Algoritmo Basado en Modelos Sustitutos para Registro R´ ıgido de Im´ agenes Ulises Tirado, Mariano Rivera, Ramon Aranda Departamento de Ciencias de la Computaci´ on Centro de Investigaci´ on en Matem´ aticas, A.C. Guanajuato, Gto, M´ exico, CP 36240 e-mail: {ulises.tirado, mrivera, arac }@cimat.mx Resumen El registro de im´ agenes es muy importante para encontrar la relaci´ on es- pacial entre dos o mas im´ agenes para luego usar esa relaci´ on en diversas aplicaciones. En esta tarea una imagen I M (x) (llamada imagen movida) es deformada para ajustarse a otra imagen I F (x) (llamada imagen fija). En otras palabras, el registro es un problema de encontrar una transforma- ci´ on de coordenadas T (x) que hace que I M (T (x)) se alinee espacialmente con I F (x). Los par´ ametros de T (x) pueden ser estimados mediante la min- imizaci´ on de una funci´ on de costo. En este trabajo abordaremos el caso del registro r´ ıgido, el cual la transformaci´ on T solo consiste de rotaciones y traslaciones. Proponemos una estrategia para la estimaci´ on de las variables en donde la matriz de rotaci´ on la podemos aproximar por medio de mode- los sustitutos, reduciendo as´ ı la complejidad y el tiempo de procesamiento. Mostramos que nuestro algoritmo minimiza la funci´ on de costo en cada iteraci´ on y garantizamos convergencia. Nuestra propuesta es evaluadoa me- diante en experimentos en im´ agenes 2D. Palabras Clave. Registro r´ ıgido, modelo sustituto, im´ agenes, optimizaci´ on. Algorithm based on Surrogate Models for Rigid Image Registration Abstract The image registration is important to find the spatial relationship between two or more images, then this information can be used in several applica- tions. Therefore, an image I M (x) (moved image) is deformed for adjusting to 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Algoritmo Basado en Modelos Sustitutos
para Registro Rıgido de Imagenes
Ulises Tirado, Mariano Rivera, Ramon ArandaDepartamento de Ciencias de la ComputacionCentro de Investigacion en Matematicas, A.C.
Guanajuato, Gto, Mexico, CP 36240e-mail: ulises.tirado, mrivera, arac @cimat.mx
Resumen
El registro de imagenes es muy importante para encontrar la relacion es-pacial entre dos o mas imagenes para luego usar esa relacion en diversasaplicaciones. En esta tarea una imagen IM (x) (llamada imagen movida) esdeformada para ajustarse a otra imagen IF (x) (llamada imagen fija). Enotras palabras, el registro es un problema de encontrar una transforma-cion de coordenadas T (x) que hace que IM (T (x)) se alinee espacialmentecon IF (x). Los parametros de T (x) pueden ser estimados mediante la min-imizacion de una funcion de costo. En este trabajo abordaremos el casodel registro rıgido, el cual la transformacion T solo consiste de rotaciones ytraslaciones. Proponemos una estrategia para la estimacion de las variablesen donde la matriz de rotacion la podemos aproximar por medio de mode-los sustitutos, reduciendo ası la complejidad y el tiempo de procesamiento.Mostramos que nuestro algoritmo minimiza la funcion de costo en cadaiteracion y garantizamos convergencia. Nuestra propuesta es evaluadoa me-diante en experimentos en imagenes 2D.
Palabras Clave. Registro rıgido, modelo sustituto, imagenes, optimizacion.
Algorithm based on Surrogate Models for Rigid ImageRegistration
Abstract
The image registration is important to find the spatial relationship betweentwo or more images, then this information can be used in several applica-tions. Therefore, an image IM (x) (moved image) is deformed for adjusting to
1

other image IF (x) (fixed image). In other words, the image registration prob-lem consists in finding a transform of coordinates T (x) such that IM (T (x))
is spatially aligned with IF (x). The parameters of T (x) can be estimatedthrough a function cost minimization. In this work, we will take the caseof the rigid image registration, that only consists in translations and ro-tations. We propose a strategy where the variables on the rotation matrixcan be approximate through surrogate models, reducing the complexity andthe computational burden. We show that own algorithm minimizes the costfunction in each step and we guarantee convergence. Our proposal is resultsare evaluated in experiments on 2D images.
Keywords. Rigid Registration, Surrogate Model, images, optimization.
1. Introduccion
El registro de imagenes es un procedimiento util para encontrar la relacionespacial entre dos o mas imagenes para luego usar esa relacion en diversasaplicaciones. Ası, una imagen IM (x) (llamada imagen movida) es deformadapara ajustarse a otra imagen IF (x) (llamada imagen fija). En otras palabras,el registro es un problema de encontrar una transformacion de coordenadasT (x) que hace que IM (x) se alinee espacialmente con IF (x). Por ejemplo,para cada punto de una imagen, x, de un la imagen IM (T (x)) su mapeopuede ser definido dentro de las coordenadas del espacio de la imagen IF co-mo: T (x) = Rx+b (donde R es una matriz y b es un vector de traslacion).Para hacer el registro de imagenes es necesario estimar los parametros paradescribir la transformacion T (x). Los parametros de T (x) pueden ser esti-mados mediante la minimizacion de una funcion de costo.
En este trabajo nosotros abordaremos el caso del registro rıgido, el cualconsiste de rotaciones y traslaciones. Por lo tanto, en nuestro estudio R esuna matriz de rotacion. Encontrar los valores de R es complicado debidoa la no–linealidad y a las restricciones sobre las variables: R debe ser unamatriz unitaria. Nosotros proponemos una estrategia para la minimizacionde una funcion de costo, C(T ; IF , IM ), en donde las variables en la matriz Rlas aproximamos por medio de modelos lineales, reduciendo ası la compleji-dad y el tiempo de procesamiento. Por medio de nuestra propuesta, nosotrosmostramos que nuestro algoritmo minimiza la funcion de costo en cada it-eracion y garantizamos convergencia. Los resultados de nuestra propuestason evaluado en experimentos en imagenes 2D.
2

(a) (b)
Figura 1: Ejemplo para el caso del registro rıgido: a) Imagen fija IF . b)Imagen movida IM . Las imagenes (a) y (b) son las mismas pero la segundatiene aplicada una rotacion y una traslacion.
2. Registro Rıgido
El registro rıgido de imagenes consiste en dadas dos imagenes IF e IM en-contrar los parametros de una transformacion lineal, T , que lleve IM a serIF . Es decir, hallar la matriz Rα y b tal que
IF (x) = IM (Rαx + b) + η (x) ; (1)
donde, en el caso 2D,
Rα =
[cosα − sinαsinα cosα
](2)
es la matriz de rotacion que depende del angulo α;
b =
[b1b2
](3)
es el vector de desplazamiento (o traslacion); x es una posicion en la imagenIF ; y η representa el ruido en las imagenes. La Figura 2 muestra un ejemplopara el caso del registro rıgido: las imagenes en Panel 1(a) y Panel 1(b) sonlas mismas pero la segunda tiene aplicada una rotacion y una traslacion quese necesitan estimar para que la imagen en Panel 1(b) sea igual a la delPanel 1(a).
Encontrar los valores de R es complicado debido a la no–linealidad y alas restricciones sobre las variables. Por lo tanto, nosotros proponemos unaestrategia donde simplificamos el problema en (1) reescribiendo la matriz R
3

por medio de aproximaciones trigonometricas. Despues, nosotros iterativa-mente vamos encontrando la transformacion rıgida. Los detalles de nuestromodelo se presentan en la siguiente seccion.
2.1. Filtrado de Imagenes
Ademas de la no–linealidad de los parametros, otro factor que afecta lacorrecta estimacion de R y b es el ruido, η, en las imagenes. Por esa razon,antes de estimar los parametros, una estrategia para minimizar el error delas estimaciones es realizar un filtrado sobre las imagenes IF y IM paraeliminar el ruido. Para esto se puede elegir cualquier tipo de suavizador.Este filtrado ayuda tambien a reducir el ancho de banda de las las imaginesy consecuentemente sus segundas derivadas, lo que sera util al momento dehacer aproximaciones en series de Taylor.
3. Propuesta
Dadas dos imagenes filtradas definimos una funcion de costo cuya mini-mizacion permita la estimacion de los parametros para el registro rıgido, αy b, establecidos en (1):
C(α,b; IF , IM ) =1
2
∑x∈Ω
[IF (x)− IM (Rαx + b)]2 ; (4)
donde Ω denota la interseccion de las dos imagenes. Ahora, debido a lasfunciones trigonometricas en la definicion de Rα, el problema planteado por(4) es altamente no lineal; lo que complica el algoritmo de optimizacion dadola facilidad de ser atrapado por mınimos locales. Muchos metodos numericoshan sido propuestos para resolver el problema en (1) [1][2]. Una solucionalternativa consiste en estimar un registro afın (la matriz no se restringe ytienen 4 grados de libertad) para luego mediante una eigen-descompocisionpara estimar una matriz retacion a partir de los vectores propios [4][5][6].
3.1. Modelo sustituto para el registro de imagenes
Este trabajo propone una estrategia iterativa para resolver (4) mediante eluso de un modelo sustituto que cuya minimizacion garantice una mejora en elcosto del problema original. Nuestra propuesta se basa en el supuesto de quecada iteracion del problema sustituto mejora solo un poco la solucion actual.Para lograr esto nosotros podemos restringir α y b a ser pequenos en cada
4

iteracion. Por lo tanto, si tenemos dichas restricciones, entonces cosα ≈ 1 ysinα ≈ α. Consecuentemente, la transformacion puede aproximarse por:
Rαx + b ≈[
1 −αα 1
] [x1
x2
]+
[b1b2
](5)
=
[x1
x2
]+
[−x2 1 0x1 0 1
]αb1b2
. (6)
Luego, si definimos
δ =[α b1 b2
]>(7)
y
X =
[−x2 1 0x1 0 1
](8)
tenemos que
T (x, δ)def= Rδ1x + [δ2, δ3]> ≈ x + Xδ; (9)
donde el vector δ contiene los parametros de la transformacion: angulo derotacion α y traslacion en dos ejes. Usando las aproximaciones y las defini-ciones introducidas, el problema se resume en actualizar iterativamente laImagen IM aplicando la transformacion actual:
xt+1 = T (xt, δt) (10)
con x0 = x y garantizando que la rotacion aplicada sea mediante una ma-triz unitaria. Ası, asumiendo el campo de vectores de posicion de pixelesactual xt, entonces la actualizacion al vector de parametros, δt, se obtienenmediante la solucion al problema
δt = argminδ
C(δ; IF , IM ) =1
2
∑x∈Ω
[IF (x)− IM
(xt + Xtδ
)]2sujeto a |δi| ≤ εi, i = 1, 2, 3. (11)
Para forzar a que las aproximaciones usadas sean validas, proponemos ε1 = 8grados, ε2 = ε3 = 5 pixeles.
3.1.1. Algoritmo de Optimizacion
El procedimiento propuesto se resume en iterar la solucion del problemarestringido (11) y actualizar el campo de posiciones con (10). Pero ademas
5

del planteamiento propuesto en la seccion anterior, nosotros proponemostomar de que el desplazamiento Xtδt de cada pixel es pequeno y las segundasderivadas de las imagenes son suaves ∇2IM . Por ello usamos un modelosubstituto basado en la expansion en series de Taylor de primer orden parasimplificar aun mas el problema en (11):
δt = argminδ
C(δ; IF , IM ) =1
2
∑x∈Ω
[IF (x)− IM
(xt)−∇xtIM
(xt)>
Xtδ]2
sujeto a |δi| ≤ εi, i = 1, 2, 3. (12)
Donde el gradiente de ∇xtIM lo podemos calcular utilizando diversos oper-adores o mascaras (por ejemplo el Operador de Sobel). En nuestro experi-mentos, nosotros utilizaremos:
∇xIM (x) =
[IM (x+e1)+IM (x−e1)
2IM (x+e2)+IM (x−e2)
2
](13)
con e1 y e2 son los vectores canonicos en R2. De esta manera, podemosobtener de forma explicita ∇C y ∇2C:
∇C (δ; IF , IM ) =
∂C∂α∂C∂b1∂C∂b2
= −
∑
x∈Ω g(x,xt
)∇xtIM
(xt)>
Xte1∑x∈Ω g
(x,xt
)∇xtIM
(xt)>
Xte2∑x∈Ω g
(x,xt
)∇xtIM
(xt)>
Xte3
(14)
donde los ei denotan al i-esimo vector canonico en tres dimensiones y g(x,xt
)=
IF (x)− IM(xt). Por otro lado, la entrada ij del Hessiano, ∇2C, esta dada
por:
∇2Cij (δ; IF , IM ) =[∑
x∈Ω
(∇xtIM
(xt)>
Xtei
)(∇xtIM
(xt)>
Xtej
)].
(15)Finalmente, para resolver el problema en (12), proponemos usar el meto-
do de Gauss-Seidel Proyectado (GSP), que consiste en simplemente resolvercada elemento del vector delta a la vez y en caso de que viole la restriccion,truncar su valor [3][7]. Algoritmo 1 resume los pasos de nuestra propuesta.
4. Experimentos y Resultados
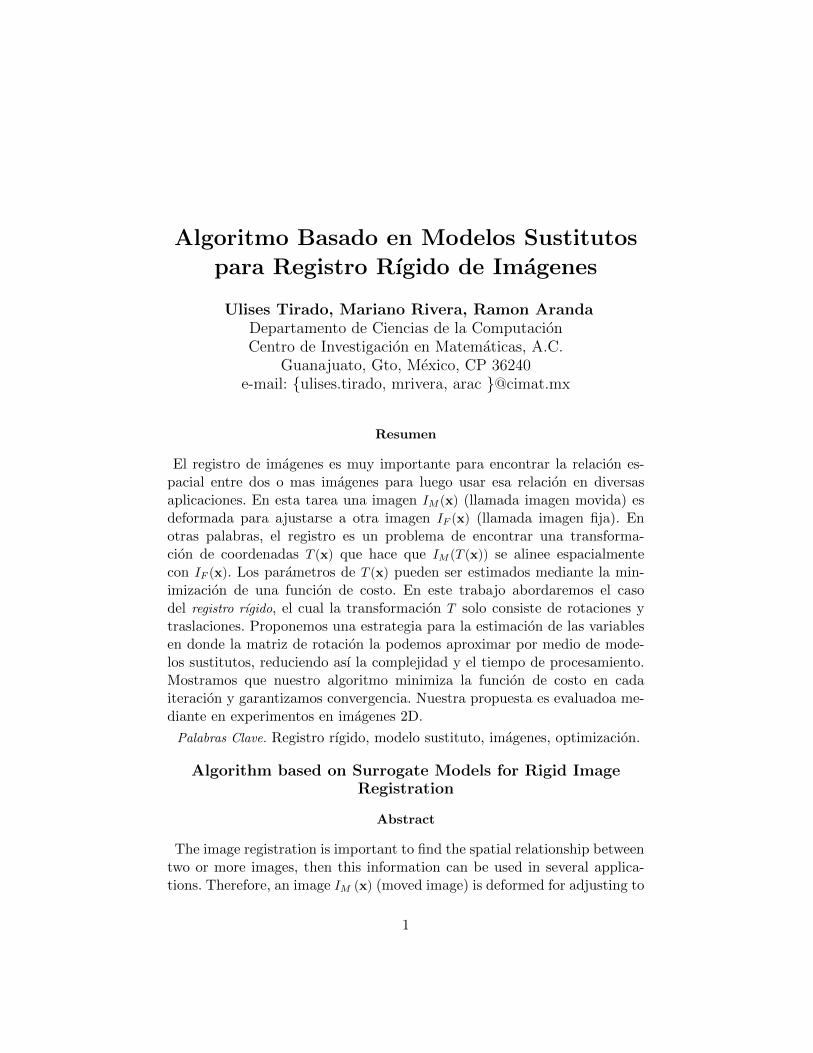
Para probar el desempeno de nuestro metodo, nosotros utilizamos la imagenmostrada en Panel 1(a) como imagen fija ( IF ). Luego le agregamos ruidoy le aplicamos diferentes transformaciones rıgidas. La Figura 2 muestra las
6
(a) (b)
(c) (d)
Figura 2: Diferentes transformaciones aplicadas a la imagen fija en Panel1(a).
(a) Iteracion 5 (b) Iteracion 10 (c) Final, iteracion 12
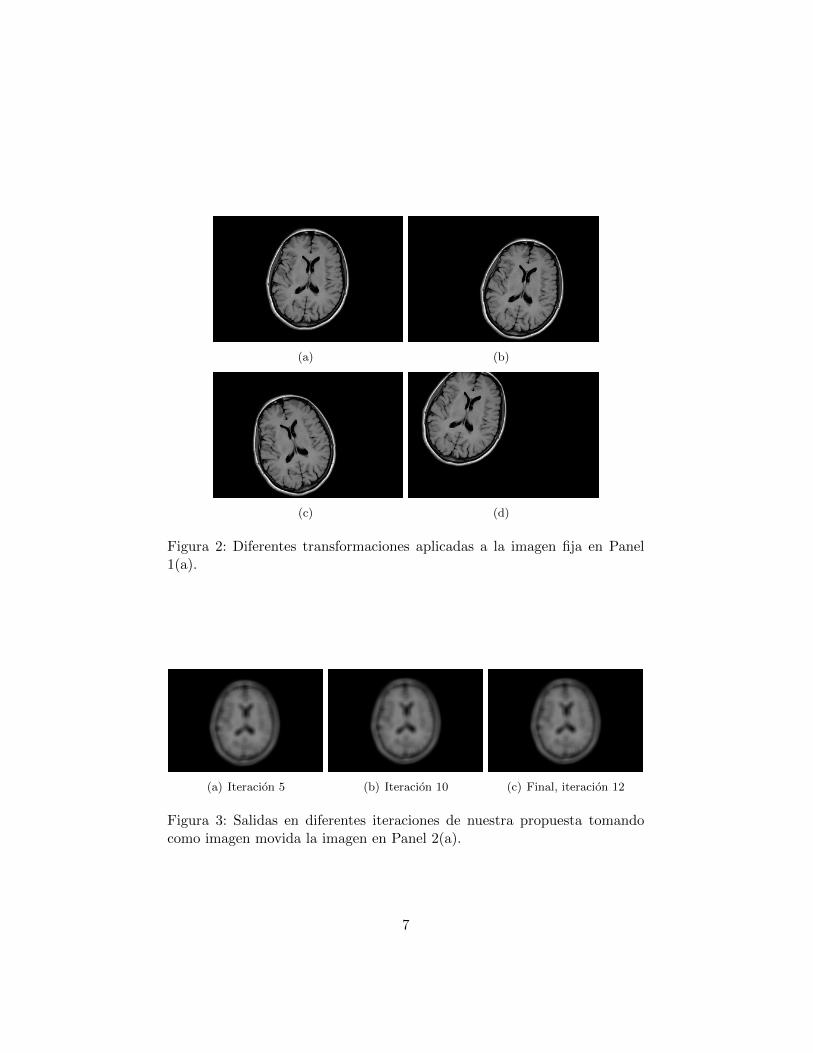
Figura 3: Salidas en diferentes iteraciones de nuestra propuesta tomandocomo imagen movida la imagen en Panel 2(a).
7
(a) Iteracion 5 (b) Iteracion 15 (c) Final, iteracion 27
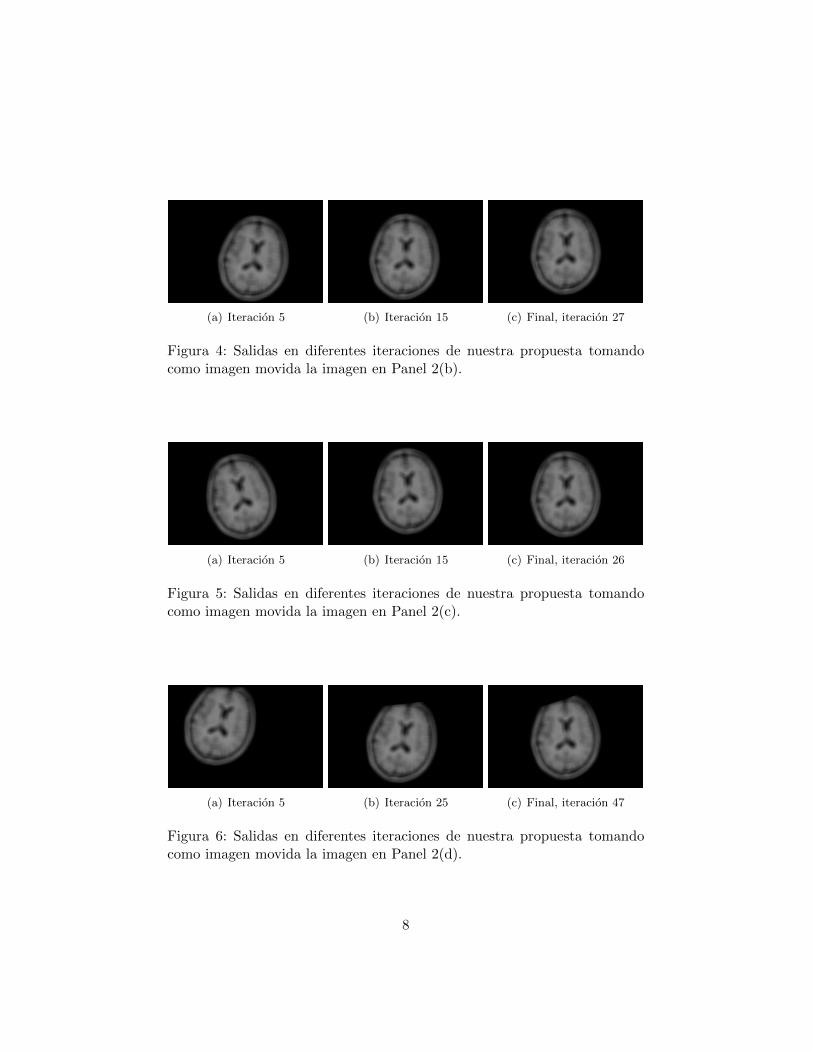
Figura 4: Salidas en diferentes iteraciones de nuestra propuesta tomandocomo imagen movida la imagen en Panel 2(b).
(a) Iteracion 5 (b) Iteracion 15 (c) Final, iteracion 26
Figura 5: Salidas en diferentes iteraciones de nuestra propuesta tomandocomo imagen movida la imagen en Panel 2(c).
(a) Iteracion 5 (b) Iteracion 25 (c) Final, iteracion 47
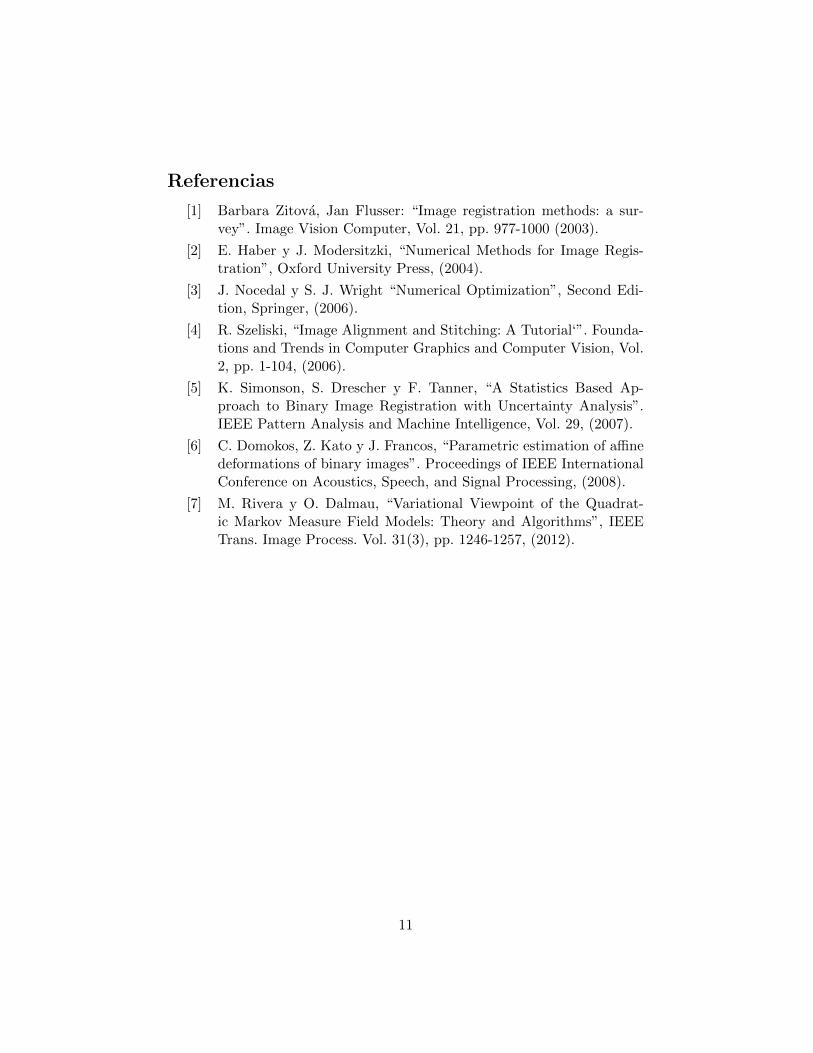
Figura 6: Salidas en diferentes iteraciones de nuestra propuesta tomandocomo imagen movida la imagen en Panel 2(d).
8

Algoritmo 1 Registro Rıgido Usando el Modelo Sustituto
(Dadas las imagenes: IF e IM)
// Valores iniciales
R0 ← I; // Matriz identidad
b0 ← 0; // Vector cero
t← 0;Repetir:
δt ← argminδ
1
2
∑x∈Ω
[IF (x)− IM
(xt)−∇xtIM
(xt)>
Xtδ]2
;
sujeto a |δi| ≤ εi, i = 1, 2, 3.
xt+1 ← T (xt, δt) ∀x ∈ Ω;
Rt+1 ← Rt
[cos δt1 − sin δt1sin δt1 cos δt1
];
bt+1 ← bt +
[δt1δt2
];
t← t+ 1;hasta Convergencia
Retornar como solucion Rt y bt
imagenes transformadas (IM ). Para disminuir el ruido en las imagenes apli-camos un filtro de caja con un tamano de ventada de 11×11.
La Figuras 3, 4, 5 y 6 muestran las salidas en diferentes iteracionesde nuestra propuesta. Visualmente uno puede ver como las imagenes sevan transformando hasta parecerse a la imagen original. Por otro lado, elCuadro 1 muestra las transformaciones reales aplicadas a las imagenes ylas estimaciones finales obtenidas para cada caso. Como podemos ver, losestimaciones obtenidas por medio de nuestra propuesta son cercanas a lastransformaciones reales aplicadas a cada imagen.
5. Conclusiones
En este trabajo se propuso un nuevo modelo para estimar transforma-ciones rıgidas. Nuestra propuesta se basa en usar un modelo sustituto me-diante aproximaciones trigonometricas. El procedimiento propuesto se re-sume en iterar un problema de mınimos cuadrados con restricciones de co-
9

Cuadro 1: Valores de las transformaciones aplicadas a las 4 imagenes en laFigura 2 y las estimaciones obtenidas por medio de nuestra propuesta.
Transformaciones Reales Estimacionesα (Grados) b (Pıxeles) α (Grados) b (Pıxeles)
Trans. 1 6
[00
]5,9928
[0,1176−0,0563
]Trans. 2 12
[3216
]11,9921
[32,663916,0903
]Trans. 3 15
[−2516
]14,9891
[−24,579016,3794
]Trans. 4 20
[−6532
]18,4220
[−64,492632,0782
]
ta y actualizar en cada iteracion el campo de posiciones. Pero ademas delplanteamiento propuesto, nosotros proponemos una alternativa de soluciontomando ventaja del modelo sustituto, ya que el desplazamiento de cadaiteracion es pequeno, se podemos utilizar la serie de Taylor de primer ordenpara simplificar aun mas la estimacion de los parametros. De acuerdo con losexperimentos, se puede ver que nuestra propuesta tiene un buen rendimientoaun cuando se tienen traslaciones y angulos de rotacion grandes y perdidade informacion (como en el caso del Panel 2(d)).
Aunque, todo nuestro analisis fue descrito para imagenes en dos dimen-siones, facilmente se puede extenderse para el registro rıgido de volumenesde imagenes en tres dimensiones teniendo en cuenta las consideraciones nece-sarias para el manejo de los 3 angulos. Como trabajo futuro, nosotros esta-mos estudiando las alternativas para estimar los parametros en del registrorıgido en el caso de tres dimensiones.
10
Referencias
[1] Barbara Zitova, Jan Flusser: “Image registration methods: a sur-vey”. Image Vision Computer, Vol. 21, pp. 977-1000 (2003).
[2] E. Haber y J. Modersitzki, “Numerical Methods for Image Regis-tration”, Oxford University Press, (2004).
[3] J. Nocedal y S. J. Wright “Numerical Optimization”, Second Edi-tion, Springer, (2006).
[4] R. Szeliski, “Image Alignment and Stitching: A Tutorial‘”. Founda-tions and Trends in Computer Graphics and Computer Vision, Vol.2, pp. 1-104, (2006).
[5] K. Simonson, S. Drescher y F. Tanner, “A Statistics Based Ap-proach to Binary Image Registration with Uncertainty Analysis”.IEEE Pattern Analysis and Machine Intelligence, Vol. 29, (2007).
[6] C. Domokos, Z. Kato y J. Francos, “Parametric estimation of affinedeformations of binary images”. Proceedings of IEEE InternationalConference on Acoustics, Speech, and Signal Processing, (2008).
[7] M. Rivera y O. Dalmau, “Variational Viewpoint of the Quadrat-ic Markov Measure Field Models: Theory and Algorithms”, IEEETrans. Image Process. Vol. 31(3), pp. 1246-1257, (2012).
11
Related Documents











