Adaptive Observer Design for the Bottomhole Pressure of a Managed Pressure Drilling System CDC - Cancun Øyvind Nistad Stamnes, Jing Zhou, Glenn-Ole Kaasa, Ole Morten Aamo Department of Engineering Cybernetics 10 Dec. 2008 www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 1/15

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Adaptive Observer Design for the BottomholePressure of a Managed Pressure Drilling SystemCDC - Cancun
Øyvind Nistad Stamnes, Jing Zhou,Glenn-Ole Kaasa, Ole Morten AamoDepartment of Engineering Cybernetics
10 Dec. 2008
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 1/15

2
Outline
— Drilling 101— System Model— Observer Design— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump offConventional, pump on
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15

2
Outline
— Drilling 101
— System Model— Observer Design— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump offConventional, pump on
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15
2
Outline
— Drilling 101— System Model
— Observer Design— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump offConventional, pump on
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15
2
Outline
— Drilling 101— System Model— Observer Design
— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump off
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15

2
Outline
— Drilling 101— System Model— Observer Design
— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump offConventional, pump on
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15

2
Outline
— Drilling 101— System Model— Observer Design— Simulation Results
Depth
Pressure
Sea bed
Conventional, pump offConventional, pump on
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 2/15
3
Drilling 101
— Conventional Drilling— Managed Pressure Drilling (MPD)
Pann = Pfric + Phydro
+ Pchoke
Pann = Annular pressurePfric = Friction pressure
Phydro = Hydrostatic pressure
Pchoke = Pressure upstream choke
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 3/15

3
Drilling 101
— Conventional Drilling
— Managed Pressure Drilling (MPD)
Pann = Pfric + Phydro
+ Pchoke
Pann = Annular pressurePfric = Friction pressure
Phydro = Hydrostatic pressure
Pchoke = Pressure upstream choke
Depth
Pressure
Conventional, pump onConventional, pump off
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 3/15

3
Drilling 101
— Conventional Drilling
— Managed Pressure Drilling (MPD)
Pann = Pfric + Phydro
+ Pchoke
Pann = Annular pressurePfric = Friction pressure
Phydro = Hydrostatic pressure
Pchoke = Pressure upstream choke
Depth
Pressure
Conventional, pump onConventional, pump off
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 3/15

3
Drilling 101
— Conventional Drilling— Managed Pressure Drilling (MPD)
Pann = Pfric + Phydro + Pchoke
Pann = Annular pressurePfric = Friction pressure
Phydro = Hydrostatic pressurePchoke = Pressure upstream choke
Depth
Pressure
Conventional, pump onConventional, pump offMPD, pump off
Pchoke
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 3/15

3
Drilling 101
— Conventional Drilling— Managed Pressure Drilling (MPD)
Pann = Pfric + Phydro + Pchoke
Pann = Annular pressurePfric = Friction pressure
Phydro = Hydrostatic pressurePchoke = Pressure upstream choke
Depth
Pressure
Conventional, pump onConventional, pump offMPD, pump off
Pchoke
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 3/15

4
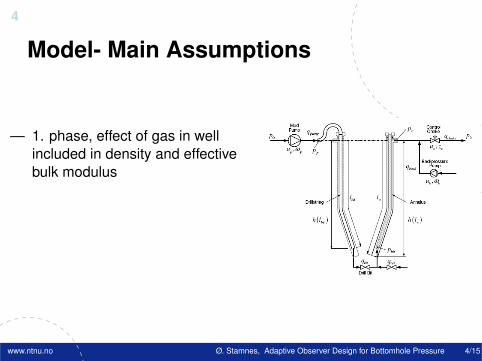
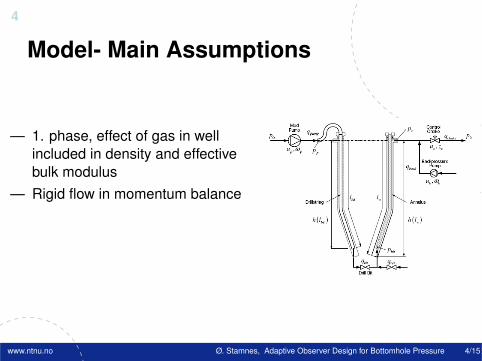
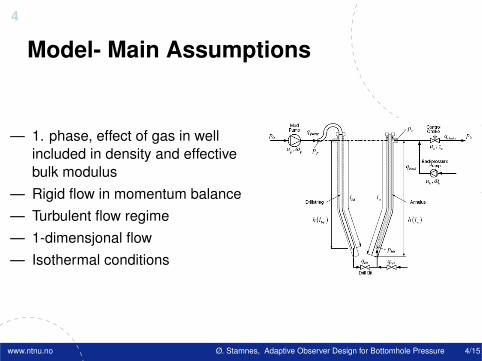
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance— Turbulent flow regime— 1-dimensjonal flow— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15
4
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance— Turbulent flow regime— 1-dimensjonal flow— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15
4
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance
— Turbulent flow regime— 1-dimensjonal flow— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15

4
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance— Turbulent flow regime
— 1-dimensjonal flow— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15

4
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance— Turbulent flow regime— 1-dimensjonal flow
— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15
4
Model- Main Assumptions
— 1. phase, effect of gas in wellincluded in density and effectivebulk modulus
— Rigid flow in momentum balance— Turbulent flow regime— 1-dimensjonal flow— Isothermal conditions
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 4/15

5
Model
Va
βapc + Va = qbit + qback + qres − qchoke
Vd
βdpp = qpump − qbit
Mqbit = pp − pc − (Fd + Fa)|qbit |qbit
+ (ρd − ρa)ghbit
pbit =
{pc + Maqbit + Fa|qbit |qbit + ρaghbitpp + Md qbit − Fd |qbit |qbit + ρdghbit
p=[bar], V=[m3], q=[
m3
s
]
β=[bar], h=[m], g=9.81[m
s2
]
F=friction factor, ρ=[
kgm3
]
M = Md + Ma
Md = ρd∫ lbit
01
Ad (x)dx ,
Ma = ρa∫ lw
01
Aa(x)dx
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 5/15

5
Model
Va
βapc + Va = qbit + qback + qres − qchoke
Vd
βdpp = qpump − qbit
Mqbit = pp − pc − (Fd + Fa)|qbit |qbit
+ (ρd − ρa)ghbit
pbit =
{pc + Maqbit + Fa|qbit |qbit + ρaghbitpp + Md qbit − Fd |qbit |qbit + ρdghbit
p=[bar], V=[m3], q=[
m3
s
]
β=[bar], h=[m], g=9.81[m
s2
]
F=friction factor, ρ=[
kgm3
]
M = Md + Ma
Md = ρd∫ lbit
01
Ad (x)dx ,
Ma = ρa∫ lw
01
Aa(x)dx
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 5/15

5
Model
Va
βapc + Va = qbit + qback + qres − qchoke
Vd
βdpp = qpump − qbit
Mqbit = pp − pc − (Fd + Fa)|qbit |qbit
+ (ρd − ρa)ghbit
pbit =
{pc + Maqbit + Fa|qbit |qbit + ρaghbitpp + Md qbit − Fd |qbit |qbit + ρdghbit
p=[bar], V=[m3], q=[
m3
s
]
β=[bar], h=[m], g=9.81[m
s2
]
F=friction factor, ρ=[
kgm3
]
M = Md + Ma
Md = ρd∫ lbit
01
Ad (x)dx ,
Ma = ρa∫ lw
01
Aa(x)dx
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 5/15

5
Model
Va
βapc + Va = qbit + qback + qres − qchoke
Vd
βdpp = qpump − qbit
Mqbit = pp − pc − (Fd + Fa)|qbit |qbit
+ (ρd − ρa)ghbit
pbit =
{pc + Maqbit + Fa|qbit |qbit + ρaghbitpp + Md qbit − Fd |qbit |qbit + ρdghbit
p=[bar], V=[m3], q=[
m3
s
]
β=[bar], h=[m], g=9.81[m
s2
]
F=friction factor, ρ=[
kgm3
]
M = Md + Ma
Md = ρd∫ lbit
01
Ad (x)dx ,
Ma = ρa∫ lw
01
Aa(x)dx
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 5/15

5
Model
Va
βapc + Va = qbit + qback + qres − qchoke
Vd
βdpp = qpump − qbit
Mqbit = pp − pc − (Fd + Fa)|qbit |qbit
+ (ρd − ρa)ghbit
pbit =
{pc + Maqbit + Fa|qbit |qbit + ρaghbitpp + Md qbit − Fd |qbit |qbit + ρdghbit
p=[bar], V=[m3], q=[
m3
s
]
β=[bar], h=[m], g=9.81[m
s2
]
F=friction factor, ρ=[
kgm3
]
M = Md + Ma
Md = ρd∫ lbit
01
Ad (x)dx ,
Ma = ρa∫ lw
01
Aa(x)dx
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 5/15

6
Model- Verification
0 500 1000 1500240
260
280
300
320
340
s
barg
pbit
pbitsim
0 500 1000 1500−50
0
50
100
150
s
barg
pp
pc
ppsim
pcsim
Figure: Model fitted to WeMod
0 0.5 1 1.5 2 2.550
100
150
200
250
barg
pbitpppbitf it
ppf it
0 0.5 1 1.5 2 2.50
10
20
30
hr
pc(barg)
up( liters )
Figure: Model fitted to data
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 6/15

6
Model- Verification
0 500 1000 1500240
260
280
300
320
340
s
barg
pbit
pbitsim
0 500 1000 1500−50
0
50
100
150
s
barg
pp
pc
ppsim
pcsim
Figure: Model fitted to WeMod
0 0.5 1 1.5 2 2.550
100
150
200
250
barg
pbitpppbitf it
ppf it
0 0.5 1 1.5 2 2.50
10
20
30
hr
pc(barg)
up( liters )
Figure: Model fitted to data
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 6/15

6
Model- Verification
0 500 1000 1500240
260
280
300
320
340
s
barg
pbit
pbitsim
0 500 1000 1500−50
0
50
100
150
s
barg
pp
pc
ppsim
pcsim
Figure: Model fitted to WeMod
0 0.5 1 1.5 2 2.550
100
150
200
250
barg
pbitpppbitf it
ppf it
0 0.5 1 1.5 2 2.50
10
20
30
hr
pc(barg)
up( liters )
Figure: Model fitted to data
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 6/15
7
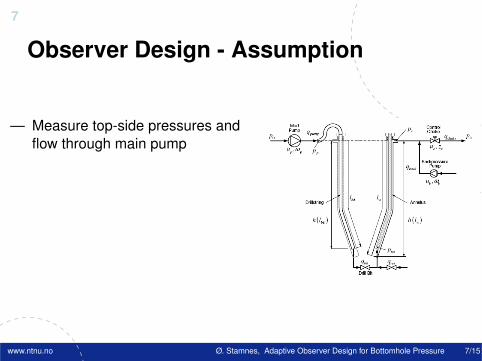
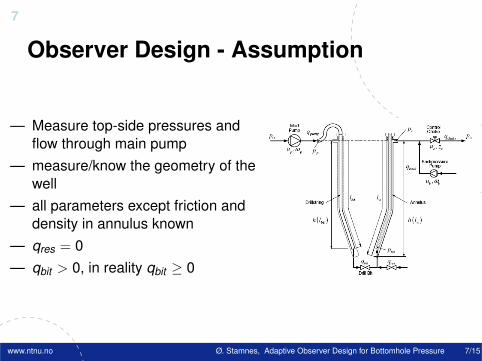
Observer Design - Assumption
— Measure top-side pressures andflow through main pump
— measure/know the geometry of thewell
— all parameters except friction anddensity in annulus known
— qres = 0— qbit > 0, in reality qbit ≥ 0
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 7/15

7
Observer Design - Assumption
— Measure top-side pressures andflow through main pump
— measure/know the geometry of thewell
— all parameters except friction anddensity in annulus known
— qres = 0— qbit > 0, in reality qbit ≥ 0
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 7/15

7
Observer Design - Assumption
— Measure top-side pressures andflow through main pump
— measure/know the geometry of thewell
— all parameters except friction anddensity in annulus known
— qres = 0— qbit > 0, in reality qbit ≥ 0
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 7/15

7
Observer Design - Assumption
— Measure top-side pressures andflow through main pump
— measure/know the geometry of thewell
— all parameters except friction anddensity in annulus known
— qres = 0
— qbit > 0, in reality qbit ≥ 0
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 7/15
7
Observer Design - Assumption
— Measure top-side pressures andflow through main pump
— measure/know the geometry of thewell
— all parameters except friction anddensity in annulus known
— qres = 0— qbit > 0, in reality qbit ≥ 0
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 7/15

8
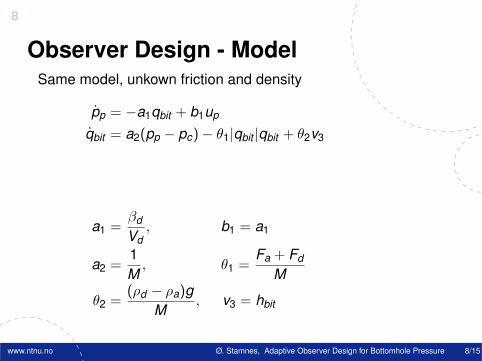
Observer Design - ModelSame model, unkown friction and density
pp = −a1qbit + b1up
qbit = a2(pp − pc)− θ1|qbit |qbit + θ2v3
pbit = pc + Maqbit + (Mθ1 − Fd )q2bit + (ρd −
Mgθ2)hbit
a1 =βd
Vd, b1 = a1
a2 =1M, θ1 =
Fa + Fd
M
θ2 =(ρd − ρa)g
M, v3 = hbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 8/15

8
Observer Design - ModelSame model, unkown friction and density
pp = −a1qbit + b1up
qbit = a2(pp − pc)− θ1|qbit |qbit + θ2v3
pbit = pc + Maqbit + (Mθ1 − Fd )q2bit + (ρd −
Mgθ2)hbit
a1 =βd
Vd, b1 = a1
a2 =1M, θ1 =
Fa + Fd
M
θ2 =(ρd − ρa)g
M, v3 = hbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 8/15

8
Observer Design - ModelSame model, unkown friction and density
pp = −a1qbit + b1up
qbit = a2(pp − pc)− θ1|qbit |qbit + θ2v3
pbit = pc + Maqbit + (Mθ1 − Fd )q2bit + (ρd −
Mgθ2)hbit
a1 =βd
Vd, b1 = a1
a2 =1M, θ1 =
Fa + Fd
M
θ2 =(ρd − ρa)g
M, v3 = hbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 8/15
8
Observer Design - ModelSame model, unkown friction and density
pp = −a1qbit + b1up
qbit = a2(pp − pc)− θ1|qbit |qbit + θ2v3
pbit = pc + Maqbit + (Mθ1 − Fd )q2bit + (ρd −
Mgθ2)hbit
a1 =βd
Vd, b1 = a1
a2 =1M, θ1 =
Fa + Fd
M
θ2 =(ρd − ρa)g
M, v3 = hbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 8/15

8
Observer Design - ModelSame model, unkown friction and density
pp = −a1qbit + b1up
qbit = a2(pp − pc)− θ1|qbit |qbit + θ2v3
pbit = pc + Maqbit + (Mθ1 − Fd )q2bit + (ρd −
Mgθ2)hbit
a1 =βd
Vd, b1 = a1
a2 =1M, θ1 =
Fa + Fd
M
θ2 =(ρd − ρa)g
M, v3 = hbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 8/15
9
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain.
Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15

9
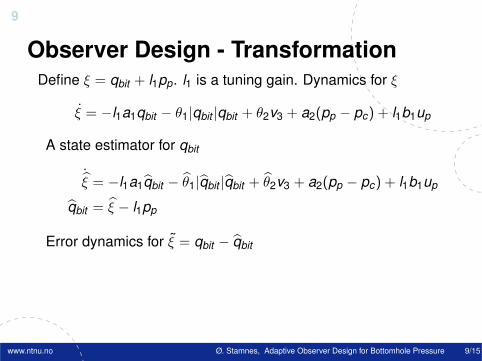
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain. Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15

9
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain. Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15
9
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain. Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15

9
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain. Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15

9
Observer Design - TransformationDefine ξ = qbit + l1pp. l1 is a tuning gain. Dynamics for ξ
ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
A state estimator for qbit
˙ξ = −l1a1qbit − θ1|qbit |qbit + θ2v3 + a2(pp − pc) + l1b1up
qbit = ξ − l1pp
Error dynamics for ξ = qbit − qbit
˙ξ = −l1a1ξ − θ1(|qbit |qbit − |qbit |qbit ) + θTφ(qbit , v3)
φ(qbit , v3) =[−|qbit |qbit , v3
]T
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 9/15
10
Observer Design - Lyapunov Analysis
Lyapunov type analysis
— V = 12 ξ
2 + 12 θ
T Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude
— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15
10
Observer Design - Lyapunov Analysis
Lyapunov type analysis— V = 1
2 ξ2 + 1
2 θT Γ−1θ
— V ≤ −l1a1ξ2
— for the choice ˙θ = −Γφξ
For which we can conclude— |V | ≤ V0 which gives |ξ| < c1 og |θ| < c2
— Using Barbalat’s lemma we get limt→∞ ξ = limt→∞ qbit = 0
— We also get limt→∞ θTφ = limt→∞
(−θ1qbit + θ2v3
)= 0
— qbit → 0 og θTφ→ 0 enables us to get an estimate pbit → pbit
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 10/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = Γφξ
Define: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15
11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15
11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

11
Observer Design - Adaptive lawProblem: ˙
θ = − ˙θ = ΓφξDefine: σ = θ + η(qbit , v3) and differentiate w.r.t. time
σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Let an estimate θ be:
θ = σ − η(qbit )
˙σ =∂η
∂qbit(
˙ξ1 − l1(−a1qbit + b1up)) +
∂η
∂v3v3
Observe that σ = θ og ˙θ = ˙σ = l1a1∂η∂qbit
qbit .
Solve pde: l1a1∂η∂qbit
= −Γφξ
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 11/15

12
Simulation - WeMod
0 10 20 30 40 50 60240
260
280
300
320
[bar
]
pbit
pbit
0 10 20 30 40 50 600
50
100
150
[min]
[bar
]
pc
pp
0 10 20 30 40 50 600
50010001500
qbit
qbit
0 10 20 30 40 50 60
246
x 104
Fa
Fa
0 10 20 30 40 50 600.01
0.015
[min]
ρa
ρa
Initial conditions:qbit (t0) = up(t0), ρa(t0) = 2ρa,Fa(t0) = 3Fa, t0 = 50s
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 12/15

13
Simulation - Data
0 0.5 1 1.5 2 2.550
100
150
200
250
barg
pbitpppbitf it
ppf it
0 0.5 1 1.5 2 2.50
10
20
30
hr
pc(barg)
up( liters )
0 0.5 1 1.5 2 2.5215
220
225
230
235
240
245
barg
pbit
pbit
0 0.5 1 1.5 2 2.50
0.005
0.01
hr
ρa
Fa
Initial conditions:qbit (t0) = up(t0), ρa(t0) = 1.2ρa,Fa(t0) = 1.5Fa
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 13/15

14
Conclusion
— A simple model for estimation has been presented
— An observer has been developed— Adapts to unknown friction and density— Low complexity— Good simulation results— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15
14
Conclusion
— A simple model for estimation has been presented— An observer has been developed
— Adapts to unknown friction and density— Low complexity— Good simulation results— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15

14
Conclusion
— A simple model for estimation has been presented— An observer has been developed— Adapts to unknown friction and density
— Low complexity— Good simulation results— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15

14
Conclusion
— A simple model for estimation has been presented— An observer has been developed— Adapts to unknown friction and density— Low complexity
— Good simulation results— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15

14
Conclusion
— A simple model for estimation has been presented— An observer has been developed— Adapts to unknown friction and density— Low complexity— Good simulation results
— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15

14
Conclusion
— A simple model for estimation has been presented— An observer has been developed— Adapts to unknown friction and density— Low complexity— Good simulation results— Tested on data from North Sea well
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 14/15

Thank you!
www.ntnu.no Ø. Stamnes, Adaptive Observer Design for Bottomhole Pressure 15/15
Related Documents











