Introduction Problem description TIBA Numerical results Conclusions An interval-based target tracking approach for range-only multistatic radar G.L. Soares † , A. Arnold-Bos , L. Jaulin , J.A. Vasconcelos † and C.A. Maia † † UFMG - Belo Horizonte-MG, CEP 31270-010, Brazil ENSIETA - 29806 Brest Cedex 9 - France GT MEA Meeting, July 2007 Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
IntroductionProblem description
TIBANumerical results
Conclusions
An interval-based target tracking approach forrange-only multistatic radar
G.L. Soares?†, A. Arnold-Bos?, L. Jaulin?,J.A. Vasconcelos† and C.A. Maia†
† UFMG - Belo Horizonte-MG, CEP 31270-010, Brazil? ENSIETA - 29806 Brest Cedex 9 - France
GT MEA Meeting, July 2007
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Main objective
WhatPresentation of TIBA, an interval approach to solve the problem ofmaneuvering target tracking, using range-only multistatic radar.
WhyThe radar process is plagued by several uncertainty sources thataffect directly the receivers’ measures. As a result, the radarsystem can be both imprecise and unreliable. Usually, intervalmethods handle uncertainty easily . . .
HowBy computation of the all feasible configurations for the targetwhich are consistent with the measures.
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Summary
1 Introduction
2 Problem description
3 TIBA
4 Numerical results
5 Conclusions
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Scenario
Radar applications
airspace monitoring, marine surveillance
weather prediction, ground imaging
Radar systems can face
noise in measurements
outliers, missing measures
. . . thus, the radar system can be unprecise and unreliable.
. . . then, we present TIBA as an alternative to traditional trackingalgorithms.
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms

IntroductionProblem description
TIBANumerical results
Conclusions
Scenario
Radar applications
airspace monitoring, marine surveillance
weather prediction, ground imaging
Radar systems can face
noise in measurements
outliers, missing measures
. . . thus, the radar system can be unprecise and unreliable.
. . . then, we present TIBA as an alternative to traditional trackingalgorithms.
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Scenario
Radar applications
airspace monitoring, marine surveillance
weather prediction, ground imaging
Radar systems can face
noise in measurements
outliers, missing measures
. . . thus, the radar system can be unprecise and unreliable.
. . . then, we present TIBA as an alternative to traditional trackingalgorithms.
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Scenario
Radar applications
airspace monitoring, marine surveillance
weather prediction, ground imaging
Radar systems can face
noise in measurements
outliers, missing measures
. . . thus, the radar system can be unprecise and unreliable.
. . . then, we present TIBA as an alternative to traditional trackingalgorithms.
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Problem description
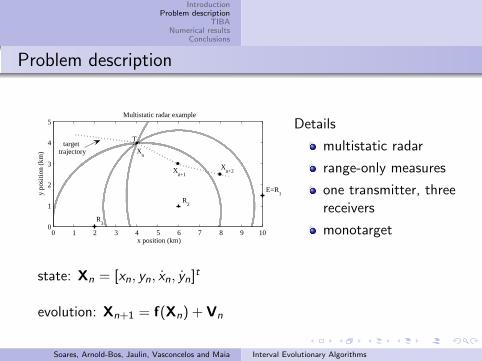
Multistatic radar example
x position (km)
y po
sitio
n (k
m)
E=R1
R2
R3
T
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
Xn
Xn+1
Xn+2
target trajectory
Details
multistatic radar
range-only measures
one transmitter, threereceivers
monotarget
state: Xn = [xn, yn, xn, yn]t
evolution: Xn+1 = f(Xn) + Vn
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Problem description
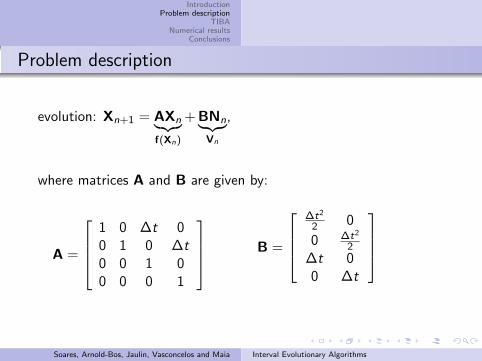
evolution: Xn+1 = AXn︸︷︷︸f(Xn)
+BNn︸︷︷︸Vn
,
where matrices A and B are given by:
A =
1 0 ∆t 00 1 0 ∆t0 0 1 00 0 0 1
B =
∆t2
2 0
0 ∆t2
2∆t 00 ∆t
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
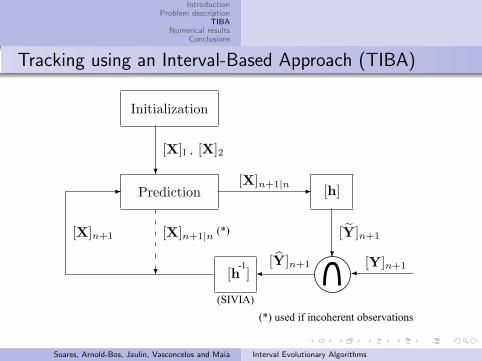
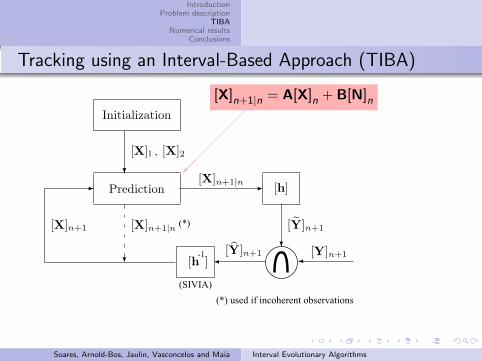
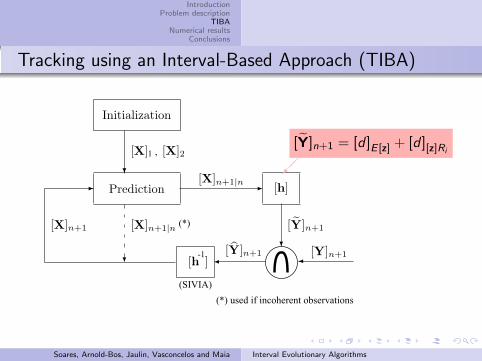
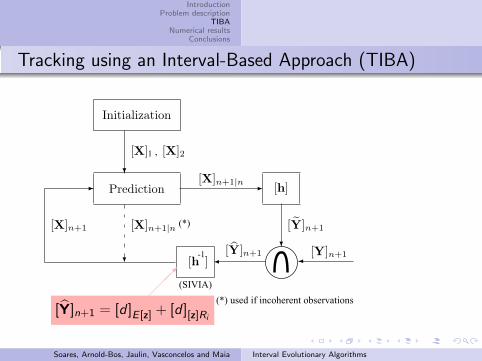
Tracking using an Interval-Based Approach (TIBA)
(SIVIA)
-1
(*)
(*) used if incoherent observations
,1
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
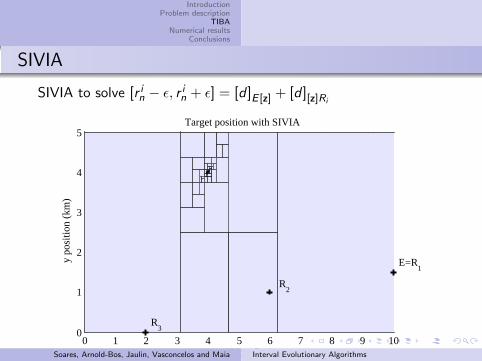
SIVIA
SIVIA to solve [r in − ε, r i
n + ε] = [d ]E [z] + [d ][z]Ri
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
x position (km)
y po
sitio
n (k
m)
Target position with SIVIA
E=R1
R2
R3
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
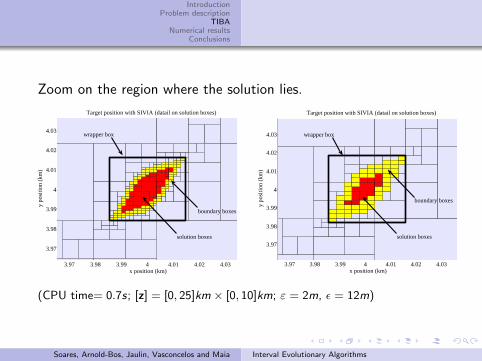
Zoom on the region where the solution lies.
3.97 3.98 3.99 4 4.01 4.02 4.03
3.97
3.98
3.99
4
4.01
4.02
4.03
x position (km)
y po
sitio
n (k
m)
Target position with SIVIA (datail on solution boxes)
wrapper box
boundary boxes
solution boxes
3.97 3.98 3.99 4 4.01 4.02 4.03
3.97
3.98
3.99
4
4.01
4.02
4.03
x position (km)
y po
sitio
n (k
m)
Target position with SIVIA (datail on solution boxes)
solution boxes
boundary boxes
wrapper box
(CPU time= 0.7s; [z] = [0, 25]km × [0, 10]km; ε = 2m, ε = 12m)
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
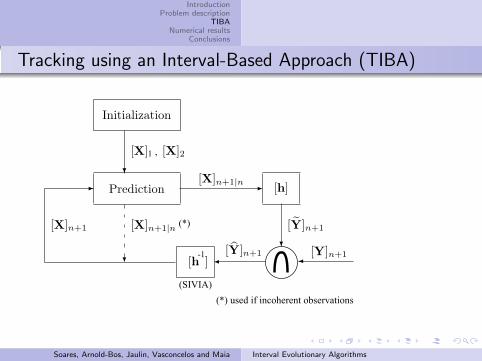
Tracking using an Interval-Based Approach (TIBA)
(SIVIA)
-1
(*)
(*) used if incoherent observations
,1
[X]n+1|n = A[X]n + B[N]n�
��
���
[Y]n+1 = [d ]E [z] + [d ][z]Ri
��
[Y]n+1 = [d ]E [z] + [d ][z]Ri
����
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Tracking using an Interval-Based Approach (TIBA)
(SIVIA)
-1
(*)
(*) used if incoherent observations
,1
[X]n+1|n = A[X]n + B[N]n�
��
���
[Y]n+1 = [d ]E [z] + [d ][z]Ri
��
[Y]n+1 = [d ]E [z] + [d ][z]Ri
����
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Tracking using an Interval-Based Approach (TIBA)
(SIVIA)
-1
(*)
(*) used if incoherent observations
,1
[X]n+1|n = A[X]n + B[N]n�
��
���
[Y]n+1 = [d ]E [z] + [d ][z]Ri
��
[Y]n+1 = [d ]E [z] + [d ][z]Ri
����
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Tracking using an Interval-Based Approach (TIBA)
(SIVIA)
-1
(*)
(*) used if incoherent observations
,1
[X]n+1|n = A[X]n + B[N]n�
��
���
[Y]n+1 = [d ]E [z] + [d ][z]Ri
��
[Y]n+1 = [d ]E [z] + [d ][z]Ri
����
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Experiments - simulation details
Trajectory generation
Yn = AXn + BWn,
Yn is Gaussian, mean 0 and σY = 4mWn is Gaussian, mean 0 and σW = 100m.s−2
delay between the observations: ∆t = 0.1
outliers and missing measures: 10%
sample: 1000 observations
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
Experiments - approaches details
TIBA
radar range: [0, 25]km × [0, 10]km
maximal error in measurements: ε = 12m
SIVIA’s accuracy: ε = 2m
interval noise: Nn = [−90, 90]
Particle filtering
particles: 1000
Regularization noise: [10, 10, 10, 10];
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
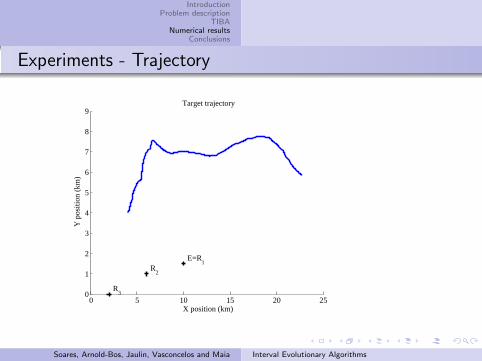
Experiments - Trajectory
0 5 10 15 20 250
1
2
3
4
5
6
7
8
9
X position (km)
Y p
ositi
on (
km)
Target trajectory
E=R1
R2
R3
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms

IntroductionProblem description
TIBANumerical results
Conclusions
Experiments - Observation example
0 100 200 300 400 500 600 700 800 900 100010
15
20
25
30
35
Iteration number
Dis
tanc
e (k
m)
Measured distance for receiver 3
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
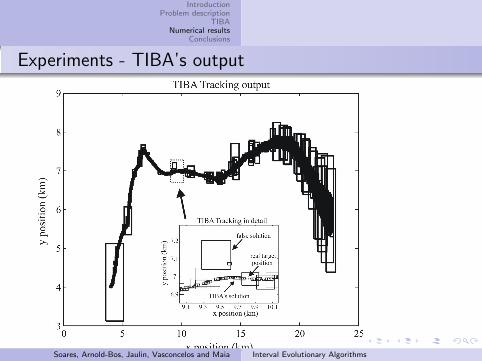
Experiments - TIBA’s output
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
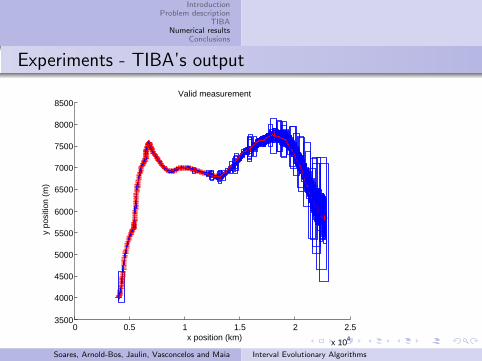
Experiments - TIBA’s output
0 0.5 1 1.5 2 2.5
x 104
3500
4000
4500
5000
5500
6000
6500
7000
7500
8000
8500Valid measurement
x position (km)
y po
sitio
n (m
)
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
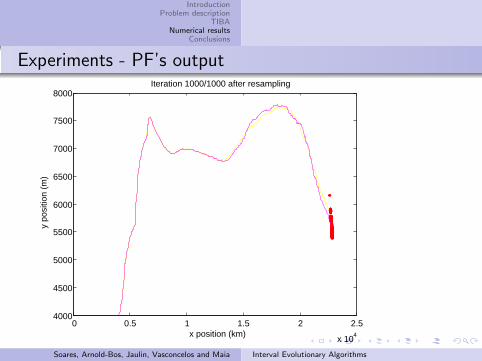
Experiments - PF’s output
0 0.5 1 1.5 2 2.5
x 104
4000
4500
5000
5500
6000
6500
7000
7500
8000Iteration 1000/1000 after resampling
x position (km)
y po
sitio
n (m
)
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
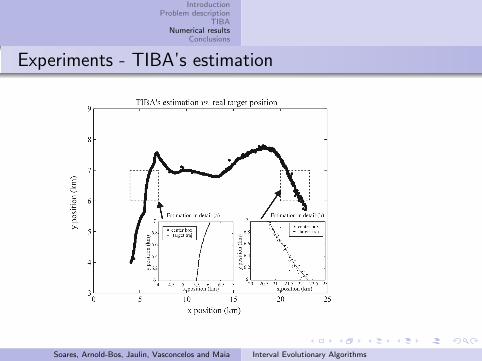
Experiments - TIBA’s estimation
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
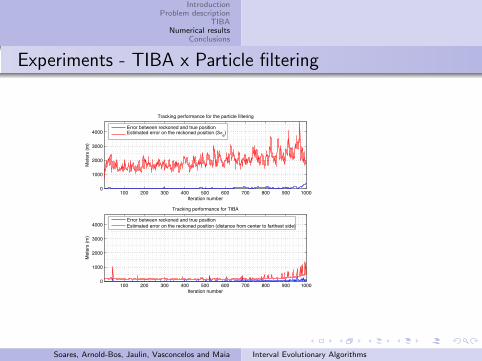
Experiments - TIBA x Particle filtering
100 200 300 400 500 600 700 800 900 10000
1000
2000
3000
4000
Tracking performance for the particle filtering
Iteration number
Mete
rs (
m)
Error between reckoned and true positionEstimated error on the reckoned position (3!
e)
100 200 300 400 500 600 700 800 900 10000
1000
2000
3000
4000
Tracking performance for TIBA
Iteration number
Mete
rs (
m)
Error between reckoned and true position
Estimated error on the reckoned position (distance from center to farthest side)
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
IntroductionProblem description
TIBANumerical results
Conclusions
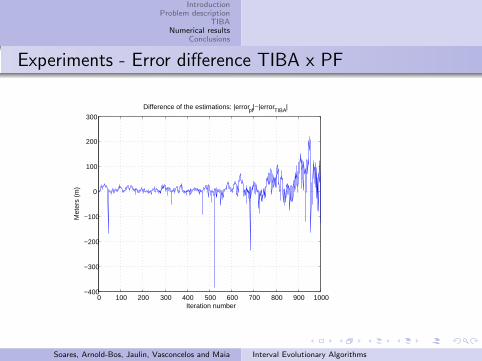
Experiments - Error difference TIBA x PF
0 100 200 300 400 500 600 700 800 900 1000−400
−300
−200
−100
0
100
200
300
Difference of the estimations: |errorpf|−|errorTIBA|
Iteration number
Met
ers
(m)
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms

IntroductionProblem description
TIBANumerical results
Conclusions
Conclusions
TIBA is a deterministic, interval-based technique while particlefiltering is a stochastic method. The experiments provide thefollowing comparison:
Criteria TIBA PFfast cpu time Xno parameter tuning Xconvergence X not guaranteedsmall maximal error Xgood estimation X X
Soares, Arnold-Bos, Jaulin, Vasconcelos and Maia Interval Evolutionary Algorithms
Related Documents