An Extended Kalman Filtering Approach with a Criterion to set its Tuning Parameters. Application to a Catalytic Reactor. Giuseppe Leu I and Roberto Baratti * Dip. Ingegneria Chimica e Materiali Universita' degli Studi di Cagliari Piazza D' Armi I-09123 Cagliari Italy Email: [email protected] Keywords Observer, EKF, Covariance Matrices, Catalytic Reactor (I) Present address: EniChem S.p.A. C.P. 281, I-09100 Cagliari, Italy (*) Correspondence should be addressed to R. Baratti

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

An Extended Kalman Filtering Approachwith a Criterion to set its Tuning
Parameters. Application to a CatalyticReactor.
Giuseppe LeuI and Roberto Baratti*Dip. Ingegneria Chimica e Materiali
Universita' degli Studi di CagliariPiazza D' Armi
I-09123 CagliariItaly
Email: [email protected]
Keywords
Observer, EKF, Covariance Matrices, Catalytic Reactor
(I) Present address: EniChem S.p.A. C.P. 281, I-09100 Cagliari, Italy
(*) Correspondence should be addressed to R. Baratti

Abstract
In this work, the problem of tuning Kalman filters is addressed. Such tuning usually
consists of finding the values of the model and measurements covariance matrices by trial
and error methods till satisfactory results have been obtained. Here, we propose a new
method to endow the model covariance matrix with physical meaning, enabling a more
systematic gain tuning procedure. Simulation examples for a simulated non isothermal
continuous reactor and for an experimental reactor where carbon monoxide oxidation takes
place are presented.

1
1. Introduction
In most industrial processes the complete state vector can seldom be measured and the
number of outputs is much lower than the number of states. In addition, the process
measurements are often corrupted by significant experimental errors, and the process itself is
subject to random, unmodelled upsets. Thus, without some consideration of these problems in
the total control system design, the measurements used for feedback control will often be
inadequate for acceptable control system performance. At present, on-line measurements are
only feasible for certain simple fundamental properties, while more sophisticated analyses are
not available on-line because of lack of instrument robustness and the need for special sample
propagation. Moreover, time-delayed analysis is in some cases the most important obstacle to
on-line implementation.
A way to overcome this difficulty is to infer the states from secondary measurements
(typically, temperature) by means of a dynamic on-line estimator. In chemical engineering, the
Extended Kalman Filter (EKF) is by far the most widely used estimation technique (c.f.,
Dochain and Pauss, 1988; Dimitratos et al., 1989, 1991; Ellis et al., 1994; Baratti et al., 1993,
1995; Yang and Lee, 1997; Crowley and Choi, 1998). Once the observability of the linear
approximation of the plant has been established, the construction of the estimator is a
straightforward task. However, the implementation of the EKF is still a procedure which
requires a significant amount of testing and tuning, as the EKF technique lacks convergence
criteria and systematic gain tuning procedures. Specifically, the tuning of the entries of the filter
covariance matrices relies heavily on trial-and error to achieve maximum likelihood state
estimation in control and optimization.
Several studies, mainly aimed at improving estimation algorithms, have been reported in the
literature. A Kalman filter modified to follow the changes in input forcing functions and noise
statistics for target tracking where the acceleration inputs and the noise statistics are unknown
was proposed by Moghaddamjoo and Kirlin (1989). The application of an adaptive EKF, which
employs continuous-time process models for dynamics, observation and covariance propagation
in combination with discrete-time equations for measurement update and gain computation, to
estimate the time evolution of the reacting mixture composition in a polymerisation reactor was
discussed by Dimitratos et al. (1989, 1991). Viel et al. (1992) proposed an exponentially
converging observer for a distillation column based on the structural properties of the
observability. To account for deviation of the model from the ideal condition of orthogonality
between the innovations process and past observations to state the target position, a modified
Kalman filtering algorithm with mismatch function was reported by Haykin and Li (1994).
Ahmed and Radaideh (1994) proposed a modified extended Kalman filter in terms of the actual
state and estimated state as a function of time and the integral-squared error as a function of
noise intensity both for dynamics and measurement noise. Zhou and Luecke (1995) presented a
procedure using observations with linear process to develop estimates for the effective values of
the covariance matrices of the process model and of the measurement errors. Finally, it is worth

2
mentioning the square-root algorithm which allows reliable computation of the state estimates
using, as far as possible, quantities obtained via orthogonal operations, discussed by Park and
Kailath (1995).
From the first papers on the EKF to the aforementioned studies, the EKF to be applied has
needed a significant set of experimental data and a time-consuming numerical minimization
procedure to tune the covariance matrices and to forewarn the divergence of the estimator. In
Baratti et al. (1993) it was shown that the implementation procedure is facilitated if the estimator
design is appropriately combined with knowledge, modeling, and experimental notions and
tools of the specific field of the plant. Along this line of thought, in this work we propose to
endow the model covariance matrix with physical meaning, enabling a more systematic gain
tuning procedure. The measurements covariance matrix is assessed either from the information
of the measurement instruments or from a standard test on the measured signals. As regards
modeling errors, it is assumed that: (I) the uncertainty arises from imprecision in a set of model
parameters, as determined from the physical knowledge of the particular plant; (II) the
erroneous model of the plant consists of the nominal model with a first-order Taylor series
expansion about the nominal parameters; and (III) the parameter errors are white noises with
zero mean, normal distribution with a constant covariance matrix that can be determined, and
possibly updated, from on-line data. From the perspective of the standard EKF technique, we
obtain a state-dependent varying covariance matrix with two parts, one state-dependent made of
the Jacobian of the plant model with respect to the model parameter errors, and one constant
related to the statistics of the parameter errors. While in the standard EKF approach estimator
tuning amounts to the "black-box" tuning of the entries of the error covariance, in the proposed
EKF approach the tuning amounts to the physically meaningful determination of the error
covariance of the modeling errors. As a by product, one also obtains an on-line modeling
assessment procedure, whose information can be used to verify or correct the plant modeling, a
possibility which is consistent with our unified framework for modeling and on-line estimation
problems.
The proposed method to estimate the process model and measurements covariances in an
EKF based observer was tested against a detailed model of a CSTR with by-pass, first and then
experimentally using the same experimental data obtained previously by Baratti et al. (1993).
2. Theory
For nonlinear systems described by ordinary differential equations the process model may
be formally described by:
x(t) = f(x ,u) + w (t) (1)
x(0) = x0 + w0 (2)
y(t) = h(x ,u) + v(t) (3)

3
where eqs (1) and (2) represent the nonlinear system state equations, and eq. (3) the nonlinear
measuring device. The process noises w(t), v(t) as well as the initial error w0 are assumed to
have zero mean and unspecified distributions.
Unfortunately, for nonlinear systems the conditional probability distributions for the states
evolving in time are not Gaussian even when w(t), v(t) and w0 are assumed to have Gaussian
distributions. This means that an infinite number of moments are required to determine the
distribution and that the moments are coupled in increasing order; i.e. the first moment depends
on the second, the second on the third, etc. This structure of the statistics means that
approximations must be made in order to obtain a computationally feasible filter.
In order to obtain the EKF, two approximations are made: an approximate second-order
statistic (mean and covariance) and an error propagation built on a Taylor first-order expansion
about the current estimates. For the first approximation the process noises, w(t) and v(t), are
Gaussian and uncorrelated in time as well as uncorrelated with the initial states.
The equations governing the continuous-discrete Extended Kalman Filter are reported in the
following (c.f., Ray, 1981; Gelb, 1988).
Propagation
x = f x ,u (4)
P(t) = Fx(x ,u) P(t) + P(t) FxT(x ,u) + Q(t) (5)
with I.Cs
x 0 = x 0 and P 0 = P0
Update
x + = x - + K y t - h x - (6)
P + = I - K t H x - P - (7)
where (-) and (+) indicate the estimation just before and just after the update, and with gain
matrix K defined as:
K = P(-) HxT(x - ) Hx(x - ) P(t) Hx
T(x - ) + R- 1 (8)
where x is the estimated state vector, Q(t) is the covariance matrix of the process noise and R is
the covariance matrix of the measurement errors. The matrices Fx and Hx are the Jacobians
with respect to the state vector, evaluated in the estimated values:
Fx(x(t), u) = ∂f(x(t), u)
∂x(t) x(t) = x(-)

4
Hx(x(-)) = ∂h(x(t))
∂x(t) x(t) = x(-)
As can be seen in eq. (6), the gain matrix K(t) corrects the model-based prediction using
the innovation error difference between the actual and the predicted measurements. It is worth
noting that the relative importance given to the model prediction and the actual measurement is
weighted by the error covariances Q and R, which are attributed to the model predictions and
measurements respectively.
Usually the error covariance matrices, Q and R, are regarded as tuning parameters, which
are evaluated through a trial-and-error procedure. We will call this procedure: standard EKF.
If we suppose that the errors in the hypothesis of perfect structural model are due only to
the experimental estimate of the parameters, the model-error description becomes:
x = f(x ,u,p) + Fp(x ,u) (p - p) + o(x ,u,p - p) (9)
where p is the experimental value of the parameters, p is the real unknown value of the
parameters, Fp is the Jacobian with respect to the parameters and o(x ,u,p - p) is the quadratic
and higher order terms in (p - p ), which we neglect. Thus the new additive error is given by:
w (x ,u,p - p) = Fp(x ,u) (p - p) (10)
The covariance matrix of the process noise, with these assumptions, becomes state and input-
dependent:
Q(x ,u,Qp) = Fp(x ,u) Qp F pT(x ,u) (11)
with Qp the experimental covariance matrix of the estimated parameters.
It is now necessary to evaluate Qp. The parameters are the solution of an unconstrained
minimum of some objective function φ(p, w) that depends on the data, in particular on the
measured values w of the random variables . At the minimum we have: ∂φ(p*,w)/∂p = 0, and
varying the data slightly ∂φ(p*+ δp*,w + δw )/∂p = 0. Expanding this equation in Taylor
series and retaining only terms up to first order:
∂2φ∂p2
δp*+ ∂2φ
∂p ∂w δw ≅ 0 (12)
so that approximately:
δp* = - H *- 1⋅∂2φ
∂p⋅ ∂w⋅δ w (13)
where H*= (∂2φ/∂p2)p = p * is the Hessian of the objective function with respect to the
parameters at the minimum.

5
The covariance matrix is defined by Qp ≡ E(δp*⋅δ p*T) and inserting the eq. (13) :
Qp ≈ E H*- 1 ∂2φ
∂p⋅∂ w ∂w ∂w
T
∂2φ
∂p⋅∂ w
T
H*- 1(14)
The second order derivatives are evaluated at the minimum; hence they are constant and can be
taken outside the expectation sign and the covariance matrix of the data is Qw ≡ E δw ⋅ δwT
. If
we have many experiments and we assume that the covariance matrix of the data is independent
experiment by experiment, the covariance matrix of the parameters becomes:
Qp ≈ H*- 1⋅
∂2φ
∂p⋅∂ w µ Qwµ
∂2φ
∂p⋅∂ w µ
T
∑µ=1
N
H*- 1(15)
This formula applies to any objective function, whether or not it has a basis in statistics. For
objective functions like sums of squares and log-likelihood for normal distributions, we can
write:
H ≈ 2 BµT Bµ∑
µ=1
N(16)
where Bµ ≡ ∂fµ/∂p, M p ≡ φ p , ≡ ∂ /∂M, with M moment matrix of the residuals
µ = pµ - pµ . Inserting eq. (16) and ∂2φ/∂p ∂w µ ≈ -2 BµT in eq. (15) we have:
Qp ≈ BmT B m∑
m=1
N - 1 B m
T Qm B m∑m=1
N B m
T B m∑m=1
N - 1(17)
For single equation least-squares, assuming observations with standard deviation σ, we have
Bµ = ∂fµ/∂p , = 1 and Qµ = σ2 , so that eq. (17) reduces to:
Qp ≈ σ2⋅∂fµ
∂p⋅
∂fµ
∂p
T
∑µ=1
N - 1
. (18)
The covariance matrix R (1x1) of the measurement errors is evaluated from the
experiments carried out to characterize the process by this equation (c.f., Bard, 1974;
Moghaddamjoo and Kirlin, 1989) :
R = (ϕi - ϕ)⋅(ϕi - ϕ)T∑
i =1
N
N-1 (19)
where is the vector of the measured states and N is the number of the experiments performed
and ϕ = ϕi∑µ=1
N/N .

6
Once the covariance matrix of the model parameters is computed, it is possible to derive the
covariance matrix of the model by using eq. (11), which, substituted in eq. (5), gives the
resulting Riccati equation:
P(t) = Fx (x ,u) P(t) + P(t) FxT(x ,u) + Fp(x ,u) Qp Fp
T(x ,u) (20)
The EKF so performed will be called a priori EKF.
3. Study Case
The a priori EKF was compared with the standard EKF, and their performances were
checked by comparison with the dynamic behavior of a reactor where a non isothermal reaction
takes place. In particular, two sets of experiments were carried out, the first simulated and the
second experimental.
3.1 Simulated case
In the first test case, the reactor was assumed to consist of a CSTR with 5% of by-pass on
the volumetric flow rate fed, see Figure 1, where a non isothermal reaction, described through
the Langmuir-Hinshelwood kinetic model, takes place, and assuming that the by-pass influences
only the concentration dynamics and not those of temperature.
The material and energy balances in dimensionless variables are:
dx1dt
= d1 d2 - x1 x2τc
- α x1 exp γ 1 - 1
x2
1 + σ x1 2(21)
dx2dt
= d3 bw + d2 bi - x2τT
+ β x1 exp γ 1 - 1
x2
1 + σ x12
(22)
where x1 = C / Cr is the dimensionless outlet reagent concentration, x2 = T / Tr is the
dimensionless reactor temperature and d1 = CiTi / CrTr, d2 = Ti / Tr and d3 = Tw / Tr are the
exogenous feed reagent concentration, inlet temperature and wall temperature, respectively.
The others variables are defined as follow:
α = K exp - ER Tr
, γ = ER Tr
, σ = Ka Cr , β = ω Cr αTr
, ω = -∆Hρ Cp
,
(23)
τc = Vq , τT = 1U S
ρ Cp V +
ρg Cpg qρ Cp V
, bw =
U Sρ Cp V
U Sρ Cp V
+ ρg Cpg qρ Cp V
, bi =
ρg Cpg qρ Cp V
U Sρ Cp V
+ ρg Cpg qρ Cp V
The dimensionless outlet concentration is given by:

7
x1,u = ε x1,i + 1 - ε x1 (24)
The parameters of the detailed model used to simulate reality are reported in Table 1, first
column.
The proposed model to be used to develop the EKF is a CSTR and its material and energy
balances in dimensionless variables are:
dx1,u
dt =
d1 d2 - x1,u x2
τc -
α x1,u exp γ 1 - 1x2
1 + σ x1,u 2 (25)
dx2dt
= d3 bw + d2 bi - x2τT
+ β x1,u exp γ 1 - 1
x2
1 + σ x1,u2
(26)
The dynamic parameters in both models have the same expression but, in this case, the apparent
volume, Va, replaces the geometric volume, V.
The dynamic and kinetic parameters were evaluated following the same procedure used in
the previous work by Baratti et al. (1993). The concentration and temperature dynamic
parameters of the reactor were evaluated with a standard step response analysis, in the absence
of reaction, and the results obtained are reported in Table 1, second column. It is worth noting
that the dynamic parameters of the temperature are the same as reality; this is due to the fact that
the by-pass does not influence the temperature dynamics, as already mentioned, and for this
reason the global heat exchanger coefficient US is unchanged. The kinetic parameters, reported
in Table 1, second column, are evaluated through a fitting procedure of the experimental reaction
rates, obtained under isothermal (453, 463, 473 K), steady-state conditions for various values of
the reagent inlet concentration (0.008, 0.016, 0.04, 0.06, 0.08 mole fraction). It can be seen that
the activation energy, γ, and the absorption factor, σ, are about the same as those of reality , and
only the specific reaction rate, α, is different. This is because the residence time in the model is
shorter than in reality, so to achieve the same reaction rate a higher specific reaction rate is
necessary.
From the experiments carried out to characterize the reactor model, we can compute the
covariance matrices of the kinetic and concentration dynamic parameters. It is worth noting that,
in this case, the covariance matrix of the temperature dynamics is useless because of the lack of
influence of the by-pass.
3.2 Experimental case
The experimental data sets and the model are the same as those used in a previous work
(Baratti et al., 1993) where a detailed description of the equipment, schematized in Figure 2, and
how the model was derived can be found. Here, it is enough to say that the reactor was a
cylindrical chamber of 63 10-6 m3 within which a complex flow pattern was realized. About 14
catalyst pellets, 1.6 10-3 m in diameter and with porosity of 0.37 (commercial platinum catalyst,

8
supported on alumina with a platinum load of 0.375 % on weight basis), were placed in a small
basket hanging at about half-way through.
The reactor was also equipped with an external cooling-heating jacket that allowed quite
accurate control of the reactor wall temperature. This was used as forcing function to track a
prescribed reference trajectory.
The carbon monoxide and oxygen flowrates were kept constant in time within a ± 2%
error; all the reaction experiments were carried out in excess of oxygen. The reactor was
supplied with a continuous nondispersive infrared (IR) carbon dioxide analyzer that provided
the on-line CO outlet concentration measurements to be used as comparison for the nonlinear
observers.
The parameter values of the model used, eqs (25) and (26), are reported in Table 2.
4. Results and Discussion
As mentioned in the above Section different experiments was used to derive the model
parameters in the two cases studied. In particular, step response analysis in absence of reaction
was used to estimate the concentration dynamic parameter (τc) and temperature dynamic
parameters (be, bw, τT), while isothermal steady state experiments at different inlet compositions
were used to estimate the kinetic parameters (α, σ, γ). Because of the method used to
characterize the model, the covariance matrix of the parameters has this structure:
Qp = Qk 0 00 QCd 00 0 QTd
(27)
where Qk, QCd and QTd are respectively the covariance matrices of the kinetic, concentration
dynamic and temperature dynamic parameters computed by means of eq. (18). The matrices Qk
and QTd are square with 3 rows and 3 columns; the matrix QCd is a scalar. The dependence of
the material and energy balances on the kinetic and dynamic parameters is shown by:
Fp =
∂f1
∂α∂f1
∂γ∂f1
∂σ∂f1
∂τC0 0 0
∂f2
∂α∂f2
∂γ∂f2
∂σ0
∂f2
∂τT
∂f2
∂bw
∂f2
∂bw
(28)
where f1 is the material and f2 is the energy balance.
4.1 Simulated case.
In the first case study, simulated reactor, since the covariance matrix of the temperature
dynamics parameters, QTd, is useless because of the lack of influence of the by-pass on the
reactor temperature, eqs (27) and (28) become respectively:

9
Qp = Qk 00 QCd
(29)
Fp =
∂f1
∂α
∂f1
∂γ
∂f2
∂α
∂f2
∂γ
∂f1
∂σ
∂f1
∂τc
∂f2
∂σ0
(30)
The values for the experimental covariance matrix of the estimate parameters, QP, are reported in
Table 3. Moreover, we assumed that the errors in the temperature measurements are evaluated as
a pseudo-random number varying in the range ± 0.05K. The covariance matrix of the error
measurements for only one measured variable becomes a variance and its value is R = 3.91 10-9
for the dimensionless temperature.
The covariance matrices of the standard EKF were evaluated from the minimum least-
squares criterion (c.f., Baratti et al., 1993) where the minimization function is given by the
square of the error between the reagent outlet concentration values estimated by the EKF
algorithm and the experimental ones. In order to mimic real industrial situations, where
dynamics experiments are expensive, only a simple dynamic experiment was performed, whose
results are not reported here for sake of brevity. In particular, a step change in the wall
temperature (from 455 K to 470 K) was applied while the inlet reactant concentration was set
equal to 0.03 and kept constant throughout the entire simulations. The obtained values of the
covariance matrices, Q, reported in Table 4, first column, were kept constant for all the
experimental runs illustrated below.
In the first experiment, the reactor wall temperature (dashed line) was changed as shown in
Figure 3a, where the reactor temperature (continuous line) exceeds the range of values explored
in the steady-state experimental analysis (i.e. 453 < T < 473K), while the inlet reagent molar
fraction was set at 0.013 and kept constant through the entire simulation.
In order to illustrate the advantages of using an estimator, it is a good idea first to
investigate the performance of the model alone in the absence of measurements, which means
considering the model prediction as obtained by directly integrating the model equations, eqs
(25) and (26). The results obtained (continuous curve) are compared, in Figure 3b, with the real
ones (dotted curve) in terms of the ratio between the reactant mole fractions in the outlet and
inlet streams. It can be seen that the quantitative agreement is rather poor and justifies the need
for an estimator. In Figures 3c and 3d the performance of the standard and the a priori EKF
estimator is shown as a comparison between the predicted (continuous line) and real (dotted
line) outlet reactant mole fraction values respectively. From these Figures it is possible to note
that the agreement is quite good for both the EKFs developed. Moreover, the results obtained
with the two EKFs are almost identical, thus indicating the possibility that the structure of the
10
model describes reality very well and that the errors are due only to the kinetic and dynamic
parameters.
In the second experiment, the inlet reagent mole fraction was set at 0.060 and, again, kept
constant throughout the entire simulation, while the reactor wall temperature (dashed line), see
Figure 4a, follows the same path described in the first experiment. Again the performance of the
model, Figure 4b, standard EKF, Figure 4c, and a priori EKF, Figure 4d, is examined. As
expected, only the two EKF estimators are able to follow quantitatively the behavior of the
simulated outlet reactant concentration, while the agreement of the model is rather poor.
It is worth stressing that the good results obtained with the a priori EKF are limited to the
case where the model errors are due only to the experimental estimate of the parameters.
4.2 Experimental case.
In the second case studied, a comparison between the standard EKF and the a priori EKF
was performed on the same experimental data sets used by Baratti et al. (1993). In this case the
model parameters covariance matrix is defined by eq. (27), since the covariance matrices of the
kinetic, concentration dynamic and temperature dynamic parameters are different from zero, i.e.
all the model parameters are not perfectly known. The values of the model covariance matrix,
QP, are reported in Table 5, while the values of the model covariance matrix, Q, the same as
those used by Baratti et al. (1993), are reported in Table 4.
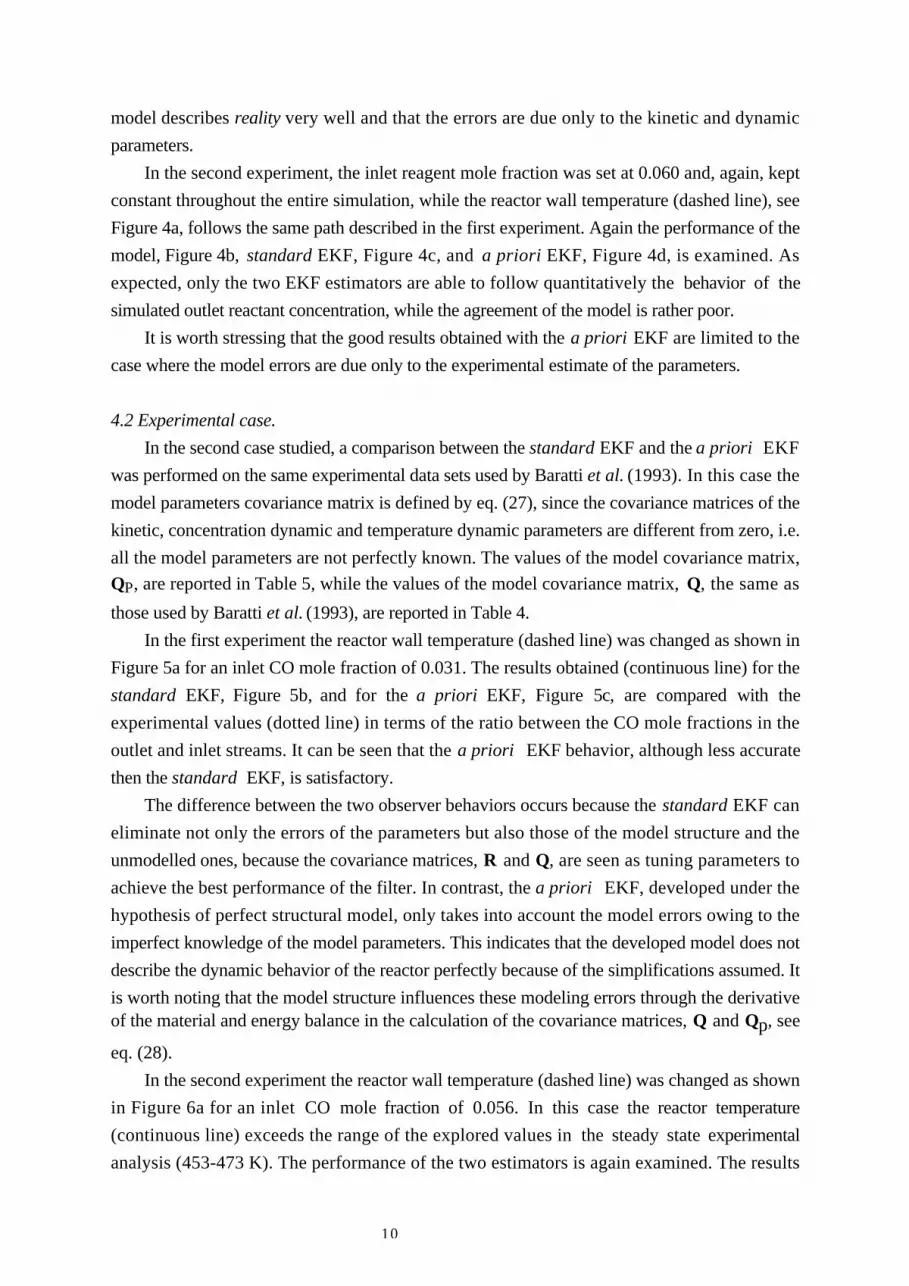
In the first experiment the reactor wall temperature (dashed line) was changed as shown in
Figure 5a for an inlet CO mole fraction of 0.031. The results obtained (continuous line) for the
standard EKF, Figure 5b, and for the a priori EKF, Figure 5c, are compared with the
experimental values (dotted line) in terms of the ratio between the CO mole fractions in the
outlet and inlet streams. It can be seen that the a priori EKF behavior, although less accurate
then the standard EKF, is satisfactory.
The difference between the two observer behaviors occurs because the standard EKF can
eliminate not only the errors of the parameters but also those of the model structure and the
unmodelled ones, because the covariance matrices, R and Q, are seen as tuning parameters to
achieve the best performance of the filter. In contrast, the a priori EKF, developed under the
hypothesis of perfect structural model, only takes into account the model errors owing to the
imperfect knowledge of the model parameters. This indicates that the developed model does not
describe the dynamic behavior of the reactor perfectly because of the simplifications assumed. It
is worth noting that the model structure influences these modeling errors through the derivativeof the material and energy balance in the calculation of the covariance matrices, Q and Qp, see
eq. (28).
In the second experiment the reactor wall temperature (dashed line) was changed as shown
in Figure 6a for an inlet CO mole fraction of 0.056. In this case the reactor temperature
(continuous line) exceeds the range of the explored values in the steady state experimental
analysis (453-473 K). The performance of the two estimators is again examined. The results

11
obtained show that both the standard EKF, Figure 6b, and the a priori EKF, Figure 6c, behave
similarly and that the larger deviations from the experimental behavior are attained where the
maximum temperature value is reached.
4.3 Robustness of the proposed method
One of the problems that could arise when implementing an estimator on-line is the
selection of the initial conditions to be assigned to the estimator algorithm. In fact, while the
actual concentration in the reactor could only be roughly estimated, the temperature is well
known since temperature measurements are available in real time.
In order to test the robustness of the proposed method, when errors in the estimate of the
initial reactor conditions are present, several runs were performed by changing the values of the
initial states, reactor temperature and concentration, for the simulated case. For all the tested
cases, both the estimators were able to recover the initial errors in a few minutes.
Here, for sake of brevity, the performance of the standard and a priori EKF is reported for
the case of no initial temperature errors and with an error equal to +/- 50% in the estimation of
the initial reactor concentration. In this experiment, the inlet reagent mole fraction was set at
0.060 and, again, kept constant throughout the entire simulation, while the reactor wall follows
the same path described in the first experiment (see Fig. 3a). The results obtained show that
both the a priori EKF, Figure 7a, and the standard EKF, Figure 7b, behave similarly and after 5
minutes are able to recover the initial errors.
5. Conclusions.
A procedure to estimate the process model and measurements covariance matrices in an
EKF based observer was developed and its performance evaluated through simulated and
experimental test cases. This procedure is based on the two following hypotheses: perfect
model structure, which means that the model errors are only due to the evaluation of the model
parameters, and Gaussian distributions of the errors.
In the standard EKF the covariance matrices, R and Q, are seen as tuning parameters to
achieve the best performance of the filter. To achieve this target it is necessary to carry out
dynamic experiments and a trial-and-error procedure has to be implemented. This method may
be time-consuming and expensive in industrial situations because of the dynamics experiments
necessary.
The improvement in the a priori EKF is that the covariance matrices, R and Q, are linked
to the knowledge, modeling and experimental skills of the specific process. In this proposed
method to develop an EKF, the tuning of the covariance matrices amounts to the physically
meaningful determination of the errors through the constant covariance matrices, determined by
the few experiments necessary to characterize the plant model, and through the Jacobian of the
plant model with respect to the parameters. The Jacobian represents the physically meaningful

12
influence of the errors and the constant covariance matrices represent the probabilistic nature of
the tests. The experimental probabilistic part of the filter forces the theoretical plant modeling to
reproduce the real plant behavior step by step. In this way we obtain an on-line modeling
assessment procedure whose information can be used to verify or correct the plant modeling
during runs.
From the reported results it can be stated that with a simplified plant model, but based on
the description of the physicochemical phenomena involved and, therefore, representing the
functional dependence among the various physical variables concerned, the a priori EKF can
infer usefully the states of the process from the available measurements. In the case of an
imperfect model, as in the experimental case shown, the performance of the a priori EKF is
satisfactory, especially if we consider that it is achieved without dynamics experiments.
Finally, the proposed method presents an advantage with respect to the standard method
when applied in industrial life. This is because, the a priori EKF does not need any further
dynamic experiments, which are time consuming and expensive, to tune the covariance matrix.
Acknowledgement
We would like to thank Prof. Jesus Alvarez for his helpful discussion and suggestions.

13
Notation.
bi inlet temperature gain constant
bw wall temperature gain constant
C concentration, mol m-3
Cr reference concentration (=1.053 mol m-3)
Cp specific heat capacity, kJ kg-1 K-1
E activation energy, kJ mol-1
f state transition vector
F Jacobian matrix of the state transition vector
h measurement function vector
H Jacobian matrix of the measurement function vector
k pre-exponential factor of the reaction rate constant, s-1
Ka adsorption constant, m3 mol-1
K Kalman filter gain matrix
I identity matrix
p parameters vector
P covariance matrix
q volumetric flow rate, m3 s-1
Q model error covariance matrix
R measurement error covariance matrix
R gas constant, J mol-1 K-1
S heat exchange surface area, m2
t time, s
T temperature, K
Tr reference temperature (=463 K)
U heat transfer coefficient, J m-2 s-1 K-1
u input vector
v measurement error vector
V reactor volume, m3
Va apparent reactor volume, m3
x state vector
y measurement vector
w process noises vector
Greek letters
α = k exp[ - E / (R Tr)], s-1
β = ω Cr α / Tr , s-1
γ dimensionless activation energy [ = E / (R Tr)]

14
ε by-pass fraction
∆H reaction heat, J mol-1
ρ density, kg m-3
σ dimensionless adsorption constant, ( = Ka Cr)
τc concentration time constant, s
τT temperature time constant, s
ω = - ∆H / ρ Cp, K m3 mol-1
Subscripts
i reactor inlet
g gas state
p parameters vector
u reactor outlet
x states vector
w reactor wall
0 initial conditions

15
References.
Ahmed, N.U. and Radaideh, S.M., 1994, Modified extended Kalman filtering, IEEE Trans.
Autom. Control, 39, pp 1322-1326.
Baratti, R., Alvarez, J. and Morbidelli, M., 1993, Design and experimental verification of a
nonlinear catalytic reactor estimator, Chem. Engng. Sci., 48, pp 2573-2585.
Baratti, R., Bertucco, A., Da Rold, A. and Morbidelli M., 1995, Development of a Composition
Estimator for Binary Distillation Columns. Application to a Pilot Plant, Chem. Engng. Sci., 50,
pp 1541-1550.
Bard, Y., 1974, Nonlinear Parameter Estimation, Academic Press, New York.
Crowley, T. J. and Choi, K. Y., 1998, Experimental Studies on Optimal Molecular Weight
Distribution Control in a Batch-free Radical Polymerization Process, Chem Engng. Sci., 53, pp
2769-2790.
Dimitratos, J., Georgakis, C., El-Aasser, M.S. and Klein, A., 1989, Dynamic modeling and state
estimation for emulsion copolymerization reactor, Comp. Chem. Engng., 13, pp 21-33.
Dimitratos, J., Georgakis, C., El-Aasser, M.S. and Klein, A., 1991, An experimental study of
adaptive Kalman filtering in emulsion copolymerization, Chem. Engng. Sci., 46, pp 3203-3218.
Dochain, D. and Pauss, A., 1988, On-line Estimation of a Microbial Specific Growth-rates: an
Illustrative Case Study, Can. J. Chem. Engng, 66, pp 626-631.
Ellis, M.,Taylot, T.W., and Jensem, K., 1994, On-line Molecular Weight Distribution
estimation and Control in a Batch polymerization, Am. Inst. Chem Engng. J., 40, pp 445.
Gelb, A., 1988, Applied Optimal Estimation, The M.I.T. Press, Cambridge.
Haykin, S. and Li, L., 1994, Modified Kalman filtering, IEEE Trans. Signal Process., 42, pp
1239-1242.
Moghaddamjoo, A. and Kirlin, R.L., 1989, Robust adaptive Kalman filtering with unknown
inputs, IEEE Trans. Acoust. Speech Signal Process, 37, pp 1166-1175.

16
Park, P. and Kailath, T., 1995, New square-root algorithms for Kalman filtering, IEEE Trans.
Autom. Control, 40, pp 895-899.
Ray, W.H., 1981, Advanced Process Control, McGraw-Hill, New York.
Viel, F., Bossanne, D., Busvelle, E., Deza, F. and Gauthier, J.P., 1992, A new methodology to
design extended Kalman filters: application to distillation columns, Proceedings of the 31st
IEEE Conference on Decision and Control, Tucson, AZ, USA, 16-18 Dec., 3, pp 2594-2592.
Yang, D. R and Lee K. S., 1997, Monitoring of a Distillation Column Using Modified
Extended Kalman Filter and a Reduced Order Model, Comp. Chem. Engng., 21, pp S565-
S570.
Zhou, J. and Luecke, R.H., 1995, Estimation of the covariances of the process noise and
measurement noise for a linear discrete dynamic system, Comp. Chem. Engng., 19, pp 187-195.

Tables
Table 1: Model parameter values for the simulated case.
Reality Simulated
τc, s 42.1 41.44
τT, s 187.5 187.5
bw 0.9375 0.9375
bi 0.0625 0.0625
ρ Cp, J K-1 m-3 60000 57915.06
US, J K-1 s-1 0.024 0.024
V, m3 80 10-6 82.88 10-6
α, s-1 0.01484 0.02241
γ 20.0 19.97
σ 3.0 2.977
Table 2: Model parameter values for the experimental case.
τc, s 26
τT, s 125
bw 0.934
bi 0.066
ρ Cp, J K-1 m-3 59200
US, J K-1 s-1 0.0238
Va, m3 54 10-6
α, s-1 1.2 106
γ 16.72
σ 2.993
Table 3: Simulated case: covariance matrix, Qp.
0.0876 -21.0738 8.597 0.0
-21.0738 80505.54 -222.8 0.0
8.597 -222.8 995.36 0.0
0.0 0.0 0.0 0.29

Table 4: Covariance matrices
Simulated Experimental
q11 6.76 10-2 0.115
q12 -7.96 10-4 0
q22 8.5 10-6 0.91 10-5
Table 5: Experimental case: parameters covariance matrix, Qp.
0.171 5.997 5.326 0.0 0.0 0.0 0.0
5.997 1775.571 197.41 0.0 0.0 0.0 0.0
5.326 197.41 168.473 0.0 0.0 0.0 0.0
0.0 0.0 0.0 1.147 0.0 0.0 0.0
0.0 0.0 0.0 0.0 72736.88 18.028 -23.474
0.0 0.0 0.0 0.0 18.028 1.028 -1.689
0.0 0.0 0.0 0.0 -23.474 -1.689 2.778

Captions for Figures
Figure 1.
CSTR reactor for the simulated case: (a) reality; (b) modeled.
Figure 2.
Sketch of the experimental apparatus.
Figure 3.
Analysis of the observer performance, simulated case (inlet CO mole fraction equal to 0.013):
(a) enforced wall temperature (dashed line) and reactor temperature (continuous line) as a
function of time; (b) comparison between experimental (dotted line) and (b) model process; (c)
standard EKF; (d) a priori EKF estimated values of the reactor outlet reagent concentration.
Figure 4.
Analysis of the observer performance, simulated case (inlet CO mole fraction equal to 0.060):
caption as Figure 2.
Figure 5.
Analysis of the observer performance, experimental case (inlet CO mole fraction equal to
0.031): (a) enforced wall temperature (dashed line) and reactor temperature (continuous line) as
a function of time; comparison between experimental (dotted line) and (b) standard EKF; (c) a
priori EKF estimated values of the reactor outlet reagent concentration.
Figure 6.
Analysis of the observer performance, experimental case (inlet CO mole fraction equal to
0.056): caption as Figure 4.
Figure 7.
Analysis of the observer performance, error in the initial reactor concentration (experimental
conditions as in Figure 3): a) a priori EKF; b) standard EKF.

YT
Yi
Ti
Yi
T
Yu
T
V VaYi
Ti
Yu
T
(a) (b)
Roberto Baratti
Fig 1

63 45
1 - 2 THERMOCOUPLES3 COOLANT INLET4 GAS INLET5 GAS OUTLET6 COOLANT OUTLET
1
2
REACTOR
N2
CO
O2
IRANALYZER
Roberto Baratti
Fig 2

450
460
470
480
490
500
Tem
pera
ture
, K
(a)
0.5
0.6
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(b)
0 50 100 150 200
Time, min
0.5
0.6
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(c)
0 50 100 150 200
Time, min
0.5
0.6
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(d)
Roberto Baratti
Fig 3

450
460
470
480
490
500
Tem
pera
ture
, K
(a)
0.9
0.92
0.94
0.96
0.98
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(b)
0 50 100 150 200
Time, min
0.9
0.92
0.94
0.96
0.98
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(c)
0 50 100 150 200
Time, min
0.9
0.92
0.94
0.96
0.98
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(d)
Roberto Baratti
Fig 4

0 2 4 6 8 10 12 14
Time, min
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(c)
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(b)
440
460
480
Tem
pera
ture
, K
(a)
Roberto Baratti
Fig 5

0 5 10 15 20 25 30
Time, min
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(c)
0.7
0.8
0.9
1.0
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(b)
460
480
500
Tem
pera
ture
, K (a)
Roberto Baratti
Fig 6

0.0 0.5 1.0 1.5 2.0 2.5 3.0
Time, min
0.5
1.0
1.5
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(b)
0.5
1.0
1.5
Mol
e Fr
actio
n R
atio
, Yu/Y
i
(a)
Roberto Baratti
Fig 7
Related Documents