Aimée Vargas, Jyh-Ming Lien, Marco Morales and Nancy M. Amato Algorithms & Applications Group Parasol Lab, Dept. of Computer Science, Texas A&M University VIZMO++ A Visualization, Authoring, and Educational Tool for Motion Planning

Aimée Vargas, Jyh-Ming Lien, Marco Morales and Nancy M. Amato Algorithms & Applications Group Parasol Lab, Dept. of Computer Science, Texas A&M University.
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Aimée Vargas, Jyh-Ming Lien, Marco Morales and Nancy M. Amato
Algorithms & Applications Group
Parasol Lab, Dept. of Computer Science,
Texas A&M University
VIZMO++
A Visualization, Authoring, and Educational Tool for Motion
Planning
• Motion Planning consists of finding feasible motions for
movable objects• Many applications: robotics, computer graphics, scientific
computing, …• Input
− Data describing the robot’s shape, articulations, constraints− Data describing the shape and configuration of obstacles − The robot’s start and goal configurations
• Planning Algorithm (e.g., sampling-based motion planning)− Samples configurations randomly in the Configuration Space (C-Space)− Connects each sample to one or multiple near-by samples
• Output− A graph describing the feasible motions− A sequence of configurations that take the robot from the start to the goal
Algorithmic Motion Planning
workspace
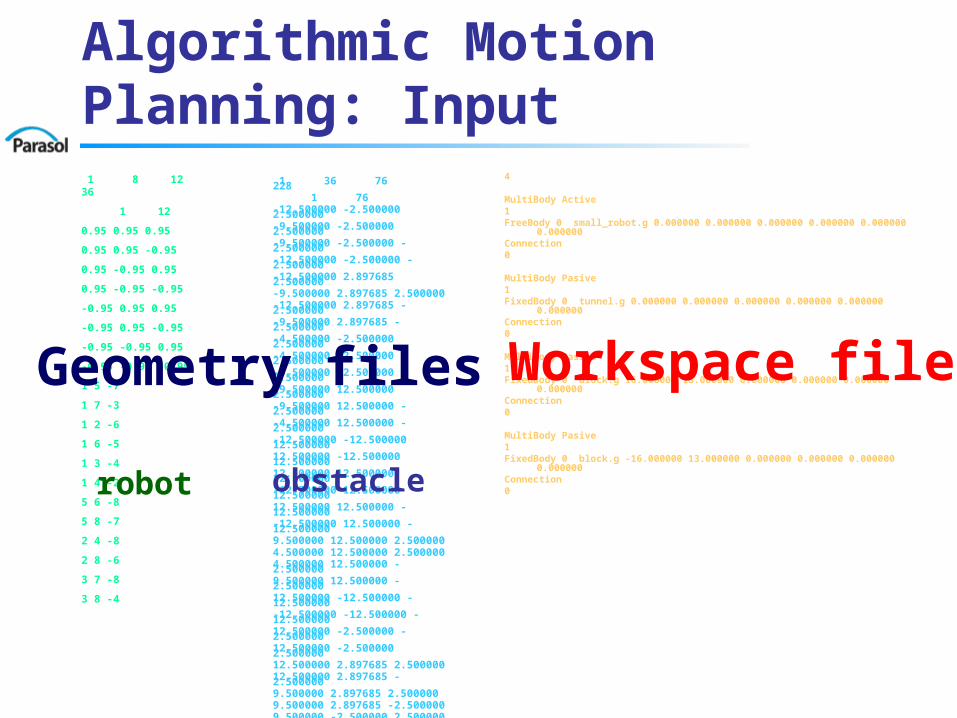
Algorithmic Motion Planning: Input
4
MultiBody Active1FreeBody 0 small_robot.g 0.000000 0.000000 0.000000 0.000000 0.000000 0.000000Connection0
MultiBody Pasive1FixedBody 0 tunnel.g 0.000000 0.000000 0.000000 0.000000 0.000000 0.000000Connection0
MultiBody Pasive1FixedBody 0 block.g 16.000000 13.000000 0.000000 0.000000 0.000000 0.000000Connection0
MultiBody Pasive1FixedBody 0 block.g -16.000000 13.000000 0.000000 0.000000 0.000000 0.000000Connection0
1 36 76 228 1 76-12.500000 -2.500000 2.500000-9.500000 -2.500000 2.500000-9.500000 -2.500000 -2.500000-12.500000 -2.500000 -2.500000-12.500000 2.897685 2.500000-9.500000 2.897685 2.500000-12.500000 2.897685 -2.500000-9.500000 2.897685 -2.500000-4.500000 -2.500000 2.500000-4.500000 -2.500000 -2.500000-4.500000 12.500000 2.500000-9.500000 12.500000 2.500000-9.500000 12.500000 -2.500000-4.500000 12.500000 -2.500000-12.500000 -12.500000 12.50000012.500000 -12.500000 12.50000012.500000 12.500000 12.500000-12.500000 12.500000 12.50000012.500000 12.500000 -12.500000-12.500000 12.500000 -12.5000009.500000 12.500000 2.5000004.500000 12.500000 2.5000004.500000 12.500000 -2.5000009.500000 12.500000 -2.50000012.500000 -12.500000 -12.500000-12.500000 -12.500000 -12.50000012.500000 -2.500000 -2.50000012.500000 -2.500000 2.50000012.500000 2.897685 2.50000012.500000 2.897685 -2.5000009.500000 2.897685 2.5000009.500000 2.897685 -2.5000009.500000 -2.500000 2.5000009.500000 -2.500000 -2.5000004.500000 -2.500000 2.5000004.500000 -2.500000 -2.5000001 2 -4 2 3 -4 5 6 -1 6 2 -1 7 8 -5 …
Workspace file
1 8 12 36
1 12
0.95 0.95 0.95
0.95 0.95 -0.95
0.95 -0.95 0.95
0.95 -0.95 -0.95
-0.95 0.95 0.95
-0.95 0.95 -0.95
-0.95 -0.95 0.95
-0.95 -0.95 -0.95
1 5 -7
1 7 -3
1 2 -6
1 6 -5
1 3 -4
1 4 -2
5 6 -8
5 8 -7
2 4 -8
2 8 -6
3 7 -8
3 8 -4
robot obstacle
Geometry files

Algorithmic Motion Planning: Output
Roadmap Version Number 061300#####PREAMBLESTART##### ../obprm -cd RAPID -f serial -bbox [0.0,4.0,0.0,4.0,-5.0,14.0] -bbox_scale 1 -lp straightline rotate_at_s -gNodes OBPRM nodes 400 collPair rT rT shells 1 freePair rT rT -cNodes closest 20 components 5 5 #####PREAMBLESTOP##########ENVFILESTART#####serial.env#####ENVFILESTOP##########LPSTART#####straightline rotate_at_s 0.5a_star_distance 6 9#####LPSTOP##########CDSTART#####3vclip RAPID PQP #####CDSTOP##########DMSTART#####5scaledEuclidean 0.9euclidean minkowski 3 3 0.3333manhattan com #####DMSTOP##########GRAPHSTART#####89 78 890 1.95659 2.51507 -4.62012 0.763875 0.92729 0.307945 0.984243 0.0868963 0.304818 1 -1 -1 2 4 1 122 3 126 1 2.87237 0.864196 -4.5569 0.675137 0.382797 0.266389 0.581803 0.195711 0.873085 1 -1 -1 1 8 1 133 2 2.9388 3.5578 -4.30382 0.115513 0.0309897 0.993182 0.688779 0.297365 0.0481244 1 -1 -1 1 12 1 223 3 3.00148 0.25514 -4.59405 0.0368278 0.900472 0.244192 0.909281 0.937958 0.433103 1 -1 -1 1 0 1 126 4 3.00187 0.345139 -4.55145 0.374121 0.167178 0.795772 0.606054 0.804405 0.825447 1 -1 -1 2 7 1 32 0 1 122 5 0.940853 0.879135 -4.65633 0.334515 0.538076 0.575211 0.163215 0.918796 0.106324 1 -1 -1 2 9 1 230 14 1 260 6 1.4835 3.37686 -4.45324 0.161255 0.324899 0.0697619 0.261815 0.247689 0.382626 1 -1 -1 1 24 1 227 7 2.82442 0.927611 -4.5542 0.226048 0.822072 0.33608 0.898007 0.667324 0.289052 1 -1 -1 3 4 1 32 9 1 219 24 1
251 8 0.34911 1.50508 -4.16536 0.994804 0.295583 0.435455 0.627437 0.361991 0.973598 1 -1 -1 4 1 1 133 13 1 202 24
1 202 23 1 237 9 2.20836 0.059729 -0.339691 0.215222 0.247623 0.330884 0.157593 0.796295 0.400327 2 -1 -1 2 7 1 219 5 1 230
......
#####GRAPHSTOP#####
VIZMO_PATH_FILE Path Version 20001125
1
1443
20.000000 0.000000 0.000000 0.000000 0.000000 0.000000
19.910263 0.013349 0.017175 0.994866 0.992220 0.996640
19.820526 0.026698 0.034349 0.989732 0.984439 0.993280
19.730789 0.040048 0.051524 0.984598 0.976659 0.989919
19.641052 0.053397 0.068699 0.979464 0.968878 0.986559
19.551315 0.066746 0.085873 0.974331 0.961098 0.983199
19.461578 0.080095 0.103048 0.969197 0.953318 0.979839
19.371841 0.093445 0.120222 0.964063 0.945537 0.976478
19.282104 0.106794 0.137397 0.958929 0.937757 0.973118
19.192367 0.120143 0.154572 0.953795 0.929976 0.969758
19.102630 0.133492 0.171746 0.948661 0.922196 0.966398
19.012893 0.146842 0.188921 0.943527 0.914416 0.963038
18.923157 0.160191 0.206096 0.938393 0.906635 0.959677
18.833420 0.173540 0.223270 0.933259 0.898855 0.956317
18.743683 0.186889 0.240445 0.928126 0.891075 0.952957
18.653946 0.200239 0.257619 0.922992 0.883294 0.949597
18.564209 0.213588 0.274794 0.917858 0.875514 0.946237
18.474472 0.226937 0.291969 0.912724 0.867733 0.942876
18.384735 0.240286 0.309143 0.907590 0.859953 0.939516
18.294998 0.253636 0.326318 0.902456 0.852173 0.936156
18.205261 0.266985 0.343493 0.897322 0.844392 0.932796
18.115524 0.280334 0.360667 0.892188 0.836612 0.929435
18.025787 0.293683 0.377842 0.887054 0.828831 0.926075
17.936050 0.307033 0.395017 0.881920 0.821051 0.922715
17.846313 0.320382 0.412191 0.876787 0.813271 0.919355
…
Path file Roadmap (graph) file
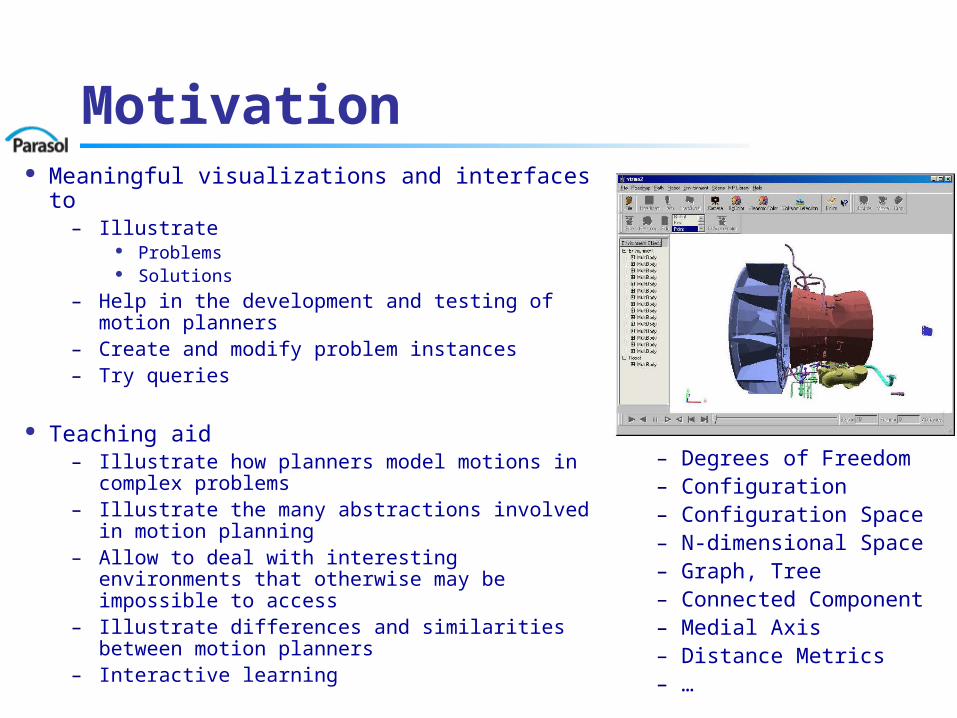
Motivation Meaningful visualizations and interfaces to
– Illustrate Problems Solutions
– Help in the development and testing of motion planners
– Create and modify problem instances– Try queries
Teaching aid– Illustrate how planners model motions in complex
problems– Illustrate the many abstractions involved in motion
planning– Allow to deal with interesting environments that
otherwise may be impossible to access– Illustrate differences and similarities between motion
planners– Interactive learning
– Degrees of Freedom– Configuration– Configuration Space– N-dimensional Space– Graph, Tree– Connected Component– Medial Axis– Distance Metrics– …

VIZMO++
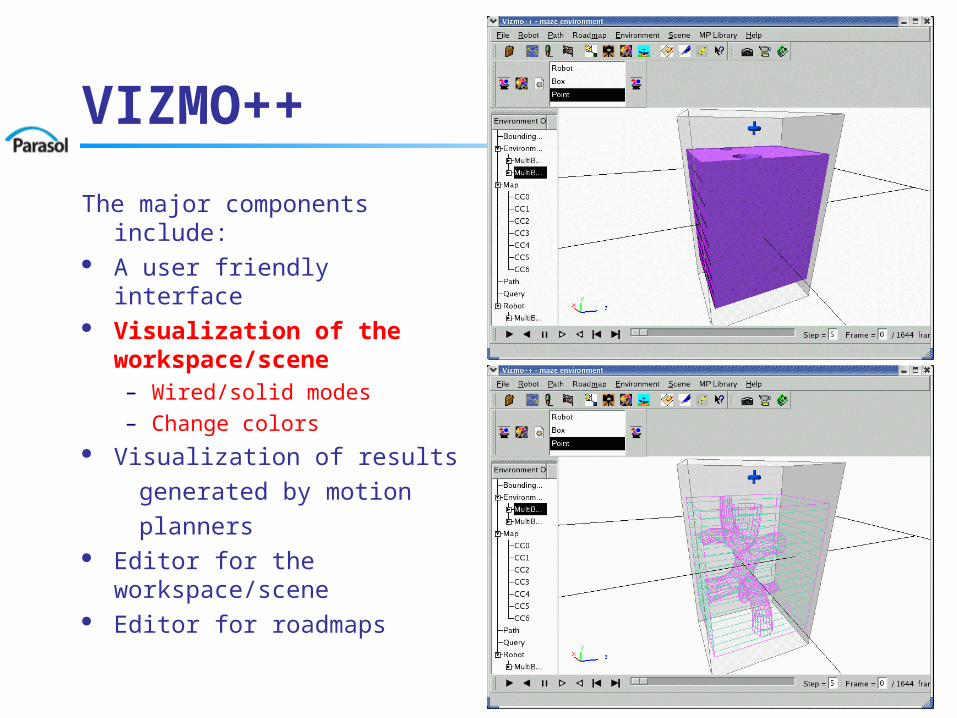
The major components include: A user friendly interface
– C++, OpenGL and Qt 4 Visualization of the
workspace/scene Visualization of results
generated by motion
planners Editor for the
workspace/scene Editor for roadmaps
VIZMO++
The major components include: A user friendly interface Visualization of the
workspace/scene– Wired/solid modes
– Change colors Visualization of results
generated by motion
planners Editor for the
workspace/scene Editor for roadmaps
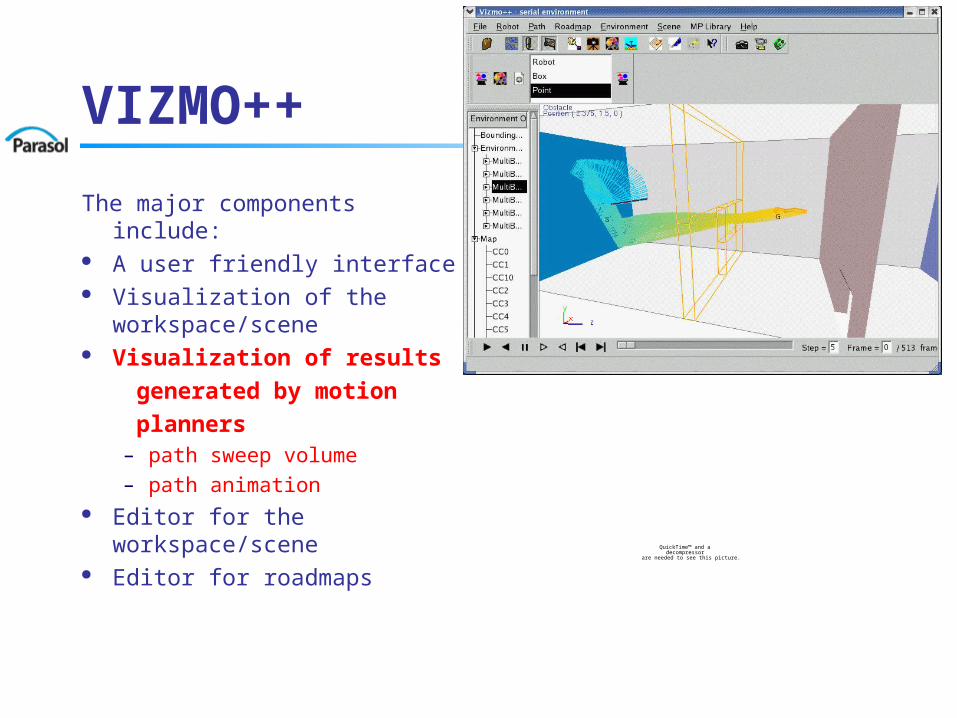
VIZMO++
The major components include: A user friendly interface Visualization of the
workspace/scene Visualization of results
generated by motion
planners– path sweep volume
– path animation Editor for the
workspace/scene Editor for roadmaps
QuickTime™ and a decompressor
are needed to see this picture.

VIZMO++
The major components include: A user friendly interface Visualization of the
workspace/scene Visualization of results
generated by motion
planners– debugging
– compare different methods Editor for the
workspace/scene Editor for roadmaps
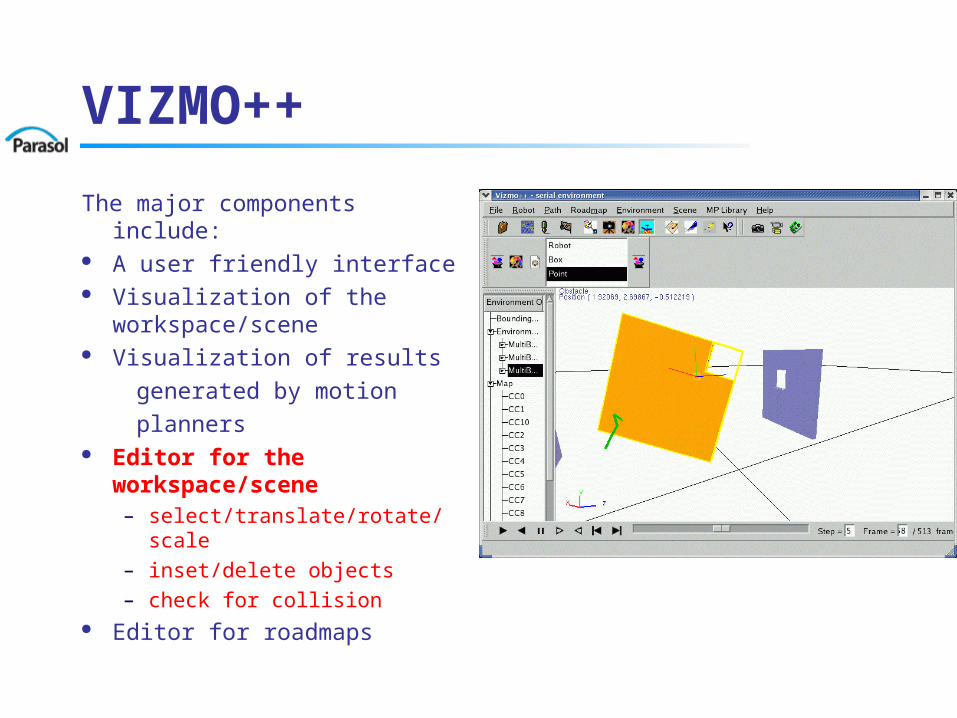
VIZMO++
The major components include: A user friendly interface Visualization of the
workspace/scene Visualization of results
generated by motion
planners Editor for the
workspace/scene– select/translate/rotate/scale
– inset/delete objects
– check for collision Editor for roadmaps
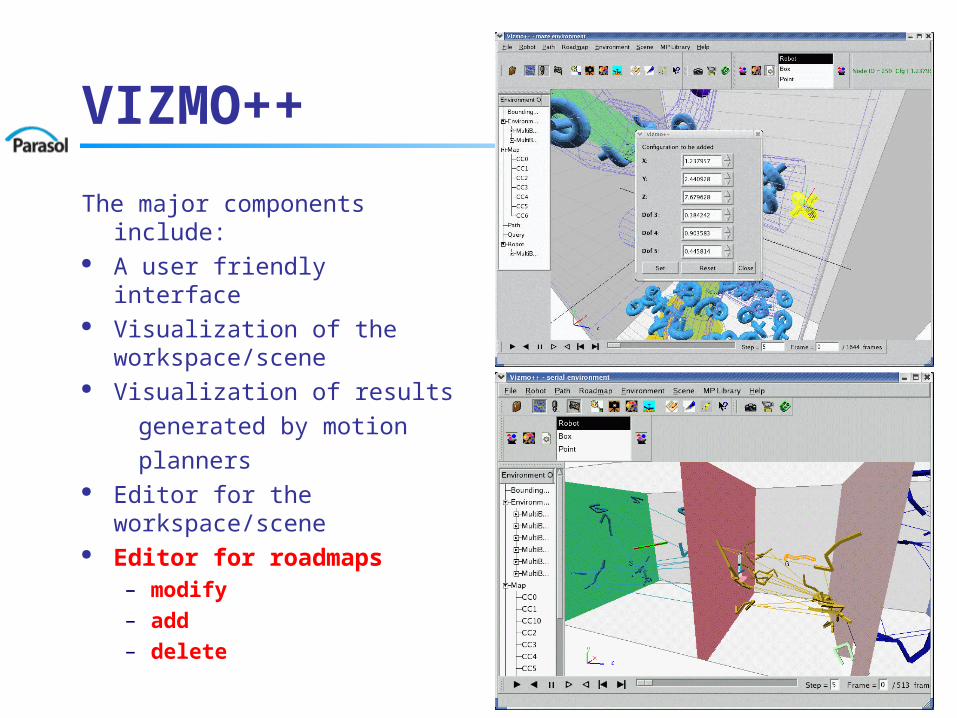
VIZMO++
The major components include: A user friendly interface Visualization of the
workspace/scene Visualization of results
generated by motion
planners Editor for the
workspace/scene Editor for roadmaps
– modify
– add
– delete
Demo
Conclusion
VIZMO++ is a 3D tool for visualizing and editing motion planning
– Environments and Problem Instances– Solutions
Future work includes– allow users to construct articulated robots– support multiple robots– support Constructive Solid Geometry (CSG)– Configuration-space visualization (2D-3D projections)– release the code

Aimée Vargas, Jyh-Ming Lien, Marco Morales and Nancy M. Amato
Algorithms & Applications Group
Parasol Lab, Dept. of Computer Science,
Texas A&M University
VIZMO++http://parasol.tamu.edu/groups/amatogroup/research/vizmo++/
Related Documents











