
Advancement in Swarm Robotics
Jul 15, 2016
Swarm robotics has been an emerging field in which multiple robots work simultaneously to perform a task just like a swarm of birds or an ant colony. The presentation gives a brief introduction to what swarm robotics is and the advancement taking place in this field.
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript


1. Introduction2. Features of swarm robotics3. Fault detection and recovery4. Entity projects and simulations5. Conclusion6. References

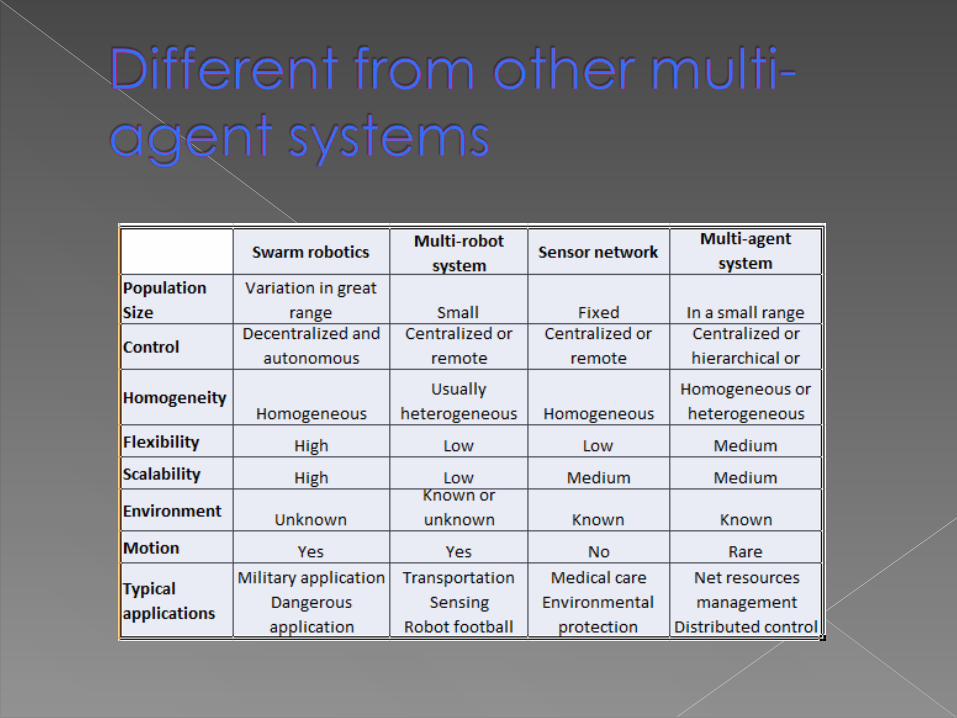
A new approach to the coordination of multi-robot systems
Inspired from nature (social insect, fishes) Desired collective behaviour occurs from
interaction between robots and interaction between robots and environment
A whole swarm of simple individuals have ability to solve complex problems


A single robot must be designed with complicated structure and control modules
High cost of design, construction and maintenance
A small broken part may effect the whole system

i. Parallelii. Scalableiii. Stableiv. Economical

Robots in the swarm should have some basic functions, such as sensing, communicating, motioning
The model is divided into three modules› Information exchange,› Basic behavior › Advanced behavior
The main functions of individuals involved in this module are limited sensing and local communication
Information exchange of a robot falls into two categories› interaction with robot› interaction with environment.
Direct communication
Communication through environment
Sensing

A robotic swarm needs to maintain continuous operation even in the event of failure of one or more individual robots
Transmission of position data between robots is the main method of fault location
Transmission of data permits members of a robotic swarm to identify and subsequently isolate a faulty robot

The controller of robot A receives the sensors, position coordinates and motors values from robot B.
The controller of robot A computes the signal direction and the distance between A and B based on the coordination data and the signal strength from the communication module in robot A.

Controller of robot A broadcasts its sensors, position coordinates and motors values along with the computed data, combined with robot B’s identification, to the nearest robot within the communication range.
When robot B receives these information ,it starts to diagnose the values and computes the signal direction and the distance between A and B based on the coordination data and the signal strength from the communication module in robot B.

Both robots, A and B, have a copy of each other controller in addition to the computed values from each other.
If none of these values match, then both robot A and B broadcast a suspicious report on each other.
At this stage (suspiciousness), robot A and B need to follow the same procedure to check with another robot (in this case is robot C) if the suspicion still exists.

The faulty robot will be determined whenever the healthy robot (i.e. robot C) confirms whether robot A or B has the fault.
The faulty robot will be reported to the entire swarm of robots. This will allow the swarm to take an action toward recovering/mitigating the faulty robot.



Eye –bot
Hand-bot
Foot-bot
Player project is a robot server that provides full access and control of robotic platform, sensors and actuators for researchers
Stage is a scalable simulator that is interfaced to Player and can simulate a population of 1000 mobile robots in a 2D bitmapped environment in parallel.

Swarm robots is an emerging field which has taken inspiration from nature swarm
It is gaining popularity for application such Search and Rescue for areas which are inaccessible or dangerous to humans

[1] Ying TAN, Zhong-yang. Research Advance in Swarm Robotics
[2] Nadia Nedjah, Rafael Mathias de Mendonca, Luiza de Macedo Mourelle. PSO-based Distributed Algorithm for Dynamic Task Allocation in a Robotic Swarm
[3] Nor Azlina Ab Aziz, Zuwairie Ibrahim. Asynchronous Particle Swarm Optimization for Swarm Robotics
[4] Micael S. Couceiro, Patricia A. Vargas, Rui P.Rocha, Nuno M.F.Ferreira. Benchmark of swarm robotics distributed techniques in a search task
[5] HuiKeng Lau, Iain Bate, Paul Cairns, Jon Ttimmis. Adaptive data-driven error detection in swarm robotics with statistical classifiers
[6] Clare Ddixon, Alan F.T.Winfield, Michael Fisher, Chengxiu zeng. Towards temporal verification pf swarm robotic systems

[7] Masao Kubo, Hiroshi Sato, Tatsuro Yoshimura, Akihiro Yamaguchi, Ttakahiro Tanaka. Multiple targets enclosure by robotic swarm
[8] Wenguo Liu, Aalan F.T.Winfield. Open hardware e-puck Linux extension board for exponential swarm robotics research
[9] Alan Oliveira, Nadia Nedjah, Luiza de Macedo Mourelle. Distributed efficient localization in swarm robotic systems using swarm intelligence algorithms
[10] Adil Khadidos, Richard M. Crowder, Paul H. Chappell. Exogenous Fault Detection and Recovery for Swarm Robotics

Related Documents











