ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT Rafael M. Bertolin * , Antônio B. Guimarães Neto * , Guilherme C. Barbosa * , Flávio J. Silvestre * * Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, 12228-900, Brazil Keywords: Adaptive control, flexible aircraft, MRAC, X-HALE Abstract The advantages of full-state feedback adaptive control in dealing with uncertainties of a flexible aircraft model are demonstrated with the use of model reference adaptive control. Design of an output-feedback system with an observer, based on the separation principle, is attempted. Differ- ences in both stability and performance charac- teristics of the full-state feedback and the output- feedback closed-loop systems demonstrate that further investigation is needed to design adaptive output-feedback controllers. 1 Introduction Flexible aircraft (FA) are caracterized by low or very low frequencies of their aeroelastic modes and, as a consequence, strong, dangerous and un- desirable coupling between the structural dynam- ics and the rigid-body flight dynamics may oc- cur. For example, the short-period mode of a very FA can become unstable as the dihedral angle in- creases [1]. A special class of FA that has motivated the scientific community in recent decades is known as High-Altitude Long-Endurance (HALE) air- craft. The mission profile of a HALE aircraft involves cruising at very high altitudes (above 20 km) and flying for weeks, months and even years [2]. It turns out that, due to the mission requirements, these aircraft may undergo actua- tor anomalies such as power surge in motors or structural damage in control surfaces. The described adversities give rise to a series of challenges in the flight control law design pro- cess [3] and may sometimes exceed the stability margins of the system. In such cases, traditional linear control techniques are no longer adequate. On the other hand, adaptive control is an appro- priate solution because it should be able to over- come all these adversities [4]. In this paper, the advantages of adaptive con- trol in dealing with uncertainties of a control sys- tem applied to flexible aircraft will be demon- strated for an experimental HALE aircraft, the X- HALE [5]. At first and assuming that all the system states are measurable, a linear baseline control system for velocity, altitude, sideslip and roll angle track- ing will be designed and afterwards augmented by a model reference adaptive control (MRAC) law [6]. A comparison between the two systems (with and without the MRAC augmentation) will be made by which the usefulness of the adaptive controller will become apparent. At a second moment and to address the state feedback problem, an attempt to design an ob- server based on the separation principle will be performed. 2 Problem Statement The FA flight dynamics under small disturbances around an equilibrium flight condition can be rep- resented by a class of multi-input multi-output (MIMO) linear time-invariant (LTI) uncertain 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULINGAPPLIED TO FLEXIBLE AIRCRAFT
Rafael M. Bertolin∗ , Antônio B. Guimarães Neto∗ , Guilherme C. Barbosa∗ , Flávio J. Silvestre∗∗Instituto Tecnológico de Aeronáutica, São José dos Campos, SP, 12228-900, Brazil
Keywords: Adaptive control, flexible aircraft, MRAC, X-HALE
Abstract
The advantages of full-state feedback adaptivecontrol in dealing with uncertainties of a flexibleaircraft model are demonstrated with the use ofmodel reference adaptive control. Design of anoutput-feedback system with an observer, basedon the separation principle, is attempted. Differ-ences in both stability and performance charac-teristics of the full-state feedback and the output-feedback closed-loop systems demonstrate thatfurther investigation is needed to design adaptiveoutput-feedback controllers.
1 Introduction
Flexible aircraft (FA) are caracterized by low orvery low frequencies of their aeroelastic modesand, as a consequence, strong, dangerous and un-desirable coupling between the structural dynam-ics and the rigid-body flight dynamics may oc-cur. For example, the short-period mode of a veryFA can become unstable as the dihedral angle in-creases [1].
A special class of FA that has motivated thescientific community in recent decades is knownas High-Altitude Long-Endurance (HALE) air-craft. The mission profile of a HALE aircraftinvolves cruising at very high altitudes (above20 km) and flying for weeks, months and evenyears [2]. It turns out that, due to the missionrequirements, these aircraft may undergo actua-tor anomalies such as power surge in motors orstructural damage in control surfaces.
The described adversities give rise to a series
of challenges in the flight control law design pro-cess [3] and may sometimes exceed the stabilitymargins of the system. In such cases, traditionallinear control techniques are no longer adequate.On the other hand, adaptive control is an appro-priate solution because it should be able to over-come all these adversities [4].
In this paper, the advantages of adaptive con-trol in dealing with uncertainties of a control sys-tem applied to flexible aircraft will be demon-strated for an experimental HALE aircraft, the X-HALE [5].
At first and assuming that all the system statesare measurable, a linear baseline control systemfor velocity, altitude, sideslip and roll angle track-ing will be designed and afterwards augmentedby a model reference adaptive control (MRAC)law [6]. A comparison between the two systems(with and without the MRAC augmentation) willbe made by which the usefulness of the adaptivecontroller will become apparent.
At a second moment and to address the statefeedback problem, an attempt to design an ob-server based on the separation principle will beperformed.
2 Problem Statement
The FA flight dynamics under small disturbancesaround an equilibrium flight condition can be rep-resented by a class of multi-input multi-output(MIMO) linear time-invariant (LTI) uncertain
1
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
systems in the following form:
ẋp = Apxp +BpΛ[u+ΘT Φ(xp)
](1)
yp = Cpxp +DpΛ[u+ΘT Φ(xp)
](2)
where xp ∈ Rnx corresponds to the state vec-tor, u ∈ Rnu are the control inputs, yp ∈ Rny isthe system output vector, composed of measure-ment outputs (ym ∈ Rnm) and tracking outputs(yt ∈ Rnt ) that are also measured, according to:[
ymyt
]︸ ︷︷ ︸
yp
=
[CmCt
]︸ ︷︷ ︸
Cp
xp+[
DmDt
]︸ ︷︷ ︸
Dp
Λ[u+ΘT Φ(xp)
](3)
The matrices Ap ∈ Rnx×nx , Bp ∈ Rnx×nu , Cm ∈Rnm×nx , Ct ∈ Rnt×nx , Dm ∈ Rnm×nu and Dt ∈Rnt×nu are assumed to be constant and known.This assumption corresponds to an ideal case. Inreality, several types of uncertainties exist in thedynamic model and such matrices are unknownand even time-variant.
Aiming at inserting more realism into theideal system, two kinds of parametric uncertain-ties are considered in Eqs. (1) and (2): an un-known constant multiplicative diagonal matrixΛ ∈ Rnu×nu with strictly positive diagonal ele-ments, to represent control actuator uncertainties,control effectiveness reduction and other controlfailures, damage or anomalies; and an additiveterm f(xp) = ΘT Φ(xp) that represents uncertain-ties present in Ap through the input channels,where f(·) : Rnx →Rnu , Θ ∈Rnx×nu is a matrix ofunknown constant parameters and Φ(xp)∈Rnx isa known regressor vector.
The control problem is to design u such thatyt tracks a bounded time-variant reference signalycmd in the presence of the aforementioned con-stant parametric uncertainties, whereas the rest ofthe signals in the closed-loop system as well astracking errors remain bounded.
3 Control Design
In face of the problem described in section 2, thecontrol signal u is selected as:
u = ubl +uad (4)
where ubl corresponds to a baseline linear con-troller and uad is an MRAC.
The reason for using this augmentation ap-proach (baseline + adaptive) stems from the factthat in most realistic applications a system al-ready has a baseline controller designed to op-erate under (or very close to) nominal condi-tions. When subjected to excessive disturbancesthis controller has its performance degraded. Insuch situations, the adaptive term acts to recoverthe desired performance (and ensure stability) bymeans of an online adjustment and in a real-timefashion [6].
This section presents the methodologies usedto design ubl and uad: section 3.1 shows the ar-chitecture and the design procedure of the base-line linear control system, which will also serveas reference model in the design of the adaptivecontrol law described in section 3.2.
In the following section ubl will be designedin the form of a full state feedback. This cor-responds to assume that all states are availablefor feedback. Evidently, this assumption consti-tutes a practical limitation of the designed controllaw because the states of a system usually cannotbe completely measured. However, the design ofoutput-feedback based controllers for nonlinearuncertain MIMO systems represents a challeng-ing problem [6]. Regarding adaptive controllers,these challenges represent several restrictive as-sumptions that the plant has to fulfill. Recent re-search [7, 8] relaxed these assumptions, but thecomplexity of the problem remains. To addressthis issue, an attempt to apply the separation prin-ciple [9] will be investigated in more detail in sec-tion 5.
Moreover, the pair (Ap,Bp) is assumed con-trollable and (Ap,Cm) observable. Controllabil-ity is necessary to ensure model matching condi-tions of the adaptive law, which will be explainedin section 3.2. Observality is necessary for theanalysis of section 5.
3.1 Baseline Control Design
For the purpose of tracking with null steady stateerror, the baseline control system corresponds to
2
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT
FA 𝒆𝒚 ⅆ𝒕
𝐊𝒙
--
-
+
𝐊𝑰𝒆𝒚𝑰(𝒕)𝒆𝒚(𝒕)𝒚𝒄𝒎ⅆ(𝒕) 𝒚𝒕(𝒕)𝒖𝒄(𝒕)
𝒖𝒔𝒂𝒔(𝒕)
𝒖𝒃𝒍(𝒕)
𝒙𝒑(𝒕)
Fig. 1 Baseline linear control system block diagram.
a linear quadratic regulator (LQR) with propor-tional and integral feedback connections (Figure1) [10].
Let ycmd ∈ Rnt be a bounded command thatyt must track and ey = yt− ycmd be the outputtracking error whose integral is denoted by eyI:
ėyI = ey = yt−ycmd (5)
From Eqs. (1), (3) and (5), the extendedopen-loop dynamics can be written as:[
ėyIẋp
]︸ ︷︷ ︸
ẋ
=
[0 Ct0 Ap
]︸ ︷︷ ︸
A
[eyIxp
]︸ ︷︷ ︸
x
+
[−I0
]︸ ︷︷ ︸
Bref
ycmd
+
[DtBp
]︸ ︷︷ ︸
B
Λ [u+ f(xp)] (6)
In terms of the tracking outputs:
yt︸︷︷︸y
=[
0 Ct]︸ ︷︷ ︸
C
[eyIxp
]+ Dt︸︷︷︸
D
Λ [u+ f(xp)]
(7)Equations (6) and (7) can be written com-
pactly as:
ẋ = Ax+BΛ [u+ f(xp)]+Brefycmd (8)y = Cx+DΛ [u+ f(xp)] (9)
The baseline control law is designed assum-ing that the system operates in the nominal con-ditions. It corresponds to set Λ = I and Θ = 0in the previous equations, resulting in the linearbaseline open-loop system:
ẋ = Ax+Bubl +Brefycmd (10)y = Cx+Dubl (11)
where:
ubl =−[
KI Kx]︸ ︷︷ ︸
KT
x =−KTx (12)
It is well-known [11] that the optimal LQRsolution is given by:
KT = R−1BTP (13)
with P being the unique symmetric positive-definite solution of the algebraic Riccati equation(ARE):
ATP+PA+Q−PBR−1BTP = 0 (14)
which is solved using the symmetric positive-denite design parameters Q and R.
Therefore, the baseline closed-loop system isgiven by:
ẋ =(
A−BKT)
x+Brefycmd (15)
y =(
C−DKT)
x (16)
3.2 MRAC Design
The adaptive control law that composes the to-tal control input (Eq. 4) is based on the MRACapproach [6, 12].
The baseline closed-loop dynamic given byEq. (15) corresponds to the desired behavior forthe actual closed-loop system. Therefore, the ref-erence model is assumed to be:
ẋref = Arefxref +Brefycmd (17)yref = Crefxref (18)
3
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
where:
Aref = A−BKT (19)Cref = C−DKT (20)
correspond to the model matching conditions andmust be ensured.
As previously stated, the adaptive term inEq. (4) acts to recover the desired behavior forthe actual closed-loop system when operating inthe presence of uncertainties or disturbances, andmust be designed in such a way that the dynamicsin Eq. (8) when under the effect of the input givenin Eq. (4) matches Eq. (17). So, substituting Eq.(4) into (8):
ẋ = Ax+BΛ[ubl +uad +ΘT Φ(xp)
]+Brefycmd
(21)From Eqs. (12), (19) and (21):
ẋ=Arefx+BΛ[uad+
KTu︷ ︸︸ ︷(I−Λ−1
)ubl+ΘT Φ(xp)
]+Brefycmd (22)
which can be rewritten as:
ẋ = Arefx+BΛ[uad + Θ̄T Φ̄(ubl,xp)
]+Brefycmd
(23)with:
Θ̄T =[
KTu ΘT]
(24)
Φ̄(ubl,xp) =[
ublΦ(xp)
](25)
Equivalently:
y = Crefx+DΛ[uad + Θ̄T Φ̄(ubl,xp)
](26)
Comparing Eqs. (23) and (26) with (17) and(18), respectively, it is evident that if the adaptivelaw uad is chosen to dominate the system uncer-tainties Θ̄T Φ̄(ubl,xp), x→ xref and consequentlyy→ yref. Therefore, proposing:
uad =− ˆ̄ΘT Φ̄(ubl,xp) (27)
where ˆ̄Θ ∈ R(nu+nx)×nu corresponds to the matrixof adaptive parameters, defining the matrix of pa-rameter estimation error as:
∆Θ̄ = ˆ̄Θ− Θ̄ (28)
and substituting Eq. (27) into Eqs. (23) and (26)results in:
ẋ = Arefx−BΛ∆Θ̄T Φ̄(ubl,xp)+Brefycmd (29)y = Crefx−DΛ∆Θ̄T Φ̄(ubl,xp) (30)
Introducing the state tracking error as:
e = x−xref (31)
the state tracking error dynamics can now be cal-culated by subtracting the reference model dy-namics in Eq. (17) from the actual closed-loopextended system in Eq. (29):
ė = Arefe−BΛ∆Θ̄T Φ̄(ubl,xp) (32)
It is possible to demonstrate using Lya-punov’s direct method (Ref. [6], chapter 10) that,if the adaptive law is chosen in the form:
˙̄̂Θ = ΓΘ̄Φ̄(ubl,xp)eT PrefB (33)
then the closed-loop state tracking error dynam-ics in Eq. (32) is globally asymptotically sta-ble. In other words, the closed-loop system fromEq. (29) globally asymptotically tracks the ref-erence model from Eq. (17), as t → ∞ and forany bounded command ycmd. At the same time,y (Eq. (30)) also track ycmd with bounded errors.
In Eq. (33), ΓΘ̄ = ΓTΘ̄ > 0 represents ratesof adaptation and Pref = PrefT > 0 is the uniquesymmetric positive-definite solution of the alge-braic Lyapunov equation:
ArefT Pref +PrefAref =−Qref (34)
where Qref = QrefT > 0 is a matrix of design pa-rameters.
4 Numerical Application
This section presents a numerical application ofthe formulation developed in the previous sec-tion. Section 4.1 introduces the flexible aircraftconsidered here, the X-HALE. Section 4.2 ad-dresses the model order reduction for control pur-pose. Lastly, section 4.3 describes the design pro-cedure and the simulation cases analyzed.
4
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT
4.1 The X-HALE Aircraft
The X-HALE is a radio-controlled unmanned ex-perimental airplane developed to be a test plat-form to collect aeroelastic data coupled with theaircraft rigid-body motion, in order to validatemathematical formulations of flexible-aircraftflight dynamics as well as control system designtechniques [5].
It can be configured to fly as a four-, six- oreight-meter-span configuration. In all of them,the outer panels of the wing have 10 degree di-hedral angle. A central stabilizer is used witha flipping mode (horizontal or vertical position)to increase or decrease lateral-directional stabil-ity of the aircraft. In this work, the four-meter-span configuration is considered, only. Figure 2illustrates the aircraft.
elevators
motors
aileron
Fig. 2 Four-meter-span, vertical-central-tail X-HALE configuration.
The mathematical formulation employed tomodel the X-HALE flight dynamics was devel-oped by Guimarães Neto [13].
The state variables of the full nonlinear modelare given by:
xfull =[V α q θ H x β φ p r ψ y · · ·
λrbT ηT η̇T ληT]T (35)
The model includes the kinematic equationsin the inertial reference frame, for all six degreesof freedom: displacements in the x and y direc-tions, altitude H and roll, pitch and yaw angles(φ, θ and ψ, respectively). Furthermore, the ve-locity V , the angle of attack α, the sideslip angle
β, as well as the angular rates p, q and r also havetheir corresponding equations of motion. A par-ticular feature of the model is the modeling of thestructural dynamics using modal amplitudes andtheir time-derivatives (η and η̇). Modes of vi-bration with frequencies up to 25 Hz are retainedin the model. Aerodynamic lag states arise dueto rigid-body and control-surface dynamics (λrb)and due to the aeroelastic dynamics (λη). There-fore, the full model is composed of 210 states: 12from rigid body motion plus 63 from rigid-bodyand control-surface aerodynamic lag states plus30 from aeroelastic states plus 105 from aeroe-lastic aerodynamic lag states.
The four-meter-span aircraft is composed oftwo boom-mounted elevators, two ailerons andthree motors. All these actuators can be inde-pendently controlled. However, to accomplishaircraft control in a more conventional way, thelongitudinal attitude is controlled by the eleva-tors (δe), the rolling motion is controlled by theailerons (δa), whereas the yawing motion is con-trolled using differential thrust of the externalmotors (δr). The global thrust level of the threemotors responds to the throttle command (δt).Then, the input vector can be rewritten as:
u =[
δt δe δa δr]T (36)
The output vector yp ∈ R90×1 comprisesmodel outputs such as displacements and atti-tudes, linear and angular velocities, load factors,at different points of the wing and close to thecenter of gravity (CG) of the aircraft. The mea-surements made possible by the aircraft sensorsare a subset of the model outputs.
The full nonlinear model may be linearizedaround different equilibrium conditions. In thispaper, all subsequent development is performedconsidering linearized models around the straightand level flight condition with velocity of 14 m/sand altitude of 650 meters, ISA+10. Moreover,the full linear model (around such flight condi-tion) of the vertical-central-tail configuration air-craft is assumed as the nominal open-loop model.
5
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
10-4 10-3 10-2 10-1 100 101 102
Frequency [Hz]
-20
-15
-10
-5
0
5
10
15
20
25
30
Singu
larValue[dB]
σmin
10-4 10-3 10-2 10-1 100 101 102
Frequency [Hz]
30
40
50
60
70
80
90
Singu
larValue[dB]
σmax
FullReduced
Fig. 3 Comparison between the maximum and minimum singular values of the transfer function matricesfor both full and reduced models.
4.2 Model Reduction
The high order of the X-HALE model is a chal-lenge to most of the control techniques and there-fore a state-space reduced-order model is appro-priate. For this purpose, a residualization tech-nique is applied to all the aerodynamic lag statesof the nominal model [13]. The resulting reducedlinear model (Ap, Bp, Cp, Dp) comprises ninerigid-body states of the full model (discarding ig-norable variables x, y and ψ) as well as the aeroe-lastic ones:
xp =[
V α q θ H β φ p r ηT η̇T]T (37)
totalizing thirty-nine states. Fig. 3 examinesthe maximum and minimum singular values ofthe MIMO transfer function matrix for both fulland reduced models. It is notorious that the re-duced model preserves sufficient characteristicsof the full one. This makes sense, since the aero-dynamic lag states have a greater impact on thephase of the system.
4.3 Simulation Results
In order to illustrate the advantages of the MRACaugmentation of a baseline linear controller, acontrol system for velocity, altitude, sideslip androll angle tracking is considered.
From the reduced linear model, the first stepis to obtain the augmented open-loop dynamics,according to Eq. (10), including the integral of
the following output tracking error:
ey = yt−ycmd =
VHφβ
−
VcmdHcmdφcmdβcmd
(38)The baseline linear controller is then de-
signed from Eqs. (12), (13) and (14), with theappropriate choices for the ARE parameters:
Q =[
I4×4 04×39039×4 10−3I39×39
](39)
R = diag(25, 0.1, 0.1, 25) (40)
where diag(•) is a diagonal matrix for which themain diagonal elements are given by •.
The next step is to design the MRAC system(from Eqs. (34) and (33)) in order to recover thedesired closed-loop performance given by Eqs.(17) and (18). After some iterations focusing ona fast tracking with reduced transient oscillations,the following parameters were selected:
Qref = 10−3 I4×4 04×9 04×3009×4 10−2I9×9 09×30
030×4 030×9 10−1I30×30
(41)
ΓΘ̄ = 5∗10−3[
I4×4 04×39039×4 I39×39
](42)
with Φ(xp) = xp being the choice for the regres-sion vector of Eq. (25) [6].
6
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT
0 10 20 30 40 50 60 70
Time [s]
-1.5
-1
-0.5
0
0.5
1
1.5
∆V
[m/s]
CommandReferenceBaselineAdaptive
0 10 20 30 40 50 60 70
Time [s]
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
∆H
[m]
0 10 20 30 40 50 60 70
Time [s]
-20
-15
-10
-5
0
5
10
15
∆φ[◦]
0 10 20 30 40 50 60 70
Time [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
∆β[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
∆δt[-]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δe[◦]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δa[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
∆δr[-]
0 10 20 30 40 50 60 70
Time [s]
0
2
4
6
8
10
12
14
16
18
‖e‖
Fig. 4 Simulation results of the case (i) (vertical-central-tail aircraft in nominal condition).
To validate the designed controller as well asto demonstrate the potentiality of the adaptivecontrol, three cases are analyzed: (i) consider-ing the vertical-central-tail aircraft operating inthe nominal condition, that is, straight and levelflight at 14 m/s and 650 meters; (ii) consideringthe horizontal-central-tail aircraft also flying at14 m/s and 650 meters, however after a damageof the right motor; (iii) the same flight conditionas in (ii) but with the residual effectiveness of theright motor degraded.
Some aspects of the previous cases deserveattention: (1) in all of them the simulations areperformed using the respective full linear model.As a consequence, the effects of the aerodynamiclag states are treated as model parametric un-certainties; (2) the simulations consider the dy-namics as well as the saturation of the actuators,
whereas the design was carried out without both.All actuator dynamics are first-order functions,with time constant of 75 ms for the control sur-faces and 150 ms for the motors. For the controlsurfaces, the saturation magnitude is ±8 deg, forthe rudder ±30% of the throttle command andfor the throtlle [30%,−70%]. These limits cor-respond to the maximum possible perturbationsaround the equilibrium condition; (3) about thefault tolerance test of cases (ii) and (iii), it wasassumed that, to represent some sort of damageto the right motor, its maximum throttle com-mand was limited to 50%, and therefore the air-craft assumed a new equilibrium condition. Thisrepresents a new set of matrices Ap, Bp, Cp andDp; (4) another uncertainty present in this new setof matrices corresponds to the horizontal-central-tail configuration of the aircraft; (5) lastly, in (iii),
7
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
0 10 20 30 40 50 60 70
Time [s]
-1.5
-1
-0.5
0
0.5
1
1.5
∆V
[m/s]
CommandReferenceBaselineAdaptive
0 10 20 30 40 50 60 70
Time [s]
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
∆H
[m]
0 10 20 30 40 50 60 70
Time [s]
-20
-15
-10
-5
0
5
10
15
∆φ[◦]
0 10 20 30 40 50 60 70
Time [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
∆β[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
∆δt[-]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δe[◦]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δa[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
∆δr[-]
0 10 20 30 40 50 60 70
Time [s]
0
2
4
6
8
10
12
14
16
18
‖e‖
Fig. 5 Simulation results of the case (ii) (horizontal-central-tail aircraft after a right motor damage).
the residual effectiveness of the right motor is de-graded by a factor Λ = 0.85.
The simulation results are presented in Fig-ures 4 to 7, where the curves called Referencecorrespond to the reference model response, theBaseline curves are the response of the closed-loop system considering u = ubl (just the base-line control law) and the curves called Adaptiveare the response of the closed-loop system con-sidering u = ubl +uad (baseline + adaptive con-trol laws).
It is desired to track velocity (Vcmd) and rollangle (φcmd) commands, while the commandedaltitude (Hcmd) and sideslip (βcmd) are kept con-stant and equal to zero. An initial condition ofβ(0) = 3◦ is considered.
Figure 4 shows the simulation results of case(i). In an ideal case, the reference, baseline and
adaptive curves must be identical, once with-out uncertainties the reference model is exactlythe baseline linear control system, and thereforethe term uad must remain null. It turns outthat the simulation model for this case containssome parametric uncertainties, and this is prob-ably the reason for the mismatch between thecurves. Even so, both (baseline and adaptive)perform very similarly to the reference model.Regarding the control signals, it is observed thatall of them are feasible, that is, they operate withmagnitudes smaller than the stipulated limits andpresenting feasible rates. Lastly, is is possibleto see that the 2-norm of the state tracking errortends asymptotically to zero, as expected.
Figure 5 shows the simulation results of case(ii). For this case, it is observed that the uncer-tainties of the model have a significant influence.
8
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT
0 10 20 30 40 50 60 70
Time [s]
-1.5
-1
-0.5
0
0.5
1
1.5
∆V
[m/s]
CommandReferenceBaselineAdaptive
0 10 20 30 40 50 60 70
Time [s]
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
∆H
[m]
0 10 20 30 40 50 60 70
Time [s]
-20
-15
-10
-5
0
5
10
15
∆φ[◦]
0 10 20 30 40 50 60 70
Time [s]
-5
-4
-3
-2
-1
0
1
2
3
4
5
∆β[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
∆δt[-]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δe[◦]
0 10 20 30 40 50 60 70
Time [s]
-10
-8
-6
-4
-2
0
2
4
6
8
10
∆δa[◦]
0 10 20 30 40 50 60 70
Time [s]
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
∆δr[-]
0 10 20 30 40 50 60 70
Time [s]
0
2
4
6
8
10
12
14
16
18
‖e‖
Fig. 6 Simulation results of the case (iii) (horizontal-central-tail aircraft after a right motor damage andresidual effectiveness degradation).
Although the baseline system still performs sat-isfactorily, its response is clearly compromised.Among all the uncertainties considered, the fail-ure of the right motor is the most critical, and itsimpacts are evident, as clearly seen in the evo-lution of β and δr. More differential thrust isneeded to compensate the asymmetric failure. Adirect consequence of the right motor damage isthe worsening of the β regulation. On the otherhand, the adaptive controller performs much bet-ter and indicates its usefulness in dealing withproblems of this nature. Once more the 2-normof the state tracking error tends asymptotically tozero.
Case (iii) is certainly the most interesting ofall, and the simulation results are presented inFigure 6. In addition to preserving all the para-
metric uncertainties of case (ii), the right motorhas its residual effectiveness degraded by a mul-tiplicative factor of 0.85. In this case the baselinecontrol system diverges. However, the MRACnot only ensures stability of the closed-loop sys-tem, but also very good performance, with feasi-ble control signals. Only β presents some oscil-lations in the initial instants. The 2-norm of thestate tracking error remains converging to zero.Figure 7 presents the temporal evolution of the 2-norm of the adaptive gain vectors with respect toeach one of the control inputs. Note that with theasymptotic convergence to zero of the state track-ing error 2-norm, the 2-norm of the adaptive gainvectors tends to a steady state value.
9
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
0 20 40 60 80
Time [s]
0
2
4‖K
∆δt‖
×10-3
0 20 40 60 80
Time [s]
0
2
4
6
‖K∆δe‖
×10-4
0 20 40 60 80
Time [s]
0
1
2
3
‖K∆δa‖
×10-3
0 20 40 60 80
Time [s]
0
0.02
0.04
‖K∆δr‖
Fig. 7 Temporal evolution of the 2-norm of theadaptive gain vectors with respect to each of thecontrol channels. Results of case (iii).
5 Observer-Based Adaptive Controllers
In linear control theory, a very well-establishedapproach to deal with the practical problem of de-signing an output-feedback controller is the sep-aration principle, according to which a full-state-variable feedback can be coupled to an observerthat provides state estimates based on a reducednumber of measurements [9]. There are evenworks where such an approach was applied to thecontrol of flexible aircraft [14].
The question that arises is whether the appli-cation of such principle together with adaptivecontrol technique remains valid. In general, theseparation principle does not exist for nonlinearcontrol systems [15]. Some works on the sepa-ration principle in adaptive control can be cited[16, 17]. However no global stability results arereported. In Ref. [15] an alternative and muchmore promising approach is proposed in whichthe author makes use of a closed-loop referencemodel as an observer and ensures global stabilityunder certain assumptions.
In this section, an attempt is made to employthe separation principle together with the MRAC.The observer here proposed is designed accord-ing to Ref. [14] and the detailed theory about thisapproach can be found in Ref. [9].
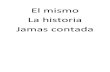
0 5 10 15 20 25 30
Time [s]
-0.04
-0.02
0
0.02
0.04
0.06
∆η1[-] Full
Observed
0 5 10 15 20 25 30
Time [s]
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
∆η5[-]
0 5 10 15 20 25 30
Time [s]
-6
-4
-2
0
2
4
6
∆η6[-]
×10-3
Fig. 8 Observer response versus full-order modelfor coupled sinusoidal elevator (0.1 to 15 Hz) andaileron (0.1 to 10 Hz) commands.
To observe the states of the reduced model(section 4.2), acceleration measurements in thethree axes as well as angular rates (p, q andr) are taken from three different points of theaircraft: left and right wing tips and close toCG. In addition, strain gauges located in boththe right and left wing are also considered. Ob-servability of the system considering such mea-surements was checked. Choosing weightingmatrices 10−3I39×39 for the observer states and102I27×27 for the measurements, the observergain matrix L is calculated.
Figure 8 shows the comparison betweenthe observer response and the full-order linearmodel, for coupled sinusoidal elevator (0.1 to 15Hz) and aileron (0.1 to 10 Hz) commands. Thefirst, fifth and sixth aeroelastic states are pre-sented. They correspond to the first torsion andbending modes. It is noticed that the observergenerates good estimates of the states. The case(ii) simulation results considering now the ob-server in the loop are presented in Figure 9.
Regarding the MRAC law, the closed-loopsystem remains stable but has its performancemuch degraded. On the other hand, the base-line controller that, in case (ii), assuming full
10
-
ADAPTIVE OUTPUT-FEEDBACK GAIN SCHEDULING APPLIED TO FLEXIBLE AIRCRAFT
state feedback, is stable and presents good per-formance, is unstable for the case in which theobserver is considered.
0 50 100 150
Time [s]
-1
0
1
∆V
[m/s]
0 50 100 150
Time [s]
-2
-1
0
1
2
∆H
[m]
0 50 100 150
Time [s]
-20
-10
0
10
∆φ[◦]
CommandReferenceBaselineAdaptive
0 50 100 150
Time [s]
-5
0
5
∆β[◦]
Fig. 9 Simulation results of the case (ii), but con-sidering the observer in the loop.
6 Conclusions
This paper aimed at demonstrating the advan-tages of the MRAC in dealing with uncertaintiesof a control system applied to the X-HALE air-craft. A comparison between the linear baselinecontrol system and the MRAC augmentation wasperformed in which the usefulness of the adaptivecontroller is evident.
A discussion on the use of the separationprinciple with the MRAC was presented. It hasbeen verified that the observer inclusion is able todestabilize the baseline control system subject touncertainties, whereas the adaptive one ensuresstability but with degraded performance.
It is clear that further investigation is neces-sary to develop an adaptive output-feedback con-trol system that is both stable and of performancecomparable to that of full-state feedback.
Contact Author Email Address
Acknowledgement
This work has been funded by FINEP andEMBRAER under the research project Ad-vanced Studies in Flight Physics, contract num-ber 01.14.0185.00.
Copyright Statement
The authors confirm that they, and/or their companyor organization, hold copyright on all of the origi-nal material included in this paper. The authors alsoconfirm that they have obtained permission, from thecopyright holder of any third party material includedin this paper, to publish it as part of their paper. Theauthors confirm that they give permission, or have ob-tained permission from the copyright holder of thispaper, for the publication and distribution of this pa-per as part of the ICAS proceedings or as individualoff-prints from the proceedings.
References
[1] Gibson, T., Annaswamy, A. M. and Lavretsky,E. Modeling for control of very flexible aircraft.In: AIAA Guidance, Navigation, and ControlConference, p. 6202, 2011.
[2] D’ Oliveira, F. A., Melo, F. C. L. and Devezas,T. C. High-altitude platforms-present situationand technology trends. Journal of AerospaceTechnology and Management, v. 8, n. 3, pp. 249-262, 2016.
[3] Gadient, R., Lavretsky, E. and Wise, K. A. Veryflexible aircraft control challenge problem. In:AIAA Guidance, Navigation, and Control Con-ference, p. 4973, 2012.
[4] Zheng, Q. and Annaswamy, A. M. Adaptiveoutput-feedback control with closed-loop refer-ence models for very flexible aircraft. Journalof Guidance, Control, and Dynamics, v. 39, n.4, pp. 873-888, 2015
[5] Cesnik, C. E. S., Senatore, P. J., Su, W., Atkins,E. M. and Shearer, C. M. X-HALE: a very flexi-ble unmanned aerial vehicle for nonlinear aeroe-lastic tests. AIAA Journal, v. 50, n. 12, 2012.
[6] Lavretsky, E. and Wise, K. A. Robust and Adap-tive Control. Advanced Textbooks in Control
11
-
BERTOLIN, R. M. , GUIMARÃES NETO. A. B. , BARBOSA, G. C. , SILVESTRE, F. J.
and Signal Processing, DOI: 10.1007/978-1-4471-4396-3_1, Springer, 2013.
[7] Zheng, Q., Annaswamy, A. M. and Lavretsky,E. Adaptive output-feedback control for relativedegree two systems based on closed-loop refer-ence models. In: IEEE Annual Conference onDecision and Control, pp. 7598-7603, 2015.
[8] Zheng, Q., Annaswamy, A. M. and Lavretsky,E. Adaptive output-feedback control for a classof multi-input-multi-output plants with applica-tions to very flexible aircraft. In: IEEE Ameri-can Control Conference, 2016.
[9] Stevens, B. L. and Lewis, F. L. Aircraft Controland Simulation. 2nd edition, Wiley-India, 2010.
[10] Franklin, G. F., Powell, J. D. and Emami-Naeini, A. Feedback Control of Dynamic Sys-tems. 6th edition, Prentice Hall, 2009.
[11] Anderson, B. D. O. and Moore, J. B. OptimalControl, Linear Quadratic Methods. Mineola,2007.
[12] Narendra, K. S. and Annaswamy, A. M. StableAdaptive Systems. Courier Corporation, 2012.
[13] Guimarães Neto, A. B. Flight dynamics of flex-ible aircraft using general body axes: a theo-retical and computational study. Instituto Tec-nológico de Aeronáutica. São José dos Campos:ITA, 2014.
[14] Silvestre, F. J., Guimarães Neto, A. B., Bertolin,R. M., Silva, R. G. and Paglione, P. Aircraft con-trol based on flexible aircraft dynamics. Journalof Aircraft, v. 54, n. 1, pp. 262-271, 2017.
[15] Gibson, T., Zheng, Q., Annaswamy, A. M. andLavretsky, E. Adaptive Output feedback basedon closed-loop reference model. IEEE Transac-tions on Automatic Control, v. 60, n. 10, pp.2728-2733, 2015.
[16] Khalil, H. K. Adaptive Output feedback con-trol of nonlinear systems represented by input-output models. IEEE Transactions on AutomaticControl, v. 41, n. 2, pp. 177-188, 1996.
[17] Atassi, A. N. and Khalil, H. K. A separationprinciple for the control of a class of nonlinearsystems. IEEE Transactions on Automatic Con-trol, v. 46, n. 5, pp. 742-746, 2001.
12
IntroductionProblem StatementControl DesignBaseline Control DesignMRAC Design
Numerical ApplicationThe X-HALE AircraftModel ReductionSimulation Results
Observer-Based Adaptive ControllersConclusions
Related Documents





![Adaptive control of turbulence intensity is accelerated by ......trol the turbulence intensity in a closed-loop wind tunnel (figure 1a) [47]. Using a hotwire anemometer in the test](https://static.cupdf.com/doc/110x72/5f7f9df6676fec2ec8664e3d/adaptive-control-of-turbulence-intensity-is-accelerated-by-trol-the-turbulence.jpg)