Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014 Опубликовать статью в журнале - http://publ.naukovedenie.ru Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected] 1 http://naukovedenie.ru 129TVN214 УДК 621.396 Дьяконов Сергей Владимирович ГКОУ ВПО Академия Федеральной службы охраны Российской Федерации (Академия ФСО России) Россия, Орёл 1 Сотрудник E-Mail: [email protected] Сивов Александр Юрьевич ГКОУ ВПО Академия Федеральной службы охраны Российской Федерации (Академия ФСО России) Россия, Орёл Сотрудник Кандидат технических наук E-Mail: [email protected] Алгоритм поиска координат размещения ретранслятора связи на беспилотном летательном аппарате, обеспечивающий минимизацию доли частотно-временного ресурса для ретрансляции сигналов Аннотация: В данной статье авторы продолжили исследования, представленные в ста- тье «Модель распределения частотно-временного ресурса в радиоинтерфейсе системы широ- кополосного беспроводного доступа с ретранслятором связи на беспилотном летательном ап- парате». Модель, описанная в предыдущей статье, позволяет определить минимальное коли- чество частотно-временного ресурса, необходимого для ретрансляции сигналов через ре- транслятор связи на беспилотном летательном аппарате. Входными параметрами разработан- ной модели являются координаты размещения базовой станции, абонентской станции, беспи- лотного летательного аппарата с ретранслятором связи. В результате исследований установ- лено, что выходной параметр носит нелинейный и ступенчатый характер, имеет несколько экстремумов, а также зависит от расстояния между базовой и абонентской станцией. Оптимальное размещение беспилотного летательного аппарата позволяет уменьшить частотно-временной ресурс, необходимый для ретрансляции. Таким образом, поиск координат размещения беспилотного летательного аппарата является актуальной задачей. Авторы предлагают использовать методы поисковой оптимизации. С целью снижения вычислительной сложности авторами был предложен модифицированный алгоритм Джарвиса. Алгоритм поиска координат размещения беспилотного летательного аппарата с ретранслятором связи учитывает изменение отношения сигнал шум в восходящих и нисходящих каналах. 1 302034, г. Орёл, ул. Приборостроительная, д. 35

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
1
http://naukovedenie.ru 129TVN214
УДК 621.396
Дьяконов Сергей Владимирович ГКОУ ВПО Академия Федеральной службы охраны
Российской Федерации (Академия ФСО России)
Россия, Орёл1
Сотрудник
E-Mail: [email protected]
Сивов Александр Юрьевич ГКОУ ВПО Академия Федеральной службы охраны
Российской Федерации (Академия ФСО России)
Россия, Орёл
Сотрудник
Кандидат технических наук
E-Mail: [email protected]
Алгоритм поиска координат размещения
ретранслятора связи
на беспилотном летательном аппарате,
обеспечивающий минимизацию доли
частотно-временного ресурса для ретрансляции сигналов
Аннотация: В данной статье авторы продолжили исследования, представленные в ста-
тье «Модель распределения частотно-временного ресурса в радиоинтерфейсе системы широ-
кополосного беспроводного доступа с ретранслятором связи на беспилотном летательном ап-
парате». Модель, описанная в предыдущей статье, позволяет определить минимальное коли-
чество частотно-временного ресурса, необходимого для ретрансляции сигналов через ре-
транслятор связи на беспилотном летательном аппарате. Входными параметрами разработан-
ной модели являются координаты размещения базовой станции, абонентской станции, беспи-
лотного летательного аппарата с ретранслятором связи. В результате исследований установ-
лено, что выходной параметр носит нелинейный и ступенчатый характер, имеет несколько
экстремумов, а также зависит от расстояния между базовой и абонентской станцией. Оптимальное размещение беспилотного летательного аппарата позволяет уменьшить
частотно-временной ресурс, необходимый для ретрансляции. Таким образом, поиск
координат размещения беспилотного летательного аппарата является актуальной задачей.
Авторы предлагают использовать методы поисковой оптимизации. С целью снижения
вычислительной сложности авторами был предложен модифицированный алгоритм
Джарвиса.
Алгоритм поиска координат размещения беспилотного летательного аппарата с
ретранслятором связи учитывает изменение отношения сигнал шум в восходящих и
нисходящих каналах.
1 302034, г. Орёл, ул. Приборостроительная, д. 35
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
2
http://naukovedenie.ru 129TVN214
Ключевые слова: Беспилотный летательный аппарат; ретранслятор связи; система
широкополосного беспроводного доступа; оптимизация топологической структуры сети; рас-
пределение частотно-временного ресурса. Идентификационный номер статьи в журнале 129TVN214
Введение
Современный этап развития региональных сетей широкополосного беспроводного
доступа (ШБД) характеризуется увеличением зон обслуживания пользователей и
расширением перечня предоставляемых им услуг связи. В 2006 году была организована
целевая группа по созданию стандарта IEEE 802.16j [1, 2], предусматривающего применение
стационарных ретрансляторов связи (РС) для увеличения зон обслуживания базовых
станций (БС). При решении некоторых задач государственного управления возникают
ситуации, когда требуется кратковременно расширить зону обслуживания БС, например при
обеспечении связи из мест техногенных аварий. Применение стационарных РС в данном
случае не позволит оперативно менять топологическую структуру сети ШБД ввиду ее низкой
мобильности. Поэтому для повышения мобильности сети ШБД (не путать с мобильностью
абонентов) предлагается размещать РС на подвижных объектах, в частности на беспилотных
летательных аппаратах (БЛА).
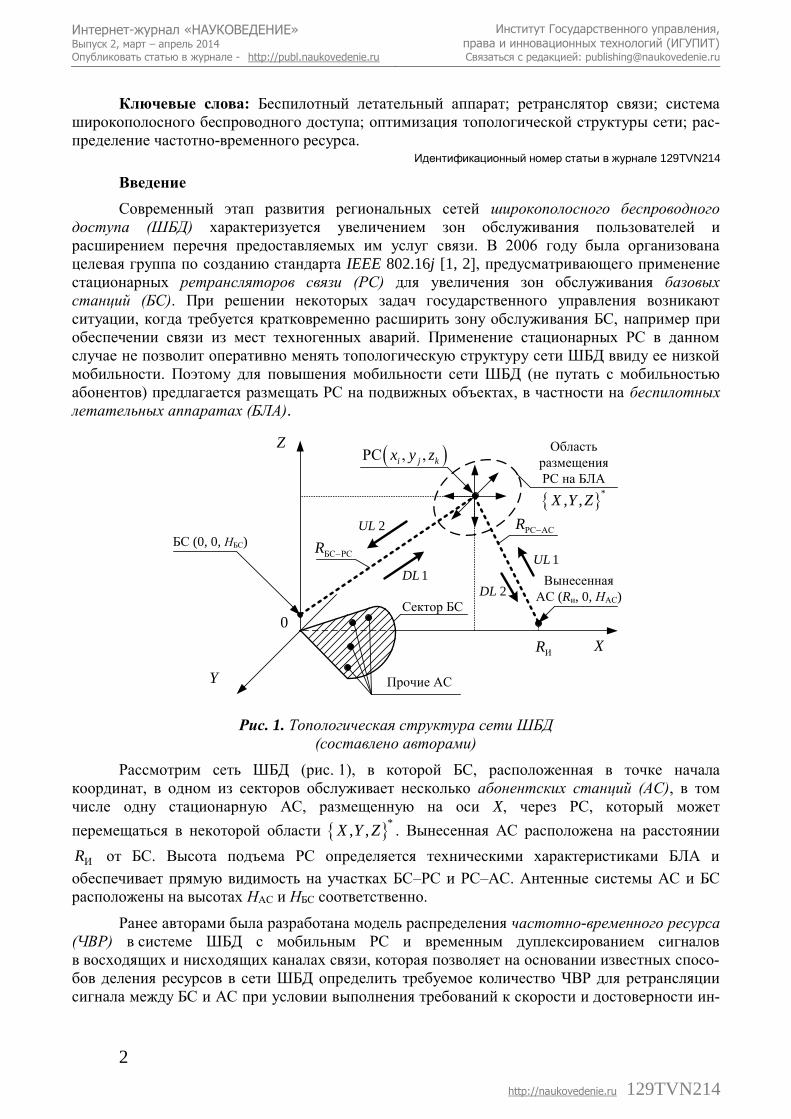
Рис. 1. Топологическая структура сети ШБД
(составлено авторами)
Рассмотрим сеть ШБД (рис. 1), в которой БС, расположенная в точке начала
координат, в одном из секторов обслуживает несколько абонентских станций (АС), в том
числе одну стационарную АС, размещенную на оси X, через РС, который может
перемещаться в некоторой области . Вынесенная АС расположена на расстоянии
от БС. Высота подъема РС определяется техническими характеристиками БЛА и
обеспечивает прямую видимость на участках БС–РС и РС–АС. Антенные системы АС и БС
расположены на высотах НАС и НБС соответственно.
Ранее авторами была разработана модель распределения частотно-временного ресурса
(ЧВР) в системе ШБД с мобильным РС и временным дуплексированием сигналов
в восходящих и нисходящих каналах связи, которая позволяет на основании известных спосо-
бов деления ресурсов в сети ШБД определить требуемое количество ЧВР для ретрансляции
сигнала между БС и АС при условии выполнения требований к скорости и достоверности ин-
Y
Z
0
БС (0, 0, НБС)БС РСR
РС АСR
Вынесенная
АС (Rи, 0, НАС)
ИR X
РС , ,i j kx y zОбласть
размещения
РС на БЛА
Прочие АС
Сектор БС
1DL
2DL
2UL
1UL
*
, ,X Y Z
*
, ,X Y Z
ИR
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
3
http://naukovedenie.ru 129TVN214
формационного обмена. На основе модели требуется разработать алгоритм поиска координат
размещения РС на БЛА, обеспечивающий минимизацию доли ЧВР для ретрансляции сигна-
лов между АС и БС при условии выполнения требований к скорости и достоверности инфор-
мационного обмена.
1. Модель распределения частотно-временного ресурса в радиоинтерфейсе
системы широкополосного беспроводного доступа с ретранслятором связи на
беспилотном летательном аппарате
Под ЧВР в работе понимается вся совокупность несущих сигналов с ортогональным
частотным разделением (OFDM – Orthogonal frequency division multiplexing – ортогональное
частотное разделение каналов) на длительности одного цикла передачи в одном рабочем
секторе БС. Доля ЧВР – отношение части ЧВР, требуемой для обеспечения ретрансляции
сигнала между БС и АС ко всему ЧВР:
. (1)
где – весь ЧВР сектора БС; – ЧВР, требуемый для ретрансляции
сигнала; – l-я точка, принадлежащая области допустимых координат размещения
РС на БЛА (Рис. 1); , где , X*– множество допустимых координат
по оси X; , где , Y* – множество допустимых координат по оси Y; ,
где , Z* – множество допустимых координат по оси Z.
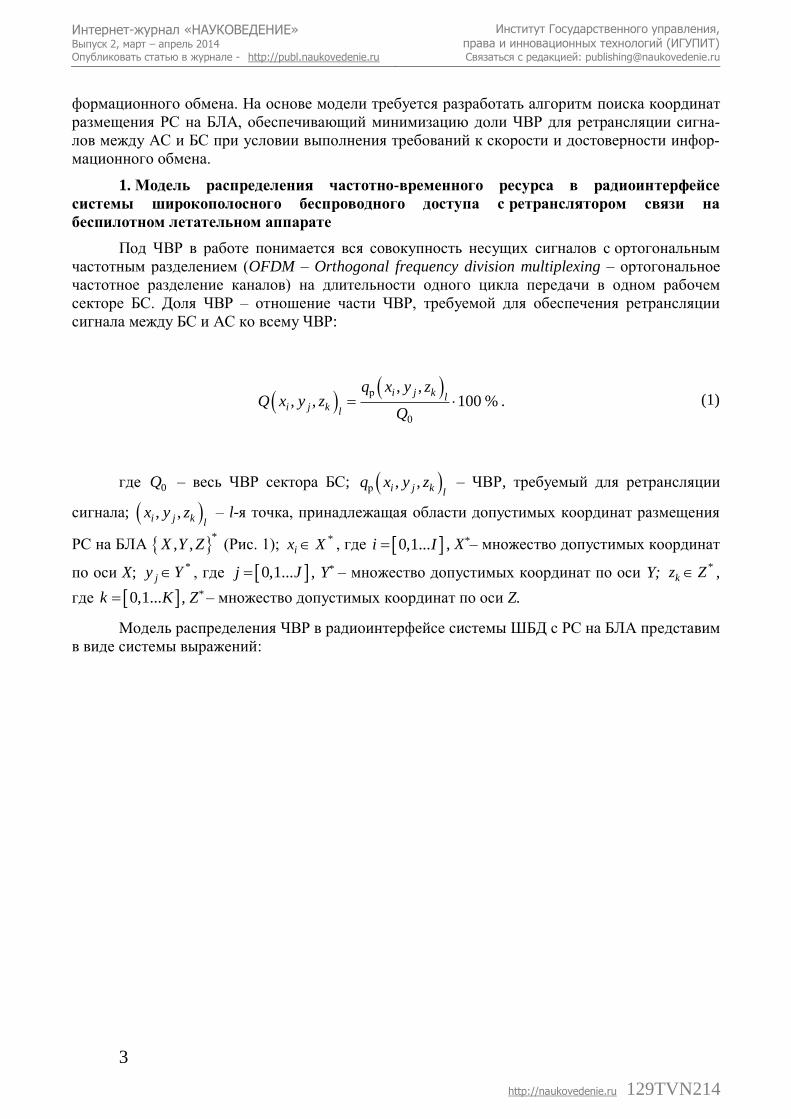
Модель распределения ЧВР в радиоинтерфейсе системы ШБД с РС на БЛА представим
в виде системы выражений:
р
0
, ,, , 100 %
i j k li j k l
q x y zQ x y z
Q
0Q р , ,i j k lq x y z
, ,i j k lx y z
*
, ,X Y Z *ix X 0,1...i I
*jy Y 0,1...j J *
kz Z
0,1...k K
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
4
http://naukovedenie.ru 129TVN214
(2)
где – общее количество поднесущих, требуемое для обеспечения ретрансляции
сигнала между БС и АС на участках нисходящих каналов DL (Downlink – нисходящая линия
связи) и восходящих каналов UL (Uplink – восходящая линия связи); и –
количество информационных и пилотных поднесущих в «кластере» (совокупность несущих
DL); и – количество информационных и пилотных поднесущих во «фрагменте»
(совокупность несущих UL) [3, 4]; – длительность цикла передачи (фрейма); и
– требуемая скорость передачи информации в восходящих и нисходящих каналах,
определяемая пользователем; – количество используемых поднесущих в OFDMA
символе [3, 4]; – количество OFDMA-символов в кадре (фрейме) [3, 4]; и –
информационные емкости одной поднесущей для участков восходящих и нисходящих
каналов, определяемая следующим выражением [5, 6]:
*инфпод под K под К
1 инф пилот под K Н 2инф 1 1
*инфпод под K под К
2 инф пилот под K Н 2инф 2 2
под под Ф п1 инф пилот
, , ;, ,
, , ;, ,
, ,
DLUL DL
DL i j k lDL DL i j k l
DLUL DL
DL i j k lDL DL i j k l
UL i j k l
R TN x y z N N
N C h x y z
R TN x y z N N
N C h x y z
N x y z N N
*инфод Ф
под Ф Н 2инф 1 1
*инфпод под Ф под Ф
2 инф пилот под Ф Н 2инф 2 2
2 2 * 61, 2, 1, 2 1/2 ош
подр 1
;, ,
, , ;, ,
, , 1 10 ;
, ,
ULUL DL
UL UL i j k l
ULUL DL
UL i j k lUL UL i j k l
UL UL DL DL i j k QPSKl
i j k DLl
R T
N C h x y z
R TN x y z N N
N C h x y z
h x y z h P
q x y z N x
под2
под под1 2
под0 исп
р 0
р
0
, , , ,
, , , , ;
;
, , ;
, ,, , 100 %;
i j k DL i j kl l
UL i j k UL i j kl l
OFDMA
i j k l
i j k li j k l
y z N x y z
N x y z N x y z
Q N N
q x y z Q
q x y zQ x y z
Q
подN
под KинфN под К
пилотN
под ФинфN под Ф
пилотN
UL DLT *
инфULR
*инфDLR
подиспN
OFDMAN НULC Н
DLC
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
5
http://naukovedenie.ru 129TVN214
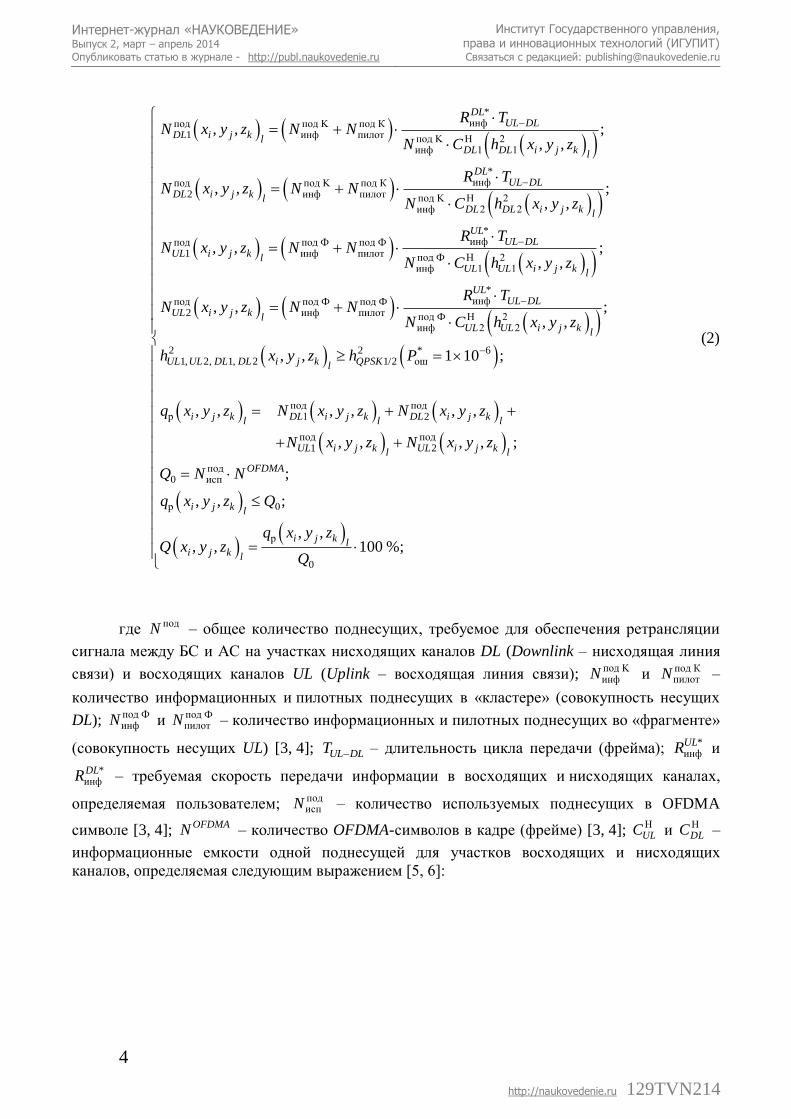
(3)
где – отношение сигнал-шум (ОСШ) на входах приемников
, , , для l-й точки размещения РС
на БЛА.
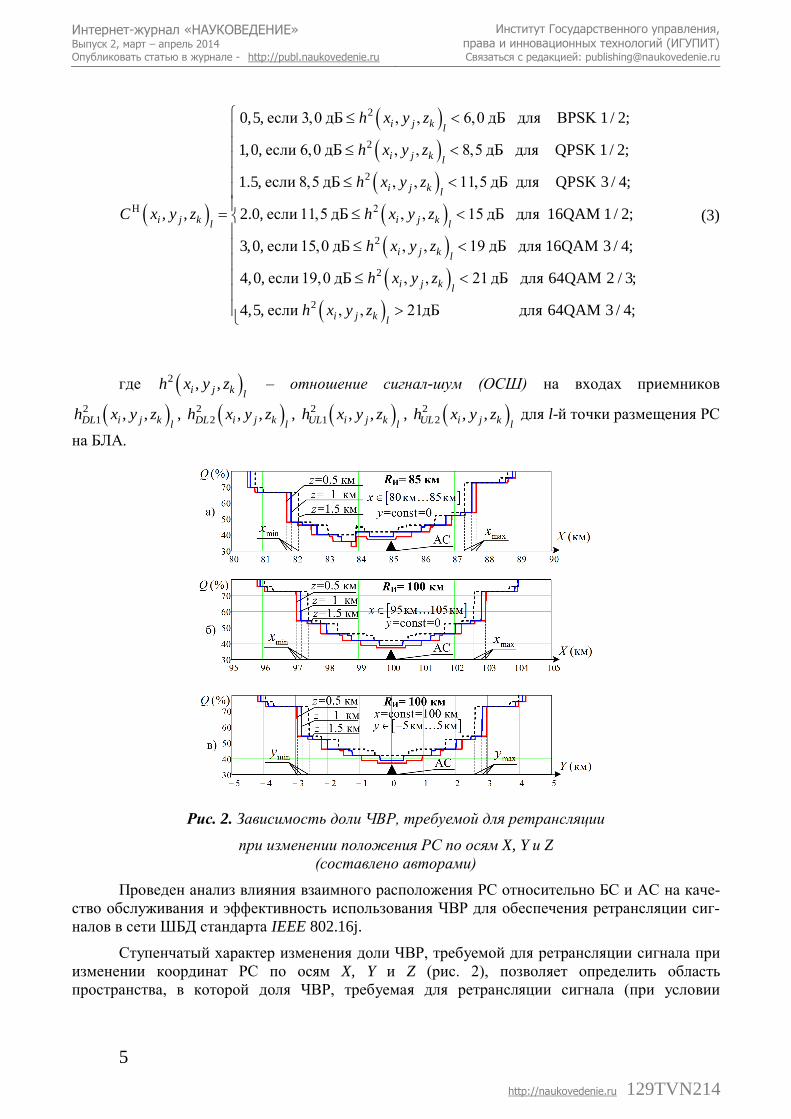
Рис. 2. Зависимость доли ЧВР, требуемой для ретрансляции
при изменении положения РС по осям X, Y и Z
(составлено авторами)
Проведен анализ влияния взаимного расположения РС относительно БС и АС на каче-
ство обслуживания и эффективность использования ЧВР для обеспечения ретрансляции сиг-
налов в сети ШБД стандарта IEEE 802.16j.
Ступенчатый характер изменения доли ЧВР, требуемой для ретрансляции сигнала при
изменении координат РС по осям X, Y и Z (рис. 2), позволяет определить область
пространства, в которой доля ЧВР, требуемая для ретрансляции сигнала (при условии
2
2
2
Н 2
0,5, если 3,0 дБ , , 6,0 дБ для BPSK
1,0, если 6,0 дБ , , 8,5 дБ для
1.5, если 8,5 дБ , , 11,5 дБ для
, , 2.0, если 11,5 дБ , , 15 дБ дл
1 / 2;
QPSK 1 / 2;
QPSK ;
я
3 / 4
i j k l
i j k l
i j k l
i j k i j kl l
h x y z
h x y z
h x y z
C x y z h x y z
2
2
2
3,0, если 15,0 дБ , , 19 дБ для
4,0, если 19,0 дБ , , 21 дБ
16QAM 1 / 2;
16QAM 3 / 4;
64QAM 2 / 3;
64QAM 3 / 4;
для
4,5, если , , 21дБ для
i j k l
i j k l
i j k l
h x y z
h x y z
h x y z
2 , ,i j k lh x y z
21 , ,DL i j k l
h x y z 22 , ,DL i j k l
h x y z 21 , ,UL i j k l
h x y z 22 , ,UL i j k l
h x y z
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
6
http://naukovedenie.ru 129TVN214
выполнения требований к скорости и достоверности информационного обмена), остается
неизменной.
В целях минимизации доли ЧВР, требуемой для ретрансляции сигнала между БС и АС
при условии выполнения требований к скорости и достоверности информационного обмена,
необходимо разработать алгоритм поиска рациональной области размещения РС.
2. Постановка задачи на разработку алгоритма поиска координат размещения
ретранслятора связи на беспилотном летательном аппарате
Модель распределения ресурсов в радиоинтерфейсе системы ШБД с РС на БЛА
позволяет установить зависимость доли ЧВР, требуемой для ретрансляции сигнала между БС
и АС через РС, от координат размещения РС относительно БС и АС (рис. 2).
Сложный, нелинейный характер зависимости целевой функции от координат
размещения РС относительно БС и АС, изменяющийся при изменении расстояния между АС
и БС, не позволяет однозначно определить направления поиска минимума целевой функции.
Необходимо разработать алгоритм поиска множества рациональных значений
координат размещения РС на БЛА на множестве допустимых значений координат
, в которых обеспечивается минимизация целевой функции (1), то есть
минимальный расход ЧВР, при условии выполнения требований к скорости и достоверности
передачи данных в радиоканале:
, (4)
Исходными данными для работы алгоритма являются:
• матрица высот местности размещения системы связи ;
• координаты размещения БС (0, 0, НБС) и АС (RИ, 0, НАС);
• технические характеристики БС, АС и РС;
• величина шага поиска по координатам X, Y и Z ( соответственно).
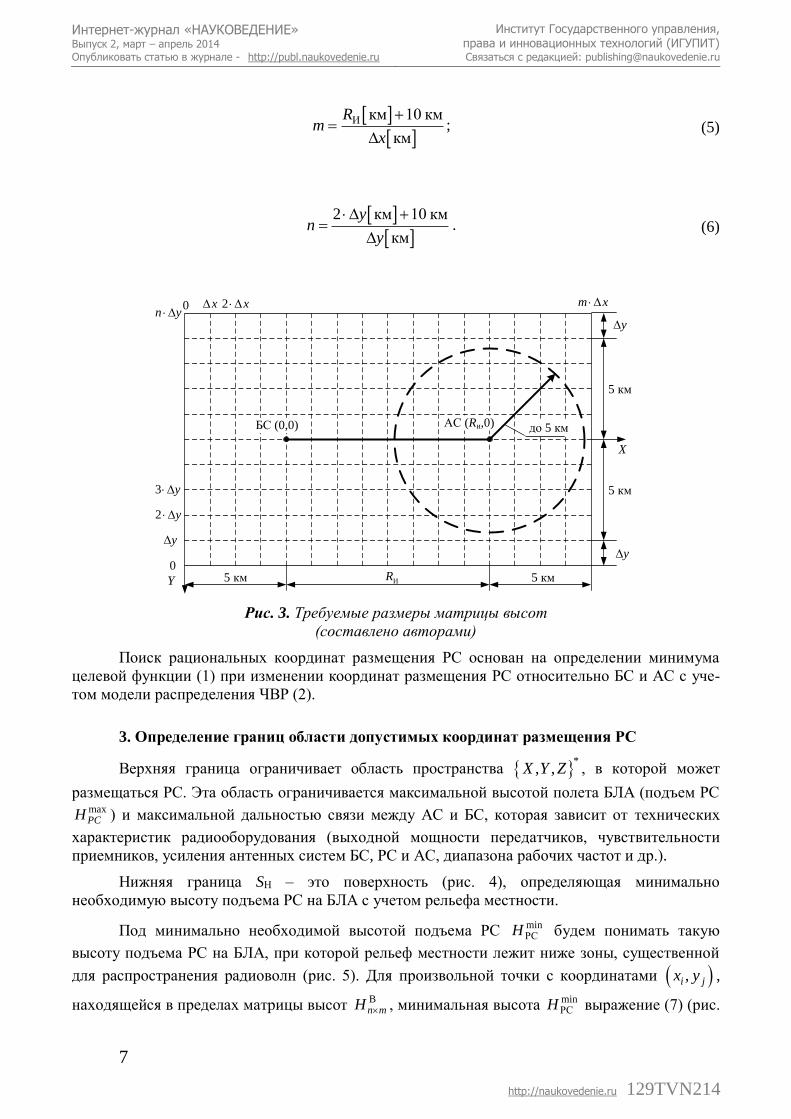
Матрица высот задается с шагом поиска по координатам X и Y
соответственно (рис. 3). Ось X параллельна отрезку, соединяющему АС и БС. РС не может
находиться на расстоянии более 5 км от АС, согласно рекомендациям [5].
Тогда размерность матрицы высот будет определяться следующими выражениями:
рац
РС, ,x y z
*
, ,X Y Z
рац *
РС, , , ,
*
инф инф
*ош ош
arg min , ,i j k lx y z X Y ZUL DL UL DL
Q x y z
R R
P P
Bn mH
, иx y z
Bn mH иx y
BH
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
7
http://naukovedenie.ru 129TVN214
; (5)
. (6)
Рис. 3. Требуемые размеры матрицы высот
(составлено авторами)
Поиск рациональных координат размещения РС основан на определении минимума
целевой функции (1) при изменении координат размещения РС относительно БС и АС с уче-
том модели распределения ЧВР (2).
3. Определение границ области допустимых координат размещения РС
Верхняя граница ограничивает область пространства , в которой может
размещаться РС. Эта область ограничивается максимальной высотой полета БЛА (подъем РС
) и максимальной дальностью связи между АС и БС, которая зависит от технических
характеристик радиооборудования (выходной мощности передатчиков, чувствительности
приемников, усиления антенных систем БС, РС и АС, диапазона рабочих частот и др.).
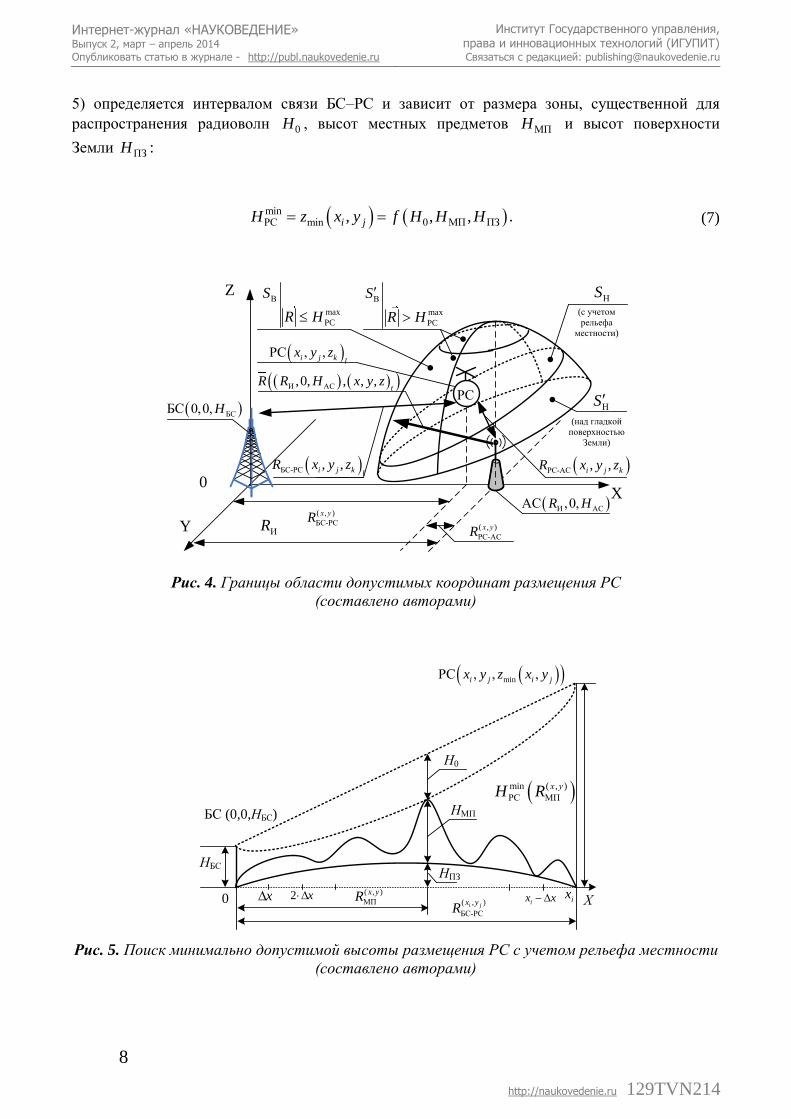
Нижняя граница SН – это поверхность (рис. 4), определяющая минимально
необходимую высоту подъема РС на БЛА с учетом рельефа местности.
Под минимально необходимой высотой подъема РС будем понимать такую
высоту подъема РС на БЛА, при которой рельеф местности лежит ниже зоны, существенной
для распространения радиоволн (рис. 5). Для произвольной точки с координатами ,
находящейся в пределах матрицы высот , минимальная высота выражение (7) (рис.
И км 10 км
км
Rm
x
2 км 10 км
км
yn
y
ИR 5 км5 км
5 км
5 км
БС (0,0) АС (Rи,0) до 5 км
x
y
2 y
0n y
2 x
3 y
m x
y
y
X
Y
0
*
, ,X Y Z
maxPCH
minРСH
,i jx y
Bn mH
minРСH
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
8
http://naukovedenie.ru 129TVN214
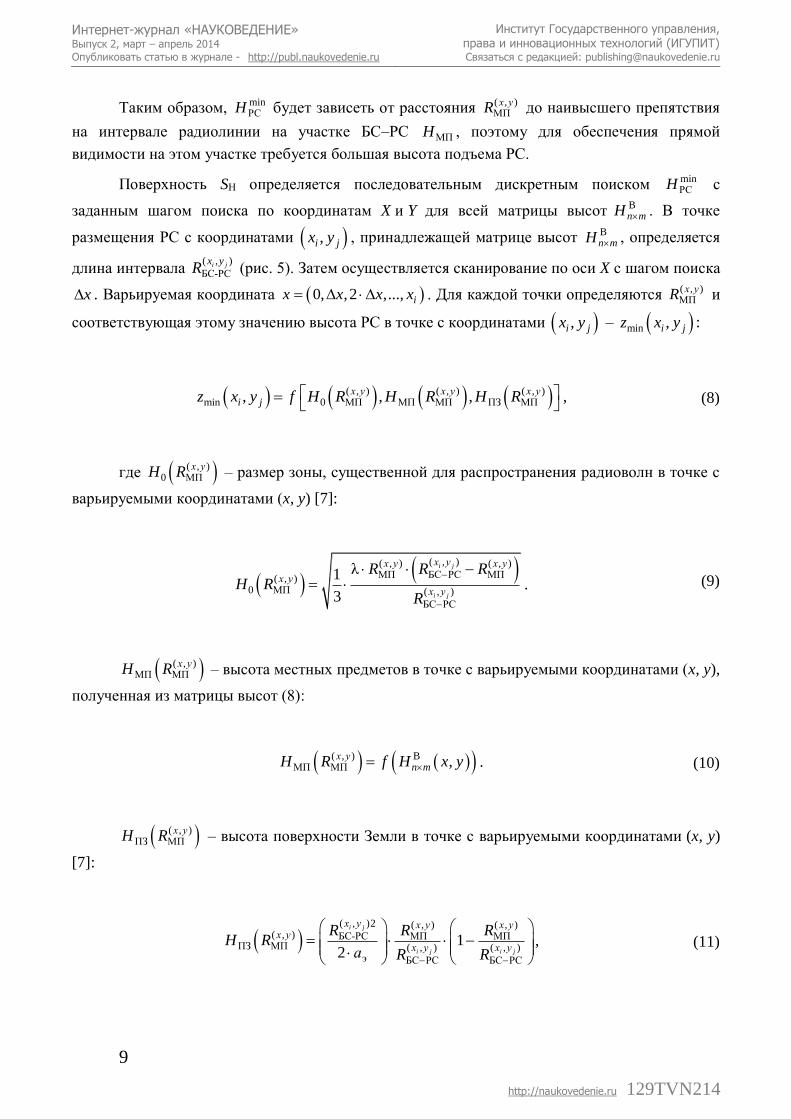
5) определяется интервалом связи БС–РС и зависит от размера зоны, существенной для
распространения радиоволн , высот местных предметов и высот поверхности
Земли :
. (7)
Рис. 4. Границы области допустимых координат размещения РС
(составлено авторами)
Рис. 5. Поиск минимально допустимой высоты размещения РС с учетом рельефа местности
(составлено авторами)
0H МПH
ПЗH
minРС min 0 МП ПЗ, , ,i jH z x y f H H H
ИR
X
Y
Z
0 БС-РС , ,i j k l
R x y z
( , )
БС-РС
х yR( , )
РС-АС
х yR
И АC,0, , , ,t
R R H x y z
РС-АС , ,i j kR x y z
НS
РС
РС , ,i j k lx y z
В
max
PC
S
R H
В
max
PC
S
R H
БCБС 0,0, H
И АCАC ,0,R H
НS
(над гладкой
поверхностью
Земли)
(с учетом
рельефа
местности)
БС (0,0,НБС)
НБС
НМП
НПЗ
Н0
( , )
БС-РСi jx y
R
( , )
МП
x yR
minРС , , ,i j i jx y z x y
min ( , )
РС МП
х yH R
Х0 x 2 x ixix x
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
9
http://naukovedenie.ru 129TVN214
Таким образом, будет зависеть от расстояния до наивысшего препятствия
на интервале радиолинии на участке БС–РС , поэтому для обеспечения прямой
видимости на этом участке требуется большая высота подъема РС.
Поверхность SН определяется последовательным дискретным поиском с
заданным шагом поиска по координатам X и Y для всей матрицы высот . В точке
размещения РС с координатами , принадлежащей матрице высот , определяется
длина интервала (рис. 5). Затем осуществляется сканирование по оси X с шагом поиска
. Варьируемая координата . Для каждой точки определяются и
соответствующая этому значению высота РС в точке с координатами – :
, (8)
где – размер зоны, существенной для распространения радиоволн в точке с
варьируемыми координатами (x, y) [7]:
. (9)
– высота местных предметов в точке с варьируемыми координатами (x, y),
полученная из матрицы высот (8):
. (10)
– высота поверхности Земли в точке с варьируемыми координатами (x, y)
[7]:
, (11)
minРСH ( , )
МПх yR
МПH
minРСH
Bn mH
,i jx y Bn mH
( , )
БС-РСi jx y
R
x 0, ,2 ,..., ix x x x ( , )МП
х yR
,i jx y min ,i jz x y
( , ) ( , ) ( , )min 0 МП МП МП ПЗ МП, , ,х y х y х y
i jz x y f H R H R H R
( , )0 МП
х yH R
( , )( , ) ( , )
МП БС РС МП( , )0 МП ( , )
БС РС
λ1
3
i j
i j
х yх y х y
х y
х y
R R RH R
R
( , )МП МП
х yH R
( , ) BМП МП ,х y
n mH R f H x y
( , )ПЗ МП
х yH R
( , )2 ( , ) ( , )
( , ) БС-РС МП МППЗ МП ( , ) ( , )
э БС РС БС РС
12
i j
i j i j
х y х y х yх y
х y х y
R R RH R
а R R
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
10
http://naukovedenie.ru 129TVN214
где λ – длинна волны; – эквивалентный радиус Земли. Тогда минимальная высота
подъема РС (рис. 5) для каждой точки с координатами будет определяться
следующим выражением:
С учетом принятых обозначений нижняя граница SН будет определяться множеством
дискретных точек, заданных с шагом , по координатам X и Y соответственно:
(13)
Верхняя граница области допустимых координат размещения РС на БЛА – это часть
сферы – поверхность SВ (рис. 3). Центр сферы расположен в точке с координатами (RИ, 0, НАС)
– электрическом центре антенной системы АС [8]:
(14)
где ; – радиус сферы, расстояние от АС до точек
пространства, в которых ОСШ на входе приемника РС соответствует порогу переключения
модуляции и кодирования с QPSK 1/2 на BPSK 1/2 (3). Радиус сферы определяется при
условии:
эа
min ,i jz x y ,i jx y
( , )( , ) ( , )МП БС РС МП
( , )
БС-РС( , )
( , )БС РСmin B МП БС( , )
МП( , )2 ( , ) ( , )БС РС МП МП
( , ) ( , , )э и БС РС
λ1
3
, max
12
i j
i j
i j
i j
i j
x yх y х y
x y
x yх y
i j х y
x y х y х y
х y х yx y
R R R
R
Rz x y H R H
R
R R R
а R R
БС
( , )( , )МП БС РС
.(12)
0, ... i jx yх y
H
R x R
иx y
Н min, , ,
0, ,2 ... ;
0... ;
0, ,2 ... ;
0... .
i j i j
i
j
S x y z x y
x x x n x
i n
y y y m y
j m
И
В
АС
sin θ cos φ ;
0 sin θ sin φ ;
cos θ ;
x R R
S y R
z Н R
θ 0 π , φ 0 2π R
R

Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
11
http://naukovedenie.ru 129TVN214
(15)
где – координаты t-й точки сферы, t = [0,1…T].
Так как сфера является непрерывной фигурой, а поиск происходит дискретно, то для
каждой точки в плоскости {X,Y} c координатами определяется :
(16)
Пересечение поверхностей, заданных выражениями (13) и (16), ограничивает
объемную фигуру Vдоп, внутри которой расположены точки, принадлежащие области
допустимых координат размещения РС .
(17)
На рисунке 6 показаны область допустимых координат размещения РС Vдоп и ее
положение над поверхностью Земли для протяженности интервала RИ = 100 км при
, .
И АC2 2 2
1/2 1 1/2
2 22 1/2
,0, , , ,
, , ;
, , ;
t
BPSK UL QPSKt
UL QPSKt
R R R H x y z
h h x y z h
h x y z h
, ,t
x y z
,i jx y maxz
max
2 21 1/2
2 21 1/2
2 22 1/2
, ,
, , , ;
, , , ;
, , , .
i j i j
UL i j i j QPSK
UL i j i j QPSK
UL i j i j QPSK
z x y z x y
h x y z x y h
h x y z x y z h
h x y z x y h
*
, ,X Y Z
доп
min max
, ,
0, ,2 ... ;
0... ;
0, ,2 ... ;
0... ;
, .... , .
i j
i
j
i j i j
V x y z
x x x n x
i n
y y y m y
j m
z z x y z x y
0,1 кмx 0,1 кмy 0,05 кмz
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
12
http://naukovedenie.ru 129TVN214
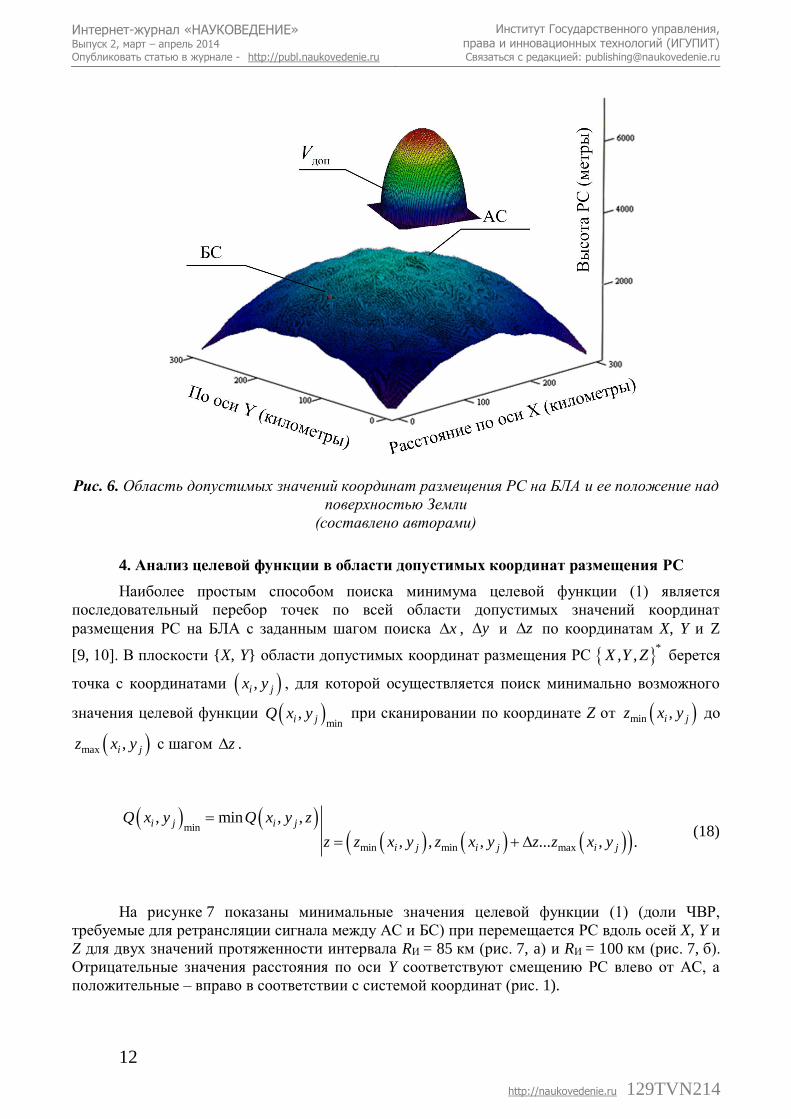
Рис. 6. Область допустимых значений координат размещения РС на БЛА и ее положение над
поверхностью Земли
(составлено авторами)
4. Анализ целевой функции в области допустимых координат размещения РС
Наиболее простым способом поиска минимума целевой функции (1) является
последовательный перебор точек по всей области допустимых значений координат
размещения РС на БЛА с заданным шагом поиска , и по координатам X, Y и Z
[9, 10]. В плоскости {X, Y} области допустимых координат размещения РС берется
точка с координатами , для которой осуществляется поиск минимально возможного
значения целевой функции при сканировании по координате Z от до
с шагом .
(18)
На рисунке 7 показаны минимальные значения целевой функции (1) (доли ЧВР,
требуемые для ретрансляции сигнала между АС и БС) при перемещается РС вдоль осей X, Y и
Z для двух значений протяженности интервала RИ = 85 км (рис. 7, a) и RИ = 100 км (рис. 7, б).
Отрицательные значения расстояния по оси Y соответствуют смещению РС влево от АС, а
положительные – вправо в соответствии с системой координат (рис. 1).
x y z
*
, ,X Y Z
,i jx y
min
,i jQ x y min ,i jz x y
max ,i jz x y z
min
min min max
, min , ,
, , , ... , .
i j i j
i j i j i j
Q x y Q x y z
z z x y z x y z z x y
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
13
http://naukovedenie.ru 129TVN214
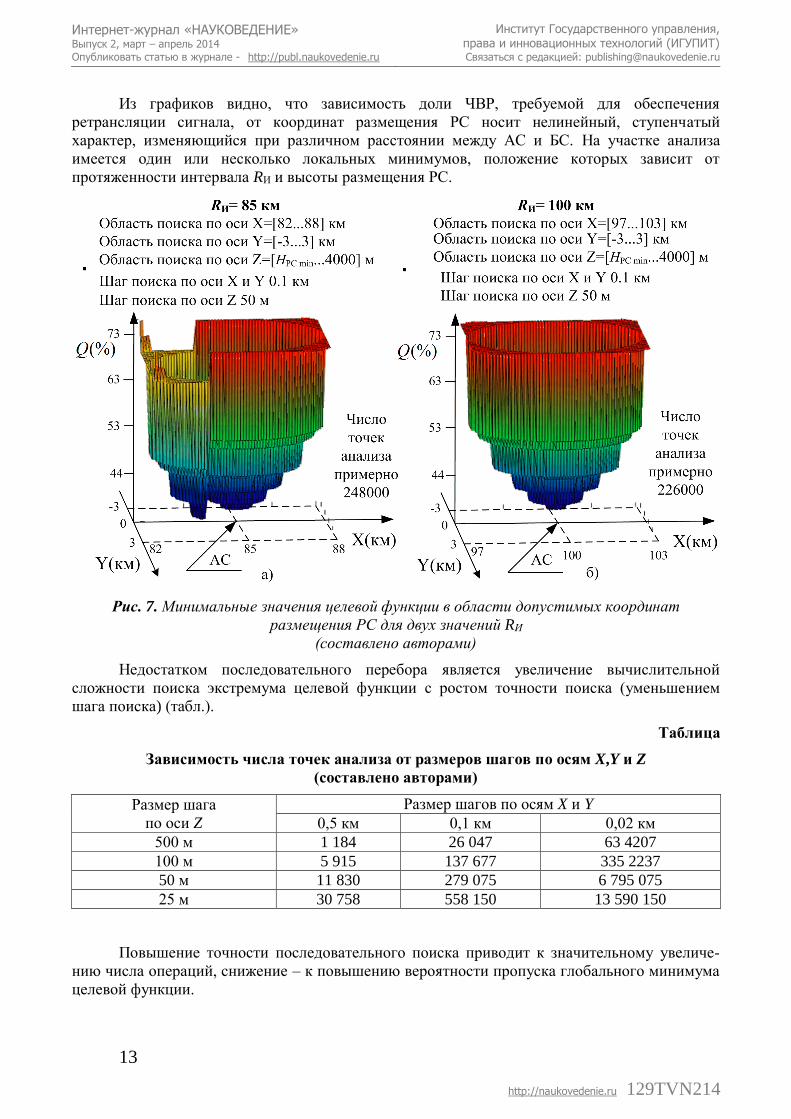
Из графиков видно, что зависимость доли ЧВР, требуемой для обеспечения
ретрансляции сигнала, от координат размещения РС носит нелинейный, ступенчатый
характер, изменяющийся при различном расстоянии между АС и БС. На участке анализа
имеется один или несколько локальных минимумов, положение которых зависит от
протяженности интервала RИ и высоты размещения РС.
Рис. 7. Минимальные значения целевой функции в области допустимых координат
размещения РС для двух значений RИ
(составлено авторами)
Недостатком последовательного перебора является увеличение вычислительной
сложности поиска экстремума целевой функции с ростом точности поиска (уменьшением
шага поиска) (табл.).
Таблица
Зависимость числа точек анализа от размеров шагов по осям X,Y и Z
(составлено авторами)
Размер шага по оси Z
Размер шагов по осям X и Y
0,5 км 0,1 км 0,02 км
500 м 1 184 26 047 63 4207
100 м 5 915 137 677 335 2237
50 м 11 830 279 075 6 795 075
25 м 30 758 558 150 13 590 150
Повышение точности последовательного поиска приводит к значительному увеличе-
нию числа операций, снижение – к повышению вероятности пропуска глобального минимума
целевой функции.

Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
14
http://naukovedenie.ru 129TVN214
Таким образом, требуется найти такой способ поиска экстремума целевой функции,
который при минимальной вычислительной сложности обеспечит гарантированное определе-
ние глобального минимума целевой функции (1).
5. Обоснование рационального способа поиска минимума целевой функции в
области допустимых значений координат размещения РС
Для уменьшения вычислительной сложности авторами предложено осуществить
сечение области допустимых координат размещения РС плоскостью, перпендикулярной
плоскости ХУ и проходящей через прямую, соединяющую точки размещения АС и БС [8]:
. (19)
На рисунке 8 показаны два локальных минимума (min 1 и min 2) целевой функции,
расположенные на прямой по выражению (19):
Рис. 8. Минимумы целевой функции на прямой, проходящей через точки размещения АС и БС
(составлено авторами)
Таким образом, определяются точки, принадлежащие рассекающей плоскости, в
которых целевая функция принимает минимальное значение, и соответствующие им
координаты x на прямой, проходящей через точки размещения АС и БС (рис. 9).
И АС
И БС АС
x R z H
R H H

Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
15
http://naukovedenie.ru 129TVN214
Рис. 9. Определение отрезка
(составлено авторами)
Из графиков видно, что на участке анализа имеется только один глобальный минимум
целевой функции. Ступенчатый характер изменения достижимого минимума целевой
функции позволяет определить отрезок с координатами , в пределах которого
значение целевой функции минимально.
Далее требуется определить координаты крайних (граничных) точек размещения РС на
БЛА в плоскости {X, Y}, в которых значение целевой функции минимальное. Эта задача схо-
жа с задачей построения минимальной выпуклой оболочки в вычислительной геометрии
[10, 11]. Существует ряд алгоритмов, позволяющих решить такую задачу: алгоритмы Грэхема,
Джарвиса, Мелькмана и др. Для их работы требуются заранее известные координаты всех то-
чек [10, 11]. В рассматриваемом случае как раз требуется определить координаты точек этой
выпуклой границы.
Предлагается в алгоритм Джарвиса, как наиболее подходящий для такой цели,
добавить проверку условия для соседней точки:
. (20)
В основе алгоритма Джарвиса лежит поиск точек минимальной выпуклой границы, ос-
нованный на последовательном поиске крайней точки при «обертывании» [12].
На первом шаге определяется стартовая точка, которая гарантированно входит в
минимальную выпуклую границу, берется, например, самая «левая» точка № 1 (рис. 10). На
втором шаге, при повороте вектора направления, определяется самая «правая» точка № 2
относительно точки № 1. Точка № 2 становится текущей и процесс повторяется. Работа
алгоритма завершается, когда текущей вновь окажется стартовая точка № 1.
Модифицируем алгоритм Джарвиса для решения задачи поиска минимальной выпук-
лой оболочки, когда координаты всех точек подмножества неизвестны.
min max,x x
min max,x x
min min
, , , zQ x y Q x x y y
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
16
http://naukovedenie.ru 129TVN214
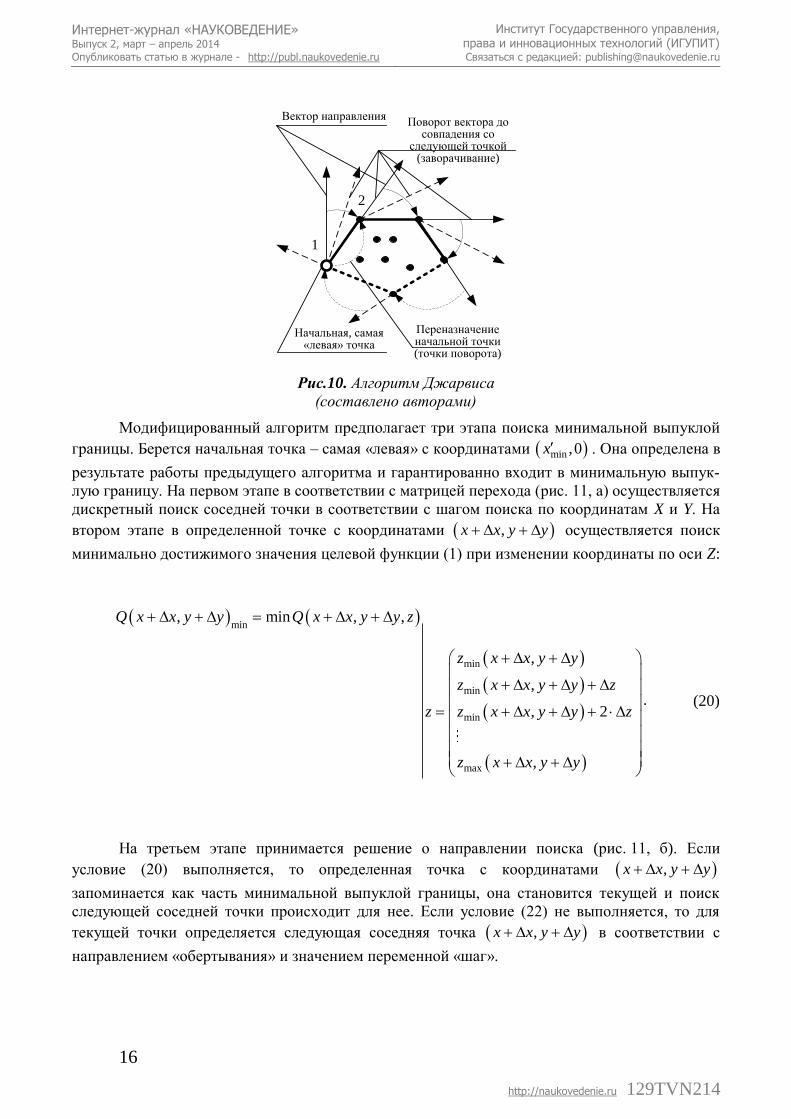
Рис.10. Алгоритм Джарвиса
(составлено авторами)
Модифицированный алгоритм предполагает три этапа поиска минимальной выпуклой
границы. Берется начальная точка – самая «левая» с координатами . Она определена в
результате работы предыдущего алгоритма и гарантированно входит в минимальную выпук-
лую границу. На первом этапе в соответствии с матрицей перехода (рис. 11, а) осуществляется
дискретный поиск соседней точки в соответствии с шагом поиска по координатам X и Y. На
втором этапе в определенной точке с координатами осуществляется поиск
минимально достижимого значения целевой функции (1) при изменении координаты по оси Z:
. (20)
На третьем этапе принимается решение о направлении поиска (рис. 11, б). Если
условие (20) выполняется, то определенная точка с координатами
запоминается как часть минимальной выпуклой границы, она становится текущей и поиск
следующей соседней точки происходит для нее. Если условие (22) не выполняется, то для
текущей точки определяется следующая соседняя точка в соответствии с
направлением «обертывания» и значением переменной «шаг».
Начальная, самая «левая» точка
Вектор направления Поворот вектора до
совпадения со следующей точкой
(заворачивание)
Переназначение начальной точки(точки поворота)
1
2
min ,0x
,x x y y
min
min
min
min
max
, min , ,
,
,
, 2
,
Q x x y y Q x x y y z
z x x y y
z x x y y z
z z x x y y z
z x x y y
,x x y y
,x x y y

Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
17
http://naukovedenie.ru 129TVN214
Рис. 11. Принцип модифицированного алгоритма Джарвиса
(составлено авторами)
На рисунке 12 представлены результаты работы алгоритма поиска границы области
допустимых значений координат РС в плоскости (Х,Y), а также показано (рис 12, а, б) влияние
величины шага поиска на точность определения границы области минимальных значений це-
левой функции при различных значениях протяженности интервала RИ.Таким образом, моди-
фицированный алгоритм Джарвиса позволяет находить множество рациональных точек
в плоскости (X,Y), в которых значение целевой функции минимально.
Рис. 12. Границы области допустимых значений координат РС в плоскости (Х,Y)
(составлено авторами)
На четвертом этапе работы алгоритма поиска координат размещения РС на БЛА на ос-
нове множества методом последовательного поиска определяется множество рацио-
нальных точек пространства , в которых значение целевой функции минимально.
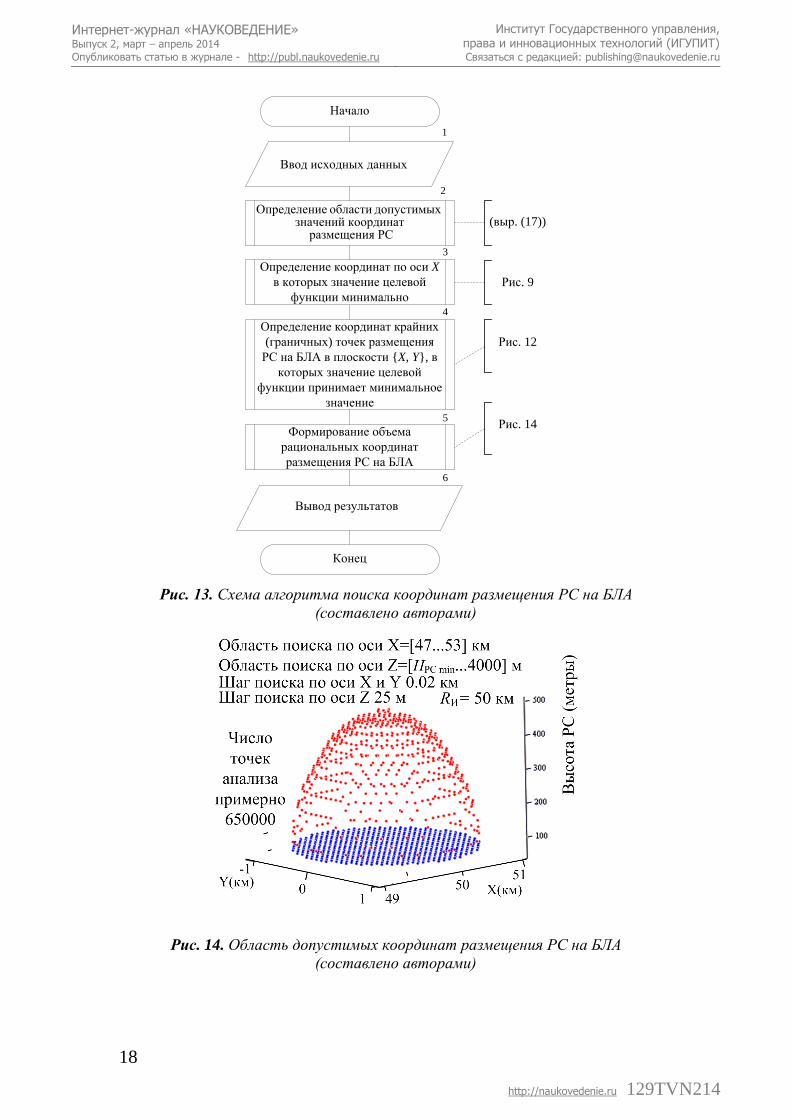
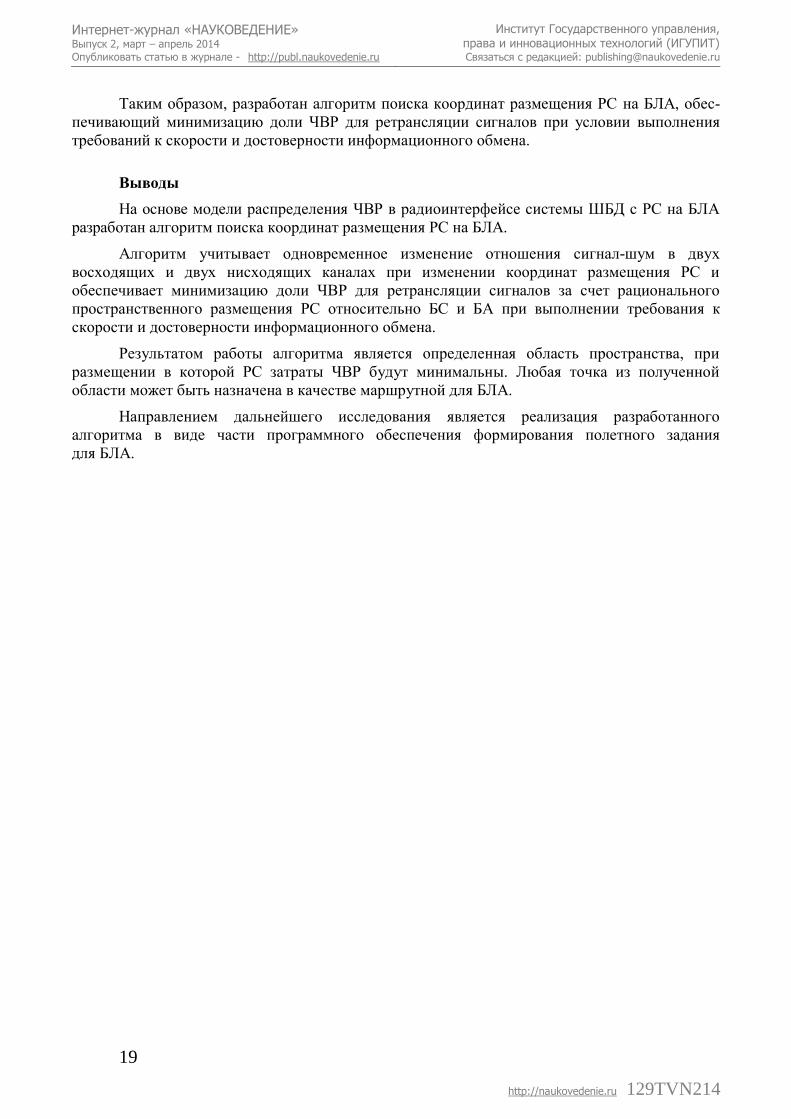
На рисунке 13 представлена схема алгоритма поиска координат размещения РС на
БЛА, а результаты его работы на рисунке 14. Координаты любых точек, заключенных в
полученном теле могут быть назначены маршрутными, при этом будет обеспечивается
минимум целевого показателя.
1
2
3
3-1=2
Условие не выполнено
Условие выполнено2-1=1
2
Переназначение начальной точки
Начальная точка
Окончание поиска
2
22-1=1
2-1=1
Δx
Δy
Матрица переходов
шаг Δx Δy
1 -1 0
2 0 -1
3 1 0
4 0 1
12
3
4x
y
Условие выполнено
Условие не выполнено
шаг=шаг+1
шаг=шаг-1 б) а)
рац
,x y
рац
,x y
рац
РС, ,x y z
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
18
http://naukovedenie.ru 129TVN214
Рис. 13. Схема алгоритма поиска координат размещения РС на БЛА
(составлено авторами)
Рис. 14. Область допустимых координат размещения РС на БЛА
(составлено авторами)
Начало
Определение области допустимых значений координат
размещения РС
Конец
Ввод исходных данных
Вывод результатов
Определение координат крайних
(граничных) точек размещения
РС на БЛА в плоскости {X, Y}, в
которых значение целевой
функции принимает минимальное
значение
Формирование объема
рациональных координат
размещения РС на БЛА
Определение координат по оси X
в которых значение целевой
функции минимально
(выр. (17))
Рис. 9
Рис. 12
Рис. 14
1
2
3
4
6
5
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
19
http://naukovedenie.ru 129TVN214
Таким образом, разработан алгоритм поиска координат размещения РС на БЛА, обес-
печивающий минимизацию доли ЧВР для ретрансляции сигналов при условии выполнения
требований к скорости и достоверности информационного обмена.
Выводы
На основе модели распределения ЧВР в радиоинтерфейсе системы ШБД с РС на БЛА
разработан алгоритм поиска координат размещения РС на БЛА.
Алгоритм учитывает одновременное изменение отношения сигнал-шум в двух
восходящих и двух нисходящих каналах при изменении координат размещения РС и
обеспечивает минимизацию доли ЧВР для ретрансляции сигналов за счет рационального
пространственного размещения РС относительно БС и БА при выполнении требования к
скорости и достоверности информационного обмена.
Результатом работы алгоритма является определенная область пространства, при
размещении в которой РС затраты ЧВР будут минимальны. Любая точка из полученной
области может быть назначена в качестве маршрутной для БЛА.
Направлением дальнейшего исследования является реализация разработанного
алгоритма в виде части программного обеспечения формирования полетного задания
для БЛА.
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
20
http://naukovedenie.ru 129TVN214
ЛИТЕРАТУРА
1. Вишневский, В. М. Энциклопедия WiMAX. Путь к 4G. Вишневский, В. М.,
Портной, С. Л., Шахнович, И. В. – М. : Техносфера, 2009. – 472 с.
2. Сюваткин, В. С. WiMAX – технология беспроводной связи: теоретические
основы, стандарты, применение. Сюваткин, В. С. Есипенко, В. И. – СПб. : БХВ-
Петербург, 2005. – 368 с.
3. Берлин, А. Н. Цифровые сотовые системы связи – М. : Эко-Трендз, 2007. –
296 с.
4. M.Okuda et al. Multihop Relay Extension for WiMAX Networks – Overview and
Benefits of IEEE 802.16j Standard/ – FUJITSU Sci. Tech. Journal, 44, 3, July 2008,
p.292–302.
5. IEEE 802.16j-2009, «IEEE Standard for Local and metropolitan areanetworks Part
16: Air Interface for Broadband Wireless Access Systems Amendment 1: Multiple
Relay Specification» Dec. 2009.
6. WiMAX Forum. WiMAX System Evaluation Methodology. – 2007. – 209 p.
7. ГОСТ Р 53363–2009. Цифровые радиорелейные линии. Показатели качества.
Методы расчета.
8. Выгодский, М. Я. Справочник по высшей математике. – М. : ACT: Астрель,
2006. – 991 с.
9. Гладких, Б.А. Методы оптимизации и исследование операций для бакалавров
информатики. Ч. II. Нелинейное и динамическое программирование : учебное
пособие. – Томск : Изд-во НТЛ, 2011. – 264 с.
10. Томас, Х. Алгоритмы: построение и анализ / Томас, Х. Кормен, Чарльз И.
Лейзерсон, Рональд Л. Ривест, Клиффорд Штайн. 3-е издание. – М. : «Вильямс»,
2013. – 1328 с.
11. Половинкин, Е. С. Элементы выпуклого и сильно выпуклого анализа.
Половинкин, Е.С, Балашов, М.В. – М.: Физматлит, 2004. – 416 с.
12. Левитин, А. В. Алгоритмы: введение в разработку и анализ. – М.: «Вильямс»,
2006. – 576 с.
Рецензент: Алёшин Михаил Геннадьевич, сотрудник, кандидат технических наук,
ГКОУ ВПО Академия Федеральной службы охраны Российской Федерации (Академия ФСО
России).
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
21
http://naukovedenie.ru 129TVN214
Sergej Djakonov The Academy of Federal Security Guard Service of the Russian Federation
Russia, Orel
E-Mail: [email protected]
Aleksandr Sivov The Academy of Federal Security Guard Service of the Russian Federation
Russia, Orel
E-Mail: [email protected]
The algorithm of search of placement coordinates of unmanned
aerial vehicle with relay station, providing minimization of
part of frequency-time resource for signal retransmission
Abstract: In this article authors continue researches represented in the article “The model of
frequency-time resource allocation in the air interface of broadband wireless access system with re-
lay station on unmanned aerial vehicle”. The model described in previous article allows defining
minimal frequency-time resource for data transfer over relay station on unmanned aerial vehicle. The
location coordinates of base station; subscriber station and unmanned aerial vehicle with relay station
are input parameters of developed model. As result of researches the output parameter is nonlinear
and step function with several extremes, also it depends from distance between base station and sub-
scriber station.
Optimal location of unmanned aerial vehicle allows minimizing frequency-time resource for
retransmission. Thus the search of coordinates of location of unmanned aerial vehicle with relay
station is actual task. Authors offer to use search optimization methods. The modified Jarvis
algorithm was proposed by authors to reduce computational complexity. The changing of signal-to-
noise ratio in both uplink and downlink channels is considered in algorithm of search of location
coordinates of unmanned aerial vehicle with relay station.
Keywords: Вroadband wireless access system; relay station; unmanned aerial vehicle; opti-
mization of the topological structure of the network; allocation of frequency-time resource.
Identification number of article 129TVN214
Интернет-журнал «НАУКОВЕДЕНИЕ» Выпуск 2, март – апрель 2014
Опубликовать статью в журнале - http://publ.naukovedenie.ru
Институт Государственного управления, права и инновационных технологий (ИГУПИТ) Связаться с редакцией: [email protected]
22
http://naukovedenie.ru 129TVN214
REFERENCES
1. Vishnevskij, V. M. Jenciklopedija WiMAX. Put' k 4G. Vishnevskij, V. M., Portnoj, S.
L., Shahnovich, I. V. – M. : Tehnosfera, 2009. – 472 s.
2. Sjuvatkin, V. S. WiMAX – tehnologija besprovodnoj svjazi: teoreticheskie osnovy,
standarty, primenenie. Sjuvatkin, V. S. Esipenko, V. I. – SPb. : BHV-Peterburg, 2005.
– 368 s.
3. Berlin, A. N. Cifrovye sotovye sistemy svjazi – M. : Jeko-Trendz, 2007. – 296 s.
4. M.Okuda et al. Multihop Relay Extension for WiMAX Networks – Overview and
Benefits of IEEE 802.16j Standard/ – FUJITSU Sci. Tech. Journal, 44, 3, July 2008,
p.292–302.
5. IEEE 802.16j-2009, «IEEE Standard for Local and metropolitan areanetworks Part
16: Air Interface for Broadband Wireless Access Systems Amendment 1: Multiple
Relay Specification» Dec. 2009.
6. WiMAX Forum. WiMAX System Evaluation Methodology. – 2007. – 209 p.
7. GOST R 53363–2009. Cifrovye radiorelejnye linii. Pokazateli kachestva. Metody
rascheta.
8. Vygodskij, M. Ja. Spravochnik po vysshej matematike. – M. : ACT: Astrel', 2006. –
991 s.
9. Gladkih, B.A. Metody optimizacii i issledovanie operacij dlja bakalavrov informatiki.
Ch. II. Nelinejnoe i dinamicheskoe programmirovanie : uchebnoe posobie. – Tomsk :
Izd-vo NTL, 2011. – 264 s.
10. Tomas, H. Algoritmy: postroenie i analiz / Tomas, H. Kormen, Charl'z I. Lejzerson,
Ronal'd L. Rivest, Klifford Shtajn. 3-e izdanie. – M. : «Vil'jams», 2013. – 1328 s.
11. Polovinkin, E. S. Jelementy vypuklogo i sil'no vypuklogo analiza. Polovinkin, E.S,
Balashov, M.V. – M.: Fizmatlit, 2004. – 416 s.
12. Levitin, A. V. Algoritmy: vvedenie v razrabotku i analiz. – M.: «Vil'jams», 2006. –
576 s
Related Documents











