STUDIO DI FATTIBILITÀ SULLA REALIZZAZIONE DI UN SISTEMA DI PROPULSIONE IBRIDO ALMA MATER STUDIORUM – UNIVERSITÀ DI BOLOGNA FACOLTÀ DI INGEGNERIA corso di laurea in INGEGNERIA MECCANICA Laboratorio di CAD Candidato: Luca Rizzi Relatore: Prof. Ing. Luca Piancastelli

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
STUDIO DI FATTIBILITÀ SULLA
REALIZZAZIONE DI UN SISTEMA DI
PROPULSIONE IBRIDO
ALMA MATER STUDIORUM – UNIVERSITÀ DI BOLOGNA
FACOLTÀ DI INGEGNERIA
corso di laurea in
INGEGNERIA MECCANICA
Laboratorio di CAD
Candidato:
Luca Rizzi
Relatore:
Prof. Ing. Luca Piancastelli

Consumi mondiali di petrolio
AUMENTANO : • COSTO PETROLIO
• COSTO BENZINA, GASOLIO …
• INQUINAMENTO

NECESSARIE SOLUZIONI INNOVATIVE
PRESENTE
• Combustibili alternativi :
Metano, Gpl
• Aumento efficienza MCI :
Common rail, multijet, multiair
• Downsizing
FUTURO
• Celle a combustibile - idrogeno
Presenti ancora difficoltà
tecniche e costi molto
elevati

FUTURO PROSSIMO PROPULSIONE IBRIDA
MOTORE A
COMBUSTIONE INTERNAMOTORE ELETTRICO+
Vantaggi : Svantaggi :
• MCI funzionante a punto fisso
• Recupero energia in frenata
• Funzionamento in modalità
solo elettrica (emissioni zero)
• Meccanismo idle-off
• Maggiori costi d’acquisto
• Sofisticata gestione del sistema
• Eventuale aumento peso e
ingombro
• Autonomia solo elettrica limitata

IL PROGETTO
• Abbinare al motore turbodiesel Fiat 1.9 Jtd un motore elettrico brushless
• Il motore elettrico sostituisce il motorino di avviamento dal punto di vista
fisico e funzionale
• Scelta delle batterie per l’alimentazione del motore elettrico
• Stima dell’autonomia in modalità solo elettrica
• Utilizzo di supercapacitori per il recupero dell’energia in frenata
• Ideazione di tre possibili configurazioni dell’autovettura

OBIETTIVI
• Soluzione economica per la realizzazione di una configurazione ibrida
• Ottenere una autonomia soddisfacente in modalità solo elettrica e quindi
ridurre consumi di carburante ed emissioni nocive dell’autovettura
• Salvaguardare la vita delle batterie tramite l’utilizzo di supercapacitori
per gli spunti di potenza
• Rendere compatibili i nuovi componenti con ingombri e pesi di una
normale autovettura

MOTORE ELETTRICO
La scelta ricade sui motori brushless (senza contatti striscianti):
• Alta efficienza
• Possibilità di funzionare sia da
motore che da generatore
• Scarsa produzione di calore
• Alto rapporto potenza/dimensioni
Scelto il top di gamma della Hacker motors : Hacker A-200
Potenza max 15000 W
Tensione
alimentazione42 V
Peso 2590 g
Diametro 109 mm

BATTERIE
Le batterie più prestazionali sono gli accumulatori Li-Po (litio-polimero):
Vantaggi :
• Sono l’evoluzione delle batterie agli ioni di litio (Li-ion)
• Polimero non infiammabile Maggiore sicurezza
• Densità energetica 20% maggiore delle Li-ion e 3 volte le Ni-Mh
• Non hanno effetto memoria
• Elevate correnti di scarica
Svantaggi :
• Costi elevati
• Non possono essere completamente scaricate per evitare danneggiamenti

SCELTA BATTERIE
Il motore Hacker può essere alimentato con 12 celle Li-Po (12 S)
Tensione singola cella = 3,7 V Tensione totale = 44,4 V
Vengono prodotte batterie con un certo numero di celle (2S, 3S, 4S, 6S…)
Si può scegliere la configurazione più adatta per raggiungere le 12 celle necessarie
Per ridurre al minimo i cablaggi si sceglie la configurazione con due batterie da 6S
Scelta modello in base a:
• Capacità batteria
• Rapporto capacità/peso
Scelta batteria
Hyperion G3 VX – 35-65 C
Capacità Dimensioni Peso
Corrente di
scarica
Nom Max
6500 mAh 160x47x70,8 mm 1011 g 228 A 423 A

STIMA DEL CONSUMO ELETTRICO
Utilizzo di un modello matematico per determinare la forza resistente (FR)
FR = P ∙ ( r0 + i ) + ( k ∙ P + b ) ∙ v2
• P = peso
• r0 = resistenza al rotolamento degli pneumatici
• i = tangente alla pendenza ( consideriamo i = 0)
• k = coefficiente di aumento resistenza rotolamento pneumatici
• b = coefficiente di resistenza aerodinamica
• v = velocità
Moto a velocità costante
Moto uniformemente accelerato
Forza motrice = Forza resistente
FM = ( m ∙ a ) + FR
FM ∙ v = Potenza motrice Energia = Potenza ∙ ∆t
Script elaborati con il programma di calcolo Matlab 7

STIMA DEL CONSUMO ELETTRICO
Dati su accelerazioni, velocità e distanze teoriche percorse ricavati
dalla normativa europea
CICLO URBANO CICLO EXTRAURBANO

STIMA DEL CONSUMO ELETTRICO
Si ottengono così i consumi energetici in Watt-ora (Wh)
Dividendo il consumo energetico per la tensione di alimentazione del
motore elettrico ( 42 V ) si ottiene il consumo in Ampere-ora (Ah)
CicloTotale consumo
(Ah)
Distanza
percorsa (km)
Consumo per
chilometro
(Ah/km)
Urbano 10,040 4,068 2,468
Extraurbano 11,514 6,956 1,655
Distanza percorsa Consumo per chilometro
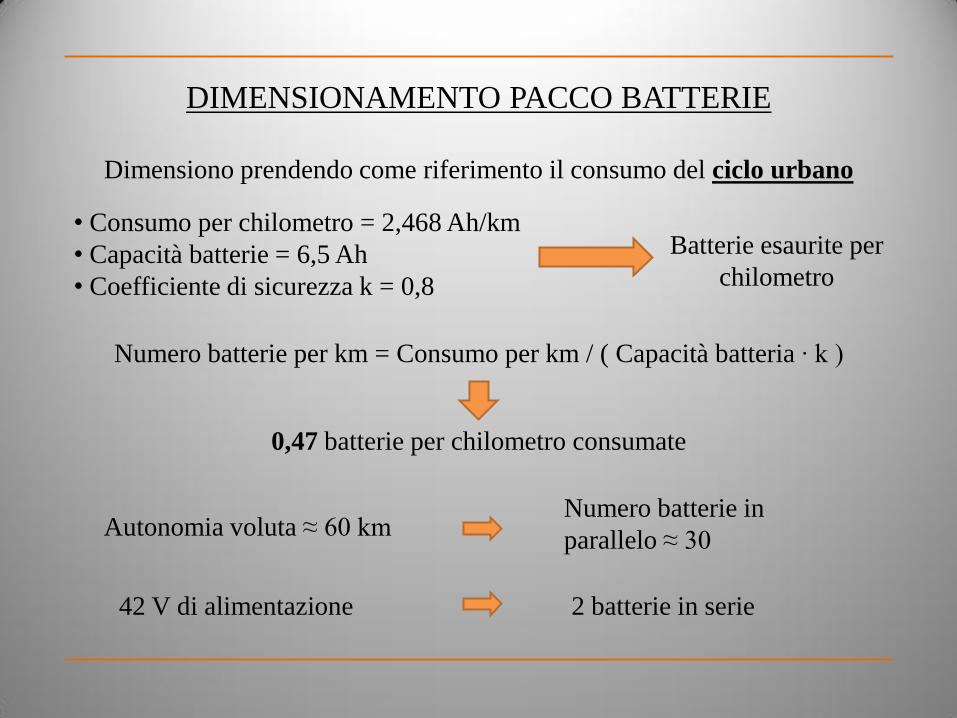
DIMENSIONAMENTO PACCO BATTERIE
• Consumo per chilometro = 2,468 Ah/km
• Capacità batterie = 6,5 Ah
• Coefficiente di sicurezza k = 0,8
Batterie esaurite per
chilometro
Numero batterie per km = Consumo per km / ( Capacità batteria ∙ k )
0,47 batterie per chilometro consumate
Dimensiono prendendo come riferimento il consumo del ciclo urbano
Autonomia voluta ≈ 60 km Numero batterie in
parallelo ≈ 30
42 V di alimentazione 2 batterie in serie

POSIZIONAMENTO PACCO BATTERIE
DEFINITIVO
Per motivi di sicurezza si è scelto di posizionare le batterie dietro al divano
posteriore, luogo protetto in caso di incidente.
Necessito di una configurazione delle batterie che tolga poco spazio al vano
bagagli
Dimensioni batteria: 160x47x70,8 mm
• 2 batterie per il lato da 47 mm
• 16 batterie per il lato da 70,8 mm
• 2 batterie per il lato da 160 mm
• Spessore ≈ 10 cm
• Larghezza ≈ 115 cm
• Altezza ≈ 33 cm
TOTALE 64 BATTERIE

POSIZIONAMENTO PACCO BATTERIE
DEFINITIVO
32 batterie in parallelo
2 file in serie
32 / 0,47 = 68 km di
autonomia in modalità
solo elettrica
Peso pacco batterie
64 batterie ∙ 1,011 kg = 65 kgRISULTATI OTTIMI

SUPERCAPACITORI
Sono condensatori elettrochimici a doppio strato
Immagazzinano energia elettrica polarizzando una soluzione elettrolitica
Elettrodi porosi : superfici di 2000 m2 per grammo
• Funzionamento efficiente e
reversibile
• Range di utilizzo tra -40°C e +65°C
• Capacità rimane sostanzialmente
costante ad ogni temperatura

SUPERCAPACITORI
Perché utilizzarli a fianco delle batterie:
• Efficienza di carica/scarica molto elevata
• Complementari alle batterie in quanto
sono ottimi per fornire picchi di potenza
per brevi periodi di tempo
• Efficiente recupero dell’energia cinetica
in frenata
• Risparmiano stress alle batterie
prolungandone la durata e riducendone il
numero complessivo
• Cicli di vita (carica/scarica) elevati
• Buon funzionamento anche a
temperature estreme

SUPERCAPACITORI
Fonte primaria :
• MCI
• Batterie
• Fuel-cell
Modello di applicazione
Richieste
medie di
potenza
Supercapacitori• Picchi di potenza
• Recupero energia

DIMENSIONAMENTO SUPERCAPACITORI
Dimensionamento per recuperare l’energia cinetica di una frenata da 50 km/h
Decelerazione media = 9 m/s2 Tempo frenata = 1,5 s
Potenza motore elettrico = 15000 W
Rendimento da generatore ( η ) = 0,8
Energia ( E ) = Potenza ∙ tFRENATA ∙ η = 18000 J
Scelta tra i supercapacitori della Maxwell Technologies
Numero celle in serie = V max / voltaggio cella = 17
Maxwell serie BCAP Voltaggio nominale cella = 2,7 V
Voltaggio max sistema = 44,4 V

DIMENSIONAMENTO SUPERCAPACITORI
Voltaggio nominale Hacker (VN) = 42 V
Corrente funzionamento ( I ) = E / ( tFRENATA ∙ VN ) = 285,7 A
Tempo rilascio energia ( tR ) = 2,5
Costante di tempo supercapacitore ( RC ) = 0,7
∆V = 5 V ( valore di primo tentativo )
Capacità sistema (CSIST) = I ∙ ( tR ∙ RC ) / ∆V ≈ 182 F
CSIST = Capacità cella ∙ # celle parallelo / # celle serie
# celle parallelo = 1
# celle serie = 17
Capacità cella = CSIST ∙ # celle serie ≈ 3100 F

DIMENSIONAMENTO SUPERCAPACITORI
Il supercapacitore con la capacità più
elevata è il BCAP3000 P270 con una
capacità di 3000 F
Rieseguendo i calcoli si ottiene:
Capacità sistema = 176,5 F
∆V = 5,2 VVALORI ACCETTABILI
Pacco da 17 supercapacitori da
abbinare a ciascun motore elettrico
installato
Peso ≈ 9 kg
Dimensioni ≈ 37x19x14 cm

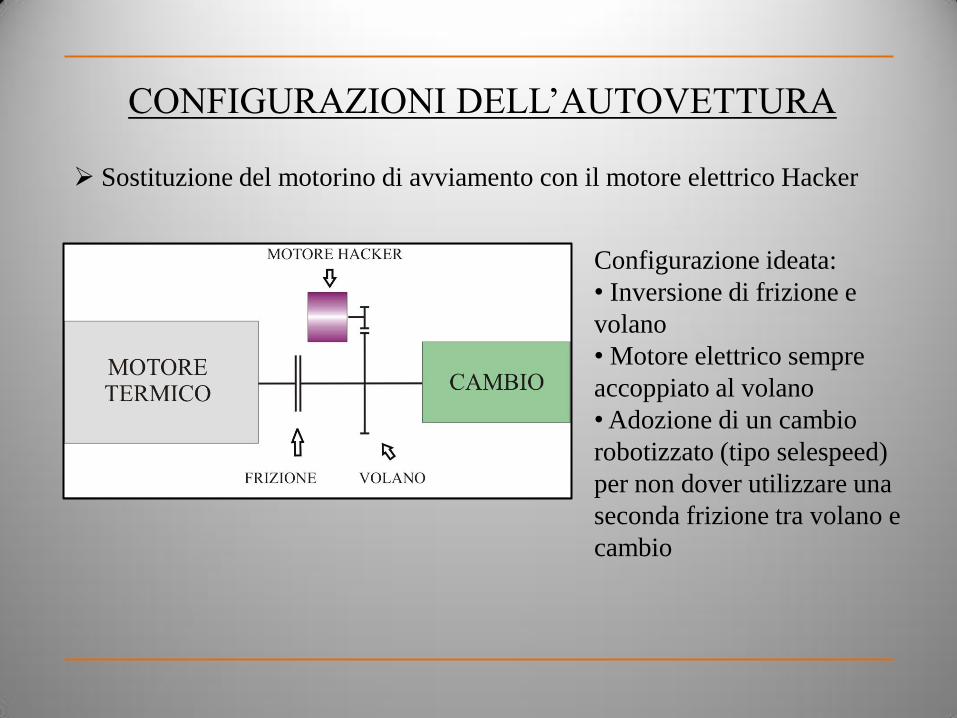
CONFIGURAZIONI DELL’AUTOVETTURA
Sostituzione del motorino di avviamento con il motore elettrico Hacker
Configurazione classica:
• Motorino avviamento
accoppiato al volano della
frizione
• Frizione tra volano e
cambio
• Disinnesto pignone
motorino una avviato il MCI
CONFIGURAZIONI DELL’AUTOVETTURA
Sostituzione del motorino di avviamento con il motore elettrico Hacker
Configurazione ideata:
• Inversione di frizione e
volano
• Motore elettrico sempre
accoppiato al volano
• Adozione di un cambio
robotizzato (tipo selespeed)
per non dover utilizzare una
seconda frizione tra volano e
cambio

CONFIGURAZIONI DELL’AUTOVETTURA
Condizioni di funzionamento
Avviamento : • Frizione innestata
• Cambio in folle
Propulsione solo elettrica : • Frizione disinnestata
• Ruote trasmettono il moto dal motore elettrico
• Cambi di marcia garantiti dal cambio robotizzato
Propulsione con MCI : • Frizione innestata
• Ruote trasmettono il moto dal MCI
• Motore elettrico funziona da generatore
trascinato dal MCI

CONFIGURAZIONI DELL’AUTOVETTURA
Stima rapporto riduzione per l’avviamento
Motorino avviamento : 3 kW a 300 giri al minuto del volano
Motore Hacker : caratteristica di potenza lineare 3 kW a 1590 rpm
Rapporto riduzione ( i ) = 1590 / 300 = 5,3
Applicando una condizione di non interferenza
ottengo il numero minimo di denti del pignonez1’ = 15,8
Per ottenere valori interi che abbiano i = 5,3 scelgoz1 = 20
z2 = 106
Adottando un modulo di 2,5 mm
ottengo i diametri primitivi
d1 = 50 mm
d2 = 265 mm
VALORI
ACCETTABILI

PRIMA CONFIGURAZIONE
1 Motore Hacker accoppiato al volano
1 Pacco supercapacitori posto nel vano motore
1 Controller ed inverter

PRIMA CONFIGURAZIONE
Motore Fiat 1.9 JTD
Accoppiamento Hacker - volano frizione

SECONDA CONFIGURAZIONE
2 Motori Hacker accoppiati al volano
2 Pacchi di supercapacitori posti nel vano motore
2 Controller ed inverter
Il pacco batterie complessivo è il medesimo

SECONDA CONFIGURAZIONE
I due motori elettrici possono
essere entrambe installati sul
volano della frizione
Ognuno sarà alimentato in
modo autonomo dall’altro,
ma il pacco batterie rimane
invariato

TERZA CONFIGURAZIONE
2 Motori Hacker : uno accoppiato al volano, l’altro agente
sull’asse posteriore
2 Pacchi di supercapacitori : uno posizionato nel vano motore,
l’altro nel vano della ruota di scorta o contiguo alle batterie

TERZA CONFIGURAZIONE
Ulteriore gruppo cambio-
differenziale per ottenere
una configurazione a 4 ruote
motrici
I motori elettrici sono
sempre alimentati in modo
autonomo

PRESTAZIONI
Calcolo dell’accelerazione 0 – 50 km/h
Utilizzo del modello di resistenza aerodinamica presentato in precedenza
Velocità (km/h)
tempo
(s)
PRIMA
CONFIGURAZIONE
POTENZA 15 kW
0 – 50 km/h in 14,4 s
SECONDA e TERZA
CONFIGURAZIONE
POTENZA 30 kW
0 – 50 km/h in 6,5 s

CONCLUSIONI
• La realizzazione del sistema di propulsione ideata partendo da una base
già esistente è fattibile e potrebbe essere una soluzione economica
• Il sistema ibrido realizzato diesel - elettrico è innovativo e realizzabile
senza troppo modifiche e permette di risparmiare l’installazione di alcuni
componenti come l’alternatore
• Per la produzione in serie dovrebbe comunque essere realizzato un
motore elettrico ad hoc che possa arrivare a 20000 rpm : il motore Hacker
presenterebbe problemi di sovravelocità se trascinato dal MCI a causa del
rapporto di riduzione tra motore elettrico e albero motore
• Si è raggiunto un buon valore di 60 km di autonomia del veicolo in
modalità solo elettrica
• Pesi dei componenti aggiunti contenuti : 80 – 90 kg
• Buone prestazioni soprattutto per la versione da 30 kW

GRAZIE PER L’ATTENZIONE
Related Documents











