Advanced approaches to hot-mix asphalt dynamic modulus prediction Halil Ceylan, Kasthurirangan Gopalakrishnan, and Sunghwan Kim Abstract: The dynamic modulus (|E*|) is one of the primary hot-mix asphalt (HMA) material property inputs at all three hierarchical levels in the new Mechanistic–empirical pavement design guide (MEPDG). The existing |E*| prediction mod- els were developed mainly from regression analysis of an |E*| database obtained from laboratory testing over many years and, in general, lack the necessary accuracy for making reliable predictions. This paper describes the development of a simplified HMA |E*| prediction model employing artificial neural network (ANN) methodology. The intelligent |E*| pre- diction models were developed using the latest comprehensive |E*| database that is available to researchers (from National Cooperative Highway Research Program Report 547) containing 7400 data points from 346 HMA mixtures. The ANN model predictions were compared with the Hirsch |E*| prediction model, which has a logical structure and a relatively sim- ple prediction model in terms of the number of input parameters needed with respect to the existing |E*| models. The ANN-based |E*| predictions showed significantly higher accuracy compared with the Hirsch model predictions. The sensi- tivity of input variables to the ANN model predictions were also examined and discussed. Key words: dynamic (|E*|) modulus, asphalt, artificial neural network, prediction model, mechanistic–empirical pavement design guide. Re ´sume ´: Le module dynamique (|E*|) est l’une des principales proprie ´te ´s du me ´lange d’asphalte a ` chaud utilise ´e en en- tre ´e aux trois niveaux hie ´rarchiques dans le nouveau guide de conception me ´canisto-empirique des chausse ´es (« Mechanis- tic-empirical pavement design guide »). Les mode `les actuels de pre ´diction de |E*| sont principalement de ´veloppe ´s a ` l’aide d’analyses de re ´gression de bases de donne ´es de |E*| obtenues a ` partir de tests en laboratoire sur de nombreuses anne ´es. Ils manquent en ge ´ne ´ral de la pre ´cision ne ´cessaire pour faire des pre ´dictions fiables. Cet article de ´crit la mise au point d’un mode `le de pre ´diction simplifie ´ du |E*| du me ´lange d’asphalte a ` chaud qui emploie la me ´thodologie des re ´seaux de neurones artificiels (RNA). Les mode `les de pre ´diction intelligents de |E*| ont e ´te ´ de ´veloppe ´s en utilisant la base de don- ne ´es comple `te de |E*| la plus re ´cente (rapport n o 547 du National Cooperative Highway Research Program) a ` la disposition des chercheurs et contenant 7400 exemples provenant de 346 me ´langes d’asphalte a ` chaud. Les pre ´dictions de |E*| a ` partir du mode `le des RNA ont e ´te ´ compare ´es a ` celles du mode `le de Hirsch, lequel a une structure logique et un mode `le de pre ´- diction relativement simple en termes du nombre de parame `tres ne ´cessaires en entre ´e comparativement aux autres mode `les de pre ´diction de |E*| existants. Les pre ´dictions de |E*| fonde ´es sur le mode `le des RNA ont montre ´ une pre ´cision significa- tivement plus e ´leve ´e comparativement a ` celles du mode `le de Hirsch. La sensibilite ´ des variables d’entre ´e aux pre ´dictions du mode `le des RNA a aussi e ´te ´ examine ´e et discute ´e. Mots-cle ´s : module dynamique (|E*|), asphalte, re ´seaux de neurones artificiels, mode `le de pre ´diction, guide de conception me ´canisto-empirique des chausse ´es. [Traduit par la Re ´daction] Introduction The dynamic modulus (|E*|) is one of the asphalt mixture stiffness measures that determines the strains and displace- ments in a flexible pavement structure as it is loaded or un- loaded. The asphalt mixture stiffness can alternatively be characterized via the flexural stiffness, creep compliance, re- laxation modulus, and resilient modulus. One of the most significant advantages of using |E*| is that over the last 50 years researchers have accumulated a wealth of historic laboratory data for the test’s input and output variables. The |E*| is one of the primary hot-mix asphalt (HMA) material property inputs at all three hierarchical levels in the new Mechanistic–empirical pavement design guide (MEPDG) (NCHRP 2004) developed under National Cooperative Highway Research Program (NCHRP) 1–37 A (NCHRP 2004) for the American State Highway and Transportation Officials (AASHTO). It is also a promising candidate for Received 16 April 2007. Revision accepted 17 January 2008. Published on the NRC Research Press Web site at cjce.nrc.ca on 9 July 2008. H. Ceylan. 1 Department of Civil Engineering, 482B Town Engineering Building, Iowa State University, Ames, IA 50011- 3232, USA. K. Gopalakrishnan. Department of Civil Engineering, 353 Town Engineering Building, Iowa State University, Ames, IA 50011-3232, USA. S. Kim. Department of Civil Engineering, 192 Town Engineering Building, Iowa State University, Ames, IA 50011- 3232, USA. Written discussion of this article is welcomed and will be received by the Editor until 30 November 2008. 1 Corresponding author (e-mail: [email protected]). 699 Can. J. Civ. Eng. 35: 699–707 (2008) doi:10.1139/L08-016 # 2008 NRC Canada

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Advanced approaches to hot-mix asphalt dynamicmodulus prediction
Halil Ceylan, Kasthurirangan Gopalakrishnan, and Sunghwan Kim
Abstract: The dynamic modulus (|E*|) is one of the primary hot-mix asphalt (HMA) material property inputs at all threehierarchical levels in the new Mechanistic–empirical pavement design guide (MEPDG). The existing |E*| prediction mod-els were developed mainly from regression analysis of an |E*| database obtained from laboratory testing over many yearsand, in general, lack the necessary accuracy for making reliable predictions. This paper describes the development of asimplified HMA |E*| prediction model employing artificial neural network (ANN) methodology. The intelligent |E*| pre-diction models were developed using the latest comprehensive |E*| database that is available to researchers (from NationalCooperative Highway Research Program Report 547) containing 7400 data points from 346 HMA mixtures. The ANNmodel predictions were compared with the Hirsch |E*| prediction model, which has a logical structure and a relatively sim-ple prediction model in terms of the number of input parameters needed with respect to the existing |E*| models. TheANN-based |E*| predictions showed significantly higher accuracy compared with the Hirsch model predictions. The sensi-tivity of input variables to the ANN model predictions were also examined and discussed.
Key words: dynamic (|E*|) modulus, asphalt, artificial neural network, prediction model, mechanistic–empirical pavementdesign guide.
Resume : Le module dynamique (|E*|) est l’une des principales proprietes du melange d’asphalte a chaud utilisee en en-tree aux trois niveaux hierarchiques dans le nouveau guide de conception mecanisto-empirique des chaussees (« Mechanis-tic-empirical pavement design guide »). Les modeles actuels de prediction de |E*| sont principalement developpes a l’aided’analyses de regression de bases de donnees de |E*| obtenues a partir de tests en laboratoire sur de nombreuses annees.Ils manquent en general de la precision necessaire pour faire des predictions fiables. Cet article decrit la mise au pointd’un modele de prediction simplifie du |E*| du melange d’asphalte a chaud qui emploie la methodologie des reseaux deneurones artificiels (RNA). Les modeles de prediction intelligents de |E*| ont ete developpes en utilisant la base de don-nees complete de |E*| la plus recente (rapport no 547 du National Cooperative Highway Research Program) a la dispositiondes chercheurs et contenant 7400 exemples provenant de 346 melanges d’asphalte a chaud. Les predictions de |E*| a partirdu modele des RNA ont ete comparees a celles du modele de Hirsch, lequel a une structure logique et un modele de pre-diction relativement simple en termes du nombre de parametres necessaires en entree comparativement aux autres modelesde prediction de |E*| existants. Les predictions de |E*| fondees sur le modele des RNA ont montre une precision significa-tivement plus elevee comparativement a celles du modele de Hirsch. La sensibilite des variables d’entree aux predictionsdu modele des RNA a aussi ete examinee et discutee.
Mots-cles : module dynamique (|E*|), asphalte, reseaux de neurones artificiels, modele de prediction, guide de conceptionmecanisto-empirique des chaussees.
[Traduit par la Redaction]
Introduction
The dynamic modulus (|E*|) is one of the asphalt mixturestiffness measures that determines the strains and displace-ments in a flexible pavement structure as it is loaded or un-loaded. The asphalt mixture stiffness can alternatively becharacterized via the flexural stiffness, creep compliance, re-laxation modulus, and resilient modulus. One of the mostsignificant advantages of using |E*| is that over the last50 years researchers have accumulated a wealth of historiclaboratory data for the test’s input and output variables. The|E*| is one of the primary hot-mix asphalt (HMA) materialproperty inputs at all three hierarchical levels in the newMechanistic–empirical pavement design guide (MEPDG)(NCHRP 2004) developed under National CooperativeHighway Research Program (NCHRP) 1–37 A (NCHRP2004) for the American State Highway and TransportationOfficials (AASHTO). It is also a promising candidate for
Received 16 April 2007. Revision accepted 17 January 2008.Published on the NRC Research Press Web site at cjce.nrc.ca on9 July 2008.
H. Ceylan.1 Department of Civil Engineering, 482B TownEngineering Building, Iowa State University, Ames, IA 50011-3232, USA.K. Gopalakrishnan. Department of Civil Engineering, 353Town Engineering Building, Iowa State University, Ames, IA50011-3232, USA.S. Kim. Department of Civil Engineering, 192 TownEngineering Building, Iowa State University, Ames, IA 50011-3232, USA.
Written discussion of this article is welcomed and will bereceived by the Editor until 30 November 2008.
1Corresponding author (e-mail: [email protected]).
699
Can. J. Civ. Eng. 35: 699–707 (2008) doi:10.1139/L08-016 # 2008 NRC Canada

the simple performance test (SPT) recommended by theNCHRP 9–19 (Witczak et al. 2002) and 9–29 (Bonaquist etal. 2003) projects.
Level 1 of the MEDPG requires direct measurement of|E*| via laboratory testing, such as the simple performancetest. Level 2 applies the |E*| predictive model for estimating|E*| combined with laboratory-measured binder stiffness orviscosity. The |E*| in level 3 is estimated from the same|E*| predictive model in level 2 with typical binder and mix-ture properties suggested by the designer based on past ex-perience and engineering judgment. The |E*| predictivemodel at levels 2 and 3 in the current version (version 0.9)of MEPDG (NCHRP 2006a) is the |E*| predictive model(referred to as the 1999 version of the Witczak |E*| predic-tion model) developed by Witczak and his colleges in 1999(Andrei et al. 1999). However, this Witczak |E*| predictionmodel uses the conventional viscosity (h) instead of thebinder dynamic shear modulus (|Gb*|) value of the asphaltbinder, which requires a middle step of conversion from|Gb*| [that the current superpave binder performance grading(PG) system uses] to h (Al-Khateeb et al. 2006). In addition,for the most part it is an empirical regression model anddoes not adequately utilize volumetric composition in itsformulation (Christensen et al. 2003).
Recently, a new revised version of Witczak’s |E*| predic-tive model has been developed to overcome the middle stepof binder parameter conversion that is included in the cur-rent version (Bari and Witczak 2006). In addition to calibra-tion with the extended database, the new revised modelincludes the |Gb*| and the binder phase angle (d) instead ofthe h and the frequency ( f ) parameter. This new revisedversion of Witczak’s |E*| predictive model will include thefuture version (version 1.0) of MEPDG (NCHRP 2006b).However, this new revised model is still an empirical regres-sion model and requires many inputs (eight input parame-ters), which makes dealing with this model laborious.
The Hirsch |E*| model for HMA was developed to serveas a tool for analyzing the effect of changes in air voids,voids in mineral aggregate (VMA), and other volumetricmix factors on the modulus of asphalt concrete and relatedmechanical properties (Christensen et al. 2003). Since thismodel is based on a law of material for composite material,its structure is rational and logical. It is also relatively sim-pler than the Witczak |E*| model in that it requires fewerconstituent properties including |Gb*|, voids filled with as-phalt (VFA), and VMA of the asphalt mixture. However,the Hirsch |E*| model shows poor accuracy for the expanded|E*| database containing modified asphalt mixtures becausethe original model was developed using limited data for as-phalt mixtures that primarily consisted of unmodified asphaltbinders (Al-Khateeb et al. 2006; Bari and Witczak 2006).
The primary objective of this study is to develop an intel-ligent |E*| prediction model with significantly higher predic-tion accuracy compared with the existing |E*| models, whichcould also be easily incorporated into the MEPDG. Over thepast two decades, artificial neural networks (ANNs) haveemerged as powerful and versatile computational tools fororganizing and correlating information in ways that haveproved useful for solving certain types of problems too com-plex, too poorly understood or too resource-intensive to
tackle using more traditional numerical and statistical meth-ods (TRB Circular 1999).
Recently, researchers at Iowa State University developeda novel approach for predicting HMA |E*| using the artifi-cial neural network (ANN) methodology based on the inputparameters of the Witczak |E*| model (Ceylan et al. 2007).In this paper, research efforts related to the development ofa simple approach for predicting HMA |E*| using the ANNmethodology based on the input parameters of the Hirsch|E*| model are documented. The comprehensive |E*| data-base containing 7400 data records, which were used in thedevelopment of the revised Witczak |E*| model (Bari andWitczak 2006), were used in developing the ANN models.This paper describes the development of ANN-based |E*|prediction models, the comparison of ANN model predic-tions with the Hirsch |E*| model predictions, and the sensi-tivity of input variables to ANN model predictions.
Hirsch model for dynamic modulus (|E*|) ofasphalt mixtures
|E*| is the response of the material under dynamic loadingdetermined in the linear elastic or viscoelastic range by di-viding the loading stress amplitude by the peak-to-peak re-coverable strain (Al-Khateeb et al. 2006).
The definition of |E*| comes from the complex modulus(E*) consisting of both a real and imaginary component asshown in eq. [1]:
½1� E� ¼ E1 þ iE2
where i ¼ffiffiffiffiffiffiffi�1
p, E1 is the storage modulus part of the com-
plex modulus, and E2 is the loss modulus part of the com-plex modulus. |E*| can be mathematically defined as themagnitude of the complex modulus as shown in eq. [2]:
½2� jE�j ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE21 þ E2
2
q
|E*| is also determined experimentally as the ratio of theapplied stress amplitude to the strain response amplitudeunder a sinusoidal loading as shown in eq. [3]:
½3� jE�j ¼ �0="0
Here, s0 is the average stress amplitude and 30 is the aver-age recoverable strain. The |E*| of an asphalt mixture isstrongly dependent upon temperature (T ) and loading rate,defined either in terms of load time (t) or frequency ( f ). Us-ing time–temperature superposition concepts represented byshift factors as shown in eq. [4], the combined effects oftemperature and loading rate or time can be represented inthe form of a master curve relating |E*| to a reduced time(tr) by a sigmoidal function described in eq. [5]:
½4� aðTÞ ¼ t=tr
½5� LogjE�j ¼ � þ �=½1þ e�þ�ðlogtrÞ�
where a(T) is shift factor as a function of temperature, t istime of loading at desired temperature, tr is the reducedtime of loading at the reference temperature, and T is thetemperature of interest. In eq. [5], d is the minimum valueof |E*|, a + d is the maximum value of |E*|, and b and g
700 Can. J. Civ. Eng. Vol. 35, 2008
# 2008 NRC Canada

are the horizontal location of the transition zone and itsslope, respectively. The function parameters d and a will,in general, depend on the aggregate gradation and mixturevolumetrics whereas the parameters b and g will dependprimarily on the characteristics of the asphalt binder(Schwartz 2005). The values for d, a, b, and g and thea(T ) at each temperature are all simultaneously determinedfrom test data using nonlinear optimization techniques. The|E*| of an asphalt mixture in the MEPDG, at all levels oftemperature and time rate of load, is determined from amaster curve constructed at a reference temperature(NCHRP 2004).
Numerous |E*| predictive models have also been devel-oped over the last 50 years for estimating |E*| using availableasphalt binder and mixture data, particularly knowing thatdynamic modulus measurements at extreme conditions oftemperatures and loading frequencies are difficult to obtainin the laboratory. Among these models, the Witczak |E*|model developed by Witczak and his colleagues (Witczakand Fonseca 1996; Andrei et al. 1999; Bari and Witczak2006) and the Hirsch |E*| model proposed by Christensen etal. (2003) seem to have reasonable capability for predicting|E*| of an asphalt mixture (Al-Khateeb et al. 2006).
Witczak and his associates (Witczak and Fonseca 1996;Andrei et al. 1999; Bari and Witczak 2006) have developedand modified a predictive equation for estimating |E*| of as-phalt concrete as a function of mix design inputs and asphaltbinder properties using a large database of thousands of dy-namic modulus test data points. More detailed descriptionsand research efforts related to the development of the Witc-zak |E*| model were summarized by Bari and Witczak(2006).
Christensen et al. (2003) proposed a modified Hirschmodel for predicting |E*| of asphalt concrete based on thelaw of mixtures. The original Hirsch model as shown inFig. 1 and eq. [6] was developed by T. J. Hirsch to calculatethe modulus of elasticity of cement concrete or mortar interms of one empirical constant, the aggregate modulus andcement mastic modulus, and mix proportions (Hirsch 1961).Hirsch assumed that the response of the constituent materi-als (cement matrix, aggregate, and composite concrete) be-haved in a linear elastic manner.
½6� 1
EC
¼ v1s
E1
þ v2s
E2
þ ðv1p þ v2pÞ2ðv1pE1 þ v2pE2Þ
where, E refers to the modulus, or some other materialproperty; v1s and v2s refer to the volume fractions of phases1 and 2, respectively, in series arrangement; v1p and v2p re-fer to the volume fractions of phases 1 and 2, respectively,in parallel arrangement; the subscript C refers to the compo-site; and the subscript 1 and 2 refer to different phases pre-sent in the composite.
Christensen et al. (2003) modified the original Hirschmodel (Hirsch 1961) to a relatively simple version for esti-mating the complex modulus and phase angle of asphaltconcrete under shear and compression. They presented fouralternative versions of a modified Hirsch model with differ-ent formulations as shown in Fig. 2: (i) series formulation,(ii) parallel formulation, (iii) dispersed formulation, and(iv) alternate formulation. Their refinement and analysis
showed that the first three versions of the Hirsch model didnot provide good accuracy, but the fourth formulation (thealternate one), which is a generalization of parallel andseries formulation, provided consistently better accuracy ontheir data. It was also found in their study that this versionof the Hirsch model produced the best results and had theadvantage over the other versions of simplicity andsimilarity to the original formulation of the Hirsch model(Al-Khateeb et al. 2006).
What was common in the first three formulations pre-sented in Christensen et al. (2003) is the use of what iscalled the aggregate contact volume (Vc) and the use of theasphalt mastic (asphalt binder + mineral filler) phase insteadof the asphalt binder phase alone. The fourth formulation ofthe Hirsch model was further simplified by treating asphaltconcrete as a three-phase system of aggregate, asphaltbinder, and air voids (eq. [7]),
Fig. 1 Schematic representation of composite model for Hirsch ar-rangement of phases (Christensen et al. 2003).
Fig. 2 Schematic representation of four alternate versions of modi-fied Hirsch model (Christensen et al. 2003): (a) series version, (b)parallel version, (c) dispersed version, and (d) alternate version. Va’,aggregate volume exclusive of the contact volume; Va’p, aggregatevolume exclusive of the contact volume in the parallel phase; Va’s,aggregate volume exclusive of the contact volume in the seriesphase; Vc, aggregate contact volume; Vm, mastic volume; Vmp, mas-tic volume in the parallel phase; Vms, mastic volume in the seriesphase; Vv, air void volume; Vvp, air void volume in the parallelphase; Vvs, air void volume in the series phase.
Ceylan et al. 701
# 2008 NRC Canada

½7� EC ¼ PcðVaEa þ VbEbÞ
þð1� PcÞVa
Ea
þ ðVb þ VVÞ2VbEb
� ��1
where Pc is the contact factor, Va is the aggregate volume,Ea is the aggregate modulus, Vb is the effective binder vo-lume, Eb is the binder modulus, and VV is air volume. Theuse of Pc as described in eq. [8] was also introduced to re-present the proportion of parallel to total phase volume.
½8� Pc ¼ðP0 þ VFAEb=VMAÞP1
P2 þ ðVFAEb=VMAÞP1
where P0, P1, and P2 are empirically determined constants.Using 206 data points obtained from 18 different HMA
mixes originating from the Federal Highway Administra-tion’s (FHWA’s) accelerated loading facility (ALF) project,the MnROAD project, and the WesTrack project, the refine-ment of eqs. [7] and [8] were performed with a nonlinearleast squares method. Equation [9] (Christensen et al. 2003)shows the final equation of the Hirsch model after refine-ment, which is the most effective version in different modelformulations.
½9� jE�jmix ¼ Pc 4 200 000ð1� VMA=100Þ þ 3jG�jbinder
�VFAÞðVMAÞ
10 000
24
35
8<:
9=;
þð1� PcÞ1� VMA=100
4 200 000þ VMA
3VFAjG�jbinder
� ��1
where |E*|mix is the absolute value of the mixture dynamicmodulus,
Pc ¼f20þ ½VFAð3jG�jbinderÞ=VMA�g0:58650þ ½VFAð3jG�jbinderÞ=VMA�0:58
and |G*|binder is the absolute value of the asphalt bindercomplex modulus.
One of the main conclusions of their study was that themost effective version of the Hirsch |E*| model as shown ineq. [9] is relatively simpler than the Witczak model in that itrequires fewer constituent properties to calculate |Gb*|, VFA,and VMA of the mixture. However, Bari and Witczak(2006) reported that the Hirsh |E*| model could not providegood prediction [correlation coefficient (R2) = 0.61 in a log-arithmic scale and R2 = 0.23 in an arithmetic scale] whenapplied to a more expanded database used for the most re-cent revised version of the Witczak |E*| model in 2006(Bari and Witczak (2006)), which contained 7400 datapoints obtained from 346 different HMA mixes.
Using the database from the FHWA’s ALF pavementmixtures, Al-Khateeb et al. (2006) modified the Hirsch |E*|model and proposed a simplistic |E*| model requiring onlytwo parameters (|Gb*| and VMA). This simplified Hirsch|E*| model provided good predictions for mixtures takenfrom the FHWA’s ALF pavement with a standard errorwithin an acceptable range.
Neural networks approach to |E*| prediction
A published literature review (Dougherity 1995; TRBCircular 1999; Adeli 2001) suggests that ANNs and othersoft computing techniques, such as fuzzy mathematical pro-gramming and evolutionary computing (including genetic al-gorithms), are increasingly used instead of traditionalmethods in civil and transportation applications (Flintsch
2003). The recent adoption and use of ANN modelingtechniques in the MEPDG (NCHRP 2004) has placed spe-cial emphasis on the successful use of neural nets in geome-chanical and pavement systems. A current TransportationResearch Board subcommittee, AFS50(1) [formerlyA2K05(1)], has been focused on ‘‘applications of nontradi-tional computing tools including neural networks,’’ with theprimary mission being the provision of a better understand-ing of ANNs to practitioners and at the same time foster theuse of these ANNs and other nontraditional computationalintelligence techniques in pavement engineering applica-tions. In this study, the ANN methodology was used to de-velop robust |E*| prediction models based on the latestcomprehensive |E*| database.
The basic element in the ANN is a processing element(artificial neuron). An artificial neuron receives information(signal) from other neurons, processes it, and then relays thefiltered signal to the other neurons (Tsoukalas and Uhrig1997). The receiving end of the neuron has incoming signalsX1, X2,. . ., Xn. Each of them is assigned a weight, which isgiven based on experience and which may change duringthe training process. The summation of all the weighted sig-nal amounts yields the combined input quantity, Ik. Thecombined input quantity, Ik, is then sent to a pre-selectedtransfer function (sometimes called an activation function),T, and a filtered output, Yk, is generated in the outgoing endof the artificial neuron k through the mapping of the transferfunction. The process can be written as the followingeqs. [10] and [11]:
½10� Ik ¼Xni¼1
wikxi
½11� Yk ¼ TðIÞ
702 Can. J. Civ. Eng. Vol. 35, 2008
# 2008 NRC Canada

where wik is the weight, xi is the incoming signal, and T(I) isthe transfer function.
There are several types of transfer functions that can beused, including sigmoid, threshold, and Gaussian functions.The transfer function used most often is the sigmoid func-tion because of its differentiability. The sigmoid functioncan be represented by the following eq. [12]:
½12� TðIÞ ¼ 1
1þ expð�’IÞ
where ’ is the positive scaling constant, which controls thesteepness between the two asymptotic values 0 and 1(Tsoukalas and Uhrig 1997).
The ANN performs two major functions: learning(training) and testing. This study used the backpropagationlearning algorithm for the ANN, which is a supervisedlearning algorithm in which the network is trained on a setof input–output pairs. Backpropagation ANNs are verypowerful and versatile networks that can be taught mappingfrom one data space to another using a representative set ofpatterns and (or) examples to be learned. The term ‘‘back-propagation network’’ actually refers to a multi-layered,feed-forward neural network trained using an error backpro-pagation algorithm. The learning process performed by thisalgorithm is called ‘‘backpropagation learning,’’ which ismainly an ‘‘error minimization technique’’ (Haykin 1999).
In the development of backpropagation ANN models, theconnection weights and node biases are initially selected atrandom. Inputs from the mapping examples are propagated for-ward through each layer of the network to emerge as outputs.The errors between those outputs and the correct answers arethen propagated backwards through the network and theconnection weights and node biases are individually adjustedto reduce the error. After many examples (training patterns)are propagated through the network many times, the mappingfunction is learned with some specified error tolerance. Thisis called supervised learning because the network has ad-justed functional mapping using the correct answers. Thenetwork is considered to be well trained when the errorreaches a minimum or an allowable limit. The networkperformance is verified by presenting unknown testing da-tasets to the ANN after training is completed. BackpropagationANNs excel at data modeling with their superior functionapproximation (Meier and Tutumluer 1998; Haykin 1999).
For the problem being discussed in this paper, a range of(–0.2, +0.2) was used for random initialization of all synap-tic weight vectors in the network with a bias. For this prob-lem, the sigmoidal function was chosen as the nonlinearactivation function at the output end of all hidden neurons.Because the final outputs (layer moduli) are real valuesrather than binary outputs, a linear combiner model wasused for neurons in the output layer, thus omitting the non-linear activation function. A smooth learning curve wasachieved with a learning-rate parameter of 0.4 and a mo-mentum factor of 0.6.
Preparation of the artificial neural networkdatabase
Input variables for the |E*| ANN prediction model wereretrieved from the NCHRP Report 567 CD-ROM (CRP-CD-
46) Simple performance tests: summary of recommendedmethods and database (Witczak 2005). The CRP-CD-46 in-cluded as an appendix in the NCHRP report 567 containsnot only the |E*| new database (Arizona State Universityand University of Maryland databases), but also all data andinformation collected and used during the NCHRP 9–19study (Witczak et al. 2002). The four input variables of theHirsch |E*| predictive equations (see eq. [9]) were used inthe ANN model (ANN Hirsch). The one output variablewas the |E*| in the ANN model. A total of 7400 data records(which were also used in developing the new and revisedWitczak |E*| model) were used in developing the ANNmodel. Table 1 shows the description and ranges of valuesfor all input and output variables used in the ANN models.
The data were divided randomly into two different sub-sets: the training data subset containing 6900 data pointsand the testing data subset wthat consisted of 500 datapoints. Both datasets were normalized within the rangeof –2 to 2 for input values and the range of 0.1 to 0.9 foroutput values to satisfy the transfer function (sigmoid)range and to prevent network saturation, which could im-pede the network’s performance. The training data subsetwas used to train the backpropagation ANN |E*| predictionmodel and the testing data subset was used to examine thestatistical accuracy of the developed ANN model. Thetrained ANN models were also finally evaluated using all7400 data points to obtain the overall predictive accuracyand to compare it with the existing |E*| predictive models.
Development of artificial neural network |E*|prediction model
A typical four-layered, i.e., one input – two hidden – oneoutput layer, feed-forward-error back-propagation ANN ar-chitecture, as shown in Fig. 3, was used in this study. Toensure efficient convergence and the desired performance ofthe trained network, several parameters were incorporated inthe training phase. These parameters included the trainingrate, the momentum term, and the number of learning cycles(epochs).
The training rate is a factor that proportions the amount ofadjustment applied each time the weight is updated. A smalltraining rate may result in slower convergence and droppinginto the local minima conditions in the weight-error space.A large training rate often causes the convergence behaviorof the network to oscillate and possibly never converge(Owusu-Ababio 1998). The use of a momentum term could
Table 1. Definitions and ranges of values for input and outputvariables used in artificial neural network training.
Range
Variable Min. Max. MeanStandarddeviation
Mixture volumetric,VMA (%)
10.3 34.6 17.5 3.7
Mixture volumetric,VFA (%)
32.8 99.4 61.8 10.6
Binder, |Gb*| (kPa) 0.1 50 930.6 6867.3 9695.1Contact factor, Pc 0 0.6 0.2 0.2Dynamic modulus,
|E*| (GPa)0.1 59.6 9.0 10.1
Ceylan et al. 703
# 2008 NRC Canada
carry the weight-change process through one or more localminima and get it into global minima. The training rate andthe momentum coefficient used in the study were 0.4 and0.6, respectively.
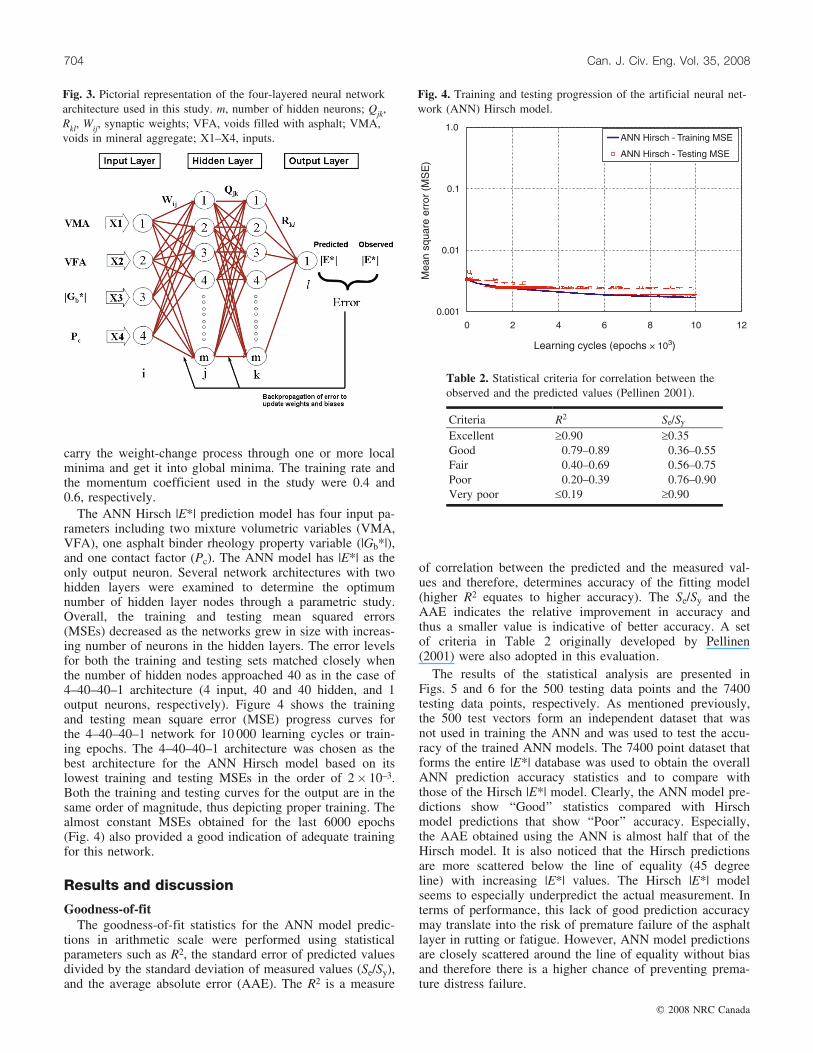
The ANN Hirsch |E*| prediction model has four input pa-rameters including two mixture volumetric variables (VMA,VFA), one asphalt binder rheology property variable (|Gb*|),and one contact factor (Pc). The ANN model has |E*| as theonly output neuron. Several network architectures with twohidden layers were examined to determine the optimumnumber of hidden layer nodes through a parametric study.Overall, the training and testing mean squared errors(MSEs) decreased as the networks grew in size with increas-ing number of neurons in the hidden layers. The error levelsfor both the training and testing sets matched closely whenthe number of hidden nodes approached 40 as in the case of4–40–40–1 architecture (4 input, 40 and 40 hidden, and 1output neurons, respectively). Figure 4 shows the trainingand testing mean square error (MSE) progress curves forthe 4–40–40–1 network for 10 000 learning cycles or train-ing epochs. The 4–40–40–1 architecture was chosen as thebest architecture for the ANN Hirsch model based on itslowest training and testing MSEs in the order of 2� 10–3.Both the training and testing curves for the output are in thesame order of magnitude, thus depicting proper training. Thealmost constant MSEs obtained for the last 6000 epochs(Fig. 4) also provided a good indication of adequate trainingfor this network.
Results and discussion
Goodness-of-fitThe goodness-of-fit statistics for the ANN model predic-
tions in arithmetic scale were performed using statisticalparameters such as R2, the standard error of predicted valuesdivided by the standard deviation of measured values (Se/Sy),and the average absolute error (AAE). The R2 is a measure
of correlation between the predicted and the measured val-ues and therefore, determines accuracy of the fitting model(higher R2 equates to higher accuracy). The Se/Sy and theAAE indicates the relative improvement in accuracy andthus a smaller value is indicative of better accuracy. A setof criteria in Table 2 originally developed by Pellinen(2001) were also adopted in this evaluation.
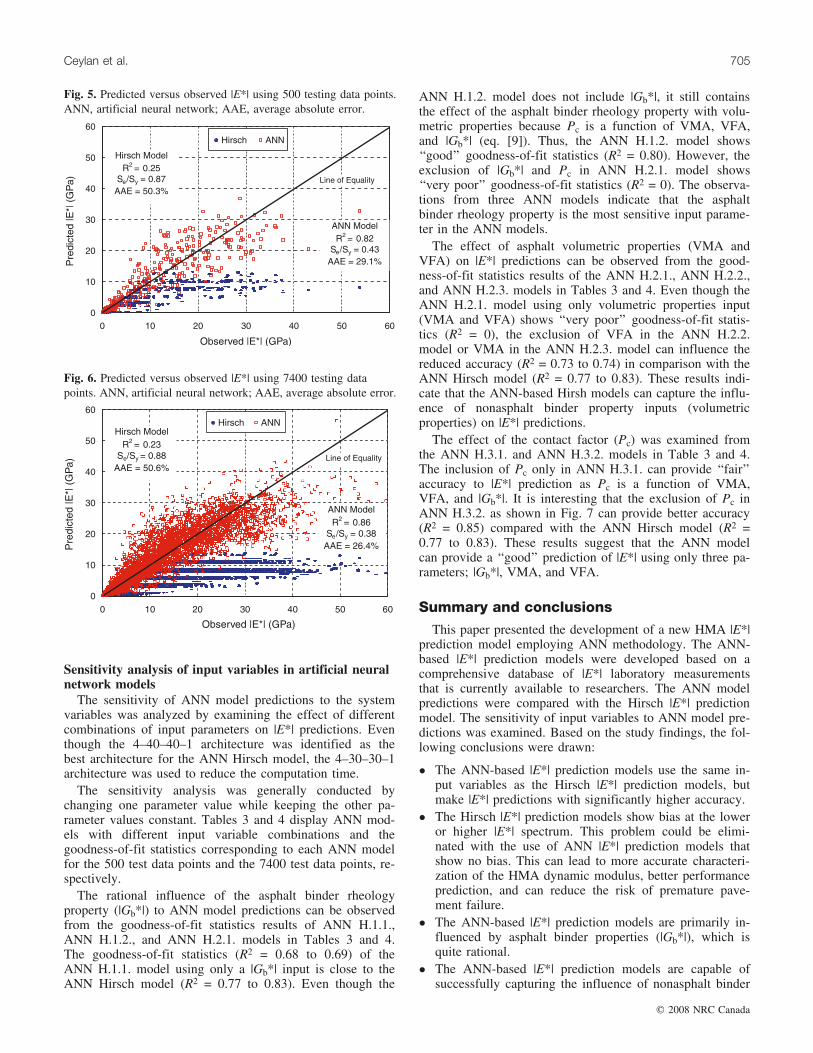
The results of the statistical analysis are presented inFigs. 5 and 6 for the 500 testing data points and the 7400testing data points, respectively. As mentioned previously,the 500 test vectors form an independent dataset that wasnot used in training the ANN and was used to test the accu-racy of the trained ANN models. The 7400 point dataset thatforms the entire |E*| database was used to obtain the overallANN prediction accuracy statistics and to compare withthose of the Hirsch |E*| model. Clearly, the ANN model pre-dictions show ‘‘Good’’ statistics compared with Hirschmodel predictions that show ‘‘Poor’’ accuracy. Especially,the AAE obtained using the ANN is almost half that of theHirsch model. It is also noticed that the Hirsch predictionsare more scattered below the line of equality (45 degreeline) with increasing |E*| values. The Hirsch |E*| modelseems to especially underpredict the actual measurement. Interms of performance, this lack of good prediction accuracymay translate into the risk of premature failure of the asphaltlayer in rutting or fatigue. However, ANN model predictionsare closely scattered around the line of equality without biasand therefore there is a higher chance of preventing prema-ture distress failure.
Fig. 3. Pictorial representation of the four-layered neural networkarchitecture used in this study. m, number of hidden neurons; Qjk,Rkl, Wij, synaptic weights; VFA, voids filled with asphalt; VMA,voids in mineral aggregate; X1–X4, inputs.
Fig. 4. Training and testing progression of the artificial neural net-work (ANN) Hirsch model.
Table 2. Statistical criteria for correlation between theobserved and the predicted values (Pellinen 2001).
Criteria R2 Se/Sy
Excellent ‡0.90 ‡0.35Good 0.79–0.89 0.36–0.55Fair 0.40–0.69 0.56–0.75Poor 0.20–0.39 0.76–0.90Very poor £0.19 ‡0.90
704 Can. J. Civ. Eng. Vol. 35, 2008
# 2008 NRC Canada
Sensitivity analysis of input variables in artificial neuralnetwork models
The sensitivity of ANN model predictions to the systemvariables was analyzed by examining the effect of differentcombinations of input parameters on |E*| predictions. Eventhough the 4–40–40–1 architecture was identified as thebest architecture for the ANN Hirsch model, the 4–30–30–1architecture was used to reduce the computation time.
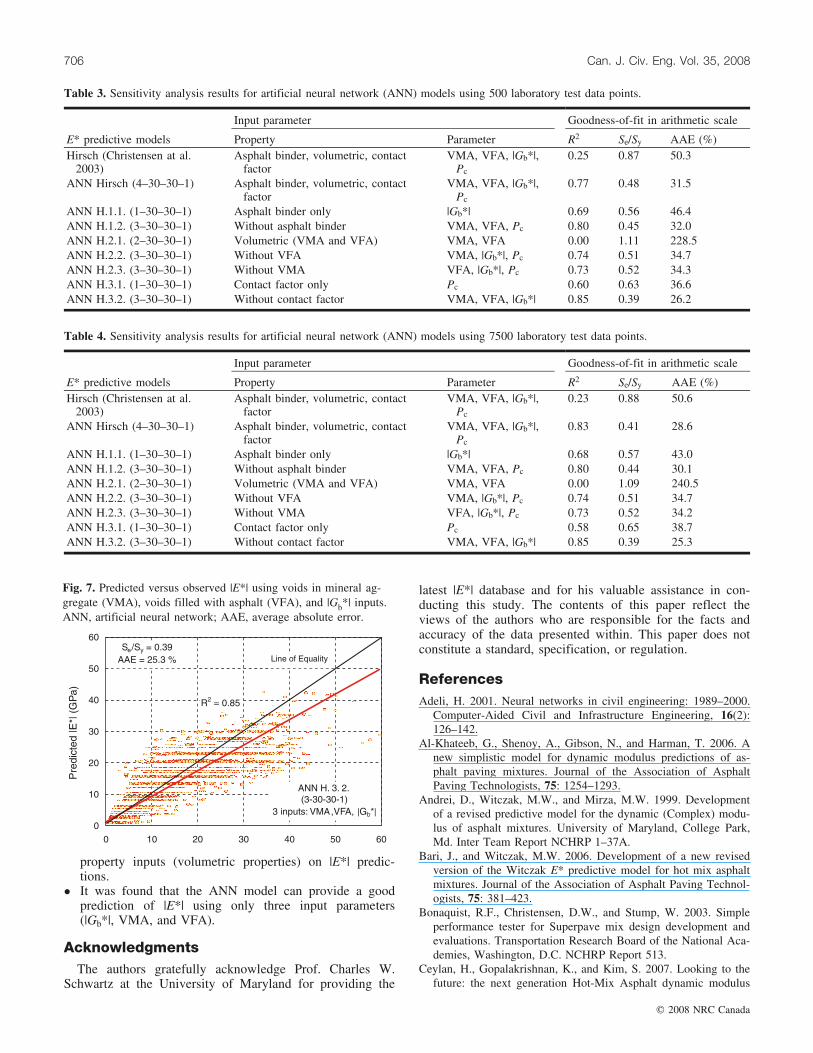
The sensitivity analysis was generally conducted bychanging one parameter value while keeping the other pa-rameter values constant. Tables 3 and 4 display ANN mod-els with different input variable combinations and thegoodness-of-fit statistics corresponding to each ANN modelfor the 500 test data points and the 7400 test data points, re-spectively.
The rational influence of the asphalt binder rheologyproperty (|Gb*|) to ANN model predictions can be observedfrom the goodness-of-fit statistics results of ANN H.1.1.,ANN H.1.2., and ANN H.2.1. models in Tables 3 and 4.The goodness-of-fit statistics (R2 = 0.68 to 0.69) of theANN H.1.1. model using only a |Gb*| input is close to theANN Hirsch model (R2 = 0.77 to 0.83). Even though the
ANN H.1.2. model does not include |Gb*|, it still containsthe effect of the asphalt binder rheology property with volu-metric properties because Pc is a function of VMA, VFA,and |Gb*| (eq. [9]). Thus, the ANN H.1.2. model shows‘‘good’’ goodness-of-fit statistics (R2 = 0.80). However, theexclusion of |Gb*| and Pc in ANN H.2.1. model shows‘‘very poor’’ goodness-of-fit statistics (R2 = 0). The observa-tions from three ANN models indicate that the asphaltbinder rheology property is the most sensitive input parame-ter in the ANN models.
The effect of asphalt volumetric properties (VMA andVFA) on |E*| predictions can be observed from the good-ness-of-fit statistics results of the ANN H.2.1., ANN H.2.2.,and ANN H.2.3. models in Tables 3 and 4. Even though theANN H.2.1. model using only volumetric properties input(VMA and VFA) shows ‘‘very poor’’ goodness-of-fit statis-tics (R2 = 0), the exclusion of VFA in the ANN H.2.2.model or VMA in the ANN H.2.3. model can influence thereduced accuracy (R2 = 0.73 to 0.74) in comparison with theANN Hirsch model (R2 = 0.77 to 0.83). These results indi-cate that the ANN-based Hirsh models can capture the influ-ence of nonasphalt binder property inputs (volumetricproperties) on |E*| predictions.
The effect of the contact factor (Pc) was examined fromthe ANN H.3.1. and ANN H.3.2. models in Table 3 and 4.The inclusion of Pc only in ANN H.3.1. can provide ‘‘fair’’accuracy to |E*| prediction as Pc is a function of VMA,VFA, and |Gb*|. It is interesting that the exclusion of Pc inANN H.3.2. as shown in Fig. 7 can provide better accuracy(R2 = 0.85) compared with the ANN Hirsch model (R2 =0.77 to 0.83). These results suggest that the ANN modelcan provide a ‘‘good’’ prediction of |E*| using only three pa-rameters; |Gb*|, VMA, and VFA.
Summary and conclusions
This paper presented the development of a new HMA |E*|prediction model employing ANN methodology. The ANN-based |E*| prediction models were developed based on acomprehensive database of |E*| laboratory measurementsthat is currently available to researchers. The ANN modelpredictions were compared with the Hirsch |E*| predictionmodel. The sensitivity of input variables to ANN model pre-dictions was examined. Based on the study findings, the fol-lowing conclusions were drawn:
� The ANN-based |E*| prediction models use the same in-put variables as the Hirsch |E*| prediction models, butmake |E*| predictions with significantly higher accuracy.
� The Hirsch |E*| prediction models show bias at the loweror higher |E*| spectrum. This problem could be elimi-nated with the use of ANN |E*| prediction models thatshow no bias. This can lead to more accurate characteri-zation of the HMA dynamic modulus, better performanceprediction, and can reduce the risk of premature pave-ment failure.
� The ANN-based |E*| prediction models are primarily in-fluenced by asphalt binder properties (|Gb*|), which isquite rational.
� The ANN-based |E*| prediction models are capable ofsuccessfully capturing the influence of nonasphalt binder
Fig. 5. Predicted versus observed |E*| using 500 testing data points.ANN, artificial neural network; AAE, average absolute error.
Fig. 6. Predicted versus observed |E*| using 7400 testing datapoints. ANN, artificial neural network; AAE, average absolute error.
Ceylan et al. 705
# 2008 NRC Canada
property inputs (volumetric properties) on |E*| predic-tions.
� It was found that the ANN model can provide a goodprediction of |E*| using only three input parameters(|Gb*|, VMA, and VFA).
AcknowledgmentsThe authors gratefully acknowledge Prof. Charles W.
Schwartz at the University of Maryland for providing the
latest |E*| database and for his valuable assistance in con-ducting this study. The contents of this paper reflect theviews of the authors who are responsible for the facts andaccuracy of the data presented within. This paper does notconstitute a standard, specification, or regulation.
ReferencesAdeli, H. 2001. Neural networks in civil engineering: 1989–2000.
Computer-Aided Civil and Infrastructure Engineering, 16(2):126–142.
Al-Khateeb, G., Shenoy, A., Gibson, N., and Harman, T. 2006. Anew simplistic model for dynamic modulus predictions of as-phalt paving mixtures. Journal of the Association of AsphaltPaving Technologists, 75: 1254–1293.
Andrei, D., Witczak, M.W., and Mirza, M.W. 1999. Developmentof a revised predictive model for the dynamic (Complex) modu-lus of asphalt mixtures. University of Maryland, College Park,Md. Inter Team Report NCHRP 1–37A.
Bari, J., and Witczak, M.W. 2006. Development of a new revisedversion of the Witczak E* predictive model for hot mix asphaltmixtures. Journal of the Association of Asphalt Paving Technol-ogists, 75: 381–423.
Bonaquist, R.F., Christensen, D.W., and Stump, W. 2003. Simpleperformance tester for Superpave mix design development andevaluations. Transportation Research Board of the National Aca-demies, Washington, D.C. NCHRP Report 513.
Ceylan, H., Gopalakrishnan, K., and Kim, S. 2007. Looking to thefuture: the next generation Hot-Mix Asphalt dynamic modulus
Fig. 7. Predicted versus observed |E*| using voids in mineral ag-gregate (VMA), voids filled with asphalt (VFA), and |Gb*| inputs.ANN, artificial neural network; AAE, average absolute error.
Table 4. Sensitivity analysis results for artificial neural network (ANN) models using 7500 laboratory test data points.
Input parameter Goodness-of-fit in arithmetic scale
E* predictive models Property Parameter R2 Se/Sy AAE (%)Hirsch (Christensen at al.
2003)Asphalt binder, volumetric, contact
factorVMA, VFA, |Gb*|,
Pc
0.23 0.88 50.6
ANN Hirsch (4–30–30–1) Asphalt binder, volumetric, contactfactor
VMA, VFA, |Gb*|,Pc
0.83 0.41 28.6
ANN H.1.1. (1–30–30–1) Asphalt binder only |Gb*| 0.68 0.57 43.0ANN H.1.2. (3–30–30–1) Without asphalt binder VMA, VFA, Pc 0.80 0.44 30.1ANN H.2.1. (2–30–30–1) Volumetric (VMA and VFA) VMA, VFA 0.00 1.09 240.5ANN H.2.2. (3–30–30–1) Without VFA VMA, |Gb*|, Pc 0.74 0.51 34.7ANN H.2.3. (3–30–30–1) Without VMA VFA, |Gb*|, Pc 0.73 0.52 34.2ANN H.3.1. (1–30–30–1) Contact factor only Pc 0.58 0.65 38.7ANN H.3.2. (3–30–30–1) Without contact factor VMA, VFA, |Gb*| 0.85 0.39 25.3
Table 3. Sensitivity analysis results for artificial neural network (ANN) models using 500 laboratory test data points.
Input parameter Goodness-of-fit in arithmetic scale
E* predictive models Property Parameter R2 Se/Sy AAE (%)Hirsch (Christensen at al.
2003)Asphalt binder, volumetric, contact
factorVMA, VFA, |Gb*|,
Pc
0.25 0.87 50.3
ANN Hirsch (4–30–30–1) Asphalt binder, volumetric, contactfactor
VMA, VFA, |Gb*|,Pc
0.77 0.48 31.5
ANN H.1.1. (1–30–30–1) Asphalt binder only |Gb*| 0.69 0.56 46.4ANN H.1.2. (3–30–30–1) Without asphalt binder VMA, VFA, Pc 0.80 0.45 32.0ANN H.2.1. (2–30–30–1) Volumetric (VMA and VFA) VMA, VFA 0.00 1.11 228.5ANN H.2.2. (3–30–30–1) Without VFA VMA, |Gb*|, Pc 0.74 0.51 34.7ANN H.2.3. (3–30–30–1) Without VMA VFA, |Gb*|, Pc 0.73 0.52 34.3ANN H.3.1. (1–30–30–1) Contact factor only Pc 0.60 0.63 36.6ANN H.3.2. (3–30–30–1) Without contact factor VMA, VFA, |Gb*| 0.85 0.39 26.2
706 Can. J. Civ. Eng. Vol. 35, 2008
# 2008 NRC Canada

prediction models. International Journal of Pavement Engineer-ing. In press.
Christensen, D.W., Pellinen, T., and Bonaquist, R.F. 2003. Hirschmodel for estimating the modulus of asphalt concrete. Journalof the Association of Asphalt Paving Technologists, 72: 97–121.
Dougherity, M. 1995. A review of neural networks applied to trans-port. Transportation Research, 3C: 247–260.
Flintsch, G.W. 2003. Soft computing applications in pavement andinfrastructure management: state-of-the-art. In Proceedings ofthe 82nd Annual Meeting of the Transportation Research Board,Washington, D.C., 12–16 January 2003. [CD-ROM]. NationalResearch Council, Washington, D.C.
Haykin, S. 1999. Neural networks: A comprehensive foundation.Prentice-Hall Inc., N.J.
Hirsch, T.J. 1961. The effects of the elastic moduli of the cementpaste matrix and aggregate on the modulus of elasticity of con-crete. Ph. D. thesis, Agricultural and Mechanical College ofTexas (Texas A & M), College Station, Tex.
Meier, R., and Tutumluer, E. 1998. Uses of artificial neural net-works in the mechanistic-empirical design of flexible pave-ments. In Proceedings of the International Workshop onArtificial Intelligence and Mathematical Methods in Pavementand Geomechanical Engineering Systems, Florida InternationalUniversity, Miami, Fla., 6–8 November 1998. Balkema, theNetherlands. pp. 1–12.
NCHRP. 2004. Guide for mechanistic-empirical design of new andrehabilitated pavement structures [online]. NCHRP 1–37 A Re-port. National Cooperative Highway Research Program, Trans-portation Research Board, Washington, D.C. Available from trb.org/mepdg [accessed 17 July 2008].
NCHRP. 2006a. Changes to the mechanistic–empirical pavementversion 0.900, July 2006. Report 1–40 D, Research Results Di-gest 308. National Cooperative Highway Research Program,Transportation Research Board, Washington, D.C.
NCHRP. 2006b. Independent review of the mechanistic–empiricalpavement design guide and software. Report NCHRP 1–40 A,Research Results Digest 307. National Cooperative HighwayResearch Program, Transportation Research Board, Washington,D.C.
Owusu-Ababio, S. 1998. Effect of neural network topology on flex-ible pavement cracking prediction. Computer-Aided Civil andInfrastructure Engineering, 13(5): 349–355.
Pellinen, T.K. 2001. Investigation of the use of dynamic modulusas an indicator of hot-mix asphalt performance. Ph.D. thesis,Arizona State University, Tempe, Ariz.
Schwartz, C.W. 2005. Evaluation of the Witczak dynamic modulusprediction model. In Proceedings of the 84th Annual Meeting ofthe Transportation Research Board, Washington, D.C., 9–13 Jan-uary 2005. [CD-ROM]. National Research Council, Washington,D.C.
TRB Circular. 1999. Use of artificial neural networks in geomecha-nical and pavement systems. Transportation Research Board,National Research Council, Washington, D.C. Report No. E-C012.
Tsoukalas, L.H., and Uhrig, R.E. 1997. Fuzzy and neuralapproaches in engineering. Wiley, New York.
Witczak, M.W. 2005. Simple performance tests: Summary of re-commended methods and database. National Cooperative High-way Research Program Report 547. Transportation ResearchBoard, Washington, D.C.
Witczak, M.W., and Fonseca, O.A. 1996. Revised predicted modelfor dynamic (complex) modulus of asphalt mixtures. Transporta-tion Research Record, 1540: 15–23.
Witczak, M.W., Kaloush, K., Pellinen, T., El-Basyouny, M., andQuintus, H.V. 2002. Simple performance test for Superpavemix design. National Cooperative Highway Research ProgramReport 465. Transportation Research Board, Washington, D.C.
Ceylan et al. 707
# 2008 NRC Canada

Related Documents











