M.C. Cynthia Guerrero ANALISIS CINEMATICO DIRECTO E INVERSO M.C. Cynthia Guerrero [x,y,z] Articulaciones Cinematica directa x=f(q) Posicion de la Herramienta Cinematica Inversa q=f -1 (x)

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
M.C. Cynthia Guerrero
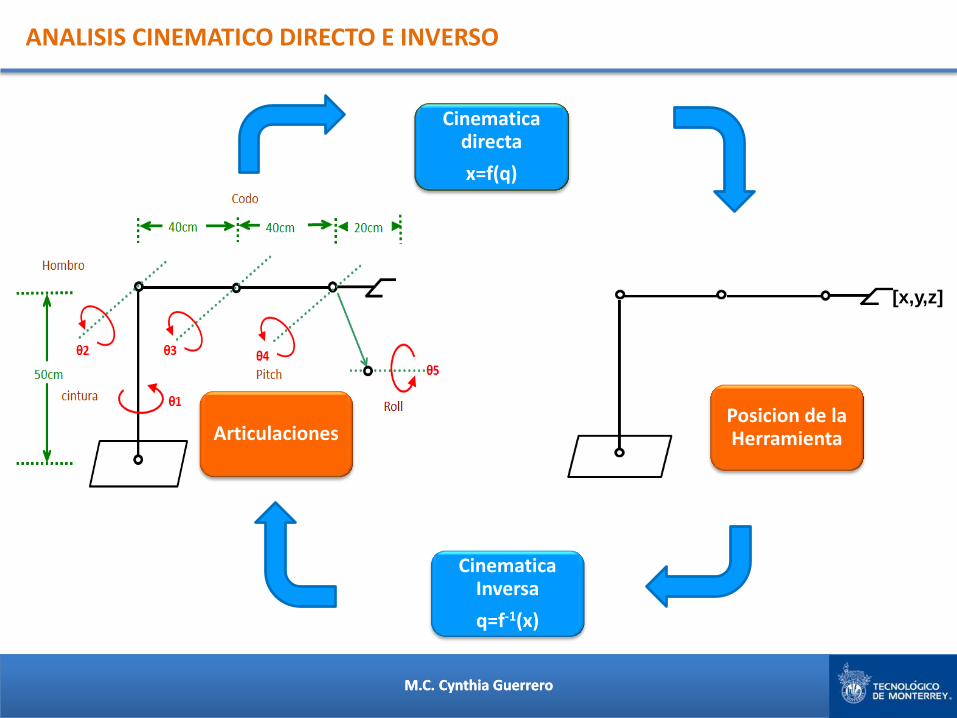
ANALISIS CINEMATICO DIRECTO E INVERSO
M.C. Cynthia Guerrero
[x,y,z]
Articulaciones
Cinematica directa
x=f(q)
Posicion de la Herramienta
Cinematica Inversa
q=f-1(x)

M.C. Cynthia Guerrero M.C. Cynthia Guerrero
El analisis cinematico inverso nos permite calcular la posicion
que deben de terner las articulaciones si queremos que la
herramienta del robot se localice en un punto y orientacion en
particular.
• La resolucion no es sistematica.
• Depende de la configuracion del robot.
2.7 ANALISIS CINEMATICO INVERSO

M.C. Cynthia Guerrero M.C. Cynthia Guerrero
Existen varios metodos para obtener la cinematica inversa:
1. Metodos geometricos. Se suelen utilizar para obtener las
primeras variables atriculares, usando relaciones
geometricas y trigonometricas (resolucion de triangulos).
2. Resolucion apartir de las matrices de transformacion
homogeneas. Consiste en despejar las n variables qi en
funcion de los componentes de los vectores de R (rotacion)
y P (traslacion).
3. Desacoplamiento cinemaico. Utilizado en robots de 6 GDL.
4. Otros: Algebra de tornillo, cuaterniones duales, metodos
iterativos, etc.
2.7 ANALISIS CINEMATICO INVERSO

M.C. Cynthia Guerrero
METODO GEOMETRICO
M.C. Cynthia Guerrero
Como se ah indicado, este procedimiento es adecuado para
robots con pocos grados de libertad o para el caso de que se
consideren solo los primeros grados de libertad dedicados a
posicionar el extremo.
El procedimiento en si se basa en encontrar sufieciente numero
de relaciones geometricas en las que intervendran las
coordenadas del extremo del robot, sus coordenadas articulares
y las dimensiones fisicas de los elementos.
2.7 ANALISIS CINEMATICO INVERSO

M.C. Cynthia Guerrero
Vector de configuración de la herramienta
M.C. Cynthia Guerrero
La información necesaria de la configuración de la herramienta es, al
menos, las coordenadas del punto a donde debe llegar la punta de la
herramienta. Para algunas aplicaciones es necesario especificar
también la orientación de la herramienta. Sin embargo, pasar la
orientación de cada vector del sistema coordenado de la punta de la
herramienta puede resultar redundante, además de tedioso y difícil.
Para este propósito definimos dos ángulos para especificar la
orientación de la herramienta, un ángulo de elevación respecto del
plano x0-y0, llamado azimut y denotado por γ, con la definición de
sentido de giro mostrada en la Figura.
Plano x0-y0
Plano x0-y0
< 0
> 0
Definición del ángulo de elevación .
2.7 ANALISIS CINEMATICO INVERSO

M.C. Cynthia Guerrero
Vector de configuración de la herramienta
M.C. Cynthia Guerrero
El segundo ángulo de orientación es un ángulo de alineación con
respecto del eje x0 en una vista superior, y es llamado meridiano y
denotado por μ. Dependiendo del robot, el ángulo puede ser la
alineación del vector de aproximación (zn) o del vector normal (xn)
respecto del eje x0, la Figura 3.2 muestra la definición del sentido de
giro para μ (usando el vector normal xn).
Definición del ángulo de alineación μ.
2.7 ANALISIS CINEMATICO INVERSO
xn
x0
xn
x0
0
0

M.C. Cynthia Guerrero
Configuraciones del brazo
M.C. Cynthia Guerrero
Para posicionar a la herramienta en punto dado
existen distintas formas de configuracion del brazo:
• Brazo derecho (hombro): θ1 positivo, mueve a la
muñeca en la dirección z0 positivo mientras la
articulación 3 no se activa.
• Brazo izquierdo (hombro): θ1 negativo, mueve a
la muñeca en la dirección z0 negativa mientras la
articulación 3 no se activa.
• Codo arriba: Mueve a lo largo de Y2 en forma
positiva, que esta en referencia con las
coordenadas del hombro.
• Codo abajo: Mueve a lo largo de Y2 en forma
negativa, que esta en referencia con las
coordenadas del hombro.
2.7 ANALISIS CINEMATICO INVERSO
Brazo izquierdo
Brazo derecho
Codo arriba
Codo abajo
SCARA
ARTICULADO

M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
T
zyx pppw
Tq 4321
Asumiendo la asignación de ejes hecha en la 2ª unidad, y dado el vector
de configuración de la herramienta
Encontrar las variables de las articulaciones,

M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
senA SenB SenC
a b c
2 2 2 2a b c bcCosA
Algunas identidades trigonometricas:
A
B
C
a
b
c

X0
M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista superior
Y0 X1
Px
Py
Pxy
θ1

M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista superior
X0
Y0 X1
Px
Py
Pxy
θ1
1
1 tany
x
p
p
22
yxxy ppp
Para θ1:

M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista lateral
x3 x4
x2
x1
4
3
d5
d1
a2
a3
2
e
f
pz
pxy

Para θ2:
M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista lateral
cos5dpf xy
15 dsendpe z
x3 x4
x2
x1
4
3
d5
d1
a2
a3
2
e
f
pz
pxy
d5 cos
d5 sen
2 2c e f
c
1tane
f
ca
caa
2
22
2
2
31
2cos
2

Para θ3:
M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista lateral
x3 x4
x2
x1
4
3
d5
d1
a2
a3
2
e
f
pz
pxy
d5 cos
d5 sen
c
2 2 21 3 2
2 3
-cos
2
c a a
a a
3

Para θ4:
M.C. Cynthia Guerrero
Robot articulado 5GDL (Pitch y Roll)
M.C. Cynthia Guerrero
2.7 ANALISIS CINEMATICO INVERSO
Vista lateral
x3 x4
x2
x1
4
3
d5
d1
a2
a3
2
e
f
pz
pxy
d5 cos
d5 sen
c
3
2 3
Elevacion de x con respecto
al plano xy es
tomando en cuenta el sentido de giro
4 2 390
2+3
4
5
Elevacion de x con respecto al plano
xy es 90 ya que es ortogonal a d
y tomando en cuenta el signo de .
Related Documents