Aerial Surveillance Drone Design Review Tuesday, March 12, 2013 Colin Donahue Samantha Kenyon Jason Lowden Benjamin Wheeler

Aerial Surveillance Drone Design Review Tuesday, March 12, 2013 Colin Donahue Samantha Kenyon Jason Lowden Benjamin Wheeler.
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Aerial Surveillance Drone
Design ReviewTuesday, March 12, 2013
Colin DonahueSamantha Kenyon
Jason LowdenBenjamin Wheeler
Overview
• Customer Needs
• Engineering Specifications
• Concept Selection
• Design
• Risks
• Testing
• Bill of Materials
Customer Needs
• Easily Portable — Must be able to transport easily to allow for flying in new areas.
• Low Weight — Cannot be too heavy in order to allow for easy transport.
• Low Cost — Since this system is for personal use and security it must be reasonable price for the average person.

Customer Needs
• Easy to Use — It must be easy to use and control for an average person with any range of expertise.
• Safe operation — It must operate safely without any chance of harm to the user or other bystanders.

Customer Needs
• Accurate Control — It must move accurately based on the controls given by the user and therefore allow the user full control over the device.
• Intuitive Feedback — It must provide some sort of feedback to the user to be used to monitor the environment for personal security.

Customer Needs
• Ability to Function Outdoors — It must be able to fly in different weather conditions where the wind speed is below 10 miles per hour and there is little to no precipitation.
• Enough Power to Sustain Flight — It must be able to remain in flight for a significant period of time.

Customer Needs
• Enough Power to Sustain Flight - It must be able to remain in flight for a significant period of time.
• Area of interest - The system must remain in a certain area to prevent loss.
• Easy to Maintain - It must be easy to fix and maintain to increase lifespan.

Engineering Specifications
• The total weight of the system will not exceed 5 pounds.
• The system will not leave a specified area of interest.
• The cost of the system shall not exceed $500.
• The system will be constructed with components that can function properly in temperatures ranging from 0°C to 40°C.

Engineering Specifications
• The electronic components of the system will be enclosed in order to prevent damage from light precipitation.
• The system will be controlled by a portable device with switch-like controls for power and data transmission settings.
• The system will operate on full charge for at least 8 minutes.
Engineering Specifications
• The system will detect potential threats from a distance of between 3 and 20 feet.
• The system will not exceed 2 feet in width or length.

Concept Selection: Quadrotor
• Options areo Fixed-Wingo Helicoptero Quadrotor

Design: Quadrotor System

Design: Communication
• Design Conceptso ARDroneLibo Android Freeflight 2o AT Commands
• Selected Concepto AT Commands
Few dependencies on other features High learning curve, but more control
over data stream

Design: AT Commands
• Data Portso 5554 - UDP - Navigation Datao 5555 - UDP - Video Streamo 5556 - UDP - Control Signals
• Example AT Commandso Sent over UDP port for control datao Takeoff: AT*REF="3,290718208"o Land: AT*REF="3,290717696"

Design: Internet Communication
• Wi-Fi adapter is required for quadrotor controlo Cannot have real-time access to the Internet
at the same time
• Android devices all Bluetooth communicationo Sending images to base station over
Bluetootho Base station will transmit to Internet
websites
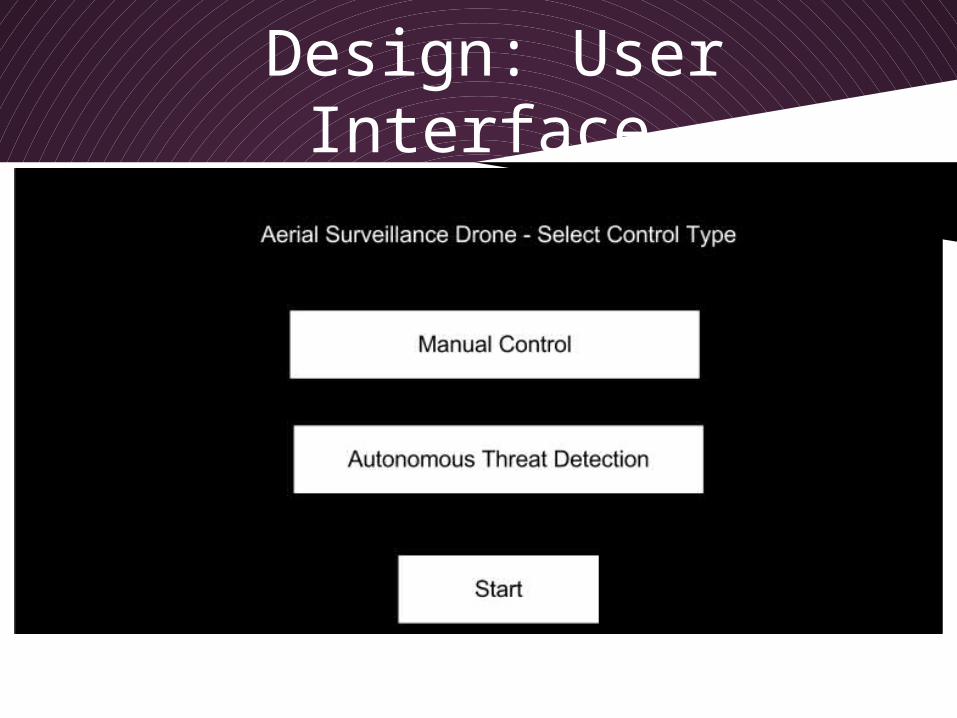
Design: User Interface

Design: User Interface

Design: User Interface
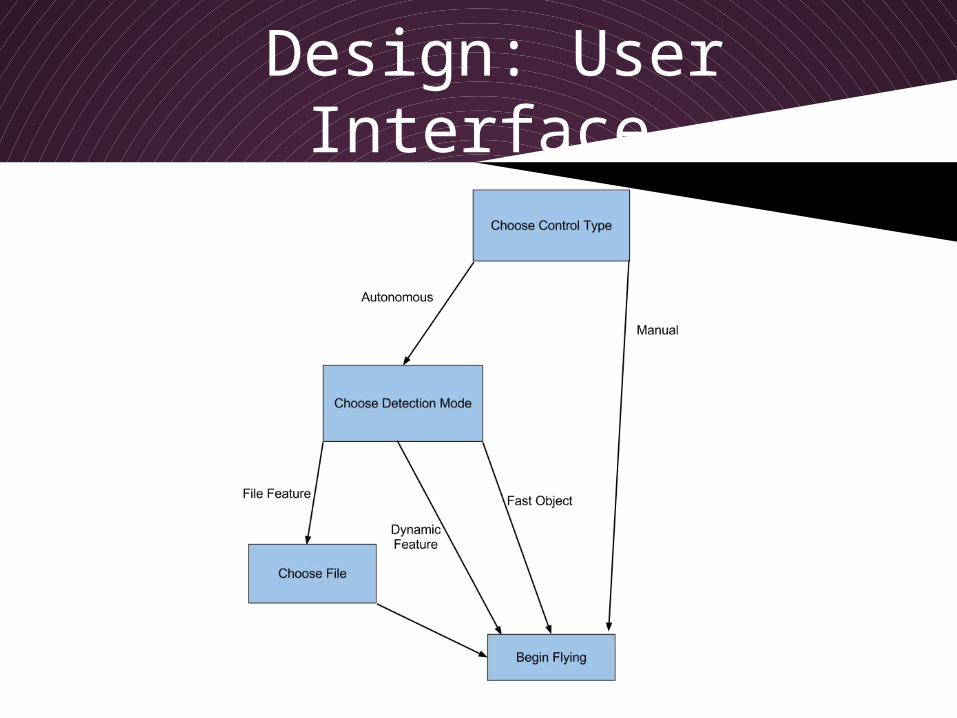
Design: User Interface

Design: Threat Detection

Design: Threat Detection
• Edge Detectiono points where image brightness changes sharply
• Corner Detectiono intersection of edges
• Blob Detectiono regions where the image is differento a blob is a region of the image where properties
are either the same or vary in a defined way
• Speeded Up Robust Features (SURF)o relies on integral approximations and the Hessian
blob detectoro uses a Haar wavelet for features

• File Feature Detectiono used when the user knows what the threat iso searches in a video frame for matching points
with an image fileo discards points with low confidence or far
away from the main cluster
Design: Threat Detection
Design: Threat Detection
• Dynamic Feature Detectiono used when the user knows a threat when
he/she sees ito tapping the screen on an object will register
it as a threato uses blob detection to focus on the threat and
not lose it as it moveso poorly defined blobs will be ignored
Design: Threat Detection
• Fast Object Detectiono uses blob detection to find blobs in an imageo the rudimentary blob detection available in
OpenCV is not able to distinguish blobs wello multiple nearby blobs will be considered part
of the same blobo a variety of clustering algorithms will be
tested to determine which one has the best performance
o the movement of blobs will be tracked and fast moving ones will be classified as threats
Risks
• Target identificationo Identifying incorrect targets will cause the
system to track the wrong targets. Not being able to identify targets makes the system largely useless from an autonomous standpoint.
o When the system is unable to recognize the correct target a user will be able to switch the system to manual control.

Risks
• Running out of batteryo If the system runs out of battery while in
flight its fall could damage the payload and motors.
o The system will have padding underneath it so that if it falls straight down nothing on the main chassis of the system will be damaged. The battery level will also to monitor to ensure the user can take action if the charge level is low.

Risks
• Keeping the system in a constrained areao When in autonomous flight mode the system
is able to go wherever its programming allows which may not always correspond to a safe location.
o The system will be able to switch to manual control mode at any time so the user can stop it from going too far away. A kill switch will also be implemented so that the system can be stopped at any time.

Risks
• Interaction with surroundingso In order to autonomously detect threats, the
Aerial Surveillance Drone needs to be aware of its surroundings so that it can land properly and avoid obstacles in its path.
o The bottom of the system has ultrasonic range sensors so it can do controlled landings based on its altitude. If the system hits an obstacle and it reaches an unsafe tilt level then it will immediately turn off its rotors.
Risks
• Loss of communicationo If communication with the system is lost it
has to know how to navigate by itself.o The system will attempt to hover in the same
location.

Testing
• User interfaceo Ben and Jasono Components
Configuration screens Camera feed Sensor/status info Manual control Switching between control modes

Testing
• Target identificationo Colin and Samo Components
File feature detection High speed detection Dynamic feature detection Tracking objects in motion Tracking on low performance devices

Testing
• Communicationo Jason and Beno Components
Between desktop and mobile applications Send meaningful data to desktop
application Dynamic feature detection Camera feed to mobile application Sensor data to mobile application Desktop application to social media

Bill of Materials
Component Cost Our Cost Availability
ARDrone Quadrotor $299.00 $0.00 Immediate
Android Tablet $199.00 $0.00 Immediate
Total $498.00 $0.00

Questions?
Related Documents











