1/36 Actuators and Power Electronics METE 3100 METE 3100 - C. Rossa 1 / 36 Lecture 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1/36
Actuators and Power Electronics
METE 3100
METE 3100 - C. Rossa 1 / 36 Lecture 1

2/36
Notice
This material is copyrighted and is for the sole use of students registered inMETE 3100.
This material shall not be distributed or disseminated to anyone other thanstudents registered in this course. Failure to abide by these conditions is abreach of copyright and may also constitute a breach of academic integrity asoutlined in the UOIT Academic Calendar.
Please do not share the contents posted on Blackboard on Course Hero or anyexternal website. All contents are copyright-protected. Any unauthorizedcopying, distribution, online posting, or use of these contents is subject to aninfringement of the Copyright Act of Canada.
METE 3100 - C. Rossa 2 / 36 Lecture 1

3/36
METE 3100 - Actuators and power electronics
Instructor• Dr. C. Rossa
Office hours
Tuesdays from 9:30 am to 11:30 pm
Any other time by appointment
Please avoid sending messages on Canvas. Contact me directly [email protected] for a fast reply.
METE 3100 - C. Rossa 3 / 36 Lecture 1

4/36
METE 3100 - Actuators and power electronics
Lab Instructor• Dr. Masoud Farzam
• Office hours: Fridays 2:30-3:30 pm
Teaching Assistant• Ben DeBoer
• Office hours: Wednesday 2-4 pm
METE 3100 - C. Rossa 4 / 36 Lecture 1
5/36
METE 3100 - Actuators and power electronics
Lectures• Tuesday, Thursday, 8:10 am to 9:30 am• Online, synchronous
Labs• Labs run biweekly - Friday from 15:30 to 17:30.• Synchronous, online• Labs will run remotely• More information will follow shortly
METE 3100 - C. Rossa 5 / 36 Lecture 1

6/36
METE 3100 - Actuators and power electronics
• Recommended textbook (not required)Principles of electric machines and power electronicsP. Sen (any edition)
• Course notes are available via Canvas- Please print and use them to make notes- Annotated pdfs will be posted after each class
• Please review the student conduct policies
METE 3100 - C. Rossa 6 / 36 Lecture 1

7/36
Course overview
The course comprises:21 Lectures5 Labs1 Midterm exam1 Final exam1 Lab exam1 Design project4 Assignments (not marked)
Grading policy:
In-class participation marks - up to 5% (bonus - not required)Attendance is mandatory for bonus marks
METE 3100 - C. Rossa 7 / 36 Lecture 1
Final examination 40 %Midterm examination 20 %Lab reports 20 %Design project report 15 %Design project presentation 5 %Assignments 0 %
100 %
8/36
Grading policy
Midterm (20%)
→ Monday, February 22, 2021
→ 8:15 to 10:45 am (online)
Final exam (40%) Comprehensive (all lectures)
→ Date and time TBD
→ Done during final exam
Design project (20%)
→ Report due March 31 by email
→ Presentation dates:• April 1, 8:10 - 9:30 am• April 6, 8:15 - 11:00 am• April 8, 8:10 - 9:30 am
METE 3100 - C. Rossa 8 / 36 Lecture 1

9/36
Missed exams
Missed midterm exams for legitimate reasons: Final final will be reweighedaccordingly provided that a formal request is accepted by FEAS
→ Late design projects will not be accepted.
→ Late lab reports will not be accepted.
METE 3100 - C. Rossa 9 / 36 Lecture 1
10/36
Design project
The design project includes:
→ Desing and analysis of an electromagnetic system
→ Modelling and simulation of power circuits
→ 3 or 4 students per group
Design projects will be handed in the form of a report (15%)
→ Overall technical rigour and accuracy: 5%
→ Electromechanicalical modelling: 2.5%
→ Electromechanical simulation: 2.5%
→ Language and clarity: 1.25%
→ Presentation and graphics: 1.25%
→ Project economics and feasibility: 2.5
→ Design report is due on March 31st
METE 3100 - C. Rossa 10 / 36 Lecture 1
11/36
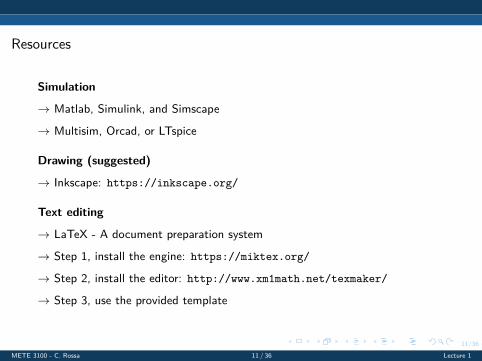
Resources
Simulation
→ Matlab, Simulink, and Simscape
→ Multisim, Orcad, or LTspice
Drawing (suggested)
→ Inkscape: https://inkscape.org/
Text editing
→ LaTeX - A document preparation system
→ Step 1, install the engine: https://miktex.org/
→ Step 2, install the editor: http://www.xm1math.net/texmaker/
→ Step 3, use the provided template
METE 3100 - C. Rossa 11 / 36 Lecture 1

12/36
Design project presentation
Design project presentation (5%)
→ Thursday April 1st, 8:10-9:30 am
→ Tuesday April 6th, 8:10-11:00 am
→ Thursday April 8th, 8:10-9:30 am
→ 10 to 15 min per group depending on the number of groups
Grading:
→ Technical rigour and accuracy: 2%
→ Clarity: 1%
→ Graphics: 1%
→ Questions and answers: 1%
METE 3100 - C. Rossa 12 / 36 Lecture 1

13/36
Course overview
• Notes will be available on the class website ahead of time
• Please download the notes and use them in class
• Some information may be missing; the missing information will be shownin class
• Annotated slides will be posted after each class
• You are strongly encourage to attend all lectures
• Lecture notes are not self-contained
METE 3100 - C. Rossa 13 / 36 Lecture 1

14/36
Topics
• Magnetic circuits
• Power electronics
• Electromagnetic energy conversion
• Electric machines
• Electric motors
• Modelling electric machines
• Speed and torque control of electric motors
METE 3100 - C. Rossa 14 / 36 Lecture 1
15/36
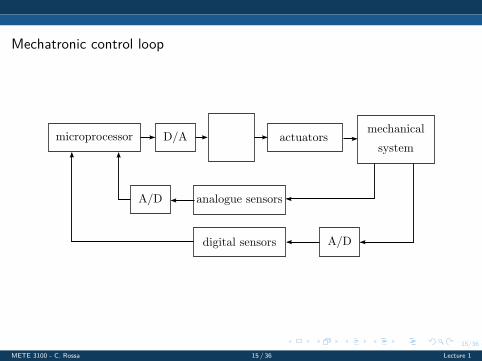
Mechatronic control loop
METE 3100 - C. Rossa 15 / 36 Lecture 1

16/36
Mechatronic control loop
→ Operational amplifiers
→ Transformers (?)
→ AC/DC converters
→ DC/DC converters
→ DC/AC converters
→ Pulse width modulation
METE 3100 - C. Rossa 16 / 36 Lecture 1

17/36
Example of a power unit
METE 3100 - C. Rossa 17 / 36 Lecture 1

18/36
Electric cars
METE 3100 - C. Rossa 18 / 36 Lecture 1

19/36
Electromechanical actuators
Lorentz actuator: A nearly perfect current to force converter
→ How does the current relate to the magnetic field?
→ How does magnetic field relate to the force?
→ What is the influence of the material?
→ How can we model, power, and control the actuator?
METE 3100 - C. Rossa 19 / 36 Lecture 1
20/36
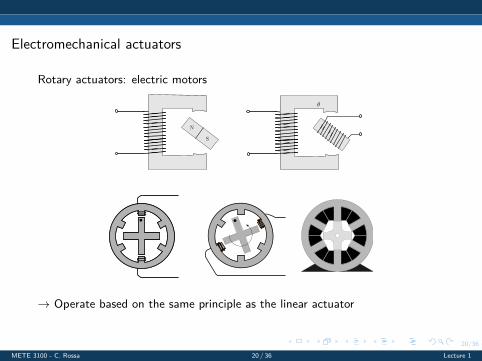
Electromechanical actuators
Rotary actuators: electric motors
→ Operate based on the same principle as the linear actuator
METE 3100 - C. Rossa 20 / 36 Lecture 1

21/36
Electric motors
METE 3100 - C. Rossa 21 / 36 Lecture 1

22/36
Closed-loop controlForce control
Velocity control
METE 3100 - C. Rossa 22 / 36 Lecture 1

23/36
Example of design projects
P1 - Transducer for kinetic energy harvesting using full-wave rectification
P2 - Actuation system with analogue PID grasping force controller of a handprosthetics
P3 - Linear induction motor for electromagnetic levitation and propulsion of atrain
P4 - Sine pulse width modulation for a 3-phase alternating current motor
P5 - Design and control of a linear solenoid for high-precision positioning of acable-driven laparoscopic endoscope
P6 - A bidirectional DC-DC converter fed DC motor for an electric vehicle
METE 3100 - C. Rossa 23 / 36 Lecture 1

24/36
Example of design projects
P7 - Design and control of a 3D printed stepper motor
P8 - Speed control of brushless DC electric motor using a multilevel inverterfor drones
P9 - Field-oriented control of a 3-phase permanent magnet motor
P10 - Electromechanical transducer for harvesting the energy from oceanwaves using DC/DC converters
P11 - 3D printed axial brushless motor with a discrete autotransformer
P12 - Propose your own project
You are strongly encourage to meet with the course instructor and TA ona regular basis to get continuous feedback on your design project
METE 3100 - C. Rossa 24 / 36 Lecture 1
25/36
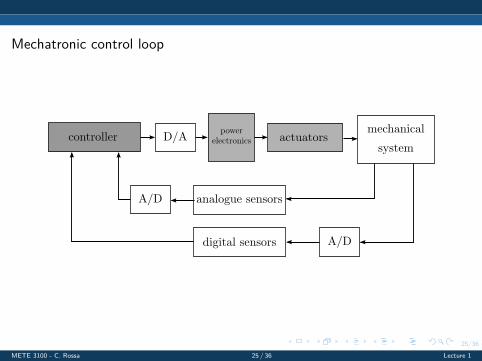
Mechatronic control loop
METE 3100 - C. Rossa 25 / 36 Lecture 1

26/36
Suggested review topics
→ Fundamentals of electric circuit
→ Effective power, rms voltage, peak voltage, etc
→ Electromagnetism
→ Feedback control
→ Electromechanics
→ Arduino, C/C++
→ Solid state electronics
→ Transistors, diodes, operational amplifiers
METE 3100 - C. Rossa 26 / 36 Lecture 1

27/36
Applications
What current must be applied to each of the robot joints so that end-effectorapplies an specific force to an object?
What voltage must be applied to each of the robot joints so that end-effectormoves in a given direction with a constant speed?
METE 3100 - C. Rossa 27 / 36 Lecture 1
28/36
Applications
The levitation control system of the train must ensure that the train does nottouches the guide. How can we design and control the levitation system?
METE 3100 - C. Rossa 28 / 36 Lecture 1

29/36
Applications
The pointing control system of a space telescope is desired to achieve anaccuracy of 0.01 minute of arc. How can it be controlled?
METE 3100 - C. Rossa 29 / 36 Lecture 1

30/36
Applications
The rotational velocity of of the satellite is adjusted by changing the length ofthe beam. How can we control the position of the beam if it is actuated by aDC motor? Could a stepper motor be used instead?
METE 3100 - C. Rossa 30 / 36 Lecture 1

31/36
Applications
A robot gripper is to be controlled by a DC motor. How can we apply acontrolled grasping force?
METE 3100 - C. Rossa 31 / 36 Lecture 1

32/36
Applications
Automated control of the laser position during eye surgery enables theophthalmologist to indicate to the controller where lesions should be inserted.
How can we design a controller that ensures accurate positioning? How do themotor characteristics influence performance?
METE 3100 - C. Rossa 32 / 36 Lecture 1

33/36
Applications
A ventricular assist device is a mechanical pump used to support heart functionand blood flow in people with weak or failing hearts.
The pump valve is controlled by a solenoid actuator. How can we relate theapplied voltage to the mechanical displacement of the actuator?
METE 3100 - C. Rossa 33 / 36 Lecture 1

34/36
Applications
Altitude control of the Osprey Tiltrotor requires precise velocity control of theelectric motors. How do the motor characteristics influence the a PID gains?
How can DC power stored in a battery be converted in AC power?
METE 3100 - C. Rossa 34 / 36 Lecture 1

35/36
Applications
A wind generator produces AC current. How can the power be injected to anexisting AC grid?
→ The AC current is first converted to DC, then back to AC. Why?
METE 3100 - C. Rossa 35 / 36 Lecture 1

36/36
Next episode...
• Magnetic circuits
METE 3100 - C. Rossa 36 / 36 Lecture 1
Related Documents