
llamado modelo de tercer orden de la maquina de induccion:
vqs
=rs
X0rr
Xss
X0rr
� X2
m
qs
+!
!base
ds
�rs
Xm
Xss
X0rr
� X2
m
0
qr
(A.108)
vds
= � !
!base
qs
+rs
X0rr
Xss
X0rr
� X2
m
ds
�rs
Xm
Xss
X0rr
� X2
m
0
dr
(A.109)
v0
qr
= �r
0r
Xm
Xss
X0rr
� X2
m
qs
+r
0r
Xss
Xss
X0rr
� X2
m
0
qr
+1
!base
d 0qr
dt+
✓! � !r
!base
◆
0
dr
(A.110)
v0
dr
= �r
0r
Xm
Xss
X0rr
� X2
m
ds
�✓! � !r
!base
◆
0
qr
+r
0r
Xss
Xss
X0rr
� X2
m
0
dr
+1
!base
d 0dr
dt(A.111)
A.3.3. Modelo de 1er orden de la maquina de induccion
El modelo de primer orden de la maquina de induccion se obtiene al despreciar el
cambio en los flujos electromagneticos, tanto del rotor como del estator, quedando ası una
solo la ecuacion que describe el comportamiento dinamico mecanico de la maquina y
despreciando los cambios electricos. Este modelo se conoce comunmente como modelo
en regimen permanente de la maquina de induccion. Al hacer cero dichas derivadas, las
ecuaciones de los voltajes del estator y rotor quedan:
vqs
= rs
iqs
+!
!base
ds (A.112)
vds
= rs
ids
� !
!base
qs (A.113)
v0
qr
= r0
r
i0
qr
+
✓! � !r
!base
◆
0
dr (A.114)
v0
dr
= r0
r
i0
dr
�✓! � !r
!base
◆
0
qr (A.115)
Por otra parte en la operacion en regimen permanente de la maquina, las ecuaciones
de las corrientes del estator se pueden escribir como:
ia = Imcos(!st+ ↵) (A.116)
ib = Imcos(!st+ ↵� 2⇡
3) (A.117)

108
ic = Imcos(!st+ ↵� 2⇡
3) (A.118)
donde ↵ es el angulo de fase de la corriente de la fase a con respecto al origen del tiempo.
Al aplicar a ese conjunto de ecuaciones la transformacion al marco qd0 de referencia
arbitraria para circuitos estacionarios de la ecuacion A.27, poniendo a rotar la referencia
a velocidad sincronica tal que
✓ = !st (A.119)
se obtiene que las corrientes en el eje en cuadratura y directo son:
iqs = Imcos(↵) (A.120)
ids = Imsen(↵) (A.121)
entonces, para operacion en regimen permanente las corrientes del eje en cuadratura
y directo del estator son cantidades en corriente continua. Un analisis similar se aplica al
voltaje del estator y corrientes del rotor.
Por otra parte, de la transformacion inversa de la ecuacion A.29, se saque que la
corriente del estator puede escribirse como
is = ia = iqscos(!st)� idssen(!st) = iqscos(!st) + idscos(!st+⇡
2) (A.122)
Si se define Is para denotar la corriente RMS en por unidad, la ecuacion A.122 se puede
escribir de forma fasorial de la forma:
Is
= Iqs
� jIds
(A.123)
donde Iqs =iqsp2
e Ids =idsp2
. De manera similar posible obtener una expresion fasorial
del voltaje del estator y corriente del rotor quedando:
Vs
= Vqs
� jVds
(A.124)
Ir
= Iqr
� jIdr
(A.125)
lo que permite, al reescribir las ecuaciones A.112 y A.113 en funcion de la corriente al
usar las ecuaciones de los flujos electromagneticos del estator y rotor, reescribir en funcion

109
de las ecuaciones A.123, A.124 y A.125 como
Vs
= Rs
Is
+ jXs
Is
+ jXm
(Is
+ Ir
) (A.126)
donde
Xs
= Xss
� Xm
(A.127)
cuando la maquina de induccion es de rotor cortocircuitado, vdr = vqr = 0, por lo que
de las ecuaciones A.114 y A.115 se obtiene que:
Vr
= 0 =r0r
sIr
+ jXr
Ir
+ jXm
(Is
+ Ir
) (A.128)
donde
Xr
= Xrr
� Xm
(A.129)
Las ecuaciones A.143 y A.128 representan el comportamiento en regimen permanente
de la maquina de induccion y junto con la ecuacion de A.102 definen el modelo de 1er
orden de la maquina de induccion, ya que consta de solo una ecuacion que describa el
comportamiento dinamico de la maquina.
En este modelo, el torque electrico de la maquina se define como:
Te
=r0r
s!s
I2
r
(A.130)
A.3.4. Modelo transitorio de la maquina de induccion
Para estudios transitorios relativamente cortos es aceptable el uso de un modelo tran-
sitorio mas simple de la maquina de induccion, el cual se obtiene al asumir que los enlaces
de flujo del devanado del rotor permanecen constantes durante un pequeno perıodo del
transitorio. Este modelo es el usado en algunos programas de estabilidad transitoria para
representar las maquinas de induccion.
Con perturbaciones en las corrientes del estator y el rotor, las expresiones de los enlaces
de flujo del estator y rotor A.78, A.79, A.80 y A.81 quedan:
�qs0 +4�qs = Lss(iqs0 +4iqs) + Lm(i0
qr0 +4i0
qr) (A.131)
�ds0 +4�ds = Lss(ids0 +4ids) + Lm(i0
dr0 +4i0
dr) (A.132)
�0
qr0 +4�0
qr = L0
rr(i0
qr0 +4i0
qr) + Lm(iqs0 +4iqs) (A.133)

110
�0
dr0 +4�0
dr = L0
rr(i0
dr0 +4i0
dr) + Lm(ids0 +4ids) (A.134)
donde los cambios se denotan 4 y los datos previos a la perturbacion se denotan por
el subındice adicional f0
.
Si los enlaces de flujo �0qr y �
0dr se asumen sin cambios por la perturbacion, las compo-
nentes 4�0qr y 4�0
dr son cero, por lo que se puede escribir:
4�0
qr = L0
rr4i0
qr + Lm4iqs = 0 (A.135)
4�0
dr = L0
rr4i0
dr + Lm4ids = 0 (A.136)
Luego, sustituyendo las relaciones A.135 y A.136 en A.131 y A.132 respectivamente
queda:
�qs0 +4�qs = Lssiqs0 + Lmi0
qr0 +
✓Lss �
L2
m
L0rr
◆4iqs (A.137)
�ds0 +4�ds = Lssids0 + Lmi0
dr0 +
✓Lss �
L2
m
L0rr
◆4ids (A.138)
Dado que los valores previos a la perturbacion de los enlaces de flujo y las corrientes
tambien satisfacen las ecuaciones A.78, A.79, A.80 y A.81, las ecuaciones A.137 y A.138
pueden simplificarse para dar con el siguiente juego de ecuaciones entre los cambios de
enlace de flujo en el estator y los cambios de corriente en el estator cuando los enlaces de
flujo en el rotor permanecen constantes:
4�qs =✓Lss �
L2
m
L0rr
◆4iqs = L
0
ss4iqs (A.139)
4�ds =✓Lss �
L2
m
L0rr
◆4ids = L
0
ss4ids (A.140)
donde L0ss se define como la inductancia transitoria del estator.
Adicionalmente se definen las componentes qd del voltaje tras inductancia transitoria
del estator como:
E0
qs = !s(�ds � L0
ssids) (A.141)
E0
ds = �!s(�qs � L0
ssiqs) (A.142)

111
Usando las ecuaciones A.78, A.79, A.139 y A.140 se puede demostrar que estas com-
ponentes de voltaje tras la reactancia transitoria son proporcionales a los enlaces de flujo
del rotor, quedando:
E0
qs = !sLm
L0rr
�0
dr (A.143)
E0
ds = �!sLm
L0rr
�0
qr (A.144)
Entonces, al considerar constantes los enlaces de flujo del rotor durante un pequeno
perıodo de tiempo, tambien seran constantes los voltajes tras reactancia transitoria definidos
en A.143 y A.144.
Considerese ahora las expresiones del voltaje en el estator en un sistema de referencia
qd rotando a velocidad sincronica:
d�qsdt
= vqs � rsiqs � !s�ds (A.145)
d�dsdt
= vds � rsids + !s�qs (A.146)
Usando las ecuaciones A.141 y A.142 para remplazar el voltaje asociado a la velocidad
del lado derecho de la ecuacion A.145 y A.146 se obtiene el conjunto deseado de ecuaciones
del modelo transitorio de la maquina de induccion para la condicion operativa en la que
los enlaces de flujo del rotor se asumen constantes:
d�qsdt
= vqs � rsiqs � E0
qs + !sL0
ssids (A.147)
d�dsdt
= vds � rsids � E0
ds � !sL0
ssiqs (A.148)
Para condiciones en regimen permanente, es posible colocar las ecuaciones A.147 y
A.148 en su correspondiente forma fasorial al definir las siguientes cantidades, provenientes
del esquema de la transformacion de la Figura A.2.
Vs = vqs � jvds (A.149)
Vr = vqr � jvdr (A.150)
Is = iqs � jids (A.151)

112
E 0 = E0
qs � jE0
ds (A.152)
de manera que si se multiplica la ecuacion A.148 por �j y se suma la ecuacion A.147,
y se reagrupan los terminos se tiene:
(vqs � jvds) = (rs + j!sL0
ss)(iqs � jids) + E0
qs � jE0
ds (A.153)
obteniendo finalmente en cantidades fasoriales:
Vs = (rs + j!sL0
ss)Is + E 0 (A.154)
Una representacion circuital de la ecuacion A.154 se muestra en la Figura A.5.
Figura A.5: Modelo transitorio de la maquina de induccion
En un analisis transitorio simplificado de la maquina de induccion el valor de E 0 antes
de la perturbacion puede determinarse de la prefalla del sistema como:
E 0 = Vs0 � (rs + j!sL0
ss)Is0 (A.155)
Por otra parte, al despejar las corrientes i0qr e i
0dr de las ecuaciones A.80 y A.81 respec-
tivamente, y al introducirlas en las ecuaciones A.67 yA.68 se obtiene:
v0
qr = r0
r
�
0qr � Lmiqs
L0rr
!+ (!s � !r)�
0
dr +d�
0qr
dt(A.156)
v0
dr = r0
r
✓�
0dr � Lmids
Lr
◆� (!s � !r)�
0
qr +d�
0dr
dt(A.157)
Finalmente, al sustituir y reorganizar adecuadamente obtenemos:
dE0qs
dt= �!s
To
⇣Eqs � (Lss � L
0
ss)ids⌘� (!s � !r)Eds + !s
Lm
L0rr
v0
dr (A.158)
dE0ds
dt= �!s
To
⇣Eds + (Lss � L
0
ss)iqs⌘+ (!s � !r)Eqs � !s
Lm
L0rr
v0
qr (A.159)

113
donde
To =L
0rr
r0r
(A.160)
Escrito como fasor, la tension interna del generador de induccion E 0 se planteo en
la ecuacion A.152. En funcion de obtener una expresion fasorial para la variacion en el
tiempo de E 0, se manipulan las ecuaciones A.158 y A.159 y se obtiene finalmente:
dE 0
dt= �!s
To
⇣E 0 � j(Lss � L
0
ss)Is⌘� j(!s � !r)E
0 + j!sLm
L0rr
Vr (A.161)
A.4 Consideraciones del modelo de la maquina de induccion para la mod-
elacion del sistema de control de aerogeneradores
A.4.1. Generalidades
En las secciones anteriores se plantearon las ecuaciones dinamicas que describen el
comportamiento de la maquina de induccion modelada como motor, y es posible el uso
de este modelo cuando la maquina opera como generador al considerar la convencion de
signos de las entradas y salidas de potencia y torque de la maquina. Sin embargo, cuando
el objetivo del modelo es plantear un esquema de control electrico, como en el caso de
los aerogeneradores con convertidores electronicos asociados, es comun la modelacion de
la maquina en convencion generador en un sistema de referencia dq0. La obtencion de
tal modelo esta asociado a la convencion de signos tanto en las corrientes de la maquina,
como en el replanteamiento de las matrices Ks y Kr de la seccion 2.3 de este trabajo.
A continuacion se presentaran las ecuaciones de dicho modelo, con el objetivo de
plantear las ecuaciones de la maquina que serviran para la modelacion del sistema de
control de los aerogeneradores de induccion doblemente alimentados.
A.4.2. Modelo del generador de induccion en el sistema de referencia dq0
Para fines de la modelacion de control de aerogeneradores doblemente alimentados, es
ampliamente usado tanto en la literatura como en los softwares comerciales las siguientes
ecuaciones de modelo transitorio del generador de induccion [2]:
Ecuaciones de voltaje:
vds
= �rs
ids
� !s
!base
qs
+1
!base
d ds
dt(A.162)
vqs
= �rs
iqs
+!s
!base
ds
+1
!base
d qs
dt(A.163)

114
v0
dr
= r0
r
i0
dr
� s!s
!base
0
qr
+1
!base
d 0dr
dt(A.164)
v0
qr
= r0
r
i0
qr
+ s!s
!base
0
dr
+1
!base
d 0qr
dt(A.165)
Ecuaciones de flujos por segundo:
ds
= �Xss
ids
+Xm
i0
dr
(A.166)
qs
= �Xss
iqs
+Xm
i0
qr
(A.167)
0
dr
= X0
rr
i0
dr
�Xm
ids
(A.168)
0
qr
= X0
rr
i0
qr
�Xm
iqs
(A.169)
Con estas ecuaciones, al hacer las sustituciones de las ecuaciones
E0
ds
= �!s
Lm
L0rr
0
qr
(A.170)
E0
qs
= !s
Lm
L0rr
0
dr
(A.171)
en A.164 y A.165, queda:
dE0ds
dt= �!s
To
⇣E
ds
� (Xs
� X0
ss
)iqs
⌘+ s
!s
!base
Eqs
� !s
Lm
L0rr
v0
qr
(A.172)
dE0qs
dt= �!s
To
⇣E
qs
+ (Xs
� X0
ss
)ids
⌘� s
!s
!base
Eds
+ !s
Lm
L0rr
v0
dr
(A.173)
Por otra parte, es posible tambien definir las cantidades fasoriales acorde a la referencia
dq0 como:
Vs = vds + jvqs (A.174)
Vr = vdr + jvqr (A.175)
Is = ids + jiqs (A.176)

115
E 0 = E0
ds + jE0
qs (A.177)
lo que permite finalmente expresar la derivada de la tension interna del generador de
induccion a partir de A.177 usando A.172 y A.173 de la siguiente forma:
dE0
dt= �!base
To
hE0 � j(X
s
�X0
ss
)Is
i+ js!sE
0 � j!s
Lm
Lrr
Vr
(A.178)
APENDICE B
Datos del sistema de 9 barras y datos necesarios y empleados por SMS y
SAIMS
A continuacion se muestran los datos del sistema electrico extraıdo de [17], la potencia
base empleada en el sistema es 100 MVA.
B.1 Caso sincronico
B.1.1. Diagrama unifilar
Figura B.1: Unifilar del sistema IEEE de 9 barras

117
B.1.2. Datos del sistema
B.1.2.1. Lıneas de transmision
Todas las lıneas son aereas. El sistema de transmision opera a 230 KV.
Tramo Longitud (Km) R (ohm/Km) X (ohm/Km) B (µmho/Km)
4-5 65 0.08138 0.69177 5.118
5-7 142 0.11921 0.59978 4.073
7-8 55 0.08175 0.69251 5.120
8-9 77 0.08175 0.69251 5.130
9-6 164 0.12580 0.54835 4.126
6-4 77 0.11679 0.63205 3.878
B.1.2.2. Transformadores
TRX KVBT /KVAT Snominal Xcc (%)
1-2 16.5/230 250 14.40
2-7 18.0/230 200 12.50
3-9 13.8/230 150 8.79
B.1.2.3. Cargas
Las cargas son modeladas como impedancia constante.
Barra de conexion P (MW) Q (MVAr)
5 125 50
6 90 30
8 100 35
B.1.2.4. Maquinas sincronicas
Valores nominales
Barra de generacion KVnominales MVAnominales fpnominal
1 16.5 247.5 1.00
2 18.0 192.0 0.85
3 13.8 128 0.85

118
Datos para el flujo de carga
Generador Tipo Uoper (%) Uwoper (%) Pgen (MW)
1 SLACK 104.0 0 -
2 PV 102.5 - 163.2
3 PV 102.5 - 85.0
Datos para el analisis dinamico
Se utilizo el modelo clasico de la maquina sincronica.
Generador H (seg) X0d (pu)
1 9.552 15.048
2 3.333 23.002
3 2.352 23.206
B.1.3. Formato de los datos necesarios por el programa para el calculo del
avance de los angulos de las maquinas sincronicas
El formato empleado por el programa es el siguiente:
Figura B.2: Formato de los datos empleados por el programa que calcula el avance delangulo de las maquinas sincronicas del problema de estabilidad clasica de angulo
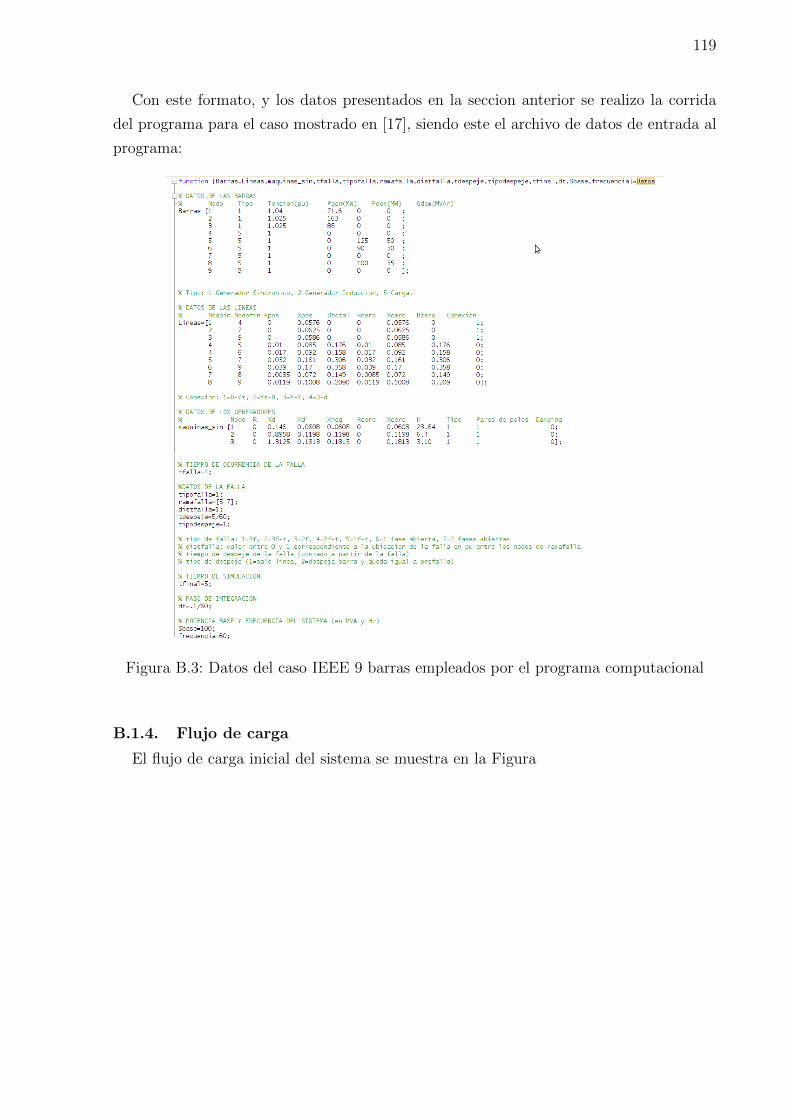
119
Con este formato, y los datos presentados en la seccion anterior se realizo la corrida
del programa para el caso mostrado en [17], siendo este el archivo de datos de entrada al
programa:
Figura B.3: Datos del caso IEEE 9 barras empleados por el programa computacional
B.1.4. Flujo de carga
El flujo de carga inicial del sistema se muestra en la Figura
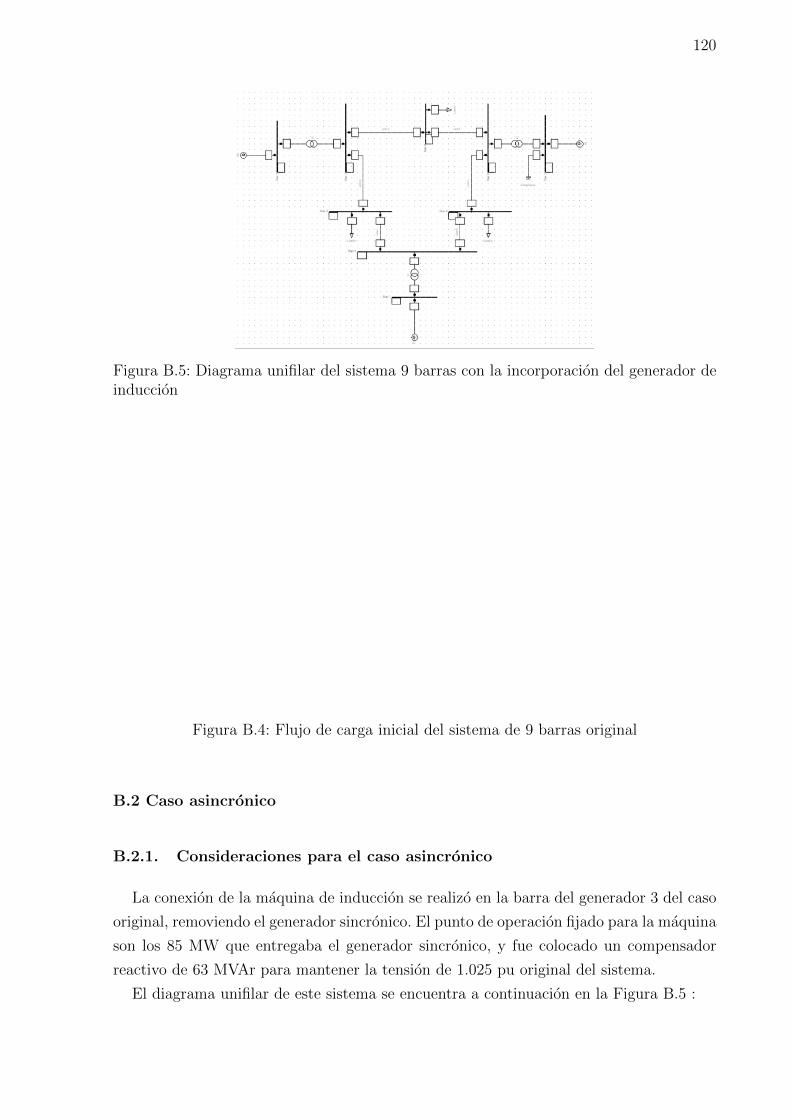
120
Figura B.5: Diagrama unifilar del sistema 9 barras con la incorporacion del generador deinduccion
Figura B.4: Flujo de carga inicial del sistema de 9 barras original
B.2 Caso asincronico
B.2.1. Consideraciones para el caso asincronico
La conexion de la maquina de induccion se realizo en la barra del generador 3 del caso
original, removiendo el generador sincronico. El punto de operacion fijado para la maquina
son los 85 MW que entregaba el generador sincronico, y fue colocado un compensador
reactivo de 63 MVAr para mantener la tension de 1.025 pu original del sistema.
El diagrama unifilar de este sistema se encuentra a continuacion en la Figura B.5 :

121
Los datos de la maquina son los siguientes, mostrando los parametros del circuito en
regimen permanente en por unidad de su base:
Barra de generacion KVnominales MVAnominales rs xs xm r0r x0r
3 13.8 200 0.03 0.1 3 0.05 0.1
Las curvas de potencia activa y reactiva de la maquina, a una tension de 1 pu en sus
terminales es la siguiente:
Figura B.6: Curva de potencia activa y reactiva de la maquina de induccion empleado enel caso asincronico
B.2.2. Formato de los datos necesarios por el programa para el calculo del
avance de los angulos de las maquinas sincronicas y velocidad de las
maquinas de induccion
El formato empleado por el programa es el siguiente:

122
Figura B.7: Formato de los datos empleados por el programa que calcula el avance delangulo de las maquinas sincronicas del problema de estabilidad clasica de angulo y develocidad de las maquinas de induccion
Con este formato, y los datos presentados en la seccion anterior se realizo la corrida del
programa para el caso asincronico, siendo este el archivo de datos de entrada al programa:

123
Figura B.8: Datos del sistema 9 barras empleados por SAIMS
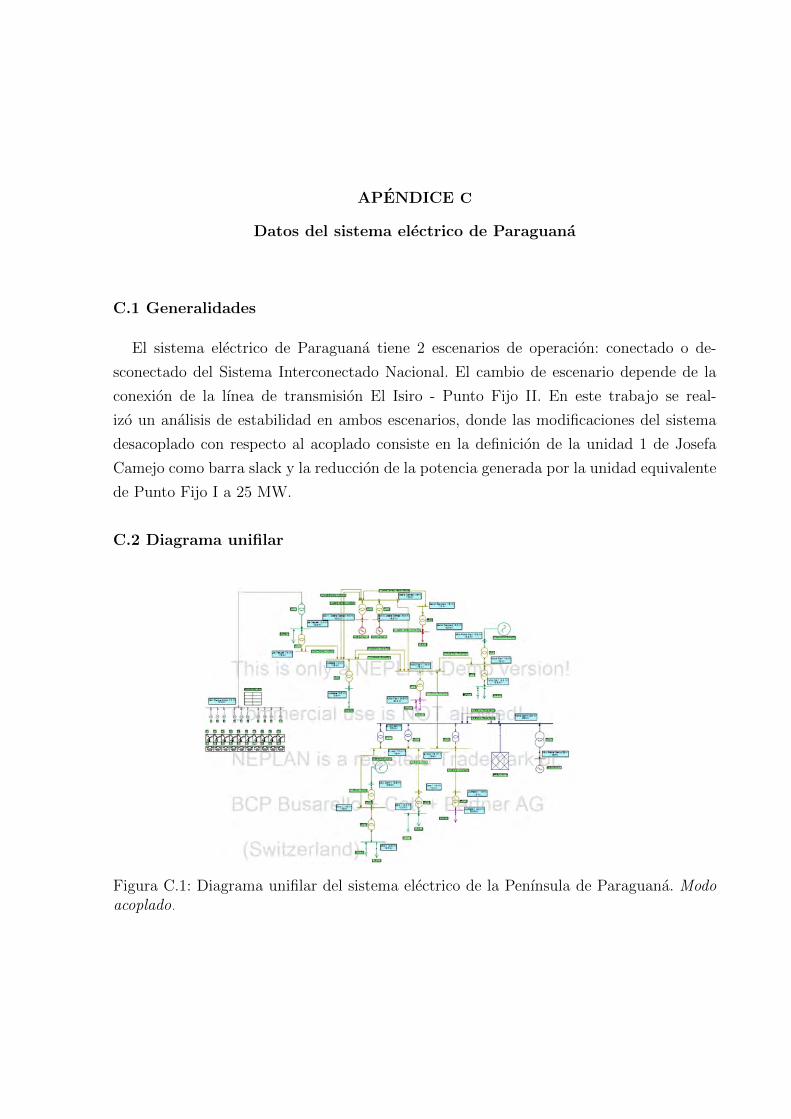
APENDICE C
Datos del sistema electrico de Paraguana
C.1 Generalidades
El sistema electrico de Paraguana tiene 2 escenarios de operacion: conectado o de-
sconectado del Sistema Interconectado Nacional. El cambio de escenario depende de la
conexion de la lınea de transmision El Isiro - Punto Fijo II. En este trabajo se real-
izo un analisis de estabilidad en ambos escenarios, donde las modificaciones del sistema
desacoplado con respecto al acoplado consiste en la definicion de la unidad 1 de Josefa
Camejo como barra slack y la reduccion de la potencia generada por la unidad equivalente
de Punto Fijo I a 25 MW.
C.2 Diagrama unifilar
Figura C.1: Diagrama unifilar del sistema electrico de la Penınsula de Paraguana. Modoacoplado .
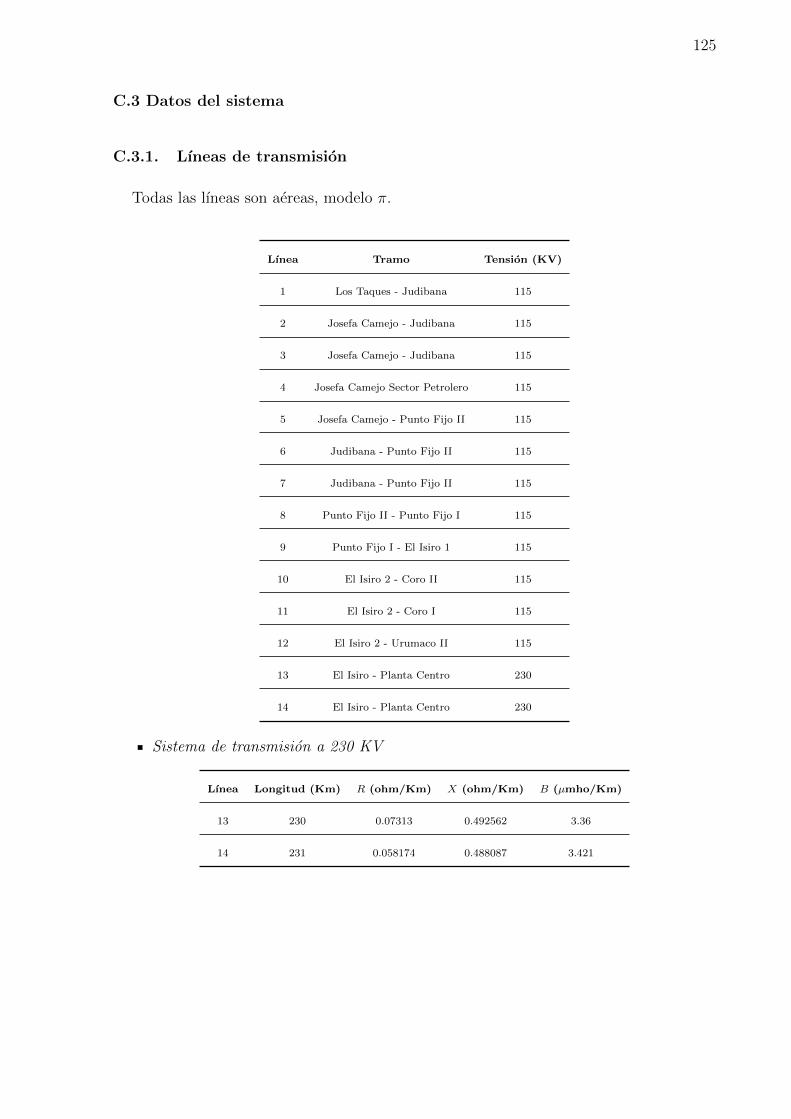
125
C.3 Datos del sistema
C.3.1. Lıneas de transmision
Todas las lıneas son aereas, modelo ⇡.
Lınea Tramo Tension (KV)
1 Los Taques - Judibana 115
2 Josefa Camejo - Judibana 115
3 Josefa Camejo - Judibana 115
4 Josefa Camejo Sector Petrolero 115
5 Josefa Camejo - Punto Fijo II 115
6 Judibana - Punto Fijo II 115
7 Judibana - Punto Fijo II 115
8 Punto Fijo II - Punto Fijo I 115
9 Punto Fijo I - El Isiro 1 115
10 El Isiro 2 - Coro II 115
11 El Isiro 2 - Coro I 115
12 El Isiro 2 - Urumaco II 115
13 El Isiro - Planta Centro 230
14 El Isiro - Planta Centro 230
Sistema de transmision a 230 KV
Lınea Longitud (Km) R (ohm/Km) X (ohm/Km) B (µmho/Km)
13 230 0.07313 0.492562 3.36
14 231 0.058174 0.488087 3.421

126
Sistema de transmision a 115 KV
Lınea Longitud (Km) R (ohm/Km) X (ohm/Km) B (µmho/Km)
1 10 0.172 0.436 3.496
2 0.89 0.029 0.3817 4.382
3 0.89 0.029 0.3817 4.382
4 21 0.09 0.42 3.6
5 10 0.059 0.3817 4.382
6 8.05 0.121739 0.462112 3.604
7 6 0.171667 0.516667 3.604
8 3 0.173333 0.476667 3.497
9 86 0.100581 0.515233 3.224
10 84 0.10084 0.47378 3.498
11 20 0.0865 0.447 3.496
12 20 0.0865 0.447 3.496
13 60 0.0865 0.447 3.496
C.3.2. Transformadores
El sistema de enfriamiento de los transformadores se asumio Tipo OA. Son autotrans-
formadores las unidades 10 y 11.

127
TRX Barra baja tension Barra alta tension Snom(MVA) Zcc(%) X/R
1 Parque Eolico 3.3 KV Los Taques 13.8 KV 120 4 40.01
2 Los Taques 13.8 KV Los Taques 115 KV 120 6 40.01
3 Judibana 13.8 KV Judibana 115 KV 40 8 28.02
4 Josefa Camejo 16.5 KV 1 Josefa Camejo 115 KV 200 6.5 44.7
5 Josefa Camejo 16.5 KV 2 Josefa Camejo 115 KV 200 6.5 44.7
6 Sector Petrolero 16.5 KV Sector Petrolero 115 KV 100 8 37.36
7 GEN Punto Fijo I 13.8 KV Punto Fijo I 115 KV 200 8 44.7
8 Punto Fijo I 13.8 KV Punto Fijo I 115 KV 150 8 41.51
9 Punto Fijo 34.5 KV Punto Fijo 115 KV 50 8 30.02
10 El Isiro 115 KV 2 El Isiro 230 KV 50 8 30.02
11 El Isiro 115 KV 2 El Isiro 230 KV 50 8 37.36
12 El Isiro 115 KV 1 El Isiro 230 KV 100 10 37.36
13 GEN Coro II 13.8 KV Coro II 115 KV 100 8 37.36
14 Coro II 13.8 KV Coro II 115 KV 80 8 34.69
15 Coro I 13.8 KV Coro I 115 KV 50 8 30.02
16 Urumaco II 34.5 Urumaco II 115 KV 30 8 26.01
17 Planta Centro 26 KV Planta Centro 230 KV 440 8 49.47
C.3.3. Cargas y compensacion reactiva
El factor de potencia de las cargas es fp = 0.9 inductivo y fueron modeladas como
impedancia constante. La compensacion reactiva es capacitiva.
Cargas

128
Carga Barra de conexion S (MVA)
1 Los Taques 13.8 KV 5.45
2 Judibana 13.8 KV 24.87
3 Sector Petrolero 16.5 KV 30.00
4 Punto Fijo I 13.8 KV 119.90
5 Punto Fijo II 34.5 KV 44.16
6 Coro II 13.8 KV 59.01
7 Coro I 13.8 KV 41.79
8 Urumaco II 34.5 KV 11.61
Compensacion
Shunt Barra de conexion Q (MVAr)
1 Punto Fijo I 13.8 KV 12
2 Coro II 13.8 KV 12
3 Coro I 13.8 KV 12
Cuando se conecta el parque con aerogeneradores de velocidad fija para los distintos
niveles potencia simulados, se conecto un capacitor que llevara a 1 el factor de potencia
de la barra. Estos capacitores son:
Potencia activa generada por el parque [MW] Q (MVAr)
10 5.380
20 10.744
30 16.097
40 21.443
50 26.787
C.3.4. Sistema equivalente
El sistema electrico de Paraguana opera de dos maneras. Si la lınea L10 interconectan
la Penınsula de Paraguana con el sistema electrico nacional, este opera en modo acoplado.
Por el contrario, si opera aislado del sistema inteconectado nacional, se dice que opera en
modo desacoplado. En el presente estudio se cosideran ambos casos.

129
Para cuando el sistema opera en modo acoplado, se considero como barra slack Planta
Centro 230 KV. El sistema equivalente visto desde esta barra cuando en Planta Centro
operan 3 generadores, fue modelado con los siguientes datos:
Tipo % slack / U oper (%) S00k max (MVA) [R(1)/X(1)]max
Slack 100 8590.487 0.050037371
C.3.5. Maquinas sincronicas
El criterio utilizado en la modelacion de las maquinas sincronicas es el siguiente:
1. Se utilizo el modelo subtransitorio para todos los generadores.
2. No se coloco AVR en ninguna de las maquinas.
3. Todas las maquinas son de rotor liso.
Por haber utilizado una version con licencia demo, las limitaciones en cuanto al numero
de barras y elementos disponibles para utilizar forzo la realizacion de equivalentes de
maquinas en ciertos puntos de generacion [19]. Las constantes de inercia fueron obtenidas
mediante aproximaciones sobre una curva de constantes de inercia tıpicas extraıda de [17]
una vez obtenidos los equivalentes de maquinas sincronicas necesarios.
Valores nominales
Generador Nombre KVnominales MVAnominales fpnominal
1 Planta Centro 26.0 440 0.85
2 Josefa Camejo U1 16.5 160 0.85
3 Josefa Camejo U2 16.5 160 0.85
4 EQ Generacion Punto Fijo I 13.8 200 0.85
5 EQ Generacion Coro II 13.8 100 0.80
Datos para el flujo de carga
Generador Tipo Uoper (%) Pgen (MW)
1 PV 100 283
2 PV 100 85
3 PV 100 85
4 PV 100 70
5 PV 100 70

130
Datos para el analisis dinamico
Se considero X00d = X”
q .
Generador H (seg) R (pu) Xl (%) Xd (%) Xq (%) X0d (%) X
0q (%) X
00d (%)
1 1.275 0.0043 15.0 167.0 160 26.92 46 20.5
2 2.550 0.0031 11.0 170.0 164 24.50 38 18.5
3 2.550 0.0031 11.0 170.0 164 24.50 38 18.5
4 2.1240 0.0026 10.2 165.1 159 27.70 38 17.1
5 2.1240 0.0026 10.2 165.1 159 27.70 38 17.1
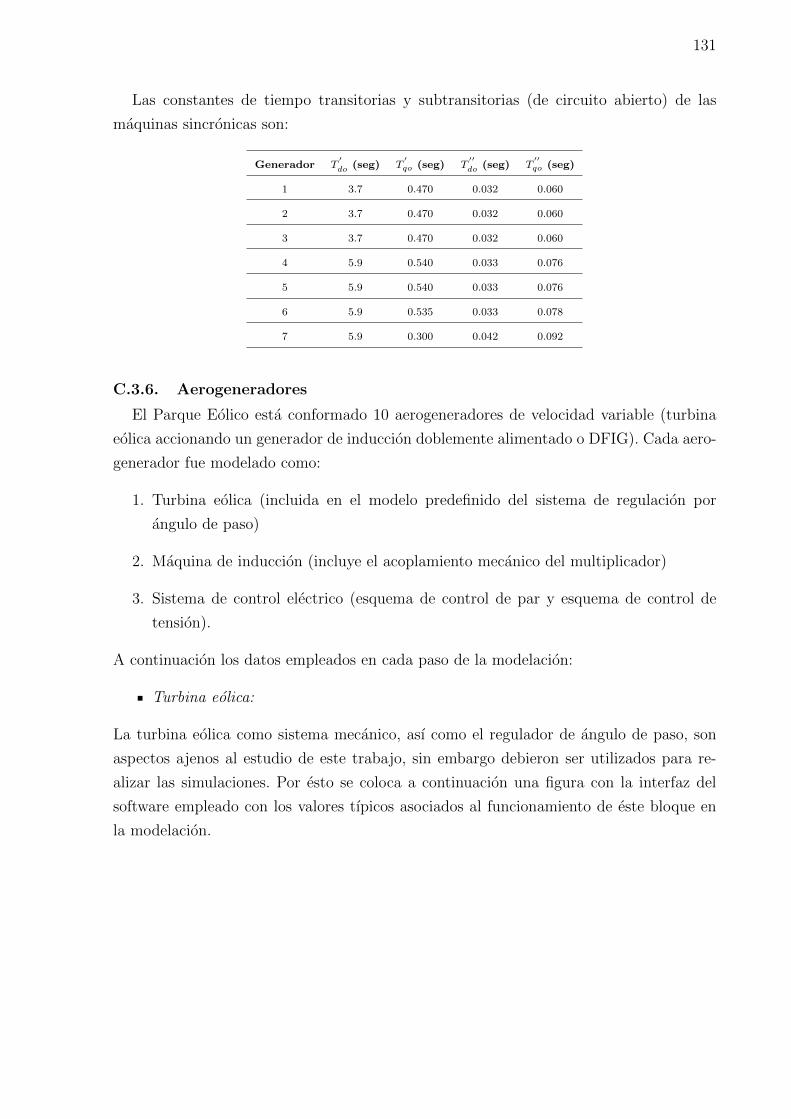
131
Las constantes de tiempo transitorias y subtransitorias (de circuito abierto) de las
maquinas sincronicas son:
Generador T0do (seg) T
0qo (seg) T
00do (seg) T
00qo (seg)
1 3.7 0.470 0.032 0.060
2 3.7 0.470 0.032 0.060
3 3.7 0.470 0.032 0.060
4 5.9 0.540 0.033 0.076
5 5.9 0.540 0.033 0.076
6 5.9 0.535 0.033 0.078
7 5.9 0.300 0.042 0.092
C.3.6. Aerogeneradores
El Parque Eolico esta conformado 10 aerogeneradores de velocidad variable (turbina
eolica accionando un generador de induccion doblemente alimentado o DFIG). Cada aero-
generador fue modelado como:
1. Turbina eolica (incluida en el modelo predefinido del sistema de regulacion por
angulo de paso)
2. Maquina de induccion (incluye el acoplamiento mecanico del multiplicador)
3. Sistema de control electrico (esquema de control de par y esquema de control de
tension).
A continuacion los datos empleados en cada paso de la modelacion:
Turbina eolica:
La turbina eolica como sistema mecanico, ası como el regulador de angulo de paso, son
aspectos ajenos al estudio de este trabajo, sin embargo debieron ser utilizados para re-
alizar las simulaciones. Por esto se coloca a continuacion una figura con la interfaz del
software empleado con los valores tıpicos asociados al funcionamiento de este bloque en
la modelacion.

132
Figura C.2: Interfaz grafica de la turbina eolica en Neplan 5.4.5
La interfaz mostrada en la Figura C.2 corresponde con:
Tipo de turbina: dfig turbine
Modelo de la turbina: mdltype ctrl dfig turbine

133
Maquinas de induccion
Los parametros nominales de la maquina de induccion son:
Numero de maquinas 1
Vnominal (KV) 3.3
Pmecanicanominal (MW) 5
snominal (%) 2.903041
2p 2
cos(�)arranque 0.2362
Eficiencia @ Snominal y snominal (%) 0.992633
cos(�) @ Snominal y snominal (%) 0.854977
Iarranque/Inominal 6.1422
Mk/Mnominal 2.0614
parametros del sistema de control
Proteccion de sobrecorriente (active crowbar)
RC XC Imaxrot (pu) tpick�up (seg) treset (seg)
0.1 0.1 4.5 0.0001 0.5
Esquema de control de par
KP TP KIQ TIQ
1.0 0.1 0.2 0.01
Esquema de control de tension
KQ TQ KID TID QREF
1.0 0.1 0.2 0.01 0.0
Modelo del acoplamiento mecanico del multiplicador
Se utilizo el modelo de una masa del multiplicador. Debe introducirse al software la suma
H = Hgen +Htur para aplicar este modelo.
Hgen (seg) Htur (seg)
0.5 valor variable 1.5 - 8.5
Related Documents











