An exact hybrid method for the vehicle routing problem with time windows and multiple deliverymen Aldair ´ Alvarez, Pedro Munari Industrial Engineering Department, Federal University of S˜ ao Carlos, Rodovia Washington Lu´ ıs - Km 235, CEP: 13565-905, S˜ ao Carlos-SP, Brazil [email protected], [email protected] Abstract The vehicle routing problem with time windows and multiple deliverymen (VRPTWMD) is a variant of the vehicle routing problem with time windows in which service times at customers depend on the number of deliverymen assigned to the route that serves them. In particular, a larger number of deliverymen in a route leads to shorter service times. Hence, in addition to the usual routing and scheduling decisions, the crew size for each route is also an endogenous decision. This problem is commonly faced by companies that deliver goods to customers located in busy urban areas, a situation that requires nearby customers to be grouped in advance so that the deliverymen can serve all customers in a group during one vehicle stop. Consequently, service times can be relatively long compared to travel times, which complicates serving all scheduled customers during regular work hours. In this paper, we propose a hybrid method for the VRPTWMD, combining a branch-price-and-cut (BPC) algorithm with two metaheuristic approaches. We present a wide variety of computational results showing that the proposed hybrid approach outperforms the BPC algorithm used as standalone method in terms of both solution quality and running time, in some classes of problem instances from the literature. These results indicate the advantages of using specific algorithms to generate good feasible solutions within an exact method. Keywords: vehicle routing; multiple deliverymen; hybrid method; branch-price-and-cut; metaheuristics; column generation. 1 Introduction Vehicle routing problems have been widely studied over the last decades due to practical relevance as well as their challenging formulations (Irnich et al., 2014). In this paper, we address the Vehicle Routing Problem With Time Windows and Multiple Deliverymen (VRPTWMD), an extension of the Vehicle Routing Problem with Time Windows (VRPTW) recently introduced in the litera- ture (Pureza et al., 2012). In the VRPTWMD, the service time at the operational points (e.g., customers) of a route depends on the crew size assigned to that route. Therefore, in addition to the typical scheduling and routing decisions, the VRPTWMD treats the number of deliverymen assigned to each route as a decision variable. The VRPTWMD is motivated by the real-life delivery and/or pick-up of goods in congested urban areas where promptly available parking spaces near customers’ locations can be very limited. To deal with this problem, nearby customers are considered as a single cluster and a common parking location is chosen for the customers in the cluster. Then, the vehicle parks at this common 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
An exact hybrid method for the vehicle routing problem
with time windows and multiple deliverymen
Aldair Álvarez, Pedro Munari
Industrial Engineering Department, Federal University of São Carlos,
Rodovia Washington Lúıs - Km 235, CEP: 13565-905, São Carlos-SP, Brazil
[email protected], [email protected]
Abstract
The vehicle routing problem with time windows and multiple deliverymen (VRPTWMD) is a variant of
the vehicle routing problem with time windows in which service times at customers depend on the number
of deliverymen assigned to the route that serves them. In particular, a larger number of deliverymen in
a route leads to shorter service times. Hence, in addition to the usual routing and scheduling decisions,
the crew size for each route is also an endogenous decision. This problem is commonly faced by companies
that deliver goods to customers located in busy urban areas, a situation that requires nearby customers
to be grouped in advance so that the deliverymen can serve all customers in a group during one vehicle
stop. Consequently, service times can be relatively long compared to travel times, which complicates serving
all scheduled customers during regular work hours. In this paper, we propose a hybrid method for the
VRPTWMD, combining a branch-price-and-cut (BPC) algorithm with two metaheuristic approaches. We
present a wide variety of computational results showing that the proposed hybrid approach outperforms the
BPC algorithm used as standalone method in terms of both solution quality and running time, in some
classes of problem instances from the literature. These results indicate the advantages of using specific
algorithms to generate good feasible solutions within an exact method.
Keywords: vehicle routing; multiple deliverymen; hybrid method; branch-price-and-cut; metaheuristics;
column generation.
1 Introduction
Vehicle routing problems have been widely studied over the last decades due to practical relevance
as well as their challenging formulations (Irnich et al., 2014). In this paper, we address the Vehicle
Routing Problem With Time Windows and Multiple Deliverymen (VRPTWMD), an extension of
the Vehicle Routing Problem with Time Windows (VRPTW) recently introduced in the litera-
ture (Pureza et al., 2012). In the VRPTWMD, the service time at the operational points (e.g.,
customers) of a route depends on the crew size assigned to that route. Therefore, in addition to
the typical scheduling and routing decisions, the VRPTWMD treats the number of deliverymen
assigned to each route as a decision variable.
The VRPTWMD is motivated by the real-life delivery and/or pick-up of goods in congested
urban areas where promptly available parking spaces near customers’ locations can be very limited.
To deal with this problem, nearby customers are considered as a single cluster and a common
parking location is chosen for the customers in the cluster. Then, the vehicle parks at this common
1
-
1 Introduction 2
location and the workers deliver (and/or collect) the products on foot to all customers in the
cluster. Because of this operational mode, service times at the clusters can be very long, usually
corresponding to a large percentage of the total route duration. This can compromise the service
of all customers during regular working hours, especially when only one deliveryman is assigned to
the routes. In this context, using additional deliverymen becomes relevant, as a larger number of
deliverymen in a route leads to shorter service times at each cluster of customers.
In this paper, we propose a hybrid method based on a cooperative scheme between a branch-
price-and-cut (BPC) algorithm and two metaheuristic approaches for the VRPTWMD. The meta-
heuristic approaches are based on Iterated Local Search (ILS) and Large Neighborhood Search
(LNS) respectively, and use tailored operators within the search. The BPC algorithm uses state-of-
the-art features such as an interior-point stabilization strategy in the column generation process,
separation of valid inequalities using well-centered points of the feasible sets, strong branching and
a MIP-based primal heuristic. In the hybrid method, metaheuristics can improve the capacity of
the BPC to generate good feasible solutions at an earlier stage while retaining the advantage of the
BPC in providing good lower bounds.
There are few papers proposing solution methods for the VRPTWMD. Pureza et al. (2012)
model this problem based on the standard arc flow formulation for the VRPTW (Desaulniers
et al., 2014). As current general-purpose integer programming solvers are not effective to solve
such formulations within a reasonable running time, the authors propose two metaheuristic ap-
proaches to solve the problem. The first one is a Tabu Search (TS) algorithm characterized by an
adaptive mechanism that changes the parameters of the search based on an analysis of the search
trajectory pattern. The second solution approach is an Ant Colony Optimization (ACO) algorithm
that constructs solutions through a probabilistic insertion mechanism. Senarclens de Grancy and
Reimann (2016) propose two metaheuristic algorithms based on ACO and GRASP to solve the
VRPTWMD. To make the algorithms comparable, the metaheuristics rely on the same construc-
tive heuristic and local search components. Álvarez and Munari (2016) propose two metaheuristic
approaches based on ILS and LNS for the VRPTWMD. In addition to the typical components
of these metaheuristics, both approaches use a set of specific heuristics designed to enhance its
performance, namely, route reduction heuristic and deliverymen reduction heuristic. The latter
approaches are the current state-of-the-art metaheuristic algorithms for the VRPTWMD. Ferreira
and Pureza (2012) develop two heuristic algorithms for a variant of the problem without time win-
dows and drop the requirement of visiting all customers. In their study, the first algorithm is an
extension of the savings algorithm (Clarke and Wright, 1964) and the second is a TS heuristic that
uses an adaptive mechanism as in Pureza et al. (2012). Munari and Morabito (2016) propose a
BPC method for the VRPTWMD, which is the first exact algorithm proposed specifically for this
problem. As reported by the authors, the method was able to find optimal solutions for the first
time for several instances. Moreover, improved upper bounds were obtained by the method.
Although the VRPTWMD can be used as basis for practical and theoretical applications, to the
best of our knowledge, no hybrid methods have been proposed in the literature to solve it. Hence,
the main contribution of this paper is that we develop a hybrid method to solve it, reporting com-
putational results obtained on instances from the literature. In addition, we provide experimental
results to assess the benefits of using extra deliverymen in scenarios allowing different limits on
the crew size. In the past several years, hybrid methods combining exact and metaheuristics ap-
proaches have become popular for solving vehicle routing problems (Danna and Le Pape, 2005;
Alvarenga et al., 2007; Salari et al., 2010; Subramanian et al., 2012; Villegas et al., 2013; Nishi
-
2 Problem description 3
and Izuno, 2014; Cacchiani et al., 2014; Kramer et al., 2015). These hybrid methods attempt to
simultaneously exploit the advantages of their components to obtain better solutions than those
obtained by those same components as standalone approaches.
The remainder of this paper is organized as follows. In Section 2, we describe the VRPTWMD
and a set partitioning formulation for the problem. The hybrid method introduced to solve the
VRPTWMD and its components are detailed in Section 3. The results of our computational
experiments are described in Section 4. Finally, in Section 5, we present the main conclusions of
this research.
2 Problem description
In the VRPTWMD, an optimal solution must satisfy the constraints of vehicle capacities, time
windows and available deliverymen while minimizing the total cost composed by the number of
vehicles, number of deliverymen and traveled distance costs of the routes. Similar to previous
studies on this problem (Pureza et al., 2012; Senarclens de Grancy and Reimann, 2016; Álvarez
and Munari, 2016; Munari and Morabito, 2016), we assume that the clusters of customers are
defined in advance, thus, decisions concerning the selection of parking locations and customers
belonging to the clusters are input data. These data also include service times for the clusters as
a function of the number of deliverymen that can be assigned to a vehicle.
Consider a set of identical vehicles initially located at a central depot. Each can only perform
a single route. A solution to the problem consists of a set of routes that start and end at the depot
such that the demand of each cluster is served by exactly one vehicle (no splitting allowed) and
within the cluster time window. Each route must have a defined number of deliverymen that is
maintained throughout the route. Therefore, given a solution S, its cost is defined by
c(S) = w1v + w2d+ w3t (1)
where v is the number of vehicles used, d is the total number of deliverymen assigned and t is the
total traveled distance in S. Moreover, w1, w2 and w3 are the weights of each objective, which can
be used to define the priorities of these objectives.
2.1 A set partitioning formulation for the VRPTWMD
The VRPTWMD can be formulated as a set partitioning (SP) model (Munari and Morabito, 2016).
Let L be the maximum number of deliverymen that can be assigned to a single route, D be the
total number of available deliverymen at the depot and n be the number of customer clusters. Also,
let P l be the set of all feasible routes using l deliverymen, l = 1, 2, . . . , L. We say that a vehicle
travels in mode l if its crew size is equal to l. We associate the following parameters with each
route p ∈ P l: clp represents its cost and alpi, i = 1, . . . , n, a binary coefficient taking the value 1if and only if route p serves cluster i in mode l. Finally, let λlp be a binary variable that is equal
to 1 if and only if route p is selected. Using this notation, the VRPTWMD can be formulated as
follows:
minL∑l=1
∑p∈P l
clpλlp (2a)
-
3 Hybrid method 4
s.t.L∑l=1
∑p∈P l
alpiλlp = 1, i = 1, . . . , n, (2b)
L∑l=1
∑p∈P l
lλlp ≤ D, (2c)
λlp ∈ {0, 1}, l = 1, . . . , L, p ∈ P l. (2d)
The objective function (2a) minimizes the total cost of the selected routes. Following the definition
stated in (1), the cost of each single route p that sequentially visits the clusters i0, i1, . . . , ir, r > 0,
is given by
clp = w1 + w2l + w3
r−1∑j=0
dijij+1 , (3)
where dij is the Euclidean distance between clusters i and j. Constraints (2b) specify that each
cluster i must be visited by exactly one vehicle in one single mode l. Constraint (2c) imposes
the total number of available deliverymen. Finally, the binary requirements on the variables are
imposed by constraints (2d).
A lower bound on the optimal value of (2a)-(2d) can be obtained by solving its linear program-
ming (LP) relaxation. Indeed, the main advantage of this formulation is that it has a stronger LP
relaxation than the arc flow formulation proposed by Pureza et al. (2012). Nevertheless, model
(2a)-(2d) may contain a huge number of variables because, in general, the number of routes in sets
P l is exponential in terms of n. Therefore, the LP relaxation is solved using column generation.
Still, because the variables λlp are integers, column generation is embedded in a branch-and-bound
algorithm to effectively solve the model (2a)-(2d), leading to a branch-and-price algorithm. The
LP relaxation bounds can be further strengthened by adding valid inequalities to the formulation,
yielding a branch-price-and-cut method (Desrosiers and Lübbecke, 2010).
3 Hybrid method
As mentioned previously, hybrid methods combining exact and metaheuristics approaches have
gained attention in recent years, especially for solving routing problems. Taking advantage of
their individual components, hybrid methods are usually able to obtain better solutions than those
obtained by their components individually as standalone approaches (Jourdan et al., 2009).
A common practice uses heuristic algorithms to populate a column pool with the routes of the
local optimal solutions visited during the search phase. Next, a set partitioning or set covering (SC)
formulation is solved over the pool to generate the best possible solution through the combination
of the routes, typically using a general-purpose integer programming solver. Applications of this
type of method can be found in (Russell and Chiang, 2006; Alvarenga et al., 2007; Subramanian
et al., 2013; Villegas et al., 2013; Yildirim and Çatay, 2014; Cacchiani et al., 2014; Kramer et al.,
2015). These methods can be further extended by incorporating principles of the column generation
method (i.e., using dual variables coming from the LP relaxation of the SP/SC formulation). The
hybrid method tries to guide the search to enrich the pool, attempting to approach better or optimal
solutions (Chen and Xu, 2006; Parragh and Schmid, 2013; Nishi and Izuno, 2014; Hauge et al., 2014).
Other hybrid methods include, among others, the use of an integer program to explore promising
areas of the search space, which are identified in advance by a heuristic component (De Franceschi
et al., 2006; Archetti et al., 2008; Schmid et al., 2010; Salari et al., 2010).
-
3 Hybrid method 5
In the proposed hybrid method, we explore the use of two metaheuristic approaches based on
ILS and LNS and a BPC algorithm in a cooperative solution approach. The metaheuristics and the
BPC interact to improve the ability of the BPC to generate good integer solutions at an earlier stage
and therefore to enhance its performance and suitability in practice. The proposed hybrid method
is similar to the method developed by Danna and Le Pape (2005) to solve the VRPTW, which
combines a branch-and-price algorithm with constructive and local search heuristics. Nevertheless,
one of the main differences between our method and the one proposed by them is that, in the
latter, the constructive heuristic is used to build an initial solution and local search algorithms are
called at regular time intervals to improve the incumbent solution of the method. In contrast, in
our method, ILS and LNS are used inside the hybrid method for the following purposes: (i) to
generate the columns to initialize the root node of the tree; (ii) to provide the initial incumbent
solution of the hybrid method; and (iii) to try to improve each integer solution found by the BPC.
Figure 1 illustrates the proposed hybrid method. The left-hand square represents the BPC
algorithm and the right-hand square shows the metaheuristic approaches. The upper and bottom
circles represent the restricted master problem and the primal heuristic of the BPC, respectively.
The hybrid method functions as follows. First, the ILS and LNS metaheuristics are sequentially
executed. The routes of each feasible solution are stored in a column pool, discarding repeated
columns. During this phase, the best solution found by the metaheuristics is defined as the initial
incumbent of the method. When the column pool reaches a predefined size, the primal heuristic
of the BPC is executed over the pool, in an attempt to find a better solution combining these
columns. When a new best solution is found, the metaheuristics are called to improve it and the
resulting solution is defined as the incumbent solution.
Metaheuristic approaches• Iterated Local Search
• Large Neighborhood Search
Branch-price-and-cut• Column generation
• Cut separation
• Branching
Restricted
master
problem
Primal
heuristic
Columns
Primal (fractional)
and dual solution
Integer solutionColumns
Integer solution
Improved
integer solution
Initial columns
Fig. 1: Hybrid method.
After the first phase, the execution of the BPC is started and when an integer solution is found
during its execution, either because the master problem of a node resulted in an integer solution
or because the primal heuristic found an integer one, the metaheuristics are sequentially applied
-
3 Hybrid method 6
to improve it and update the incumbent solution of the hybrid method, if necessary. One single
run of tMH seconds of each metaheuristic approach is applied; if one of them improves the solution
during a run, they are applied again. This scheme allows us to apply the metaheuristics more often
when they succeed in improving the solutions. The hybrid method stops when it reaches a specified
maximum running time or when it completes the optimality proof of the incumbent solution within
the time limit.
One of the fundamental features underlying this method is the cooperative scheme between the
BPC and the metaheuristics. Given that metaheuristics are designed especially to quickly obtain
good solutions to the problem, they help the BPC find better integer solutions at an earlier stage.
In return, the BPC algorithm helps the metaheuristics by providing different initial solutions for
them.
In the remainder of this section we describe the two metaheuristic approaches used in the hybrid
method. The first one is based on ILS and is described in Section 3.1. The second one is based
on LNS and is described in Section 3.2. The BPC component of the hybrid method is described
in Section 3.3. These contents are a review of concepts already described in Álvarez and Munari
(2016) and Munari and Morabito (2016), respectively, but are recalled here to make this paper
self-contained.
It is worth pointing out that ILS and LNS have been successfully applied to solve many routing
problems (Ropke and Pisinger, 2006; Hong, 2012; Penna et al., 2013; Azi et al., 2014; Silva et al.,
2015; Akpinar, 2016). Therefore they are chosen to be incorporated in the developed hybrid method
because they show a great potential to successfully cooperate with the BPC algorithm. Moreover,
the ILS and LNS of Álvarez and Munari (2016) are the current state-of-the-art metaheuristic
methods for the VRPTWMD.
3.1 ILS-based metaheuristic approach
An Iterated Local Search metaheuristic is an algorithm that applies a local search repeatedly over
solutions resulting from the perturbation of the visited local optimal, which leads to a randomized
walk on the space of local optimal solutions (Lourenço et al., 2003). To devise an ILS algorithm four
main parts are needed: an initial solution, a local search procedure for improvement, a perturbation
mechanism used to escape from local optimal solutions and an acceptance criterion that determines
the solution from which the search should continue.
Our ILS approach combines the local search procedure with a set of additional specific heuristics
to iteratively improve the local optimal solution. Due to the use of diverse heuristic components, our
approach can tackle different parts of the objective function with the goal of refining the obtained
solutions. To this end, the approach comprises two phases. The first phase focuses on reducing the
number of vehicles of the solution, perturbing the solutions with a route reduction heuristic. The
second phase focuses on reducing the traveled distance, perturbing the solutions with a randomized
removal and insertion heuristic. A high-level structure of the approach is given in Algorithm 1.
The components of the approach are briefly described below.
For the local search procedure, we use a variable neighborhood descent heuristic (Mladenovic
and Hansen, 1997) with random neighborhood ordering (RVND). This heuristic explores increas-
ingly different neighborhoods of the current incumbent solution, repeatedly applying a set of local
search operators to reach the local optimal solution. The used RVND relies on six inter-route op-
erators, namely, Shift(k,0) with k = 1, 2, 3; Swap(1,1); Swap(2,1); and Swap(2,2). The Shift(k,0)
operators move k adjacent clusters from one route to another one, while the Swap(a,b) operators
-
3 Hybrid method 7
Algorithm 1: ILS-based metaheuristic approach.
output: Best solution S∗;1 begin2 S0 ← Generate initial solution;3 S∗ ← Local search(S0);4 repeat
5 S′ ← Perturb(S∗);
6 S′ ← Local search(S′);
7 S′ ← Deliverymen reduction(S′);
8 Acceptance criterion (S′, S∗);
9 until reaching the stopping criterion;
10 end
exchange a adjacent clusters in one route with b adjacent clusters in another. There are also two
intra-route operators, namely, Or-opt-1 and 2-opt. In 2-opt, two nonadjacent arcs are removed and
another two are added in a way that generates a new route. Finally, Or-opt-1 consists of transfer-
ring one cluster from its current position to another one in the same route. The used operators are
special instantiations of the λ-interchange operators originally proposed by Osman (1993).
Next, perturbation operations must be applied to allow the approach to escape from local opti-
mal solutions and explore new regions of the search space. In our approach, one of the perturbation
mechanisms consists of one operation of removal and reallocation of up to np clusters of the current
solution. Note that the performance of this approach is closely related to this parameter (strength
of the perturbation mechanism) because it defines much of the behavior of the metaheuristic. If a
too strong perturbation is applied, then the algorithm may behaves as a random restart algorithm.
On the other hand, if the perturbation is too weak, the metaheuristic may not be able to escape
from local optimal solutions.
A route reduction heuristic is also applied as perturbation mechanism. This heuristic tries to
reallocate, one route at a time, all clusters from a given route to the other routes. The heuristic
allocates extra deliverymen to the routes if this allows additional clusters on them. Note that this
heuristic can both improve the overall quality of the solution (because of the weights of the com-
ponents of the objective function) and completely change the structure of the solution. Therefore,
it is used as improvement heuristic on the approach after each iteration of the RVND heuristic.
The deliverymen reduction heuristic is another improvement heuristic used on the metaheuristic
approach. This heuristic is specific for the variable crew size feature of the problem. It tries to
reduce the number of deliverymen one route at a time, even if it is necessary to remove clusters
from the route, i.e., if the route becomes infeasible when the crew size is reduced, the first violated
cluster of the route is removed iteratively until the feasibility of the route is restored. Then, the
heuristic tries to insert the removed clusters into the other routes of the solution. Finally, the
acceptance criterion of the metaheuristic approach only accepts solutions that improve the best
feasible solution encountered so far.
3.2 LNS-based metaheuristic approach
The other metaheuristic approach in the hybrid method is based on Large Neighborhood Search
(Shaw, 1998), a metaheuristic that gradually improves the solutions by successively applying destroy
-
3 Hybrid method 8
and repair operators. In LNS, a destroy operator removes some components of the current solution
using a defined criterion, while the repair operator rebuilds the destroyed solution by reinserting
the removed parts using a specified rule. Thereafter an acceptance criterion decides to accept or
reject the resulting solution as the new current solution, based on the improvement of the current
local minimum. To devise an enhanced solution method, the basic destroy and repair operators are
combined with additional specific heuristics for the VRPTWMD, as in the ILS-based approach. A
high-level description of the approach is given in Algorithm 2.
Algorithm 2: LNS-based metaheuristic approach.
output: Best solution S∗;1 begin2 S0 ← Generate initial solution;3 S∗ ← S0;4 repeat
5 S′ ← Apply destroy and repair operators to S+;
6 S′ ← Route reduction(S′);
7 S′ ← Deliverymen reduction(S′);
8 S′ ← RVND(S′);
9 Acceptance criterion (S′, S∗);
10 until reaching the stopping criterion;
11 end
In total, the LNS-based approach uses four destroy operators and two repair operators. Each
destroy operator removes up to q clusters of the input solution, returning a partially destroyed
solution. The operators used are: random removal, worst removal, related removal and time-
oriented removal. These operators were used by Pisinger and Ropke (2007) for a pickup and
delivery problem, and its adaptation to the VRPTWMD is straightforward. The random removal
operator selects the clusters to be removed in a random manner. The worst removal operator
removes clusters that are expensive (in terms of distance) on their current routes. In the related
removal operator, the relatedness of two clusters i and j is measured as the distance between them
(dij). In the time-oriented removal operator, relatedness ∆ij between clusters i and j is measured
by ∆ij = |wi − wj |, where wi denotes the time instant in which service starts at cluster i. In thelatter two operators, closely related clusters are removed because they are expected to be easily
exchangeable. Similar to the size of the perturbation in ILS, the parameter q in LNS has a major
influence on the behavior of the metaheuristic approach, as it defines the size of the destruction
to be applied to the solution at each iteration. If too large, LNS may resemble a random restart
algorithm, whereas a too small destruction may not allow LNS to efficiently explore the solution
space.
Regarding the repair operators, which are used to restore the feasibility of the destroyed so-
lutions, we use two operators, a greedy insertion heuristic and a regret insertion heuristic, which
were also employed by Pisinger and Ropke (2007). The greedy heuristic tries to insert clusters in
the cheapest (in terms of additional distance) insertion position, whereas the regret heuristic tries
to prioritize the insertion of tightly constrained clusters to anticipate the insertion of customers
that have only a few possible insertion positions. Routes reductions and deliverymen reductions
are conducted in the same manner as in the ILS-based approach.
-
3 Hybrid method 9
3.3 Branch-price-and-cut method
We now briefly describe the branch-price-and-cut (BPC) algorithm that we used to solve the SP
model of the VRPTWMD. It is based on the BPC proposed by Munari and Morabito (2016) and
uses the interior point BPC framework of Munari and Gondzio (2013, 2015). In a BPC algorithm,
lower bounds are computed by solving the LP relaxation of the SP model using column generation.
Also, valid inequalities are dynamically added to tighten these bounds.
In the column generation method, we solve the original linear program, called the Master
Problem (MP), by employing a reduced version of the problem containing only a subset of variables.
This reduced problem is called the Restricted Master Problem (RMP), which, in our application,
consists of the LP relaxation of the SP model (2a)-(2d), considering the subsets P̄ l ⊆ P l, l =1, . . . , L, as follows:
min
L∑l=1
∑p∈P̄ l
clpλlp (4a)
s.a
L∑l=1
∑p∈P̄ l
alpiλlp = 1, i = 1, . . . , n, (4b)
L∑l=1
∑p∈P̄ l
lλlp ≤ D, (4c)
λlp ≥ 0, l = 1, . . . , L, p ∈ P̄ l. (4d)
Let λ∗ and (ū, v̄) be the optimal primal and dual solutions, respectively, where ū ∈ Rn andv̄ ∈ R− are associated to constraints (4b) and (4c), respectively. Using this dual solution, thereduced cost of the pth column is given by clp−
∑ni=1 a
lpiūi− lv̄. At each iteration of the method, we
solve the RMP and, using its dual solution, look for a variable/column with negative reduced cost.
Since it is not possible to enumerate all the columns of the sets P l, l = 1, . . . , L, we obtain columns
with negative reduced cost by solving the following optimization problem (pricing problem):
minp∈P l
{clp −
n∑i=1
alpiūi − lv̄}, (5)
for each l = 1, . . . , L. Hence, the pricing problem solver is called up to L times at each iteration,
once for each mode l. These pricing problems are resource constrained shortest path problems and
differ from each other only in the service times of the clusters (as they depend on the corresponding
mode). Each pricing problem is solved through a multi-phase dynamic programming approach as
proposed by Desaulniers et al. (2008), which uses a label-setting dynamic programming algorithm
further aided by heuristics algorithms. In this approach, a phase is defined by an ordered sequence of
algorithms and parameters associated with them. The algorithms used are: local search operators,
heuristic dynamic programming and exact dynamic programming. In a sequence, the algorithms
are ordered from the fastest to the slowest, and the last-phase algorithm sequence contains the
exact dynamic programming algorithm to guarantee that the LP relaxation of the SP model is
solved to its optimality (Munari and Gondzio, 2013).
Subset-row (SR) inequalities (Jepsen et al., 2008) are generally used in BPC algorithms for
routing problems (Desaulniers et al., 2008; Archetti et al., 2011; Baldacci et al., 2011; Munari and
Gondzio, 2013; Gauvin et al., 2014), especially those based on triplets of nodes as follows. Let
-
4 Computational experiments 10
S = {i1, i2, i3} ⊂ {1, 2, . . . , n} be a triplet of nodes (clusters of customers). Then the correspondingSR inequality must enforce that at most one route/column visits at least two nodes in S. For theVRPTWMD, Munari and Morabito (2016) incorporated the number of deliverymen as follows. Let
IS ∈ P̄ be the subset of routes serving at least two nodes in S. The SR inequality is given by:
L∑l=1
∑p∈IS
λlp ≤ 1. (6)
In the BPC algorithm, the initial set of columns of the restricted master problem in the root
node contains all single-cluster routes (0, i, 0), i = 1, . . . , n for each mode l, as well as columns
generated by a savings algorithm (Clarke and Wright, 1964) and modified through some simple
local search operators. Upper bounds are obtained by a primal heuristic, which exploits the fact
that any column in a given restricted master problem corresponds to a feasible route and, therefore,
one can try to obtain a feasible solution to the problem from the combination of a subset of these
routes. After completing the column generation process, the heuristic imposes integrality on the
master variables and solves the integer programming problem using a general-purpose MIP solver.
Each single call to the primal heuristic runs for up to tSP seconds, because solving the resulting
MIP to optimality can be very time consuming.
The search tree is explored using a best-first strategy, that is, the node with the lowest lower
bound is the node to be processed next. Branching is performed in the tree using three rules. They
are presented in order of priority and, independently of the rule applied, two new child nodes are
created. The first branching rule branches on the number of vehicles used in the fractional solution.
When this value is an integer, the second rule calculates the total number of deliverymen used in the
master problem and branches on that. Finally, the third branching rule is on the flow of an arc if
both the number of vehicles and deliverymen of the fractional solution are integer. To improve the
branching strategy, the BPC algorithm uses the strong branching technique (Achterberg et al., 2005;
Santos et al., 2015). Furthermore, the branching process is performed using the early branching
approach described by Munari and Gondzio (2013).
The computational implementation uses the stabilization technique known as the primal-dual
column generation method (Munari et al., 2011; Gondzio et al., 2013), which employs an interior
point algorithm to solve the restricted master problems in the column generation process. This
algorithm can provide well-centered suboptimal solutions without requiring any artificial resource.
Due to this centrality, the oscillation of the dual solutions is relatively small from one iteration to
another, which contributes to improve the performance of the column generation method regarding
the number of iterations and the running time. Moreover, the primal solutions provided by the
interior point algorithm are also central and hence can be used to reduce the number of generated
valid inequalities, as deeper cuts can be separated. These cuts improve the lower bound provided
by the master problem more quickly than the cuts generated from optimal solutions (Munari and
Gondzio, 2013). In the BPC algorithm, the valid inequalities are separated within the column
generation process. For a detailed description and extensive computational experiments with the
BPC algorithm see Munari and Morabito (2016).
4 Computational experiments
In this section, we present the results of our computational experiments. First, we describe the
instances used in our tests. Next, we report the results obtained with the hybrid method and
-
4 Computational experiments 11
compare its performance against standalone versions of the BPC and the metaheuristics. Finally,
we perform some additional analyses regarding the characteristics of the problem.
In tables presented hereafter, Inst denotes the name of the instance, Cost represents the cost
of the solution found (value of the objective function), Veh is the number of vehicles used in the
solution, Dist indicates the total distance covered by the solution, Del denotes the total number
of deliverymen allocated to the solution, Nodes corresponds to the number of nodes processed
in the search tree, Total time shows the time used to solve the instance (in seconds) and Time
best indicates the time required to find the best incumbent of the method (in seconds). Optimal
solutions are marked with a ‘*’ to the right of their cost. For each instance/class, bold text shows
the best result (in terms of the cost of the solution). As the cost is presented using only two
decimal places, ties are broken by the following rules, presented in descending order of priority:
proven optimality; shorter traveled distance; shorter total time; and shorter time to best solution.
All tests were performed on an Intel(R) Core(TM) i7-2600 3.4 GHz processor and 16 GB of
RAM. The algorithms were implemented in C++ and the primal heuristic of the BPC uses the
IBM ILOG Cplex Optimizer version 12.4 with its default parameter settings.
The parameters of the problem were defined with the same values used in (Pureza et al., 2012;
Senarclens de Grancy and Reimann, 2016; Munari and Morabito, 2016; Álvarez and Munari, 2016)
aiming to maintain the same structure used in those papers and also because we used the same
instances to test our methods (see Section 4.1). Thus, we assume that the maximum number of
deliverymen allowed in a single vehicle is L = 3 (limited by space restrictions in the cab of an
average truck). We also assume that the total number of deliverymen is sufficiently large for any
instance (D = 50), the fleet size is considered unbounded, travel costs are equal to the distances
and the weights of the objective function are w1 = 1, w2 = 0.1 and w3 = 0.0001. Note that these
weights prioritize solutions using fewer vehicles, followed by those using fewer deliverymen and,
finally, solutions with shorter traveled distances.
The values adopted for the parameters of the metaheuristic approaches are the same used by
Álvarez and Munari (2016), which were defined through a design of experiments, using a full facto-
rial experiment (Montgomery, 2008). The time limit for the primal heuristic of the BPC algorithm
and the metaheuristics in the hybrid method were defined through preliminary experiments as
tSP = 30 and tMH = 5, respectively.
4.1 Test instances
To evaluate our hybrid method, we used the well-known benchmark instances proposed by Solomon
(1987) modified for the VRPTWMD. The set of 56 instances, each one with 100 nodes, is divided
into three classes according to the geographical distribution of customers: randomly distributed (R),
clustered (C) and a mix of randomly distributed and clustered (RC). Each class is further divided
into two classes. Classes R1, C1 and RC1 are characterized by vehicles with smaller capacity and
customers with tighter time windows than those in classes R2, C2 and RC2. Note that because of
their characteristics, instances of the classes 2 are more challenging for column generation-based
methods (Munari and Gondzio, 2013; Desaulniers et al., 2014).
Following Pureza et al. (2012), we assume that the coordinates of the customers in the Solomon’s
instances are the coordinates for the parking location of the clusters in the VRPTWMD. Also, all
the original data of the instances is kept, except for the service time at each node, which is replaced
-
4 Computational experiments 12
by the service time at the node according to a mode l, computed as
sil = min{rs ∗ di, wb0 −max{wai , d0i} − di0}/l, i = 1, . . . , n, l = 1, . . . , L, (7)
where rs is the service rate (in the experiments we used rs = 2) and di is the demand of the node
i. The second term in the equation guarantees the feasibility of the instance. Note that short
service times can be obtained this way, if the number of deliverymen in a route is large. This makes
the VRPTWMD hard to solve for a column generation-based algorithm, as we need to solve one
subproblem for each mode l and large values of l may lead to long routes, which negatively affects
the performance of the label-setting algorithm.
4.2 Comparison of the hybrid method against the standalone BPC method
In this section, we compare the performances of the hybrid method and the BPC algorithm used
as a standalone method. Tables 1-6 show the results obtained by these methods within a one-hour
time limit. In these tables, columns 2-8 and 9-15 present the best solution (and its attributes)
found by the BPC algorithm and the hybrid method, respectively. The last row of the tables (Avg)
shows the arithmetic mean value of each column.
The analysis of these results reveals that for instances in the first classes (Tables 1-3) there
are relatively small cost differences between the best solutions found, as the structure of these
instances allows the BPC algorithm to obtain good feasible solutions. In terms of running times,
note that for classes RC1 and C1 the hybrid method was faster when both algorithms found the
optimal solution within the time limit. It is also worth pointing out that in class C1 the hybrid
method was almost 3 times faster than the BPC when both methods found the optimal solution,
leading to a significant performance improvement compared to the BPC algorithm. Moreover, for
the instance C104, the hybrid method found a better solution (due to smaller total distance). Only
for instances R101 and R102, which are considered to be easy, the BPC algorithm was faster than
the hybrid method because of the time the hybrid method spent in the initial phase (metaheuristics
and primal heuristic call).
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
R101 23.67* 19 1720.11 45 3 26 29 23.67* 19 1720.11 45 3 31 78R102 20.95* 17 1530.92 38 1 14 15 20.95* 17 1530.92 38 1 6 23R103 15.84 13 1369.92 27 32 2130 3600 15.84 13 1368.73 27 24 1735 3600R104 13.62 11 1164.77 25 17 2127 3600 12.61 10 1074.75 25 10 2008 3600R105 17.66 14 1594.71 35 81 2667 3600 17.55 14 1542.43 34 57 832 3600R106 14.34 11 1382.93 32 50 2498 3600 15.13 12 1327.21 30 5 154 3600R107 12.82 10 1165.65 27 30 2320 3600 12.81 10 1126.48 27 18 3153 3600R108 11.60 9 1000.74 25 5 1057 3600 11.70 9 961.62 26 10 567 3600R109 14.33 11 1336.39 32 45 2599 3600 14.23 11 1269.35 31 29 1201 3600R110 12.92 10 1180.93 28 27 1847 3600 13.02 10 1195.56 29 22 981 3600R111 13.92 11 1183.90 28 31 2141 3600 12.82 10 1158.75 27 22 2846 3600R112 11.70 9 1014.01 26 26 3048 3600 11.70 9 989.11 26 6 3600 3600
Avg. 15.28 12.08 1303.75 30.67 29.00 1872.83 3003.66 15.17 12.00 1272.09 30.42 17.25 1426.17 3008.40
Tab. 1: BPC algorithm vs hybrid method results for the instances in class R1.
For instances not solved to optimality in classes R1 and RC1, the average number of nodes
explored in the hybrid method is reduced compared to the BPC algorithm. This is because the
hybrid method spends time on metaheuristics, which reduces the time for running the column
generation method and the other components of the BPC. Finally, with respect to the time required
-
4 Computational experiments 13
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
RC101 20.19* 16 1862.21 40 97 1453 3036 20.19* 16 1862.21 40 43 195 2164RC102 17.08* 13 1777.29 39 21 613 848 17.08* 13 1777.29 39 11 552 734RC103 14.44 11 1393.87 33 33 1832 3600 14.44 11 1386.83 33 23 3148 3600RC104 14.03 11 1299.06 29 8 846 3600 14.02 11 1249.98 29 10 957 3600RC105 17.87 14 1724.32 37 65 3120 3600 17.87 14 1718.14 37 49 231 3600RC106 16.66 13 1641.94 35 35 3575 3600 16.65 13 1529.19 35 38 3191 3600RC107 14.33 11 1338.18 32 8 3319 3600 14.33 11 1338.18 32 8 439 3600RC108 14.03 11 1288.03 29 5 908 3600 14.03 11 1286.04 29 9 1603 3600
Avg. 16.08 12.50 1540.61 34.25 34.00 1958.25 3185.46 16.08 12.50 1518.48 34.25 23.88 1289.50 3062.32
Tab. 2: BPC algorithm vs hybrid method results for the instances in class RC1.
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
C101 11.08* 10 828.94 10 1 90 90 11.08* 10 828.94 10 1 14 56C102 11.08* 10 828.94 10 1 189 189 11.08* 10 828.94 10 1 7 65C103 11.08* 10 828.06 10 1 493 493 11.08* 10 828.06 10 1 8 233C104 11.09 10 858.25 10 1 3600 3600 11.08 10 819.81 10 1 9 3600C105 11.08* 10 828.94 10 5 159 179 11.08* 10 828.94 10 1 6 47C106 11.08* 10 828.94 10 1 134 134 11.08* 10 828.94 10 1 6 45C107 11.08* 10 828.94 10 1 75 76 11.08* 10 828.94 10 1 5 41C108 11.08* 10 828.94 10 1 146 146 11.08* 10 828.94 10 1 7 44C109 11.08* 10 827.26 10 1 411 411 11.08* 10 827.26 10 1 8 72
Avg. 11.08 10.00 831.91 10.00 1.44 588.56 590.90 11.08 10.00 827.64 10.00 1.00 7.78 467.06
Tab. 3: BPC algorithm vs hybrid method results for the instances in class C1.
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
R201 5.36 4 1634.43 12 1 0 3600 4.94 4 1364.77 8 1 3 3600R202 4.95 4 1498.07 8 5 0 3600 4.82 4 1170.21 7 2 26 3600R203 4.04 3 1394.24 9 4 1 3600 3.70 3 990.30 6 3 546 3600R204 4.01 3 1095.99 9 2 0 3600 3.58 3 813.45 5 2 22 3600R205 4.94 4 1368.27 8 1 0 3600 3.81 3 1123.64 7 1 6 3600R206 4.02 3 1218.48 9 2 0 3600 3.70 3 982.64 6 2 8 3600R207 3.71 3 1100.47 6 2 0 3600 3.59 3 902.90 5 1 17 3600R208 3.70 3 954.65 6 2 0 3600 2.57 2 743.05 5 2 43 3600R209 4.93 4 1339.97 8 2 0 3600 3.71 3 1102.59 6 2 3600 3600R210 4.03 3 1319.02 9 3 0 3600 3.70 3 1034.30 6 2 9 3600R211 3.70 3 988.09 6 0 0 3600 3.59 3 901.84 5 3 3600 3600
Avg. 4.31 3.36 1264.70 8.18 2.18 0.09 3600.00 3.79 3.09 1011.79 6.00 1.82 716.36 3600.00
Tab. 4: BPC algorithm vs hybrid method results for the instances in class R2.
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
RC201 6.68 5 1831.81 15 5 0 3600 5.15 4 1512.05 10 4 3031 3600RC202 5.37 4 1693.07 12 8 0 3600 4.93 4 1295.60 8 10 2470 3600RC203 4.96 4 1571.07 8 2 1 3600 3.91 3 1123.82 8 4 7 3600RC204 4.93 4 1267.75 8 4 0 3600 3.69 3 917.55 6 4 36 3600RC205 6.21 5 2094.37 10 4 0 3600 5.04 4 1445.61 9 2 3600 3600RC206 5.35 4 1529.37 12 2 0 3600 4.92 4 1180.93 8 4 3600 3600RC207 5.36 4 1624.68 12 5 0 3600 4.02 3 1193.01 9 3 7 3600RC208 4.02 3 1191.66 9 3 0 3600 3.79 3 917.84 7 3 15 3600
Avg. 5.36 4.13 1600.47 10.75 4.13 0.13 3600.00 4.43 3.50 1198.30 8.13 4.25 1595.75 3600.00
Tab. 5: BPC algorithm vs hybrid method results for the instances in class RC2.
-
4 Computational experiments 14
InstBPC algorithm Hybrid method
Cost Veh Dist Del Nodes Time Total Cost Veh Dist Del Nodes Time Totalbest time best time
C201 3.36* 3 588.88 3 1 487 487 3.36* 3 588.88 3 1 12 169C202 3.36 3 588.88 3 1 3600 3600 3.36 3 588.88 3 1 27 3600C203 3.36 3 585.27 3 1 841 3600 3.36 3 585.27 3 1 38 3600C204 3.36 3 584.49 3 1 3600 3600 3.36 3 584.49 3 1 54 3600C205 3.36* 3 588.49 3 1 1083 1083 3.36* 3 588.49 3 1 19 102C206 3.36* 3 588.49 3 1 811 811 3.36* 3 588.49 3 1 23 105C207 3.36 3 587.31 3 1 3600 3600 3.36* 3 587.31 3 1 26 3016C208 3.36* 3 588.29 3 1 2875 2875 3.36* 3 588.29 3 1 29 1853
Avg. 3.36 3.00 587.51 3.00 1.00 2112.13 2457.05 3.36 3.00 587.51 3.00 1.00 28.50 2005.46
Tab. 6: BPC algorithm vs hybrid method results for the instances in class C2.
to find the final incumbent (Time best), it can be observed that the hybrid method reduced the
average time 23% and 34% for classes R1 and RC1, respectively, compared to the BPC algorithm.
Note that for all but one instance (C104) of class C1, the hybrid method quickly found the optimal
solution and spent the rest of the time trying to prove optimality.
The results for instances in the classes R2 and RC2 (Tables 4-5) show substantial gains in
terms of the cost of the best solutions found. The proposed hybrid method reduced the average
cost compared to the BPC algorithm by 12% and 17%, respectively in these classes. For class C2,
both methods found the same solutions for all instances. Nevertheless, the hybrid method was,
on average, more than two times faster than the BPC algorithm when both methods proved the
optimality of the solution found. Additionally, the hybrid method proved the optimality of one
solution (C207) that the BPC could not prove. Notice also that both methods explore a similar
number of nodes in the search tree. It is worth noting that, in these classes, the average number
of nodes is low with respect to classes R1, RC1 and C1.
Regarding the time to reach the final incumbent, in classes R2 and RC2 the BPC algorithm
found a first solution by calling the primal heuristic on the initial columns, which are generated
by simple heuristics (see Section 3.3), and these solutions remained as the incumbents until the
algorithm stopped. This shows the difficulty of these instances. The hybrid method spent more
time to reach the final incumbents, but it found much better solutions than those found by the
BPC algorithm. Similar to class C1, in class C2 the hybrid method rapidly found the optimal
solution of five instances and spent the rest of the time proving its optimality.
4.3 Longer running times and variants of the hybrid method
We have run other experiments imposing time limits of two and ten hours to assess the gains of
the hybrid method for longer time limits. The results are summarized in Tables 7-8. For the time
limit of two hours, the results in Table 7 show that the overall performance of the hybrid method
is superior in comparison to the BPC algorithm in all classes. In terms of average solution costs,
the largest relative differences are observed in classes R2 and RC2, for which the hybrid method
found solutions with costs 13.5% and 14.3% lower than the BPC, respectively. In particular for
class R2, the BPC algorithm finished (due to time limit) with the initial solutions for all instances
– as the average time to find the best solution is zero, while the hybrid method was able to find
better solutions running for more than 1 hour. In classes C1 and C2, for which the solution costs
were the same for both methods, we observe reductions of 9.3% and 47.5% on the average total
times for the hybrid method, respectively.
For the time limit of ten hours (Table 8) a similar behavior is observed. In classes R2 and
-
4 Computational experiments 15
MethodInstance class
R1 RC1 C1 R2 RC2 C2
BPCalgorithm
Cost 15.62 16.07 11.08 4.31 5.16 3.36Veh 12.33 12.50 10.00 3.36 4.00 3.00Dist 1301.64 1535.15 827.72 1264.70 1567.68 587.51Del 31.58 34.13 10.00 8.18 10.00 3.00
Nodes 40.33 36.63 1.22 4.27 11.13 1.00Time best 2549.42 3397.00 958.33 0.00 792.13 1693.50Total time 5861.39 5929.28 962.02 7200.00 7200.00 3769.33
Hybridmethod
Cost 15.10 16.06 11.08 3.73 4.42 3.36Veh 11.92 12.50 10.00 3.00 3.50 3.00Dist 1254.61 1519.81 827.64 1008.40 1204.94 587.51Del 30.58 34.13 10.00 6.27 8.00 3.00
Nodes 42.25 33.50 1.00 4.82 10.13 1.00Time best 1992.42 1789.25 7.78 4815.27 3447.38 30.13Total time 5740.32 5712.13 872.20 7200.00 7200.00 1979.58
Tab. 7: BPC algorithm vs hybrid method results (grouped) within two hours.
MethodInstance class
R1 RC1 C1 R2 RC2 C2
BPCalgorithm
Cost 15.23 16.08 11.09 4.07 4.93 3.36Veh 12.08 12.50 10.00 3.18 3.88 3.00Dist 1286.65 1523.18 853.49 1199.05 1448.74 587.51Del 30.17 34.25 10.00 7.64 9.13 3.00
Nodes 179.75 81.00 1.89 37.82 46.38 1.00Time best 11631.58 6084.00 260.89 7553.64 6399.00 6629.88Total time 25675.60 18655.11 4194.27 36000.00 36000.00 10892.55
Hybridmethod
Cost 15.09 16.06 11.08 3.72 4.30 3.36Veh 11.92 12.50 10.00 3.00 3.38 3.00Dist 1269.65 1516.46 827.64 999.59 1219.32 587.51Del 30.42 34.13 10.00 6.18 8.00 3.00
Nodes 128.25 53.38 1.00 26.18 53.38 1.00Time best 8412.75 5243.50 7.56 16541.55 12011.13 28.00Total time 25272.32 17726.70 4089.15 36000.00 36000.00 9941.91
Tab. 8: BPC algorithm vs hybrid method results (grouped) within ten hours.
RC2, the hybrid method reaches average cost reductions of 8.6% and 12.8% when compared to
the BPC, respectively. For these two classes, we also observe the largest gains with respect to the
costs obtained within the time limit of 1 hour. The average costs of the solution obtained within
10 hours are 15.9% and 24.65% smaller for R2 and RC2, respectively, comparing with the average
results in Tables 4 and 5. Both methods solved 23 instances to optimality within 10 hours, while
the BPC solved 18 and the hybrid method 19 within the time limit of 2 hours. Nevertheless, in
both time limits, the average time to reach the best solution (Time best) of the hybrid method is
always lower than the time spent by the BPC, in most classes (especially for C1 and C2). In the
classes for which the hybrid method spents more time to find the best solution, it found better
solutions than those found by the BPC. Therefore, the results in Tables 7-8 reinforce the benefits
of using specific algorithms to obtain good feasible solutions within an exact method, for short as
well as long running times.
It is worth mentioning that an ILS metaheuristic was developed to solve the column generation
subproblems, leading to two variants of the hybrid method. The first includes ILS within the
current multi-phase solver approach, whereas the second consists of solving the subproblems using
only the ILS approach (this variant loses optimality guarantee). For what concerns the first variant,
computational experiments showed that, despite the metaheuristic can rapidly find columns with
-
4 Computational experiments 16
negative reduced cost in early iterations of the column generation method, in close-to-optimality
iterations (when the optimality gap of method is small) the metaheuristic tend to fail and the
multi-phase approach relies on the dynamic programming algorithm to find columns with negative
reduced cost. As a result, no significant gain was achieved by this method. Regarding the variant
that only uses ILS to solve the subproblems, the results show that no substantial gain in terms
of solution quality was reached because this method lacks of an accurate guidance, given by the
approximated bounds calculated in the column generation. Therefore, we decided not to include
these variants in the next experiments.
4.4 Comparison of the hybrid method against the standalone metaheuristics
We now compare the results of the proposed hybrid method with respect to standalone versions of
the metaheuristic approaches, using relatively short running times. This analysis is made to assess
the performance of the hybrid method with respect to specialized methods developed to quickly
provide good solutions. We ran the metaheuristics for five times, with each run having a time limit
of 600 seconds, and took the best result for each instance. For the hybrid method, we ran a single
execution for two different time limits: 600 and 3000 seconds (5*600 seconds). Table 9 shows the
average results for each instance class. When comparing the hybrid method with the shorter time
limit to the results of metaheuristics, we can observe that the former can be competitive for classes
R1, RC1 and C1. The relative difference between the average cost of the solutions is relatively
small for class R1, and the hybrid method clearly outperforms the metaheuristics for class RC1.
When comparing to the hybrid method with a longer time limit, we observe that the hybrid method
now outperforms the metaheuristics in both classes R1 and RC1. As classes R2 and RC2 are more
difficult for the hybrid method, the metaheuristics performed better on these two classes in relation
to the hybrid method (for both time limits). Finally, note that in classes C1 and C2 all methods
found the same solutions, however the running times of the hybrid method are shorter for class C1
(for both time limits) and for class C2, because it can prove the optimality of some solutions and
stop early. These results indicate that the developed hybrid method (which is an exact method)
can be competitive with respect to the metaheuristics used as standalone methods, for relatively
short running times.
4.5 Source of the final/best integer solutions in the methods
In this section, we show the sources of the final integer solutions obtained by the hybrid method and
the BPC algorithm. Notice that these methods can have up to four sources of integer solutions,
namely, (i) initial call of the metaheuristics; (ii) restricted master problem (RMP); (iii) primal
heuristic (SP); and (iv) metaheuristic algorithms. Remember that the last source (metaheuristics
algorithms) uses the solutions of the primal heuristic and the integer solutions of the restricted
master problem as starting solutions. Also note that the first and last sources are only present
in the hybrid method. A distinction between the first and subsequent calls to the metaheuristic
algorithms as sources of integer solutions was made to assess the capacity of the metaheuristics to
generate good feasible solutions in very short running times (first source). Table 10 reports the
number of times that each component found the solution that remained as the final (best) one, for
time limits equal to 600 and 3,600 seconds.
These results reveal that the BPC algorithm strongly depends on the primal heuristic to find
the best solutions, as this heuristic provides more than 75% of them. The remaining solutions of
-
4 Computational experiments 17
MethodInstance class
R1 RC1 C1 R2 RC2 C2
Cost 15.34 16.59 11.08 3.63 4.31 3.36ILS Veh 12.17 13.00 10.00 2.91 3.38 3.00
(best out Dist 1271.71 1482.46 827.64 993.17 1186.61 587.51of de 5) Del 30.50 34.38 10.00 6.18 8.13 3.00
Total time 600.75 601.25 600.22 604.09 603.25 601.50
Cost 15.32 16.50 11.08 3.64 4.29 3.36LNS Veh 12.08 12.88 10.00 2.91 3.38 3.00
(best out Dist 1271.64 1492.29 827.64 998.00 1197.49 587.51of de 5) Del 31.08 34.75 10.00 6.27 8.00 3.00
Total time 602.42 603.25 600.67 610.09 609.50 602.75
BPC algorithm
Cost 16.41 16.24 11.09 4.31 5.36 3.37Veh 13.00 12.63 10.00 3.36 4.13 3.00Dist 1383.63 34.63 853.49 1264.70 1600.47 686.04Del 32.75 34.63 10.00 8.18 10.75 3.00
Total time 506.35 600.06 274.04 631.18 627.98 590.42
Cost 15.37 16.10 11.08 3.84 4.56 3.36Hybrid Veh 12.17 12.50 10.00 3.09 3.63 3.00method Dist 1257.45 1520.33 827.64 1006.68 1218.83 587.51
(600 seconds) Del 30.75 34.50 10.00 6.45 8.13 3.00Total time 507.90 600.00 140.10 600.00 600.00 428.47
Cost 15.12 16.06 11.08 3.81 4.42 3.36Hybrid Veh 11.92 12.50 10.00 3.09 3.50 3.00method Dist 1260.19 1523.10 827.64 1001.05 1230.39 587.51
(3000 seconds) Del 30.75 34.13 10.00 6.18 8.00 3.00Total time 2507.82 2465.05 390.19 3,000.00 3,000.00 1,626.09
Tab. 9: Best results (grouped) of the methods.
SourceBPC Hybrid
600 s 3600 s 600 s 3600 sInitial call of the metaheuristics - - - - 22 26
Restricted master problem 11 13 1 0Primal heuristic 45 43 1 2
Metaheuristics algorithms - - - - 32 28
Tab. 10: Source of the final solution in the methods.
the BPC algorithm are provided by the restricted master problem and correspond to the solutions
for the instances in classes C1 and C2 that were solved to optimality within the time limit.
For the hybrid method, most of the final solutions are provided by its metaheuristic component,
especially when the metaheuristics use solutions coming from the primal heuristic and the restricted
master problem of the BPC. Note that only few of the final incumbent solutions come from the
sources RMP and SP . This does not mean that these components are not capable of generating
feasible solutions, but rather that the metaheuristics can improve them in most cases. These
results confirm that the developed cooperative scheme succeeds in enhancing the capacity of the
BPC algorithm to find good feasible solutions.
4.6 Additional analyses
In this section, we first analyze the route structures of the solutions in terms of the times that
compose them. To this end, we analyzed the solutions of the hybrid method (under a one-hour
time limit), to identify the proportions of the total time corresponding to service, travel and waiting.
Note that waiting times occur when a vehicle arrives at a cluster before its time window opens.
-
5 Conclusions 18
The aggregated results for each instance class are shown in Table 11, which shows that the total
times of the delivery routes are composed mainly of service times (46% on average) followed by
travel times (32% on average). These results highlight the relevance of considering the service
time as dependent on the number of deliverymen and, in turn, the need to consider the number
of deliverymen as a decision variable. This structure of the times in the delivery routes can be
observed in real-life applications, especially in the distribution of beverage and dairy products in
highly congested urban areas. In those situations, service times can account for up to 50% of
the total route times. This fact is one of the main motivations for the study of the VRPTWMD
(Pureza et al., 2012). The times for the solutions of the classes C1 and C2 are dominated by waiting
times, because in these instances the clusters are grouped in geographical space and, hence, vehicles
spend more time waiting at the clusters than they do traveling between the parking locations for
the clusters.
Next, we analyze scenarios that impose different limits on the numbers of deliverymen on board,
as in practice it may be valuable to present such solution alternatives. To perform these tests, we
used the hybrid method, varying the maximum number of deliverymen allowed on board between
one and four. To evaluate these scenarios, we used the instances in class R1, enforcing a time limit
of one hour. The results are presented in Table 12.
It can be observed that increasing the limit of the crew size on board also increases the total
number of deliverymen used, on average. However, this increase allows the solution to use a
smaller number of vehicles and, therefore, reduces the average cost of the solutions. This result
highlights the compromise between the costs involved, because it is beneficial to invest in additional
deliverymen to reduce the service times, enabling the use of fewer vehicles and hence reducing the
total cost of the system. Nevertheless, it is worth mentioning that for most instances of class R1
the hybrid method stopped without proving optimality due to the imposed time limit; therefore,
the obtained solutions can be non-optimal and, consequently, the results of these analyses should
be interpreted cautiously.
ClassTime
Travel Service Waiting
R1 49% 46% 5%RC1 53% 44% 3%C1 10% 45% 45%R2 36% 52% 12%RC2 40% 48% 12%C2 7% 41% 52%
Avg 32% 46% 22%
Tab. 11: Composition of times in the routes of the different instance classes.
5 Conclusions
This paper presented a hybrid method for the VRPTWMD that combines a branch-price-and-cut
algorithm with two metaheuristic approaches. The proposed cooperative scheme aims at improving
the ability of the BPC algorithm to generate good integer solutions at an earlier stage. The results
of the computational experiments show that the developed method outperforms the BPC algorithm
used as a standalone method in some classes of instances. In particular, the hybrid method is faster
in most instances that are solved to optimality by both methods. Moreover, for instances that are
not solved to optimality, the hybrid method provides, on average, better feasible solutions. These
-
5 Conclusions 19
Inst1 deliveryman Up to 2 deliverymen Up to 3 deliverymen Up to 4 deliverymen
Cost Veh Del Cost Veh Del Cost Veh Del Cost Veh DelR101 40.94 37 37 26.99 23 38 23.67 19 45 22.17 17 50R102 35.41 32 32 25.27 22 31 20.95 17 38 19.75 16 36R103 25.48 23 23 16.64 14 25 15.84 13 27 14.94 12 28R104 22.15 20 20 14.42 12 23 12.61 10 25 12.11 9 30R105 28.80 26 26 19.25 16 31 17.55 14 34 16.34 12 42R106 24.38 22 22 16.64 14 25 15.13 12 30 13.63 10 35R107 23.26 21 21 14.52 12 24 12.81 10 27 12.21 9 31R108 22.15 20 20 14.31 12 22 11.70 9 26 10.99 8 29R109 24.37 22 22 16.74 14 26 14.23 11 31 13.62 10 35R110 23.27 21 21 15.73 13 26 13.02 10 29 12.31 9 32R111 23.26 21 21 14.52 12 24 12.82 10 27 12.21 9 31R112 22.15 20 20 14.41 12 23 11.70 9 26 11.00 8 29
Avg 26.30 23.75 23.75 17.45 14.67 26.50 15.17 12.00 30.42 14.27 10.75 34.00
Tab. 12: Results for different maximum numbers of deliverymen allowed on board.
results reveal the advantages of using specific heuristic algorithms to obtain good feasible solutions
within an exact method, especially for shorter time limits because the heuristic component helps
to find reasonably good feasible solutions at an earlier stage. In summary, the results show that
using fast heuristic algorithms within an exact method is a promising line of research that is
also extensible to other vehicle routing problems. Additional analyses indicate the importance of
considering the number of deliverymen in the routes as a decision variable together with routing
and scheduling decisions.
In future research the hybrid method can be adapted to tackle several VRPTWMD variants that
consider other practical characteristics such as multiple depots, simultaneous pickup and delivery
and a heterogeneous fleet. Finally, it would be interesting to take uncertainty into account in the
context of multiple deliverymen, in particular regarding service and travel times.
Acknowledgments
This research was partially supported by CAPES-DS (Coordination for the Improvement of Higher
Education Personnel, Brazil), FAPESP (Sao Paulo Research Foundation, Brazil, project 2014/00939-
8) and CNPq (National Council of Technological and Scientific Development, Brazil, project
482664/2013-4).
References
Achterberg, T., Koch, T., and Martin, A. (2005). Branching rules revisited. Operations Research
Letters, 33(1):42–54.
Akpinar, S. (2016). Hybrid large neighbourhood search algorithm for capacitated vehicle routing
problem. Expert Systems with Applications, 61:28–38.
Alvarenga, G., Mateus, G., and De, Tomi, G. (2007). A genetic and set partitioning two-phase
approach for the vehicle routing problem with time windows. Computers & Operations Research,
34(6):1561–1584.
Álvarez, A. and Munari, P. (2016). Metaheuristic approaches for the vehicle routing problem
with time windows and multiple deliverymen. Journal of Management & Production (Gestão e
Produção), 23(2):279–293.
-
5 Conclusions 20
Archetti, C., Bouchard, M., and Desaulniers, G. (2011). Enhanced branch and price and cut for
vehicle routing with split deliveries and time windows. Transportation Science, 45(3):285–298.
Archetti, C., Speranza, M. G., and Savelsbergh, M. W. P. (2008). An optimization-based heuristic
for the split delivery vehicle routing problem. Transportation Science, 42(1):22–31.
Azi, N., Gendreau, M., and Potvin, J. Y. (2014). An adaptive large neighborhood search for a
vehicle routing problem with multiple routes. Computers & Operations Research, 41(1):167–173.
Baldacci, R., Bartolini, E., and Mingozzi, A. (2011). An exact algorithm for the pickup and delivery
problem with time windows. Operations research, 59(2):414–426.
Cacchiani, V., Hemmelmayr, V. C., and Tricoire, F. (2014). A set-covering based heuristic algorithm
for the periodic vehicle routing problem. Discrete Applied Mathematics, 163:53–64.
Chen, Z.-L. and Xu, H. (2006). Dynamic column generation for dynamic vehicle routing with time
windows. Transportation Science, 40(1):74–88.
Clarke, G. and Wright, J. W. (1964). Scheduling of vehicles from a central depot to a number of
delivery points. Operations Research, 12:568–581.
Danna, E. and Le Pape, C. (2005). Branch-and-price heuristics: A case study on the vehicle routing
problem with time windows. In Desaulniers, G., Desrosiers, J., and Solomon, M. M., editors,
Column Generation, pages 99–129. Springer.
De Franceschi, R., Fischetti, M., and Toth, P. (2006). A new ILP-based refinement heuristic for
vehicle routing problems. Mathematical Programming, 105(2-3):471–499.
Desaulniers, G., Lessard, F., and Hadjar, A. (2008). Tabu search, partial elementarity, and gen-
eralized k-path inequalities for the vehicle routing problem with time windows. Transportation
Science, 42(3):387–404.
Desaulniers, G., Madsen, O. B., and Ropke, S. (2014). The vehicle routing problem with time win-
dows. In Toth, P. and Vigo, D., editors, Vehicle Routing: Problems, Methods, and Applications,
pages 119–159. SIAM.
Desrosiers, J. and Lübbecke, M. E. (2010). Branch-Price-and-Cut Algorithms. John Wiley & Sons.
Ferreira, V. and Pureza, V. (2012). Some experiments with a savings heuristic and a tabu search
approach for the vehicle routing problem with multiple deliverymen. Pesquisa Operacional,
32:443–463.
Gauvin, C., Desaulniers, G., and Gendreau, M. (2014). A branch-cut-and-price algorithm for the
vehicle routing problem with stochastic demands. Computers and Operation Research, 50:141–
153.
Gondzio, J., González-Brevis, P., and Munari, P. (2013). New developments in the primal-dual
column generation technique. European Journal of Operational Research, 224(1):41–51.
Hauge, K., Larsen, J., Lusby, R. M., and Krapper, E. (2014). A hybrid column generation approach
for an industrial waste collection routing problem. Computers & Industrial Engineering, 71:10–
20.
-
5 Conclusions 21
Hong, L. (2012). An improved LNS algorithm for real-time vehicle routing problem with time
windows. Computers & Operations Research, 39(2):151–163.
Irnich, S., Toth, P., and Vigo, D. (2014). The family of vehicle routing problems. In Toth, P. and
Vigo, D., editors, Vehicle Routing: Problems, Methods, and Applications, pages 1–33. SIAM.
Jepsen, M., Petersen, B., Spoorendonk, S., and Pisinger, D. (2008). Subset-row inequalities applied
to the vehicle routing problem with time windows. Operations Research, 56(2):497–511.
Jourdan, L., Basseur, M., and Talbi, E.-G. (2009). Hybridizing exact methods and metaheuristics:
A taxonomy. European Journal of Operational Research, 199(3):620–629.
Kramer, R., Subramanian, A., Vidal, T., and Cabral, L. d. A. F. (2015). A matheuristic approach
for the pollution-routing problem. European Journal of Operational Research, 243(2):523–539.
Lourenço, H., Martin, O., and Stützle, T. (2003). Iterated local search. In Glover, F. and Kochen-
berger, G. A., editors, Handbook of Metaheuristics, pages 321–353. Springer.
Mladenovic, N. and Hansen, P. (1997). Variable neighborhood search. Computers & Operations
Research, 24:1097–1100.
Montgomery, D. C. (2008). Design and analysis of experiments. John Wiley & Sons.
Munari, P. and Gondzio, J. (2013). Using the primal-dual interior point algorithm within the
branch-price-and-cut method. Computers & Operations Research, 40(8):2026–2036.
Munari, P. and Gondzio, J. (2015). Column generation and branch-and-price with interior point
methods. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics,
3(1).
Munari, P., González-Brevis, P., and Gondzio, J. (2011). A note on the primal-dual column
generation method for combinatorial optimization. Electronic Notes in Discrete Mathematics,
37:309 – 314.
Munari, P. and Morabito, R. (2016). A branch-price-and-cut for the vehicle routing problem with
time windows and multiple deliverymen. Technical report, Industrial Engineering Department,
Federal University of São Carlos.
Nishi, T. and Izuno, T. (2014). Column generation heuristics for ship routing and scheduling
problems in crude oil transportation with split deliveries. Computers & Chemical Engineering,
60:329–338.
Osman, I. H. (1993). Metastrategy simulated annealing and tabu search algorithms for the vehicle
routing problem. Annals of operations research, 41(4):421–451.
Parragh, S. N. and Schmid, V. (2013). Hybrid column generation and large neighborhood search
for the dial-a-ride problem. Computers & Operations Research, 40(1):490–497.
Penna, P., Subramanian, A., and Ochi, L. S. (2013). An iterated local search heuristic for the
heterogeneous fleet vehicle routing problem. Journal of Heuristics, 19:201–232.
Pisinger, D. and Ropke, S. (2007). A general heuristic for vehicle routing problems. Computers &
Operations Research, 34:2403–2435.
-
5 Conclusions 22
Pureza, V., Morabito, R., and Reimann, M. (2012). Vehicle routing with multiple deliverymen:
Modeling and heuristic approaches for the vrptw. European Journal of Operational Research,
218(3):636–647.
Ropke, S. and Pisinger, D. (2006). An adaptive large neighborhood search heuristic for the pickup
and delivery problem with time windows. Transportation Science, 40:455–472.
Russell, R. and Chiang, W.-C. (2006). Scatter search for the vehicle routing problem with time
windows. European Journal of Operational Research, 169(2):606–622.
Salari, M., Toth, P., and Tramontani, A. (2010). An ILP improvement procedure for the open
vehicle routing problem. Computers & Operations Research, 37(12):2106–2120.
Santos, L. M., Munari, P., Costa, A. M., and Santos, R. H. (2015). A branch-price-and-cut method
for the vegetable crop rotation scheduling problem with minimal plot sizes. European Journal of
Operational Research, 245(2):581–590.
Schmid, V., Doerner, K. F., Hartl, R. F., and Salazar-González, J.-J. (2010). Hybridization of very
large neighborhood search for ready-mixed concrete delivery problems. Computers & Operations
Research, 37(3):559–574.
Senarclens de Grancy, G. and Reimann, M. (2016). Vehicle routing problems with time windows
and multiple service workers: a systematic comparison between ACO and GRASP. Central
European Journal of Operations Research, 24(1):29–48.
Shaw, P. (1998). Using constraint programming and local search methods to solve vehicle routing
problems. In Maher, M. and Puget, J., editors, Principles and Practice of Constraint Program-
ming - CP98, pages 417–431, Berlin, Heidelberg. Springer.
Silva, M. M., Subramanian, A., and Ochi, L. S. (2015). An iterated local search heuristic for the
split delivery vehicle routing problem. Computers & Operations Research, 53:234–249.
Solomon, M. (1987). Algorithms for the vehicle routing and scheduling problems with time window
constraints. Operations Research, 35(2):254–265.
Subramanian, A., Penna, P. H. V., Uchoa, E., and Ochi, L. S. (2012). A hybrid algorithm for
the heterogeneous fleet vehicle routing problem. European Journal of Operational Research,
221(2):285–295.
Subramanian, A., Uchoa, E., and Ochi, L. S. (2013). A hybrid algorithm for a class of vehicle
routing problems. Computers & Operations Research, 40(10):2519–2531.
Villegas, J. G., Prins, C., Prodhon, C., Medaglia, A., and Velasco, N. (2013). A matheuristic for the
truck and trailer routing problem. European Journal of Operational Research, 230(2):231–244.
Yildirim, U. M. and Çatay, B. (2014). A parallel matheuristic for solving the vehicle routing
problems. In Sousa, J. F. and Rossi, R., editors, Computer-based Modelling and Optimization in
Transportation SE - 35, volume 262, pages 477–489. Springer.
Related Documents





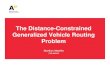
![[Vehicle Routing and Transportation 3] - Universiteit Hasselt · [Vehicle Routing and Transportation 3] D16 ... Algorithm for the Multi-Objective Vehicle Routing Problem with Time](https://static.cupdf.com/doc/110x72/5acb82947f8b9aa3298e93a2/vehicle-routing-and-transportation-3-universiteit-hasselt-vehicle-routing-and.jpg)