Computers & Geosciences 31 (2005) 319–328 An efficient 1D OCCAM’S inversion algorithm using analytically computed first- and second-order derivatives for DC resistivity soundings $ Nimisha Vedanti, Ravi P. Srivastava, John Sagode 1 , V.P. Dimri National Geophysical Research Institute, Council of Scientific and Industrial Research, Post Bag No. 724, Uppal Road, Hyderabad 500 007, India Abstract An efficient algorithm has been developed for 1D resistivity inversion problem using both first- and second-order derivatives, which are computed analytically. The second-order derivative matrix, which is not used in the OCCAM’s inversion, has been incorporated into the algorithm employing analytical expressions. Computation of complicated second-order derivatives in each iteration is circumvented by a new algorithm. These modifications result in stable convergence of the OCCAM’s inversion and in general, better misfit can be achieved specially for smoothing parameter, mo1: The modified inversion algorithm, coded in MATLAB was tested using two synthetic Schlumberger resistivity sounding examples. Its application has been illustrated with field data from south India. r 2004 Elsevier Ltd. All rights reserved. Keywords: Hessian matrix; Jacobian matrix; Schlumberger sounding; Newton’s method; Smoothing parameter 1. Introduction The OCCAM’s inversion algorithm was first intro- duced by Constable et al. (1987) to find the smoothest model that fits the magnetotelluric (MT) and Schlum- berger geoelectric sounding data. The method gained popularity in inversion studies and was applied to many investigations (LaBrecque et al., 1996; Siripunvaraporn and Egbert, 1996; Qian et al., 1997). In this scheme a highly nonlinear problem is formulated in a linear fashion, which obviates the computation of second- order derivatives that carry useful curvature information of the objective function. In this paper the 1D OCCAM’s algorithm has been improved by inclusion of second-order derivative matrix known as Hessian that is computed analytically. This leads to a quadratic equation approximation of the objective function. The modified algorithm has been tested on synthetic and real field resistivity sounding data. It is found that the modified algorithm is more stable and convergent than OCCAM’s inversion. The computation of second-order derivatives in Schlumberger resistivity sounding involves cumbersome piece of algebra and therefore these derivatives are computed numerically using finite difference schemes. This introduces many unacceptable errors and requires more computational time, which results in inaccurate curvature information that decides the step of descent where as computation of the derivatives analytically ARTICLE IN PRESS www.elsevier.com/locate/cageo 0098-3004/$ - see front matter r 2004 Elsevier Ltd. All rights reserved. doi:10.1016/j.cageo.2004.10.015 $ Code on server at http://www.iamg.org/CGEditor/index.htm. Corresponding author. Tel.: +91 40 234 34 600; fax: +91 40 234 34651. E-mail address: [email protected] (V.P. Dimri). 1 CSIR-TWAS Fellow.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
ARTICLE IN PRESS
0098-3004/$ - se
doi:10.1016/j.ca
$Code on serv�Correspond
fax: +9140 234
E-mail addr1CSIR-TWA
Computers & Geosciences 31 (2005) 319–328
www.elsevier.com/locate/cageo
An efficient 1D OCCAM’S inversion algorithm usinganalytically computed first- and second-order derivatives
for DC resistivity soundings$
Nimisha Vedanti, Ravi P. Srivastava, John Sagode1, V.P. Dimri�
National Geophysical Research Institute, Council of Scientific and Industrial Research, Post Bag No. 724, Uppal Road,
Hyderabad 500 007, India
Abstract
An efficient algorithm has been developed for 1D resistivity inversion problem using both first- and second-order
derivatives, which are computed analytically. The second-order derivative matrix, which is not used in the OCCAM’s
inversion, has been incorporated into the algorithm employing analytical expressions. Computation of complicated
second-order derivatives in each iteration is circumvented by a new algorithm. These modifications result in stable
convergence of the OCCAM’s inversion and in general, better misfit can be achieved specially for smoothing parameter,
mo1: The modified inversion algorithm, coded in MATLAB was tested using two synthetic Schlumberger resistivity
sounding examples. Its application has been illustrated with field data from south India.
r 2004 Elsevier Ltd. All rights reserved.
Keywords: Hessian matrix; Jacobian matrix; Schlumberger sounding; Newton’s method; Smoothing parameter
1. Introduction
The OCCAM’s inversion algorithm was first intro-
duced by Constable et al. (1987) to find the smoothest
model that fits the magnetotelluric (MT) and Schlum-
berger geoelectric sounding data. The method gained
popularity in inversion studies and was applied to many
investigations (LaBrecque et al., 1996; Siripunvaraporn
and Egbert, 1996; Qian et al., 1997). In this scheme a
highly nonlinear problem is formulated in a linear
fashion, which obviates the computation of second-
e front matter r 2004 Elsevier Ltd. All rights reserve
geo.2004.10.015
er at http://www.iamg.org/CGEditor/index.htm.
ing author. Tel.: +9140 234 34 600;
34651.
ess: [email protected] (V.P. Dimri).
S Fellow.
order derivatives that carry useful curvature information
of the objective function.
In this paper the 1D OCCAM’s algorithm has been
improved by inclusion of second-order derivative matrix
known as Hessian that is computed analytically. This
leads to a quadratic equation approximation of the
objective function. The modified algorithm has been
tested on synthetic and real field resistivity sounding
data. It is found that the modified algorithm is more
stable and convergent than OCCAM’s inversion.
The computation of second-order derivatives in
Schlumberger resistivity sounding involves cumbersome
piece of algebra and therefore these derivatives are
computed numerically using finite difference schemes.
This introduces many unacceptable errors and requires
more computational time, which results in inaccurate
curvature information that decides the step of descent
where as computation of the derivatives analytically
d.

ARTICLE IN PRESSN. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328320
solves the problem. The analytic approach based on
recursive formulation provides faster computation of the
derivatives.
2. Formulation of the problem
The nonlinear resistivity inversion relates observed
data and model parameters by equation
Y ¼ gðxÞ þ n; (1)
where Y ¼ ðy1; . . . ; yN ; Þ is a vector representing ob-
servations at different half-electrode separations in
Schlumberger sounding, N is number of half-electrode
separations, gðxÞ ¼ ðg1ðxÞ; . . . ; gN ðxÞÞ represents pre-
dicted data at different half-electrode separations, and
n is the measurement noise.
Various schemes to treat this non-linear problem are
described in detail by Dimri (1992). Terminology used
here closely follows Chernoguz (1995) with some
differences arising due to Constable et al. (1987).
Following Constable et al. (1987) the inverse problem
is posed as a constrained optimization problem, set forth
to minimize misfit X ¼ jjWY� WgðxÞjj; subject to the
constraint that roughness R ¼ jj@xjj is also minimized.
This can be converted to an unconstrained problem by
the use of Lagrange parameter m as follows:
U ¼1
2jj@xjj2 þ
1
2mfðW DYðxÞÞTðW DYðxÞ � w2�Þg; (2)
where @ is N N matrix defined by Constable et al.
(1987) as
@ ¼
0 0 ::: ::: 0
�1 1 ::: ::: 0
0 �1 1 ::: 0
: : : : :
: : : : :
0 0 ::: �1 1
0BBBBBBBB@
1CCCCCCCCA:
W is weighting matrix, w� is acceptable misfit value and,m is a Lagrange parameter used to optimize the
constrained functional ‘U’ (Smith, 1974) and DYðxÞ ¼
WY� WgðxÞ: If we expand the functional in Taylor’s
series at x ¼ xk (say) we get
Uðxk þ d; m;YÞ ¼ Uðxk; m;YÞ þ JTk dþ
1
2dTQkd;
where
Jk ¼ rxU ¼ @T@x �1
mðWGðxÞÞTW DYðxÞ
and
Qk ¼ r2xU ¼ @T@�1
mrxfðWGðxÞÞTW DYðxÞg:
Using the identity
rxfWGðxÞÞTW DYðxÞg ¼ ðWHðxÞÞTW DYðxÞ
� ðWGðxÞÞTWGðxÞ
the Qk becomes
Qk ¼ r2xU
¼ @T@�1
mfðWGðxÞÞTWGðxÞ
� ðWHðxÞÞTW DYðxÞg
where GðxÞ is Jacobian of gðxÞ and HðxÞ is Hessian of
gðxÞ:If we define
ðWHÞTW DY ¼
Xj
WHjW DYj as q;
where in Hj is Hessian of gðxÞ evaluated at jth data point
and DYj ¼ yj � gjðxÞ; q is the nonlinear part of the
Hessian, then minimization of the functional (2) using
Newton’s method for ith iteration step di yields
di ¼ � @T@þ m�1fWGðxÞTWGðxÞ � qg� �1
@T@x � m�1WGðxÞTW DYðxÞ�
x¼xi: ð3Þ
Thus xiþ1 ¼ xi þ di forms the iterative basis for the
optimization of functional (2). Eq. (3) gives generalized
OCCAM’s correction steps. By setting q as a null
matrix, the equation gives the model correction of the
popular OCCAM’s inversion algorithm. The OCCAM’s
optimization in Eq. (3) can be viewed as two sub-
algorithms, where primary optimizes the functional U
for different values of x and m and secondary optimizes
only misfit function. The difficulty may arise when the
primary suggests corrections in the direction of decreas-
ing U and secondary moves in search of decreasing
misfit without regarding the roughness. Thus due to lack
of curvature information in the OCCAM’s inversion,
secondary algorithm becomes blind in the direction of
true minimum of w2; when the requirement of the
primary algorithm to reduce U is overpowering.
Another problem in OCCAM’s inversion is the choice
of Lagrange’s parameter m. If we take mo1 for
minimization of functional used in standard OCCAM’s
inversion, the algorithm tends to be blind to minimize
misfit function in the absence of the curvature informa-
tion. Hence, there is need to incorporate curvature
information in terms of Hessian matrix. If we take mp1
in Eq. (3) the nonlinear part carrying curvature
information, will contribute to the convergence. In our
work we include the curvature information in the
OCCAM’s model correction steps. From Newton–-
Gauss method we have,
xiþ1 ¼ xi þ aidi; (4)

ARTICLE IN PRESSN. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328 321
where ai is the extra smoothing parameter which
uses curvature information as provided by Hessian
terms.
Following Chernoguz (1995) we have
ai ¼�j0ð0Þj00ð0Þ if 0oaip1;
1 otherwise;
((5)
where j0ð0Þ is the first-order derivative and j00ð0Þ is the
second-order derivative of Uðxi þ aidi; m;YÞ that are
computed as
j0ð0Þ ¼ dTi ½@@xi � m�1WGðxiÞTW DYðxiÞ�
and
j00ð0Þ ¼ � dTi ½@@xi � m�1fWGðxiÞTW DYðxiÞ
� WHðxiÞTW DYðxiÞdig�;
where the computation of Hessian matrix is involved in
each iteration.
Generally, derivatives are calculated using finite-
difference techniques. The two most commonly used
techniques are forward difference, which is accurate to
first order and central difference, which is accurate to
second order. In general, errors in forward difference
approximation become unacceptably large during the
last few iterations and often in such cases, central
difference scheme is used. Computation of partial
derivatives using central difference requires twice
evaluations of forward functional than forward
difference (Constable et al., 1987), and takes more
computational time. Hence it is not worthwhile to
use central difference for computation of Jacobian
and Hessian matrices. Errors associated with computa-
tion of Hessian terms have a substantial effect on
inversion algorithm. The use of analytical expre-
ssions instead of finite difference solves all the above
problems.
In OCCAM’s inversion Constable et al. (1987) have
computed Jacobian matrix for Schlumberger sounding
using analytical expressions and have concluded that the
Schlumberger resistivity inversion with finite-difference
derivatives takes 15 times more computational time than
the analytical derivatives. Hence in our algorithm, the
Hessian terms are calculated analytically.
For very large data sets computation of the Hessian in
each iteration becomes very tedious and time consum-
ing, hence we follow Chernoguz (1995) to minimize the
computations and at the same time to preserve the
curvature information using Hessian matrix in the extra
smoothing parameter a. In our algorithm Eq. (3) can be
used for first two iterations to get the two consecutive
values of a that are less than 1, and then the next
correction step can be deduced using a relation
ai ¼ 1� expð�tisÞ; (6)
where t and s are positive scalar constants (sX1) in ith
iteration, given as
t ¼ � ln ð1� a1Þ;
s ¼ log2½ln ð1� a2Þ= ln ð1� a1Þ�: ð7Þ
Eq. (5) is used to find the two consecutive values of a,i.e. a1 and a2 that are less than 1. In subsequent
iterations, Eq. (6) can be applied directly to find the
values of extra smoothing parameter to be used in
correction steps of Eq. (4). This avoids computation of
the tedious Hessian matrix in each iteration. In the
modified algorithm we choose initial model at random
as in the case of global optimization techniques. The
above-described inversion algorithm is coded in MA-
TLAB and can run on any machine. The weighting
matrix used in the code is taken as identity if uncertainty
in the data is not known. Step wise description of the
MATLAB code is given in Appendix A.
3. Analytical expressions of derivatives
The forward calculation for Schlumberger apparent
resistivity over a layered earth is given as
ra ¼AB
2
� �2 Z10
T1ðlÞJ1AB
2l
� �ldl; (8)
where J1 is the first-order Bessel’s function of the first
kind, AB/2 is the half-electrode spacing, l is electrode
parameter, T1 is the resistivity transform (Koefoed,
1976) that can be calculated recursively as
Ti�1 ¼Ti þ ri�1 tanhðlti�1Þ
1þ Ti tanhðlti�1Þ=ri�1
;
where ri and ti are the resistivity and thickness of ith
layer, respectively.
For the last layer TM ¼ rM ; where M is number of
layers.
Using fast Hankel transforms apparent resistivity can
be written as (Ghosh, 1971):
ra ¼X
K
T1ðlK Þf K ; (9)
where f K are the filter coefficients and K is the number
of coefficients.
3.1. First-order derivatives
The first-order derivatives of Eq. (9) are
qraqrj
¼X
K
qT1ðlK Þ
qrj
f K ; (10)
ARTICLE IN PRESS
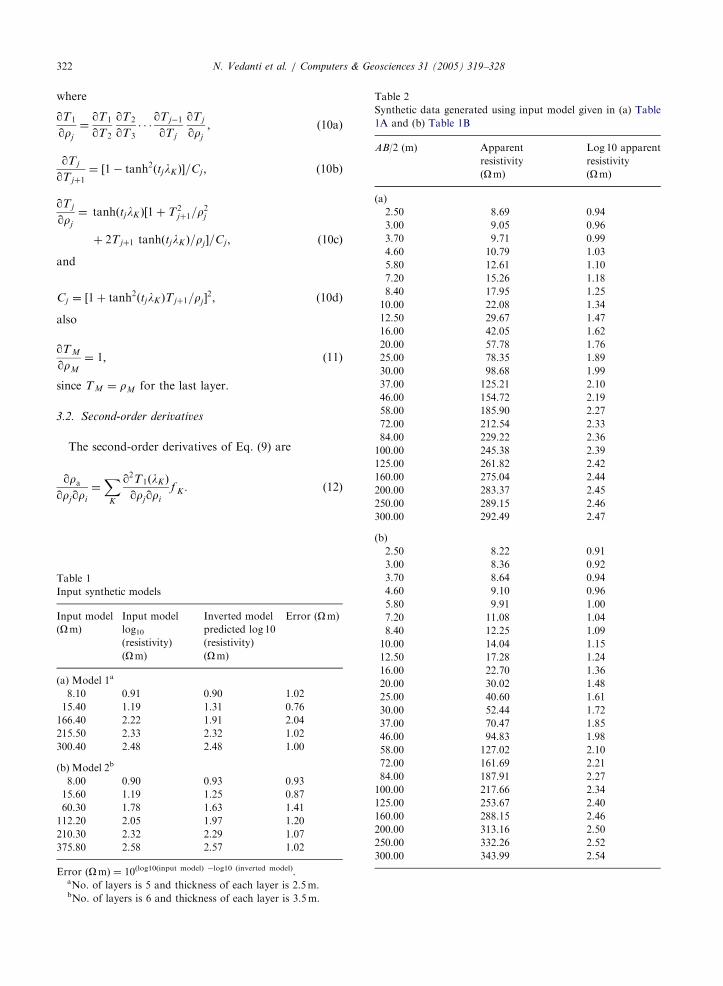
Table 2
Synthetic data generated using input model given in (a) Table
1A and (b) Table 1B
AB/2 (m) Apparent
resistivity
(Om)
Log 10 apparent
resistivity
(Om)
(a)
2.50 8.69 0.94
3.00 9.05 0.96
3.70 9.71 0.99
4.60 10.79 1.03
5.80 12.61 1.10
7.20 15.26 1.18
8.40 17.95 1.25
10.00 22.08 1.34
12.50 29.67 1.47
16.00 42.05 1.62
20.00 57.78 1.76
25.00 78.35 1.89
30.00 98.68 1.99
37.00 125.21 2.10
46.00 154.72 2.19
58.00 185.90 2.27
72.00 212.54 2.33
84.00 229.22 2.36
100.00 245.38 2.39
125.00 261.82 2.42
160.00 275.04 2.44
200.00 283.37 2.45
250.00 289.15 2.46
N. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328322
where
qT1
qrj
¼qT1
qT2
qT2
qT3� � �
qTj�1
qTj
qTj
qrj
; (10a)
qTj
qTjþ1¼ ½1� tanh2ðtjlK Þ�=Cj ; (10b)
qTj
qrj
¼ tanhðtjlK Þ½1þ T2jþ1=r
2j
þ 2Tjþ1 tanhðtjlK Þ=rj �=Cj ; ð10cÞ
and
Cj ¼ ½1þ tanh2ðtjlK ÞTjþ1=rj �2; (10d)
also
qTM
qrM
¼ 1; (11)
since TM ¼ rM for the last layer.
3.2. Second-order derivatives
The second-order derivatives of Eq. (9) are
qraqrjqri
¼X
K
q2T1ðlK Þ
qrjqri
f K : (12)
Table 1
Input synthetic models
Input model
(Om)
Input model
log10(resistivity)
(Om)
Inverted model
predicted log 10
(resistivity)
(Om)
Error (Om)
(a) Model 1a
8.10 0.91 0.90 1.02
15.40 1.19 1.31 0.76
166.40 2.22 1.91 2.04
215.50 2.33 2.32 1.02
300.40 2.48 2.48 1.00
(b) Model 2b
8.00 0.90 0.93 0.93
15.60 1.19 1.25 0.87
60.30 1.78 1.63 1.41
112.20 2.05 1.97 1.20
210.30 2.32 2.29 1.07
375.80 2.58 2.57 1.02
Error (Om) ¼ 10(log10(input model) �log10 (inverted model).aNo. of layers is 5 and thickness of each layer is 2.5m.bNo. of layers is 6 and thickness of each layer is 3.5m.
300.00 292.49 2.47
(b)
2.50 8.22 0.91
3.00 8.36 0.92
3.70 8.64 0.94
4.60 9.10 0.96
5.80 9.91 1.00
7.20 11.08 1.04
8.40 12.25 1.09
10.00 14.04 1.15
12.50 17.28 1.24
16.00 22.70 1.36
20.00 30.02 1.48
25.00 40.60 1.61
30.00 52.44 1.72
37.00 70.47 1.85
46.00 94.83 1.98
58.00 127.02 2.10
72.00 161.69 2.21
84.00 187.91 2.27
100.00 217.66 2.34
125.00 253.67 2.40
160.00 288.15 2.46
200.00 313.16 2.50
250.00 332.26 2.52
300.00 343.99 2.54
ARTICLE IN PRESS
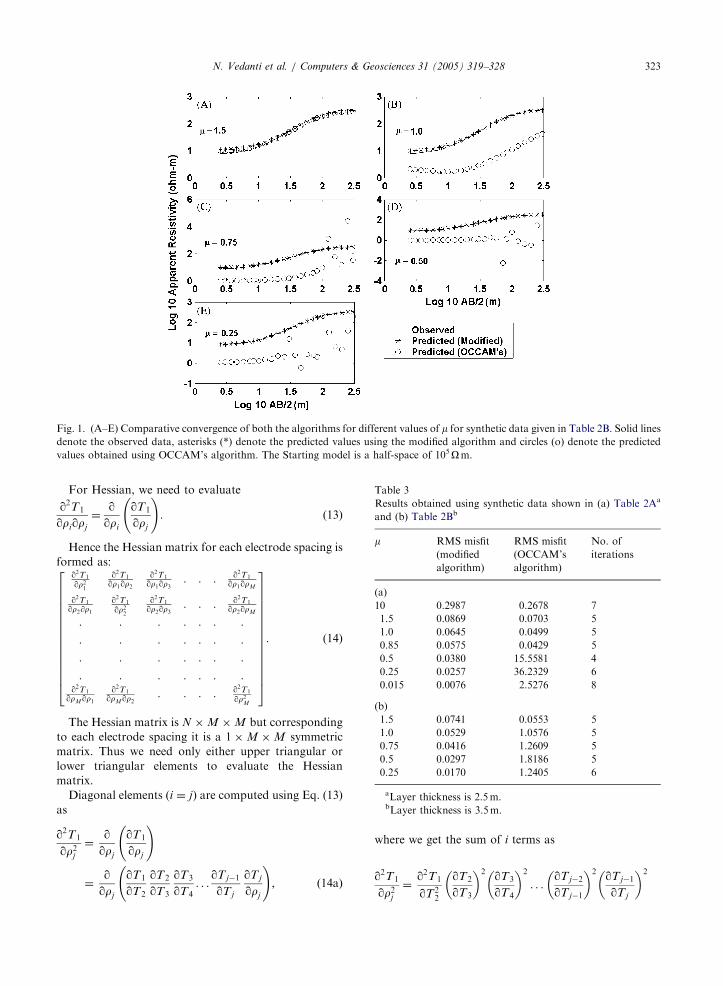
Fig. 1. (A–E) Comparative convergence of both the algorithms for different values of m for synthetic data given in Table 2B. Solid linesdenote the observed data, asterisks (*) denote the predicted values using the modified algorithm and circles (o) denote the predicted
values obtained using OCCAM’s algorithm. The Starting model is a half-space of 105Om.
Table 3
Results obtained using synthetic data shown in (a) Table 2Aa
and (b) Table 2Bb
m RMS misfit
(modified
algorithm)
RMS misfit
(OCCAM’s
algorithm)
No. of
iterations
(a)
10 0.2987 0.2678 7
1.5 0.0869 0.0703 5
1.0 0.0645 0.0499 5
0.85 0.0575 0.0429 5
0.5 0.0380 15.5581 4
0.25 0.0257 36.2329 6
0.015 0.0076 2.5276 8
(b)
1.5 0.0741 0.0553 5
1.0 0.0529 1.0576 5
0.75 0.0416 1.2609 5
0.5 0.0297 1.8186 5
0.25 0.0170 1.2405 6
aLayer thickness is 2.5m.bLayer thickness is 3.5m.
N. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328 323
For Hessian, we need to evaluate
q2T1
qriqrj
¼qqri
qT1
qrj
!: (13)
Hence the Hessian matrix for each electrode spacing is
formed as:q2T1
qr21
q2T1
qr1qr2q2T1
qr1qr3: : : q2T1
qr1qrM
q2T1
qr2@r1q2T1
qr22
q2T1
qr2qr3: : : q2T1
qr2qrM
: : : : : : :
: : : : : : :
: : : : : : :
: : : : : : :q2T1
qrMqr1q2T1
qrMqr2: : : : q2T1
qr2M
266666666666664
377777777777775: (14)
The Hessian matrix is N M M but corresponding
to each electrode spacing it is a 1 M M symmetric
matrix. Thus we need only either upper triangular or
lower triangular elements to evaluate the Hessian
matrix.
Diagonal elements (i ¼ j) are computed using Eq. (13)
as
q2T1
qr2j¼
qqrj
qT1
qrj
!
¼qqrj
qT1
qT2
qT2
qT3
qT3
qT4. . .
qTj�1
qTj
qTj
qrj
!; ð14aÞ
where we get the sum of i terms as
q2T1
qr2j¼
q2T1
qT22
qT2
qT3
� �2 qT3
qT4
� �2
. . .qTj�2
qTj�1
� �2 qTj�1
qTj
� �2
ARTICLE IN PRESS
1 2 3 4 5 60
3.5
3
2.5
2
1.5
1
0.5
= 1.5
1.0
0.75
0.50
0.25
=
=
=
=
50
100
150
200
250
(A)
RM
S m
isfit
RM
S m
isfit
No. of Iterations
µ
µ= 1.50
1.00
0.75
0.50
0.25
=
=
=
=
N. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328324
qTj
qrj
!2
þqT1
qT2
q2T2
qT23
!qT3
qT4
� �2
. . .qTj�2
qTj�1
� �2
qTj�1
qTj
� �2 qTj
qrj
!2
þ . . .þqT1
qT2
qT2
qT3. . .
q2Tk
qT2kþ1
qTkþ1
qTkþ2
� �2
. . .qTj�1
qTj
� �2
þ . . .þqT1
qT2
qT2
qT3
qT3
qT4. . .
qTj�2
qTj�1
qTj�1
qTj
q2Tj
qr2jð14bÞ
and nondiagonal elements are represented as
q2T1
qriqrj
¼q2T1
qT22
qT2
qT3
� �2 qT3
qT4
� �2
. . .qTi
qTj
qTi
qri
qTj
qrj
þqT1
qT2
q2T2
qT23
!qT3
qT4
� �2 qT4
qT5. . .
qTi
qri
qTj
qrj
þqT1
qT2
qT2
qT3
q2T3
qT24
. . .qTi
qTj
qTi
qri
qTj
qrj
þ . . .
þqT1
qT2
qT2
qT3
qT3
qT4. . .
qTi�1
qTi
qTj
qrj
qqri
qTi
qTj
� �;
ð14cÞ
where in
qqrj
qTj
qTjþ1
� �¼
qqTjþ1
qTj
qrj
!(14d)
¼ 2 tanhðtjlK ÞTjþ1½1
þ Tjþ1 tanhðtjlK Þ=rj �qTj
qTjþ1
� ��r2j Cj ð14eÞ
q2Tj
qr2j¼ � 2 tanhðtjlkÞf1� tanh2ðtjlkÞgT
2jþ1=frj
þ tanhðtjlkÞTjþ1g3; ð14fÞ
q2Tj
qT2jþ1
¼ � 2r2j tanhðtjlK Þ½1
� tanh2ðtjlkÞ�=frj þ tan hðtjlkÞTjþ1g; ð14gÞ
Cj is the same as in Jacobian computations. It is
advantageous to compute all the terms of the Hessian
and the adjoining products simultaneously to save
computational time and memory.
1 2 3 4 5 60
(B) No. of Iterations
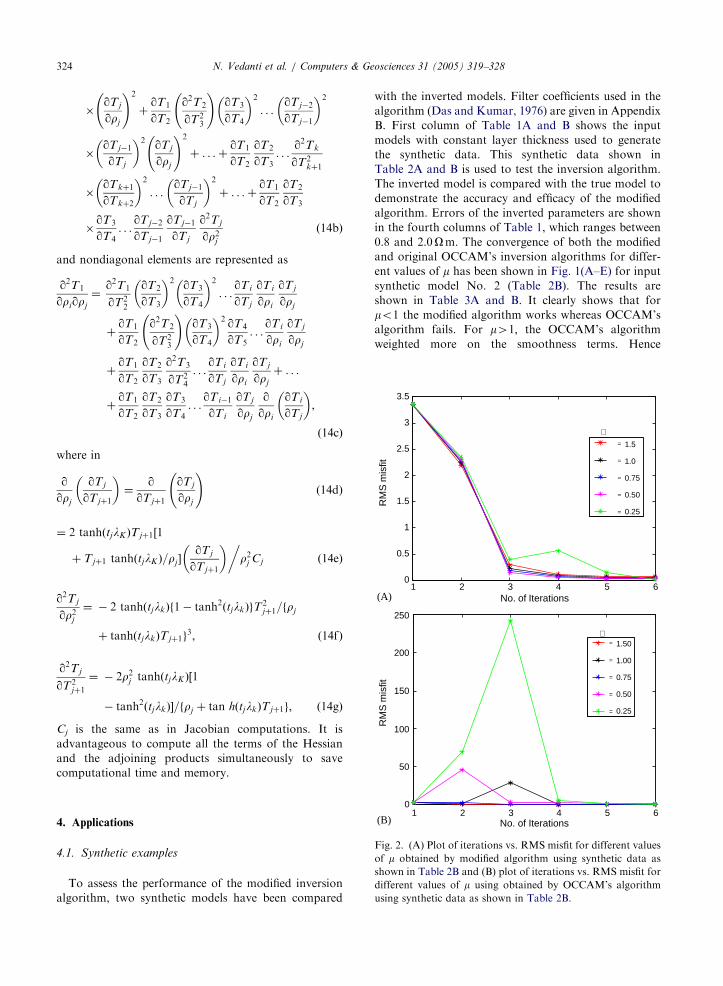
Fig. 2. (A) Plot of iterations vs. RMS misfit for different values
of m obtained by modified algorithm using synthetic data as
shown in Table 2B and (B) plot of iterations vs. RMS misfit for
different values of m using obtained by OCCAM’s algorithm
using synthetic data as shown in Table 2B.
4. Applications
4.1. Synthetic examples
To assess the performance of the modified inversion
algorithm, two synthetic models have been compared
with the inverted models. Filter coefficients used in the
algorithm (Das and Kumar, 1976) are given in Appendix
B. First column of Table 1A and B shows the input
models with constant layer thickness used to generate
the synthetic data. This synthetic data shown in
Table 2A and B is used to test the inversion algorithm.
The inverted model is compared with the true model to
demonstrate the accuracy and efficacy of the modified
algorithm. Errors of the inverted parameters are shown
in the fourth columns of Table 1, which ranges between
0.8 and 2.0Om. The convergence of both the modified
and original OCCAM’s inversion algorithms for differ-
ent values of m has been shown in Fig. 1(A–E) for input
synthetic model No. 2 (Table 2B). The results are
shown in Table 3A and B. It clearly shows that for
mo1 the modified algorithm works whereas OCCAM’s
algorithm fails. For m41; the OCCAM’s algorithm
weighted more on the smoothness terms. Hence

ARTICLE IN PRESS
2
2.5
= 1.00
µ
N. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328 325
the modified algorithm can be seen as generalized
OCCAM’s inversion.
It is worth pointing here that smaller values of mshould be preferred to give less weight to the smooth-
ness/roughness part as described in Eq. (2). The bias
of algorithm to generate smooth models should be
avoided whenever it is not required. Variation of
RMS misfit with iteration number has been shown in
Fig. 2 for different values of m: The modified algorithm
shows stable convergence, while erratic variation in
RMS misfit of OCCAM’s algorithm has been observed
for mo1: We observed a remarkable difference in
convergence between modified inversion algorithm
and existing OCCAM’s algorithm for mo1: Results
obtained using two different filters is shown in
Appendix C.
RM
S m
isfit
1 2 3 4 5 60
0.5
1
1.5
= 0.10 = 0.05 = 0.0125 = 0.005
No. of Iterations
Fig. 4. Plot of iterations vs. RMS misfit for different values of musing field data of SGT.
4.2. Field example
The developed algorithm is used to invert 1D
Schlumberger resistivity sounding data. The data from
Southern Granulitic Terrain (SGT) of India
(1113405400N, 781301800E) over a 10 km long profile is
given in Appendix D. This data has been collected
by Deep Resistivity Sounding (DRS) Group of
NGRI, Hyderabad, India using the Scintrex make Deep
Resistivity Equipment, TSQ4-10 KVA. The convergence
of the modified algorithm has been shown in
Fig. 3(A–F). We have assumed starting model as a
Iteration No. 1 Iteratio
Iteration No. 4 Iteratio
8
6
4
3
2
2
5
4
3
2
10
02
0 2 4 0
0 2 4
4
(A) (B)
(D) (E)
ObservedPredicted
3.5
2.5
1.5
3
2
4
3.5
2.5
1.5
log 10(AB/2) [m] log 10(ALog1
0 [A
ppar
ent R
esis
tivity
] [oh
m-m
]Lo
g10
[App
aren
t Res
istiv
ity] [
ohm
-m]
Fig. 3. (A–F) Convergence of modified algorithm for m ¼ 0:0125 usinobserved data, asterisks (*) denote predicted values using modified al
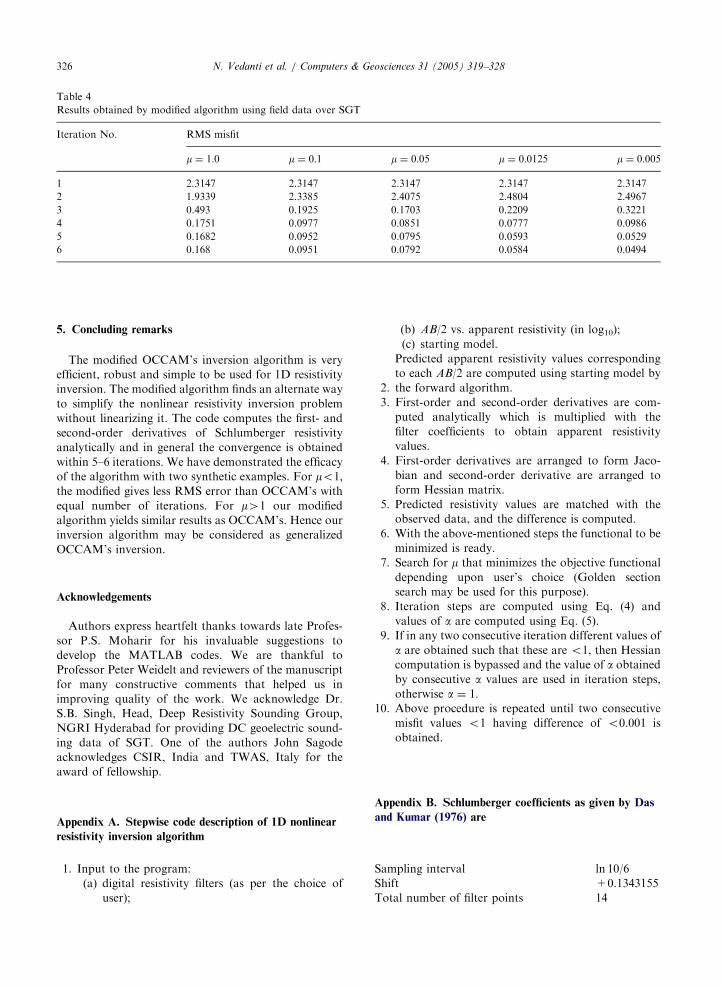
half-space of 105Om, which was far from the observed
one. The modified algorithm searches for the lowest
misfit until it becomes constant with further iterations as
shown in Fig. 4. This is the global optimization strategy
of our inversion scheme, where the existing OCCAM’s
inversion fails for mo1: Results obtained using the
modified algorithm for different values of m, are shownin Table 4.
n No. 2
n No. 5 Iteration No. 6
Iteration No. 3
4
3
2
4 0 2 4
2 4 0 2 4
(C)
(F)
4.5
3.5
2.5
1.5
1.5
3
2
4
3.5
2.5
B/2) [m] log 10(AB/2) [m]
g field data of SGT as given in Appendix D. Solid lines denote
gorithm. The starting model is a half-space of 105Om.
ARTICLE IN PRESS
Table 4
Results obtained by modified algorithm using field data over SGT
Iteration No. RMS misfit
m ¼ 1:0 m ¼ 0:1 m ¼ 0:05 m ¼ 0:0125 m ¼ 0:005
1 2.3147 2.3147 2.3147 2.3147 2.3147
2 1.9339 2.3385 2.4075 2.4804 2.4967
3 0.493 0.1925 0.1703 0.2209 0.3221
4 0.1751 0.0977 0.0851 0.0777 0.0986
5 0.1682 0.0952 0.0795 0.0593 0.0529
6 0.168 0.0951 0.0792 0.0584 0.0494
N. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328326
5. Concluding remarks
The modified OCCAM’s inversion algorithm is very
efficient, robust and simple to be used for 1D resistivity
inversion. The modified algorithm finds an alternate way
to simplify the nonlinear resistivity inversion problem
without linearizing it. The code computes the first- and
second-order derivatives of Schlumberger resistivity
analytically and in general the convergence is obtained
within 5–6 iterations. We have demonstrated the efficacy
of the algorithm with two synthetic examples. For mo1;the modified gives less RMS error than OCCAM’s with
equal number of iterations. For m41 our modified
algorithm yields similar results as OCCAM’s. Hence our
inversion algorithm may be considered as generalized
OCCAM’s inversion.
Acknowledgements
Authors express heartfelt thanks towards late Profes-
sor P.S. Moharir for his invaluable suggestions to
develop the MATLAB codes. We are thankful to
Professor Peter Weidelt and reviewers of the manuscript
for many constructive comments that helped us in
improving quality of the work. We acknowledge Dr.
S.B. Singh, Head, Deep Resistivity Sounding Group,
NGRI Hyderabad for providing DC geoelectric sound-
ing data of SGT. One of the authors John Sagode
acknowledges CSIR, India and TWAS, Italy for the
award of fellowship.
Appendix A. Stepwise code description of 1D nonlinear
resistivity inversion algorithm
1.
Input to the program:(a) digital resistivity filters (as per the choice of
user);
(b) AB/2 vs. apparent resistivity (in log10);
(c) starting model.
2.
Predicted apparent resistivity values corresponding
to each AB/2 are computed using starting model by
the forward algorithm.
3.
First-order and second-order derivatives are com-puted analytically which is multiplied with the
filter coefficients to obtain apparent resistivity
values.
4.
First-order derivatives are arranged to form Jaco-bian and second-order derivative are arranged to
form Hessian matrix.
5.
Predicted resistivity values are matched with theobserved data, and the difference is computed.
6.
With the above-mentioned steps the functional to beminimized is ready.
7.
Search for m that minimizes the objective functionaldepending upon user’s choice (Golden section
search may be used for this purpose).
8.
Iteration steps are computed using Eq. (4) andvalues of a are computed using Eq. (5).
9.
If in any two consecutive iteration different values ofa are obtained such that these are o1, then Hessian
computation is bypassed and the value of a obtainedby consecutive a values are used in iteration steps,
otherwise a ¼ 1:
10. Above procedure is repeated until two consecutivemisfit values o1 having difference of o0.001 is
obtained.
Appendix B. Schlumberger coefficients as given by Das
and Kumar (1976) are
Sampling interval
ln 10/6Shift
+0.1343155Total number of filter points
14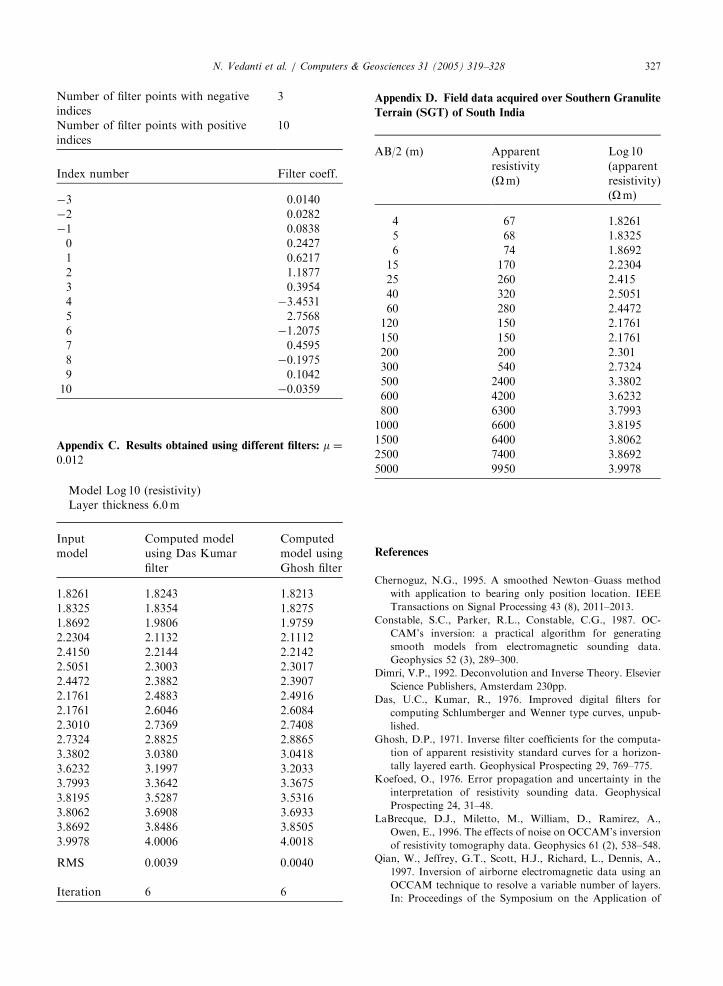
ARTICLE IN PRESSN. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328 327
Number of filter points with negative
indices
3
Number of filter points with positive
indices
10
Index number
Filter coeff.�3
0.0140�2
0.0282�1
0.08380
0.24271
0.62172
1.18773
0.39544
�3.45315
2.75686
�1.20757
0.45958
�0.19759
0.104210
�0.0359Appendix C. Results obtained using different filters: m ¼
0:012
Model Log 10 (resistivity)
Layer thickness 6.0m
Input
model
Computed model
using Das Kumar
filter
Computed
model using
Ghosh filter
1.8261
1.8243 1.82131.8325
1.8354 1.82751.8692
1.9806 1.97592.2304
2.1132 2.11122.4150
2.2144 2.21422.5051
2.3003 2.30172.4472
2.3882 2.39072.1761
2.4883 2.49162.1761
2.6046 2.60842.3010
2.7369 2.74082.7324
2.8825 2.88653.3802
3.0380 3.04183.6232
3.1997 3.20333.7993
3.3642 3.36753.8195
3.5287 3.53163.8062
3.6908 3.69333.8692
3.8486 3.85053.9978
4.0006 4.0018RMS
0.0039 0.0040Iteration
6 6Appendix D. Field data acquired over Southern Granulite
Terrain (SGT) of South India
AB/2 (m)
Apparentresistivity
(Om)
Log 10
(apparent
resistivity)
(Om)
4
67 1.82615
68 1.83256
74 1.869215
170 2.230425
260 2.41540
320 2.505160
280 2.4472120
150 2.1761150
150 2.1761200
200 2.301300
540 2.7324500
2400 3.3802600
4200 3.6232800
6300 3.79931000
6600 3.81951500
6400 3.80622500
7400 3.86925000
9950 3.9978References
Chernoguz, N.G., 1995. A smoothed Newton–Guass method
with application to bearing only position location. IEEE
Transactions on Signal Processing 43 (8), 2011–2013.
Constable, S.C., Parker, R.L., Constable, C.G., 1987. OC-
CAM’s inversion: a practical algorithm for generating
smooth models from electromagnetic sounding data.
Geophysics 52 (3), 289–300.
Dimri, V.P., 1992. Deconvolution and Inverse Theory. Elsevier
Science Publishers, Amsterdam 230pp.
Das, U.C., Kumar, R., 1976. Improved digital filters for
computing Schlumberger and Wenner type curves, unpub-
lished.
Ghosh, D.P., 1971. Inverse filter coefficients for the computa-
tion of apparent resistivity standard curves for a horizon-
tally layered earth. Geophysical Prospecting 29, 769–775.
Koefoed, O., 1976. Error propagation and uncertainty in the
interpretation of resistivity sounding data. Geophysical
Prospecting 24, 31–48.
LaBrecque, D.J., Miletto, M., William, D., Ramirez, A.,
Owen, E., 1996. The effects of noise on OCCAM’s inversion
of resistivity tomography data. Geophysics 61 (2), 538–548.
Qian, W., Jeffrey, G.T., Scott, H.J., Richard, L., Dennis, A.,
1997. Inversion of airborne electromagnetic data using an
OCCAM technique to resolve a variable number of layers.
In: Proceedings of the Symposium on the Application of

ARTICLE IN PRESSN. Vedanti et al. / Computers & Geosciences 31 (2005) 319–328328
Geophysics to Environmental and Engineering Problems
(SAGEEP), pp. 735–739.
Siripunvaraporn, W., Egbert, G.D., 1996. An efficient data
space OCCAM’s inversion for MT and MV data. EOS,
Transactions, American Geophysical Union 77(46) (Suppl.)
p. 156.
Smith, D.R., 1974. Variational Methods in Optimization.
Prentice-Hall, Inc., Englewood, NJ.
Related Documents











