An Efficient Swarm Neighborhood Management for a 3D Tactical Simulator Russel Ahmed Apu, Marina L. Gavrilova Department of Computer Science, University of Calgary 2500 University Drive NW, Calgary, AB, Canada T2N 1N4 {[email protected] , [email protected] } Abstract The paper presents a unique utilization of the Dynamic Delaunay Triangulation (DT) to devise a highly efficient algorithm for the neighborhood adjacency management which is a crucial component of a swarm-based simulation. This algorithm allows fast computation of the swarm neighborhood which is required to implement Boids flocking rules. The method also provides an efficient mechanism to detect and manage object collisions. This unique utilization of DT based data structures was applied to a new 3D tactical swarm simulation called the Battle Swarm. The result was a very high speed of simulation, which made complex application of genetic evolution possible for goal-based swarms in a three dimensional space. The method's effective and complex emergent behavior was successfully demonstrated by the Battle Swarm Simulator. In addition, the experimental section confirms that the method was highly efficient and can be used in similar applications. Keywords Dynamic Delaunay Triangulation, Voronoi Diagram, Battle Swarm, Swarm Intelligence, Genetic Algorithm, Physically Based Modeling, DCEL. 1. Introduction: Swarm Intelligence (SI) is the property of a system whereby the collective behaviors of (unsophisticated) agents interacting locally with their environment cause coherent functional global patterns to emerge. SI provides a basis with which it is possible to explore collective (or distributed) problem solving without centralized control or the provision of a global model [4]. Agents in an SI based system have limited perception or intelligence and cannot individually carry out the task that is designated to the swarm. Nevertheless, by regulating the behavior of the agents in the swarm, one can demonstrate emergent behavior and intelligence as a collective phenomenon [14][18]. The Battle Swarm model is based on an interesting gaming scenario. It is a carefully chosen problem to reflect a more general goal-based 3D tactical swarm simulation [5]. In this simulation, there are two competing entities. Firstly, a Battle-ship with a complex 3D structure is deployed in free space. This structure is represented as set of polygons using DCEL [2]. Secondly, a swarm of missiles (point objects) are launched from a distance to attack and destroy the battle-ship. The battle-ship has multiple point defense energy cannons that are capable of firing at arbitrary direction at a specific rate of fire (predefined to 600 rounds per minute). The angular coverage of each turret is limited to a threshold (predefined to 30 degrees). A particular point defense cannon is only able to acquire and attack targets that are within its coverage zone (Fig. 1). Choice of the target is acquired based on a Threat of Approach function. Once the target is chosen, a firing solution for each turret is obtained numerically by extrapolating the missiles current trajectory. Figure 1: Figure 1: Figure 1: Figure 1: Space battle tactics simulation: missiles versus point defense

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

An Efficient Swarm Neighborhood Management for a 3D Tactical Simulator
Russel Ahmed Apu, Marina L. Gavrilova
Department of Computer Science, University of Calgary
2500 University Drive NW, Calgary, AB, Canada T2N 1N4
{[email protected], [email protected]}
Abstract
The paper presents a unique utilization of the
Dynamic Delaunay Triangulation (DT) to devise a
highly efficient algorithm for the neighborhood
adjacency management which is a crucial component
of a swarm-based simulation. This algorithm allows
fast computation of the swarm neighborhood which is
required to implement Boids flocking rules. The
method also provides an efficient mechanism to detect
and manage object collisions. This unique utilization of
DT based data structures was applied to a new 3D
tactical swarm simulation called the Battle Swarm. The
result was a very high speed of simulation, which made
complex application of genetic evolution possible for
goal-based swarms in a three dimensional space. The
method's effective and complex emergent behavior was
successfully demonstrated by the Battle Swarm
Simulator. In addition, the experimental section
confirms that the method was highly efficient and can
be used in similar applications.
Keywords
Dynamic Delaunay Triangulation, Voronoi
Diagram, Battle Swarm, Swarm Intelligence, Genetic
Algorithm, Physically Based Modeling, DCEL.
1. Introduction:
Swarm Intelligence (SI) is the property of a system
whereby the collective behaviors of (unsophisticated)
agents interacting locally with their environment cause
coherent functional global patterns to emerge. SI
provides a basis with which it is possible to explore
collective (or distributed) problem solving without
centralized control or the provision of a global model
[4]. Agents in an SI based system have limited
perception or intelligence and cannot individually carry
out the task that is designated to the swarm.
Nevertheless, by regulating the behavior of the agents
in the swarm, one can demonstrate emergent behavior
and intelligence as a collective phenomenon [14][18].
The Battle Swarm model is based on an interesting
gaming scenario. It is a carefully chosen problem to
reflect a more general goal-based 3D tactical swarm
simulation [5]. In this simulation, there are two
competing entities. Firstly, a Battle-ship with a
complex 3D structure is deployed in free space. This
structure is represented as set of polygons using DCEL
[2]. Secondly, a swarm of missiles (point objects) are
launched from a distance to attack and destroy the
battle-ship. The battle-ship has multiple point defense
energy cannons that are capable of firing at arbitrary
direction at a specific rate of fire (predefined to 600
rounds per minute). The angular coverage of each
turret is limited to a threshold (predefined to 30
degrees). A particular point defense cannon is only
able to acquire and attack targets that are within its
coverage zone (Fig. 1). Choice of the target is acquired
based on a Threat of Approach function. Once the
target is chosen, a firing solution for each turret is
obtained numerically by extrapolating the missiles
current trajectory.
Figure 1:Figure 1:Figure 1:Figure 1: Space battle tactics simulation: missiles versus point defense

This kind of simulation requires a significant
amount of computation to even process one frame of
the simulation [14][18]. To apply genetic algorithm for
complex emergent behavior the simulation must be
executed for hundreds of generations resulting in
millions of simulation steps [11]. As a result, the
efficiency of the simulation becomes a major factor in
deciding whether or not a 3D simulation of such
magnitude of complexity is even feasible. In general,
majority of the computational tasks in such a
simulation can be divided into the following processes:
• Computation of neighborhood based on circle
of influence
• Collision detection and response
• Computation of cone of influence for each
point defense
This paper presents a unique utilization of the
Randomized Incremental Delaunay Triangulation
method to devise a highly efficient technique to aid the
three aforementioned processes [13]. The method is
found to be effective and reliable. It is simple to
implement and can be applied to a variety of similar
3D spatial temporal simulations [4].
2. Literature Survey
Behavioral studies among social biological entities
such as insects were of interest for scientists for a long
time [3][4][15]. Flight formation of a flock of birds
[16], stratification and construction of an ant/termite
colony [3][15] or a school of fish swimming in
formation [7][16] are all surprisingly complex tasks
given the intelligence of each individual agent.
Recently, biologists and computer scientists in the field
of artificial life have modeled biological swarms to
understand how social animals interact, achieve goals,
and evolve [4][14][15]. Engineers also become
increasingly interested in swarm behavior since the
resulting swarm intelligence can be applied in
optimization (e.g. in telecommunicate systems)
[5][11], robotics [5][7][18], traffic patterns in
transportation systems [17] and military applications
[5][7]. The idea of using SI for battle tactics and war
games is relatively new and active area of research [7].
However, because of the complexity of these systems,
it cannot be modeled efficiently using a conventional
swarm simulation engine.
In our study, we discovered that a majority of the
commercial swarm simulations employ inefficient
algorithms to determine the neighborhood of agents
and implements simple collision techniques by limiting
to point, spherical and planar objects. The use of such
methods is feasible only if a certain flocking logic is
being tested or a small scale evolutionary system is
being developed [16]. Therefore, for more complex
simulations such as the one outlined in this paper, a
sophisticated and efficient algorithm is required to
handle the task of neighborhood management and
collision detection in three dimensions.
We identified several popular approaches for
collision detection and neighborhood management in
the literature. First technique is a simple grid based
approach [2]. Although this method is fairly effective,
it is found to be inefficient in dynamic environment
where congestion or dispersion may arise periodically.
Another popular approach is to use K-D Tree based
methods for efficient query of proximal information
[1][2][9]. These methods relatively more efficient for
query, however, they require significant build time for
the data structure that may render the whole simulation
inefficient. Last but not the least, an efficient
triangulation method can be employed, where a full
construction of the data structured is carried out at the
beginning of the simulation and at each step the
structure is revised by taking advantage of the spatial-
temporal coherence [8][13]. The Delaunay
Triangulation [6] method is the prime candidate in this
category for several reasons. Firstly, it is a robust data
structure for proximity management [9]. Secondly, it is
a dual of a Voronoi Diagram and therefore rich in
many useful geometric properties [9][10]. Finally, a
broad domain of literature is dedicated to the analysis
and improvement of this method rendering it a highly
efficient and well studied data structure in
computational geometry [6][8][9][12][13].
After careful consideration, we propose to use
Delaunay Triangulation for the aforementioned
problem and employ a clever scheme for collision and
neighborhood management. The paper is organized as
followed. Section three provides a detailed description
of the problem followed by the description of the data
structures and techniques employed. Section four
provides the analysis and experimental results. This is
followed by the summary and conclusion in Section 5.
3. Method Description
In this section, we outline the problem as a special
class of swarm simulation in three dimensions that
employs complex emergent strategies and outline its
solution. The simulation framework is generic and can
be applied to most three dimensional swarm
simulations. Later, we provide a novel approach to
compute swarm adjacency and neighborhood
management for the problem described below.

3.1. The Game of the Battle Swarms
For the simulation of emergent complex strategy,
we devised a game carefully chosen to reflect the
complexity of a goal-based 3D tactical swarm system
[5][7]. The game is based on attack, evasion and
defense. While the missile sets strategy to strike the
target, the battle ship prepares to shoot down as many
missiles as possible. Each attempt to destroy the target
is called an Attack-Run. The effectiveness of an
Attack-Run equals to the number of missiles hitting the
target. Therefore, the outcome of the game is easily
quantifiable.
On the other hand, the interaction between missiles
and the battleship is complex and nontrivial. As a
result, war strategies may emerge in which a local
penalty (i.e. sacrificing a missile) can optimize global
efficiency (i.e. deception strategy).
The following sub section clearly identifies the
objects and the context of the game:
• The Missile: The limited capability of a missile
makes it an excellent candidate for a swarm-based
agent. Each missile has a pool of basic actions (Fig.
2) it can carry out (i.e. roll and pitch). Each missile is
autonomous and decides its course of action based
on the location of the target, incoming fire and other
missiles within the limited sensory range. Each
missile has to choose between following other
missiles or the target. This behavior of following
peers is known as the Boids Flocking (Fig. 3) [16].
• The Battle Ship Defense: The Battle-ship defense
includes several point defense turrets. Each turret
evaluates all visible targets within the range using a
threat function and selects the missile that poses the
highest threat. This is done by computing a list of
missiles within a conic coverage zone for each turret.
The turret computes a firing solution based on the
trajectory of the missile. A divergence probability is
estimated by analyzing the last few actions of the
missile and the region of uncertainty (Fig. 1).
3.2. The Computational Complexity
The computational complexity of the system arises
from the fact that agents (such as missiles and turrets)
interact with each other based on local information
such as proximity, coverage, visibility etc. [3][4].
These computational challenges exist not only in the
problem stated above but most swarm-based
simulations in general. Furthermore, the complexity is
increased significantly in three dimensions [7][19] over
some of the two dimensional simulations (i.e.
simulation of human crowd on a plane [14]).
To understand the requirement for the data-structure
optimization, it important to design a robust and
predictive dynamic system. Therefore, we propose the
following system of equation for the missile dynamics:
( )
21
2
tt t
damp
t t t t
k x x tx
x x x t x t
+∆
+∆
+ ∆ = + ∆ + ∆
� ���
� ��
(1)
Here , t t t tx x+∆ +∆
� are the new position and velocity
of a node respectively and , , t t tx x x� �� are the last
positions, velocity and acceleration. t∆ is the time-
step interval and dampk is the kinetic dampening
constant. This system of forward differential equations
is predictive in a sense that regardless of the discrete
Figure 2: Figure 2: Figure 2: Figure 2: The control mechanism for missile navigation
Figure Figure Figure Figure 3333:::: Boids flocking rule: Peers in the inner sphere are deflected while the node is attracted
towards peers inside the outer sphere.

time-stepping interval, the system can be made to
converge to a terminal velocity for each dynamic
object. This terminal velocity maxx� can be specified by
computing corresponding dampening constant dampk as
followed:
max
1damp
x tk
x
∆= −��
� (2)
The dynamic system described above provides a
predictive motion pattern. In a predictive system, a
position can be estimated from a particular trajectory
pattern (i.e. a circular trajectory). In ordinary forward
Euler dynamic system, the trajectory prediction is not
possible because the accumulative error vary widely
based on particle speed and status of acceleration. By
using a terminal velocity and carefully chosen
dampening equation, we minimize the variation of
accumulative errors during the time stepping. This
important property is required to obtain a firing
solution.
Because of the terminal velocity, and the temporal
cohesion observed in Boids Flocking [16], the dynamic
objects in the scene satisfy a frame-to-frame coherence
property. An optimized data structure needs to take
advantage of this property, imposing minimal
computational load over a given interval.
The task of the computational engine of a 3D
swarm simulation is several-fold. Firstly, it must
present the Agent’s AI callback, with a list of
neighbors within a given spherical region of influence
(Fig. 3). This requires the preparation of a
neighborhood table in which, Row i contains the list
of peers that are within the outer spherical region of
radius outerR (Fig. 3). A similar table is also required
for the conic coverage of turrets. Finally, a table of
collision needs to be constructed, where each row
stores a list of swarm agents that are in contact with the
stationery object. To provide these solutions, we
propose to use the Dynamic Delaunay Triangulation
data structure which is more robust and efficient than
other static data structures such as the regular grids and
TIN [2][8][9]. The following subsections discussed the
general incremental DT algorithm and our unique
scheme to solve the aforementioned computational
problems.
3.3. The General Delaunay Triangulation
The Delaunay Triangulation is a useful data
structure in computational geometry because it is a
dual of a Voronoi Diagram [2][6][10]. Since the DT
has an edge for every pair of adjacent VD regions, it is
connected to its nearest neighboring sites [2]. This
construct allows a robust adjacency/proximity
representation that can be used in many geometric
problems. In our case, the connectivity of DT can be
directly used to compute the neighborhood of the
swarm agents. In addition, the border edges of the DT
forms the Convex Hull of the point set [2]. Therefore,
it can be used to compute the collision table efficiently.
The conic influence table can be constructed by
approximating a cone by four bounding half planes and
performing an inclusion test.
It has been shown that a 2D DT can be constructed
by a randomized algorithm in ( log )O n n time [6] and
with certain optimizations it could be constructed in
linear expected time in the average case [13]. The 3D
DeWall incremental algorithm is relatively more
complicated [12]. It can be constructed in 3( )O n
worst case time although the expected time reported
can be lower (i.e. Quadratic runtime) [13].
(a)(a)(a)(a) (b)(b)(b)(b) (c)(c)(c)(c)
Figure 4:Figure 4:Figure 4:Figure 4: Incremental Construction of the Delaunay Triangulation. (a)(a)(a)(a) Insertion of a new site
(b)(b)(b)(b) Perform the in-circle test (c)(c)(c)(c) Flip and perform in-circle test recursively

The most popular incremental approach to DT
construction is outlined below. First, a bounding
triangle is built such that it includes all sites. At each
step, a random site is chosen and inserted in the DT
structure. For that purpose, the bounding simplex
(triangle or tetrahedron) of the site is identified and
subdivided to include the new site. After that, each
opposite edge is tested for its in-circle property (or in-
sphere property in 3D) and the edge/face is flipped if
this property is violated. If a flip operation is actuated,
then a recursive in-circle test is executed for the new
opposing sides. The insertion is complete when all the
neighboring edges pass the test.
3.4. The Dynamic Layered Delaunay
Triangulation (LDT)
We discovered that the actual implementation of the
3D DT is not only a difficult task, but also the runtime
is far too inefficient for practical use when applied to a
large number of dynamic swarm particles. Therefore,
we propose the following novel solution.
We propose that the entire spatial bound be divided
into K regions and for each region a planar DT is
computed by projecting the points along the principle
axis (Fig. 5). The neighborhood of a site is then the
union of its entire neighborhood in the K set of DT.
The first step in this algorithm is to find the Axis
Aligned Bounding Box (AABB) of the swarm sites
(fig. 5a) [2]. In each simulation two Principle axes (two
of the X, Y and Z axis) are chosen. They are called the
splatting axis. Although for this algorithm, any choice
of splatting axes may suffice, carefully choosing a
subset may enhance performance. A rule of thumb we
determined was to choose the two splatting axes that
have the minimal spatial dispersion during the overall
simulation. In other word, we exclude the axis that is
along the longest edge of all AABBs. The reason for
doing this is to minimize the thickness of each slab.
For example, because of the way the missile swarms in
our application are generated (Large X-Axis offset)
with respect to the location of the target (origin), the Y
and Z axis were chosen as the splatting axes.
(a)(a)(a)(a) Three initial quadrants (b)(b)(b)(b) Left quadrant expanding (c)(c)(c)(c) execution of Case 5 & right quadrant shrinking
Figure Figure Figure Figure 6666:::: Execution of the Merge/split process in Method 1, Case 5.
(a)(a)(a)(a) Global AABB (b)(b)(b)(b) Subdivision along (c)(c)(c)(c) Projection along splatting axis one of the splatting axis and construction of an LDT
Figure 5:Figure 5:Figure 5:Figure 5: Construction of the Layered Delaunay Triangulation.

The next step is to divide the global swarm AABB
into K quadrants (Fig 5b). Each quadrant assumes the
boundary of the global AABB except the splatting
axis. At each step, the quadrant containing the maximal
splatting axis dispersion is selected and divided. For
robustness additional conditions may be imposed. One
important condition is that at least 2 divisions must
exist for each splatting axis. This guarantees that every
point is included in atleast two mutually orthogonal
quadrants.
For each of these K regions, the points are projected
along the splatting axis on a plane and a DT is
computed and stored (Fig. 5c). For the dynamic
maintenance of the data structure the following
algorithm must be invoked at each computational time-
step:
Method 1: Adjust Layered DT
For each swarm node in the system consider the
following cases:
1. Internal Transition: The swarm node remains in
the same quadrant, however, the length of one of
its edges changes by a threshold τ (i.e. 85%τ =
in Battle Swarm). This node is marked as invalid,
and the recursive in-circle test is applied at a later
step.
2. Inter-quadrant Transition: When a node crosses
the planar boundary between two adjacent
quadrants (along the splatting axis), the node is
deleted from the old quadrant. The linked vertices
are triangulated and the circle test is performed
accordingly. The node is then added to the new
quadrant (standard DT point insertion).
3. External Transition: The swarm node exits the
boundary of the current quadrant outside the
AABB. In this case, the boundary is extended to
include the point and the region grows (Fig. 6).
4. Collapsing Transition: When a quadrant has no
swarm nodes, it is deleted. The quadrant with the
maximum splatting axis dispersion is split in two.
5. Size Optimization Transition: First, two adjacent
quadrants with the least dispersion is chosen. If
their combined dispersion is less than the quadrant
with the largest splatting axis dispersion then the
region pair is merged and the largest quadrant is
split into two quadrants (Fig 6). Each execution
loop can have at most one such transition.
All split/merge operation is carried out by
reconstructing the Delaunay Triangulation(s). One
important thing to be mentioned here is that the swarm
simulation does not require a precise Delaunay
Triangulation. Degeneracy can be allowed to a certain
extent so that the number of flips is minimized. In our
case, the edge tolerance 85%τ = was a good choice
reducing the number of flips significantly and yet
minimally affecting the neighborhood computation.
The choice of τ vary depending on the swarm density
and the motion pattern. The value of τ can be
determined by a simple trial and error method before
the execution of the Genetic Algorithm.
For optimization purpose, the actual algorithm for
case 1 in Method 1 was implemented in a separate step.
This is carried out by marking the opposite vertex pair
of all offending edge and then adjusting each marked
vertex.
3.5. Computation of the Swarm Neighborhood
and the Collision Table
The computation of the swarm neighborhood is a
straight-forward task given the layered DT
representation. A general algorithm is given below:
Method 2: Compute Neighborhood
Input: DT[], K
Output: NB[]
1. Proc. Neighbors(DT[], K, NB[]) 2. Initialize(NB)
3. for i�1 to K do
4. for each Edge e in NB[i] do
5. if Length[e]< outerR then
6. AddTable(NB,e.v1,e.v2)
This algorithm functions by assuming that each
node belongs to more than one overlapping orthogonal
LDT. Therefore, the union of the nearest neighbors
obtained from those LDT, compose the three
dimensional neighborhood of a node. For example, if a
node is near the wall of a quadrant and misses
neighbors located in the adjacent quandrant then the
orthogonal quadrant containing that node will also
contain the nodes that were missed by the first
quadrant.
The test for collision is also very simple. At a
preprocessing step, the convex hull of the static object
is computed by projecting the 3D polygonal model
along the splatting axis. The collision test is performed
by quick elimination of points belonging to a quadrant
that does not include the stationery object. For
intercepting quadrants, each point is filtered through a
bounding box test followed by a quick convex hull
intersection test. If a point passes this intersection test
for each quadrant it belongs to, a line-polygon
intersection test is performed between the 3D
representation of the object and the line between the
last two consecutive positions of the node. This
method is both precise and highly efficient.
Finally, the conic coverage is computed by
approximating to four half planes for each cone and
finding the intersection with a bounding region when it
is created (or modified). Points are tested quickly for
inclusion by a series of orientation tests. If an accurate
conic coverage is required, an additional angular test
can be performed on the points that passed the previous
point-plane orientation tests. Points that are in the
frustum but not inside the cone can be eliminated this
way.
4. Analysis of the result:
It should be noted first that in a swarm simulation,
the neighborhood table need not be precise. For
example, it does not matter if the number of neighbors
identified for a node is 6 when there should be 8 (2
neighbors are missed). If such is the case, the Boids
flocking is minimally affected. We executed a
simulation with known characteristics and discovered
that even with a 20% degeneracy, there is no
noticeable difference in the result or the flocking
behavior of the swarm. In our implementation, the
degeneracy rate is approximately 4.6% with 85%τ =
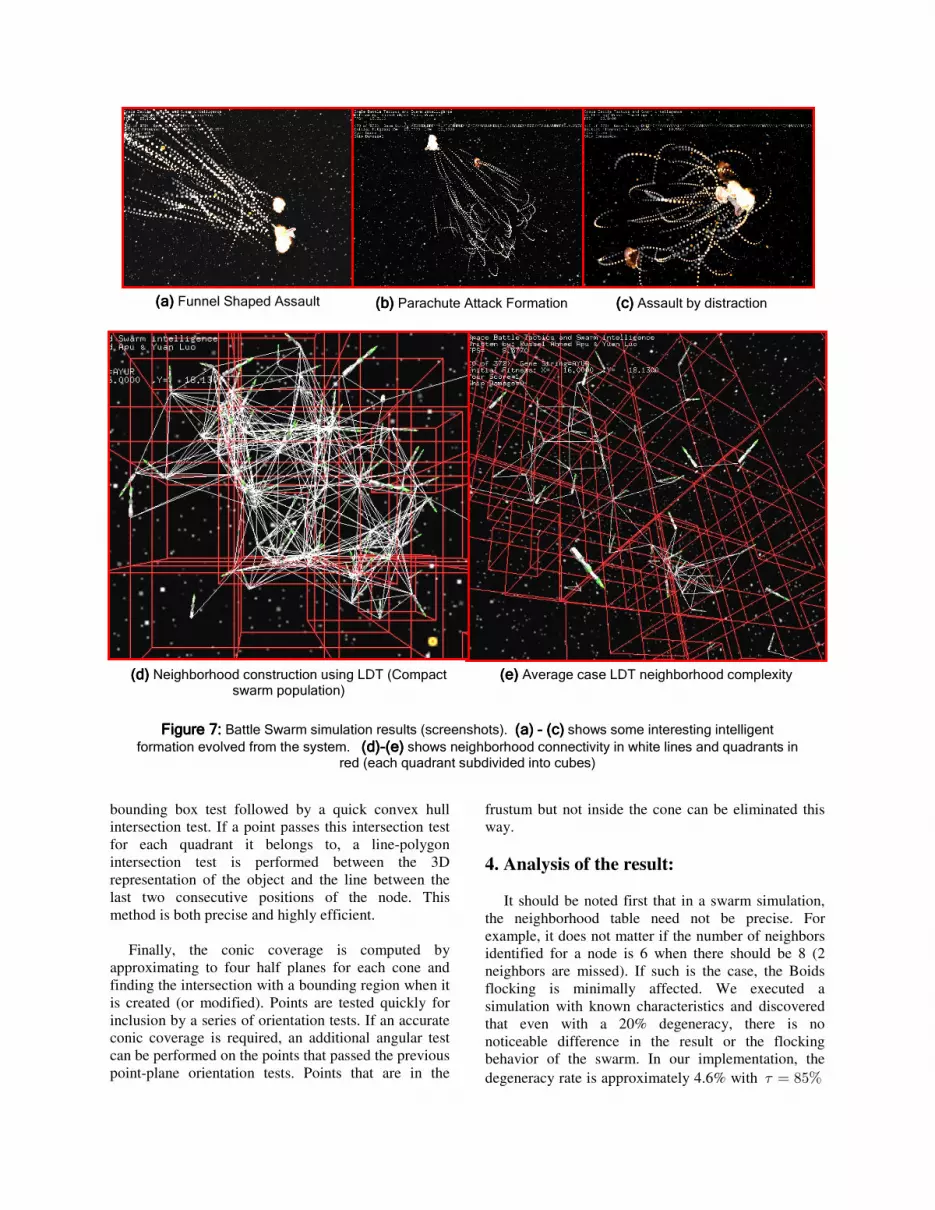
(a)(a)(a)(a) Funnel Shaped Assault ((((bbbb)))) Parachute Attack Formation
Figure 7:Figure 7:Figure 7:Figure 7: Battle Swarm simulation results (screenshots). (a) (a) (a) (a) –––– (c) (c) (c) (c) shows some interesting intelligent
formation evolved from the system. (d)(d)(d)(d)----(e)(e)(e)(e) shows neighborhood connectivity in white lines and quadrants in red (each quadrant subdivided into cubes)
((((cccc)))) Assault by distraction
((((dddd)))) Neighborhood construction using LDT (Compact swarm population)
((((eeee)))) Average case LDT neighborhood complexity

and K=8 (number of swarms, n=500). One important
aspect is that most swarm simulation provides an inner
radius that prevents nodes from overcrowding. This
makes the application of Layered DT highly effective
for such swarm problems.
It may appear from the algorithm that the system is
performing too much computation for neighborhood
and collision management. We now show that this is
not the case. Firstly, we know that a DT is a planar
Graph. As a result, it can be shown that the system has
at most ( )O n K− edges. Since K is a constant, the
algorithm in Method 2 executes in ( )O n time. The
only large computation is the first construction of the
K Layered DT in ( log )O n n time. By careful
implementation of the algorithm, it can be carried out
in linear expected time. After that, the only
computation needed to maintain the data structure is
Method 1. Although Case 1 has a worst case runtime
of ( log )O n n , in reality the average runtime is
(1)O due to frame-to-frame coherence and degenerate
edge tolerance τ . Case 2-4 also executes in roughly
constant time (or at least less than linear time). The
only major operation is Case 5 in which a merge and
split operation is applied on the LDT Structures. The
worst case runtime is ( log )O n n . But our analysis of
the runtime measurements indicates that the actual
execution takes less than linear time. Firstly, when a
split or merge occurs, one of the merged quadrants
usually contains very few nodes. Similarly, the newly
created quadrant (called a leading front) has minimal
number of nodes. In addition, the occurrences of Case
5 is sparse (occurs when the global formation of the
swarm gets dispersed, shrunk or displaced
significantly). As a result, the overall execution of
Method 1 is highly efficient.
To perform a runtime analysis we implemented the
entire swarm system including the computational,
rendering and GA engine. The application was
executed in an AMD Sempron XP™ 1.8GHz
workstation with an ATI Radeon graphics adapter. The
performance was measured using the Windows Query
Interface API which is accurate to several
microseconds. When measurement was taken, we
switched off non critical sub-systems such as UI,
rendering and particle engine.
The runtime performance of the system was
unprecedented. With approximately 100 nodes we
were able to achieve approximately 357 FPS. At this
rate, we were able to evolve a 1000 generations in less
than 5 hours on a single workstation. The frame rate
drops to 97.2 FPS when the number is nodes is
increased to 500 (and K=12). Some interesting results
are provided in Fig. 7. These are screen shots taken
directly from the Battle Swarm application. Fig. 7(a-c)
demonstrates that using our method it is possible to
achieve sophisticated evolutionary swarm intelligence.
Fig 7(d-e) visualizes the neighborhood connectivity in
different context using our method. Thus, we conclude
that the method was highly effective and efficient.
5. Conclusion:
In this paper, we presented a novel utilization of the
Delaunay Triangulation to solve the neighborhood
computation problem of a 3D tactical swarm
simulation called the Battle Swarm. The method was
robust, easy to implement and yet highly efficient. The
experimental section indicates that the performance of
this new method was unprecedented. This new method
would help designing complex 3D swarm simulations
that can exhibit complex strategic swarm intelligence.
Finally, the idea of utilizing a layered Dynamic
Delaunay Triangulation to resolve neighborhood and
collision of the battle swarm is unique and can be also
used in other applications.
6. Acknowledgement:
This project was funded partially by the NSERC
and the GEOIDE grant.
7. References
[1] Benitez, A., Ramirez, M. C. and Vallejo, D.
Collision Detection Using Sphere-Tree
Construction, 15th International Conference on
Electronics, Communications and Computers
(CONIELECOMP'05), pp. 286-291, 2005.
[2] Berg, M. D., et al. Computational Geometry:
Algorithms and Applications, Springer-Verlag
Berlin Heidelberg, ISBN 3-540-61270-X, 1997.
[3] Bonabeau, E. Stigmergy (special issue). Artificial
Life, 5(2).
[4] Bonabeau, E., Dorigo, M. and Theraulaz, G.
Swarm Intelligence: From Natural to Artificial
Systems, NY: Oxford Univ. Press, 1999
[5] Cebrowski, A. K., et al., Network Centric
Warfare: Its Origin and Future. Proceedings of the
Naval Institute, No. 124(1), pp 28-35, 1998.
[6] Cignoni, P., Montani, C., and Scopigno, R. A Fast
Divide and Conquer Delaunay Triangulation
Algorithm in Ed. Computer-Aided Design,
Elsevier Science, vol.30(5), April 1998, pp.333-
341.
[7] Doty, K. L., et al. An Autonomous Micro-
Submarine Swarm and Miniature Submarine

Delivery System Concept. In Proceedings of the
Florida Conference on Recent Advanced in
Robotics (Melbourne, Florida). pp 131-138, 1998.
[8] Edelsbrunner, H., Preparata, F. P. and West, D. B.
Tetrahedrizing point sets in three dimensions.
J. Symbolic Comput., 10(3-4), pp 335-347, 1990.
[9] Gavrilova, M, and Rokne, J. Collision detection
optimization in a multi-particle system,
International Journal of Computational Geometry
and Applications, vol 13 No 4, August 2003.
[10] Gavrilova, M. and Rokne, J. “Updating the
Topology of the Dynamic Voronoi Diagram for
Circles in Euclidean d-dimensional Space”.
Journal of Computer Aided Geometric Design, vol
20, pp 231-242, 2003.
[11] Iba, H. Emergent cooperation for multiple agents
using genetic programming. Parallel Problem
Solving from Nature. Berlin, 1996.
[12] Joe, B. Construction of three-dimensional
Delaunay triangulations using local
transformations. Comput. Aided Geom. Design,
8(2):123-142, May 1991.
[13] Mücke, E., Saias, I., and Zhu, B. Fast Randomized
Point Location without Preprocessing in Two- and
Three-dimensional Delaunay Triangulations.
Proceedings of the 12th Annual Symposium on
Computational Geometry, pages 274-283, 1996.
[14] Raupp, S. and Thalmann, D. Hierarchical Model
for Real Time Simulation of Virtual Human
Crowds, IEEE Transactions on Visualization and
Computer Graphics 7(2) (2001) 152-164
[15] Resnick, M. Turtles, Termites, and Traffic Jams
Explorations in Massively Parallel Microworlds.
MIT Press, 1997
[16] Reynolds, C. W. Flocks, Herds, and Schools: A
Distributed Behavioral Model, in Computer
Graphics, 21(4) (SIGGRAPH '87 Conference
Proceedings), 1987, pp. 25-34.
[17] Sauter, J. A., et al. Performance of digital
pheromones for swarming vehicle control.
Proceedings of the fourth international joint
conference on Autonomous agents and multiagent
systems AAMAS, 2005, pp. 903-910.
[18] Shen, W. M., Will, P., Galstyan, A., and Chuong,
C. M. Hormone-Inspired Self-Organization and
Distributed Control of Robotic Swarms,
Autonomous Robots, Volume 17 Issue 1, 2004,
pp. 700-712.
Related Documents











