An Introduction to Type-2 Fuzzy Sets and Systems Dr Simon Coupland [email protected] Centre for Computational Intelligence De Montfort University Leicester United Kingdom www.cci.dmu.ac.uk

An Introduction to Type-2 Fuzzy Sets and Systems Dr Simon Coupland [email protected] Centre for Computational Intelligence De Montfort University Leicester.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
An Introduction toType-2 Fuzzy Sets
and Systems
Dr Simon Coupland
[email protected] for Computational Intelligence
De Montfort UniversityLeicester
United Kingdom
www.cci.dmu.ac.uk

Contents
My background Motivation Interval Type-2 Fuzzy Sets and Systems Generalised Type-2 Fuzzy Sets and Systems An Example Application – Mobile Robotics

My Background
Research Fellow from the UK Here on a collaborative grant with Prof. Keller Worked in type-2 fuzzy logic for 5 years Awarded PhD “Geometric Type-2 Fuzzy
Systems” in 2006 Working on:
Computational problems of generalised type-2 fuzzy logic
Applications

My Background
Created and maintain type2fuzzylogic.org Information, experts, publications (~450),
news and events ~600 members ~70 countries

Type-2 Publications

Type-1 Fuzzy Sets
Extend crisp sets, where x A or x A Membership is a continuous grade [0,1] Describe vagueness – not uncertainty (Klir
and Yuan)

Why do we need type-2 fuzzy sets?
Type-1 fuzzy sets do not model uncertainty:
1.8
0.62
Tall
0
1
Height (m)

Why do we need type-2 fuzzy sets?
So, a person x, who’s height is 1.8 metres is Tall to degree 0.62 (Tall(1.8) = 0.62)
Improvement on Tall or not Tall Vagueness, but no uncertainty How do we model uncertainty?

Why do we need type-2 fuzzy sets?
We need, x is Tall to degree about 0.62 But how to model about 0.62? Two schools of thought:
Interval type-2 fuzzy sets – about 0.62 is a crisp interval
Generalised type-2 fuzzy sets – about 0.62 is a fuzzy set
Run blurring example

Interval Type-2 Fuzzy Sets
Interval type-2 fuzzy sets - interval membership grades
X is primary domain Jx is the secondary domain All secondary grades (A(x,u)) equal 1 Fully characterised by upper and lower
membership functions (Mendel and John)
A = {((x,u), 1) | x X, u Jx, Jx [0,1]}~
~

Interval Type-2 Fuzzy Sets
Returning to TallTall
0
1
Height (m)
~ Upper MF Tall
Lower MF Tall
Type -1 MF= FOU
~
Interval Type-2 Fuzzy Sets
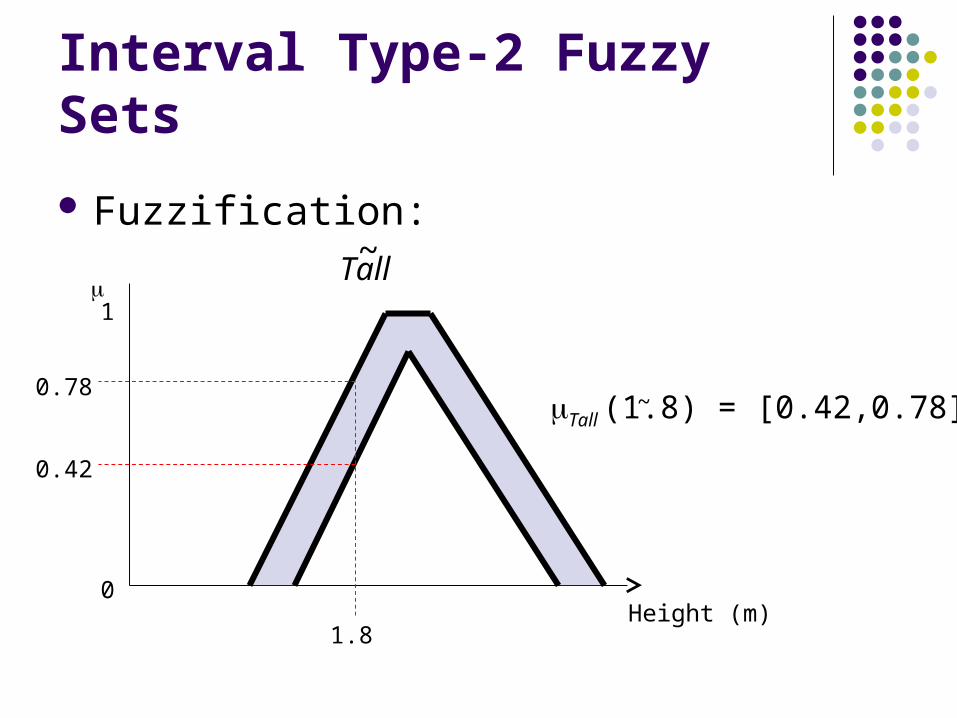
Fuzzification:
1.8
0.42
Tall
0
1
Height (m)
~
0.78Tall (1.8) = [0.42,0.78]

Interval Type-2 Fuzzy Sets
Defuzzification – two stages: Type-reduction Interval centroid
Type-reduction (centroid):
GC = 1Jx1… 1JxN
1 = [Cl, Cr]/
i=1 xii
i=1 i
N
N
(Karnik and Mendel)

Interval Type-2 Fuzzy Sets
Only need to identify two embedded fuzzy sets
Only Jx1 and JxN
will belong to those sets
Identify two ‘switch points’ on X Switch point against X is a convex function Mendel and Liu showed
switch point = C where {l,r}

Interval Type-2 Fuzzy Sets
Defuzzification:Tall
0
1
Height (m)
~
Cl Cr

Interval Type-2 Fuzzy Sets
XCl switch point
Cen
troi
d
Cl

Interval Type-2 Fuzzy Sets
XCr switch point
Cen
troi
d
Cr

Interval Type-2 Fuzzy Sets
These properties are exploited by Karnik-Mendel algorithm
Converges in at most N steps 3-4 steps typical Widely used Hardware implementation

Interval Type-2 Fuzzy Systems
Fuzzifier
Defuzzifier
Rules
Inference
Type-reducer
Crispinputs
Crispoutputs
Type-reducedoutputs
(interval)
Output processing
Type-2 Interval FIS

Interval Type-2 Fuzzy Systems
Mamdani or TSK systems We’ll only look at Mamdani Example rule base:
1. If x is A and y is B then z is G1
2. If x is C and y is D then z is G2
~
~
~
~
~
~

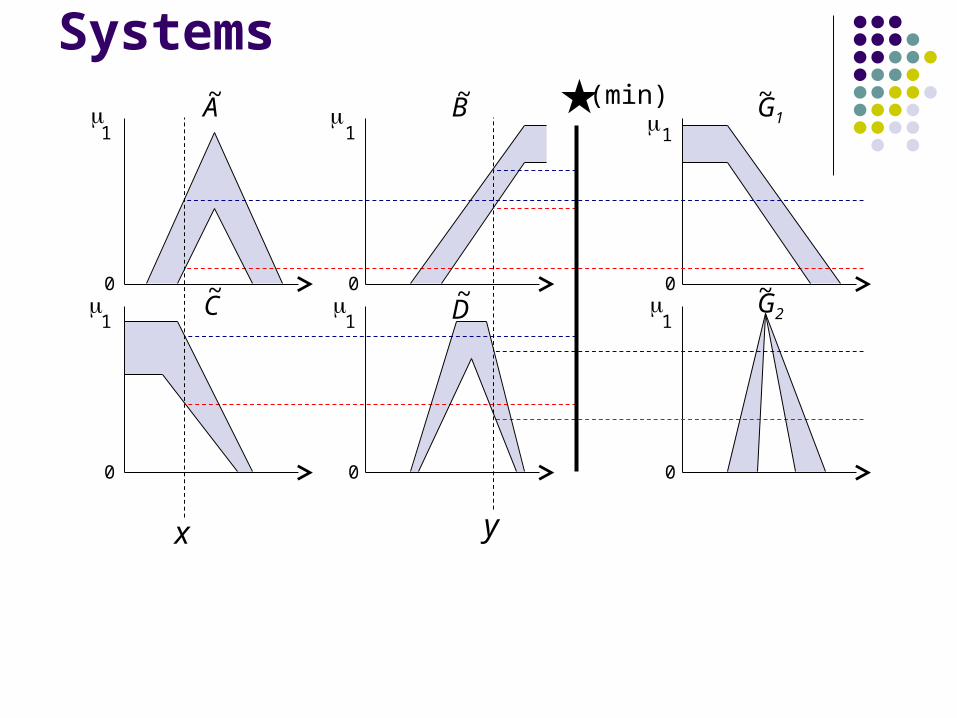
Interval Type-2 Fuzzy Systems
Antecedent calculation:
Rule 1: RA1 = [A(x) B(y), A(x) B(y)]
Rule 2: RA2 = [C(x) D(y), C(x) D(y)]
where is a t-norm, generally min or prod
~
~
~
~
~
~
~
~

Interval Type-2 Fuzzy Systems
Consequent calculation:
Rule 1: G’1 = i..n[G1
(zi) RA1, G1(zi) RA1]
Rule 2: G’2 = i..n[G2
(zi) RA2, G2(zi) RA1]
~ ~
~ ~
~
~

Interval Type-2 Fuzzy Systems
Consequent combination:
Gc = i..n [G1’ (gi) V G2’
(gi) , G1’ (gi) V G2’
(gi) ]
Where V is a t-conorm, generally max
~ ~ ~ ~~
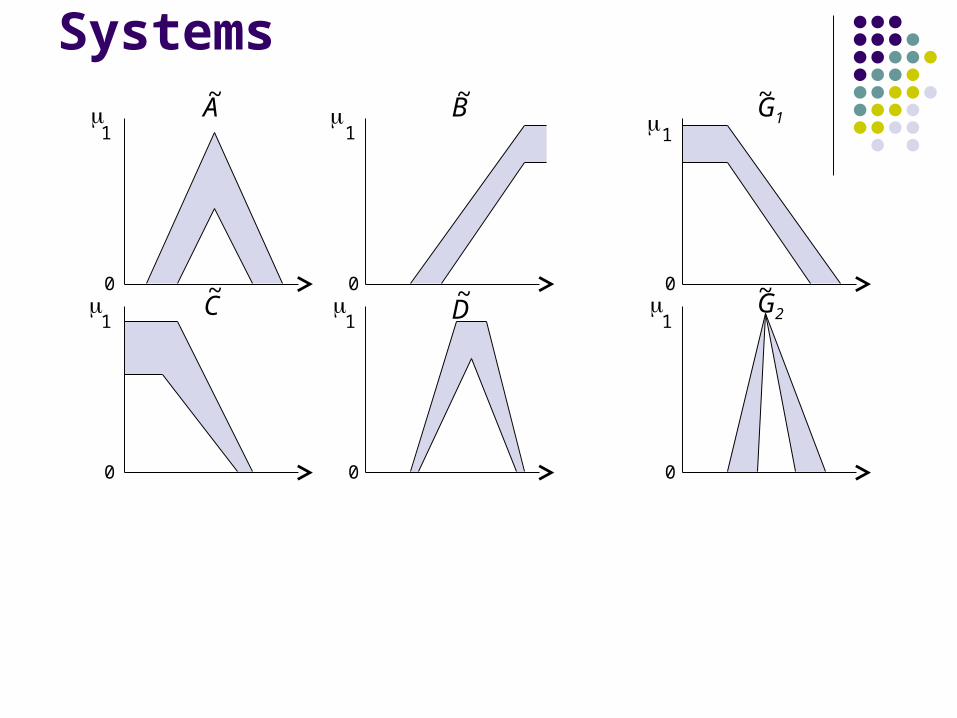
Interval Type-2 Fuzzy SystemsA
0
1
0
1
0
1
0
1
0
1
0
1
C
B
D
G1
G2~
~
~
~
~
~

Interval Type-2 Fuzzy Systems
x
0
1
0
1
0
1
0
1
0
1
0
1
y
A
C
B
D
G1
G2~
~
~
~
~
~
Interval Type-2 Fuzzy Systems
x
0
1
0
1
0
1
0
1
0
1
0
1(min)
y
A
C
B
D
G1
G2~
~
~
~
~
~

Interval Type-2 Fuzzy Systems
x
0
1
0
1
0
1
0
1
0
1
0
1(min)
y
A
C
B
D
G1
G2~
~
~
~
~
~

A
C
B
D~
~
~
~
Interval Type-2 Fuzzy Systems
x
0
1
0
1
0
1
0
1
0
1
0
1
0
1
(min)
y
max
Cl Cr
G1
G2~
~
GC
~

Interval Type-2 Fuzzy Systems
x
0
1
0
1
0
1
0
1
0
1
0
1
0
1
(prod)
y
0
1
max
Cl Cr
B
D~
~A
C~
~ G1
G2~
~
GC
~

Interval Type-2 Fuzzy Systems
Summary: Membership grades are crisp intervals Two parallel type-1 systems (up to defuzzification) Defuzzification in two stages:
Type-reduction (KM) Defuzzification

Generalised Type-2 Fuzzy Sets
Generalised type-2 fuzzy sets – type-1 fuzzy numbers for membership grades
X is primary domain Jx is the secondary domain A(x) is the secondary membership function
at x (vertical slice representation) All secondary grades (A(x,u)) [0,1]
A = {((x,u), A(x,u)) | x X, u Jx, Jx [0,1]}~
~
~
~

Generalised Type-2 Fuzzy Sets
Representation theorem (Mendel and John) Represent generalised type-2 fuzzy sets and
operations as collection of embedded fuzzy sets
Ae = {(x, (u, A(x,u)) | x X, u Jx, Jx [0,1]}~
~
A = Ae
~ ~ j
j = 1
n
Only used for theoretical working (to date)

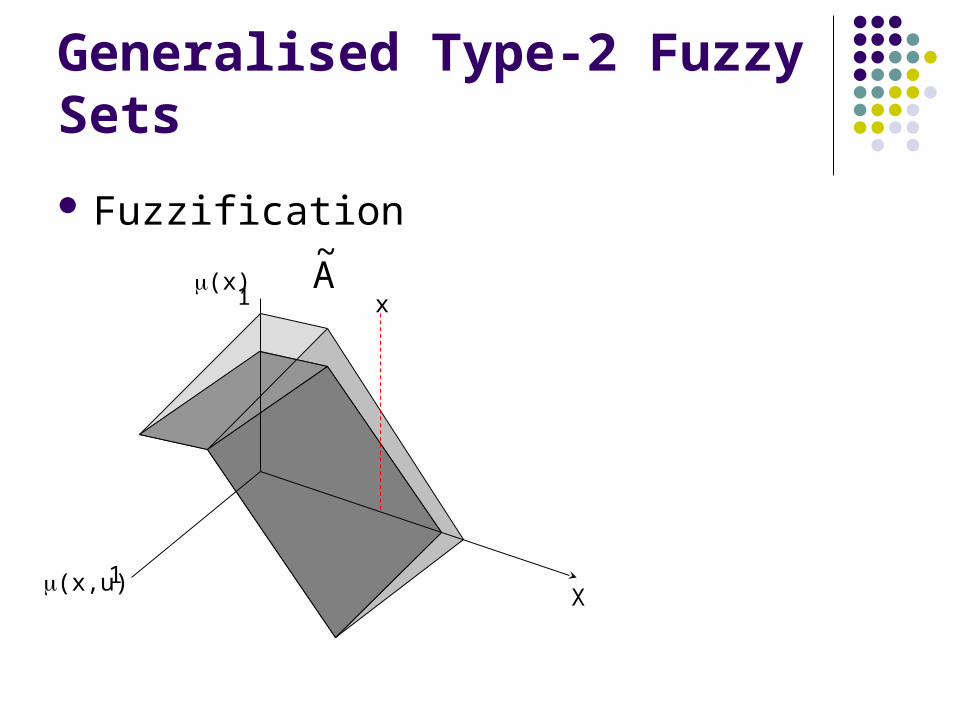
Generalised Type-2 Fuzzy Sets
Fuzzification
X(x,u)
(x)
1
1
~A
Generalised Type-2 Fuzzy Sets
Fuzzification
X(x,u)
(x)
1
1 x
~A

Generalised Type-2 Fuzzy Sets
Fuzzification
X(x,u)
(x)
1
1 x
~A

Generalised Type-2 Fuzzy Sets
Fuzzification
X(x,u)
(x)
1
1 x (x,u)
(x)1
1
~A ~A(x)

Generalised Type-2 Fuzzy Sets
Antecedent ‘and’ – the meet Two SMF’s: f = i / vi and g = j / wj
The meet:
f g = i j / vi wj
(Zadeh)
Generalised Type-2 Fuzzy Sets
Antecedent ‘or’ – the join Two SMF’s: f = i / vi and g = j / wj
The join:
f g = i j / vi V wj
(Zadeh)

Generalised Type-2 Fuzzy Sets
Join and meet under min:(x,u)
(x)1
1(x,u)
(x)1
1joinmeetf g

Generalised Type-2 Fuzzy Sets
Join and meet under prod:(x,u)
(x)1
1(x,u)
(x)1
1joinmeetf g

Generalised Type-2 Fuzzy Sets More efficient join and meet operations: Apex points 1 and 2
(x,u)
(x)1
1f g
1 2

Generalised Type-2 Fuzzy Sets More efficient join and meet operations:
f g (u) = f(u) Λ g(2), 1u<2
f(u) Λ g(u), u2
{f g (u) = f(1) Λ g(u), 1u<2
(f(u) V g(u)) Λ (f(1) Λ g(2)), u2
f(u) Λ g(u), u<1{ (f(u) V g(u)) Λ (f(1) Λ g(2)), u<1
(Karnik and Mendel), (Coupland and John)

Generalised Type-2 Fuzzy Sets
Implication: Meet every point in consequent with
antecedent value:
A(x) B(y) G = (A(x) B(y)) G(z)zZ
~~~ ~ ~ ~

Generalised Type-2 Fuzzy Sets
Combination of Consequents: Join all consequent sets at every point in the
in the consequent domain:
G = G1(z) G2
(z) … Gn(z)
zZ
~~ ~ ~

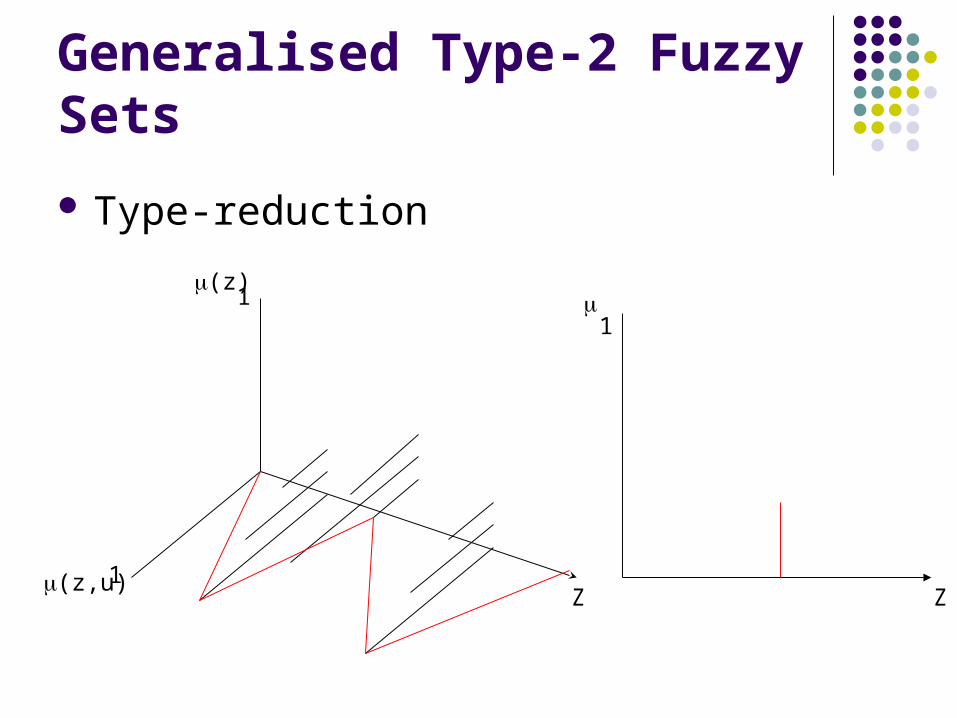
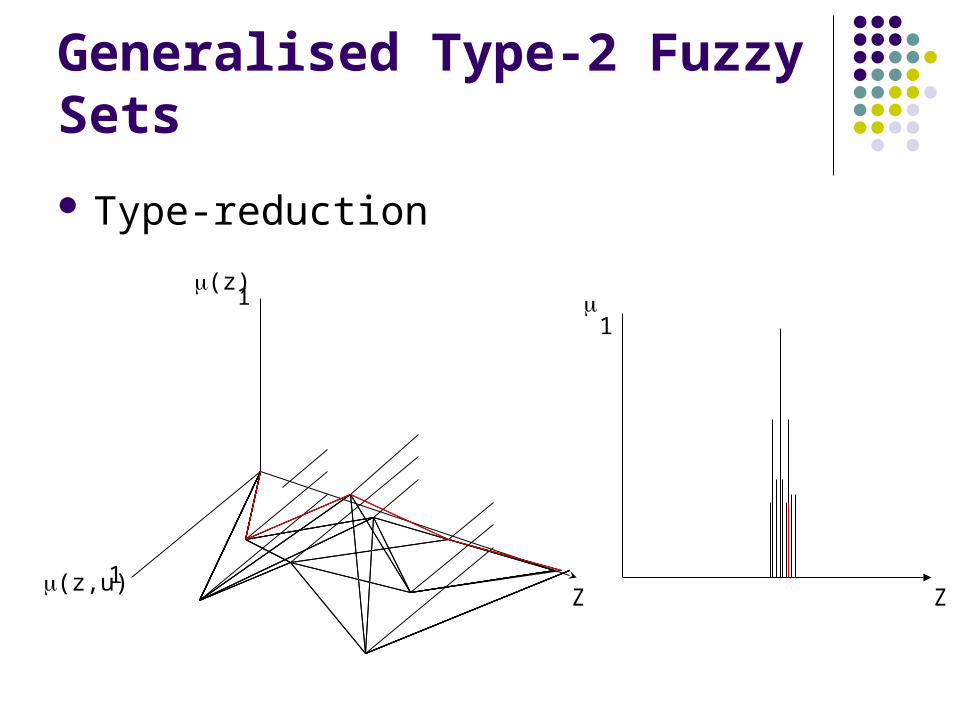
Generalised Type-2 Fuzzy Sets
Type-reduction (centroid) Gives a type-1 fuzzy set:
GC = 1Jz1… 1JzN
i=1 G(zii) /
i=1 zii
i=1 i
N
N
~N
(Karnik and Mendel)

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1
Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1
Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1

Generalised Type-2 Fuzzy Sets
Type-reduction
Z(z,u)
(z)
1
1
Z
1
CZ
CZ
Show again

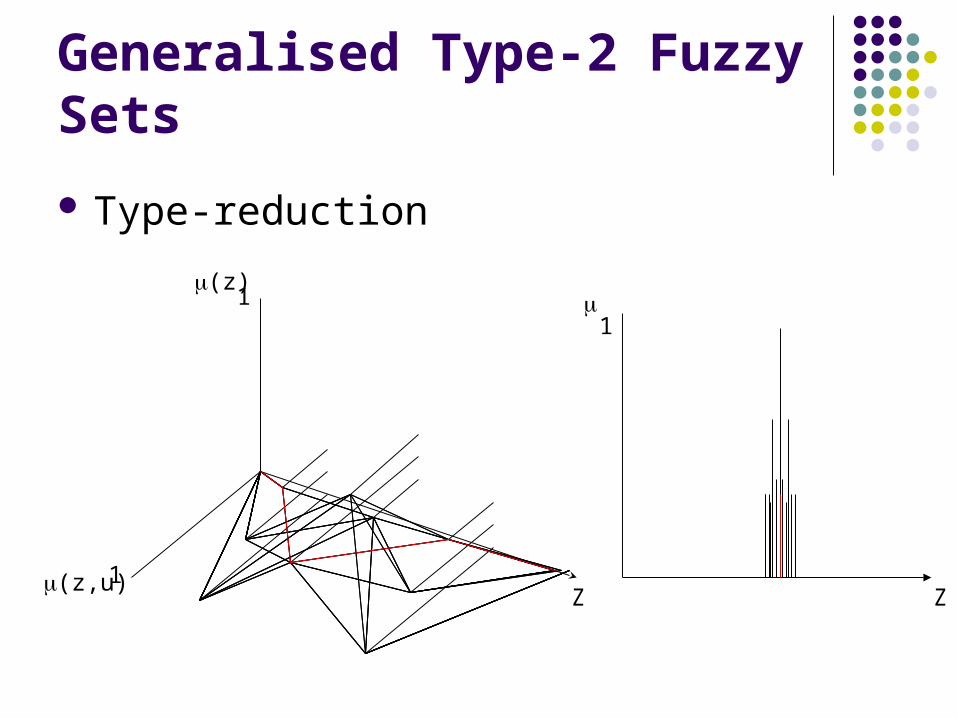
Generalised Type-2 Fuzzy Sets
Type-reduction – number embedded sets:

Generalised Type-2 Fuzzy Sets
Computational complexity is a huge problem Inference complexity relates to join and meet Type-reduction is not a sensible approach

Generalised Type-2 Fuzzy Sets
Geometric approach (Coupland and John): Model membership functions as geometric
objects Operations become geometric Run geometric model

Generalised Type-2 Fuzzy Sets
Let the generalised type-2 fuzzy set A consist of n triangles:
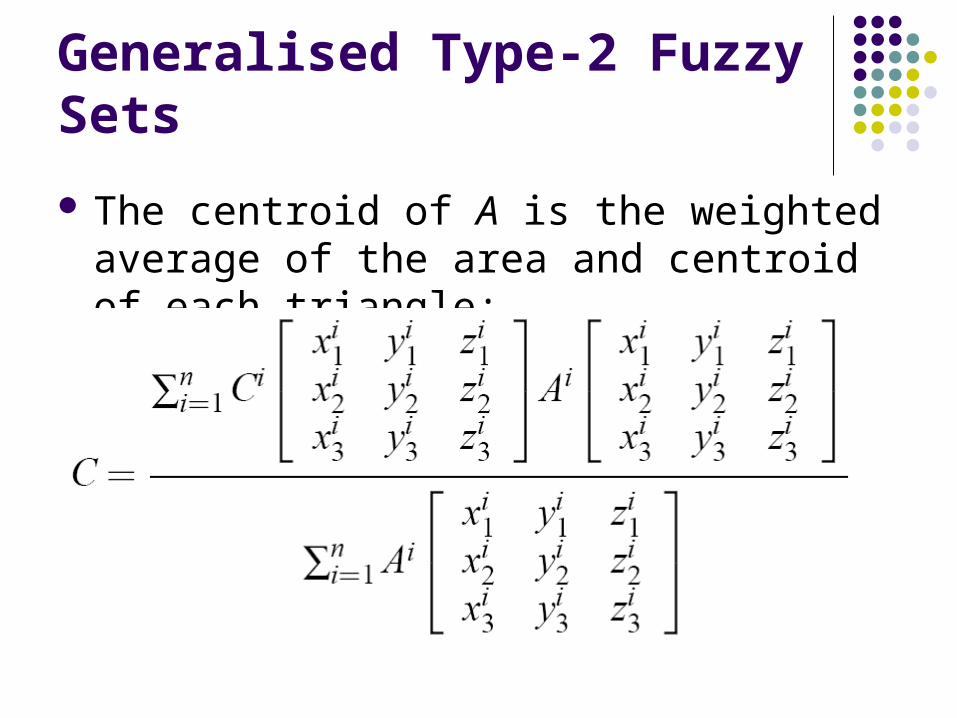
Generalised Type-2 Fuzzy Sets
The centroid of A is the weighted average of the area and centroid of each triangle:

Generalised Type-2 Fuzzy Sets
The centroid of a triangle is the mean of the x component of the three vertices
The area of a triangle is half the cross product of any two edge vectors

Generalised Type-2 Fuzzy Sets

Generalised Type-2 Fuzzy Sets

Generalised Type-2 Fuzzy Sets

Generalised Type-2 Fuzzy Sets
Criticisms: No ‘measure of uncertainty’ Problems with rotational symmetry
On the plus side: Computes in a reasonable time Interesting potential implementations

Generalised Type-2 Fuzzy Sets
Summary: Rich model – membership grades are fuzzy
numbers High computational complexity
Inference problems solved Type-reduction partly solved (geometric approach)
Generalised Type-2 Fuzzy Sets
Applications: Control:
Robot navigation (Hagras, Coupland, Castillo) Plant (Castillo, Chaoui, Hsiao)
Signal Processing: Classification (Mendel, John, Liang) Prediction (Rhee, Mendez, Castillo)
Perceptual reasoning: Perceptual computing (Mendel) Modelling perceptions (John)

Generalised Type-2 Fuzzy Sets Example Application: Robot control and navigation:

Generalised Type-2 Fuzzy Sets Example Application: Robot control and navigation:

Summary
Type-1 fuzzy sets can’t model uncertainty Interval type-2 fuzzy sets – crisp interval Generalised type-2 fuzzy sets – fuzzy set Interval systems fast, simple computation Generalised – high computational complexity Outperformed type-1 – growing applications

Further Reading
http://www.type2fuzzylogic.org/ Uncertain Rule-Based Fuzzy Logic Systems:
Introduction and New DirectionsMendel, J.M.
http://www.cse.dmu.ac.uk/~simonc/eldertech/ http://www.cci.dmu.ac.uk/
Related Documents











