Open Systems & Information Dynamics Vol. 15, No. 1 (2008) 1–12 c World Scientific Publishing Company Active Anti-Synchronization between Two Novel Identical as well as Distinctive Hyperchaotic Systems M. M. Al-sawalha, M. S. M. Noorani Center for Modelling & Data Analysis, School of Mathematical Sciences Faculty of Science and Technology, Universiti Kebangsaan Malaysia Bangi, 43600 Selangor Malaysia e-mail: sawalha [email protected] (Received: May 5, 2008) Abstract. This paper brings attention to hyperchaos anti-synchronization between two identical and distinctive hyperchaotic systems using active control theory. The sufficient conditions for achieving anti-synchronization of two high dimensional hyperchaotic systems is derived based on Lyapunov stability theory, where the controllers are designed by using the sum of relevant variables in hyperchaotic systems. Numerical results are presented to justify the theoretical analysis strategy. 1. Introduction Since Pecora and Carroll [1] introduced a method to synchronize two iden- tical chaotic systems with different initial conditions, chaos synchronization has attracted a great deal of attention in various fields. It has been in- tensively studied in the last few years and it has been widely explored in a variety of fields including physical, chemical and ecological systems [2]. Hence various synchronization schemes, such as adaptive control [3, 4, 5], lin- ear and nonlinear feedback synchronization methods [6], active control [7], and backstepping design technique [8] have been successfully applied to chaos synchronization. The concept of synchronization has been extended to gener- alized synchronization [9, 10], phase synchronization [9], lag synchronization [11], and even anti-phase synchronization (APS) [12, 13]. APS can also be in- terpreted as anti-synchronization (AS), which is a phenomenon that the state vectors of the synchronized systems have the same amplitude but opposite signs as those of the driving system. Therefore, the sum of two signals are ex- pected to converge to zero when either AS or APS appears. Recently, active control has been applied to anti-synchronize two identical chaotic systems [14, 15, 16]. Moreover, it is examined in different types of chaotic systems [17]. In fact, in engineering, it is hardly the case that every component can

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Open Systems & Information DynamicsVol. 15, No. 1 (2008) 1–12c© World Scientific Publishing Company
Active Anti-Synchronization
between Two Novel Identical as well as Distinctive
Hyperchaotic Systems
M. M. Al-sawalha, M. S.M. Noorani
Center for Modelling & Data Analysis, School of Mathematical SciencesFaculty of Science and Technology, Universiti Kebangsaan MalaysiaBangi, 43600 Selangor Malaysiae-mail: sawalha [email protected]
(Received: May 5, 2008)
Abstract. This paper brings attention to hyperchaos anti-synchronization between twoidentical and distinctive hyperchaotic systems using active control theory. The sufficientconditions for achieving anti-synchronization of two high dimensional hyperchaotic systemsis derived based on Lyapunov stability theory, where the controllers are designed by usingthe sum of relevant variables in hyperchaotic systems. Numerical results are presented tojustify the theoretical analysis strategy.
1. Introduction
Since Pecora and Carroll [1] introduced a method to synchronize two iden-tical chaotic systems with different initial conditions, chaos synchronizationhas attracted a great deal of attention in various fields. It has been in-tensively studied in the last few years and it has been widely explored ina variety of fields including physical, chemical and ecological systems [2].Hence various synchronization schemes, such as adaptive control [3, 4, 5], lin-ear and nonlinear feedback synchronization methods [6], active control [7],and backstepping design technique [8] have been successfully applied to chaossynchronization. The concept of synchronization has been extended to gener-alized synchronization [9, 10], phase synchronization [9], lag synchronization[11], and even anti-phase synchronization (APS) [12, 13]. APS can also be in-terpreted as anti-synchronization (AS), which is a phenomenon that the statevectors of the synchronized systems have the same amplitude but oppositesigns as those of the driving system. Therefore, the sum of two signals are ex-pected to converge to zero when either AS or APS appears. Recently, activecontrol has been applied to anti-synchronize two identical chaotic systems[14, 15, 16]. Moreover, it is examined in different types of chaotic systems[17]. In fact, in engineering, it is hardly the case that every component can

2 M. M. Al-sawalha, M. S.M. Noorani
be assumed to be identical. Thus, it is much more attractive and challenge-able to realize anti-synchronization of two different chaotic systems. Theaim of this work is to further develop the state observer method for con-structing anti-synchronization of a high-dimensional system, since the afore-mentioned method is mainly concerned with the synchronization of chaoticsystems with a low-dimensional attractor, characterized by one positive Lya-punov exponent. This feature limits the complexity of the chaotic dynamics.It is believed that chaotic systems with higher dimensional attractors havemuch wider application. In fact, the adoption of higher dimensional chaoticsystems has been proposed for secure communication and the presence ofmore than one positive Lyapunov exponent clearly improves security of thecommunication scheme by generating more complex dynamics. Recently,hyperchaotic systems were also considered with quickly increasing interest.Hyperchaotic system is usually classified as a chaotic system with more thanone positive Lyapunov exponent.
The object of this work is to study hyperchaos anti-synchronization of twoidentical hyperchaotic systems. We also apply also we apply active controltheory to achieve anti-synchronization between two different hyperchaoticsystems.
2. Anti-Synchronization
Consider a chaotic continuous system described by
x = f(x(t), t) , (1)
where x ∈ Rn is a n-dimensional state vector of the system, and f : R
n → Rn
defines a vector field in n-dimensional space. We decompose the functionf(x(t), t) as
f(x(t), t) = g(x(t), t) + h(x(t), t) , (2)
where g(x(t)) is the linear part of f(x(t), t) described byPlease correct
g(x(t)) = Ax(t) , (3)
where A is a full rank constant matrix and all eigenvalues of A have negativereal parts, h(x(t), t) = f(x(t), t)−g(x(t), t) is the nonlinear part of f(x(t), t).Then the system (1) can be written as
x = g(x(t), t) + h(x(t), t) . (4)
The hyperchaotic anti-synchronization discussed in this paper is definedas the complete anti-synchronization, which means that the state vectors ofsynchronized systems have the same absolute values but opposite signs. We

Active Anti-Synchronization between Two Hyperchaotic Systems 3
say that anti-synchronization of two systems M1 and M2 is achieved if thefollowing equation holds:
limt→∞
‖x1(t) + x2(t)‖ = 0 , (5)
where xi(t), i = 1, 2 is the state vector of the system Mi(t), i = 1, 2. Weconstruct a new system described by
w(t) = g(w(t), t) − h(x(t), t) . (6)
The anti-synchronization error between system (1) and system (6) is definedas e(t) = x(t) + w(t), the evolution of which is determined by the followingequation:
e(t) = x(t) + w(t) = A(x(t) + w(t)) = Ae(t) . (7)
Since all eigenvalues of the matrix A have negative real parts, the zero pointof synchronization error is asymptotically stable and e(t) tends to zero whent → ∞. Then the state vectors x(t) and w(t) of different systems can be anti-synchronized. The simplest configuration of matrix A=diag(λ1, λ2, . . . , λn)through separation of systems can be used for the adjustment of parametersto satisfy the stability criterion of a linear system requiring that all eigenval-ues have negative real.
3. Systems Description
The new hyperchaotic Chen system [18] is given by
x = a(y − x) ,y = (c − a)x − xz + cy ,z = −bz + xy − yz + xz − w ,w = −dw + yz − xz ,
(8)
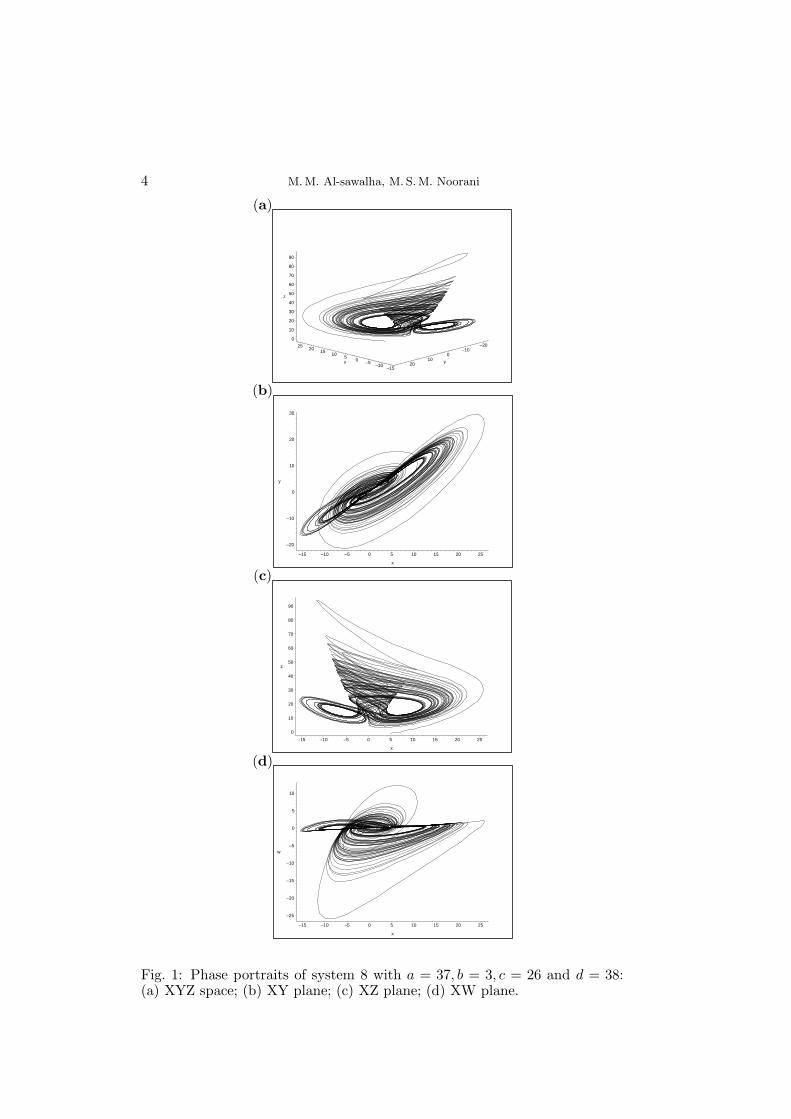
where x, y, z, and w are state variables, and a, b, c, and d are real constants.When a = 37, b = 3, d = 38, c = 33.6, system (8) exhibit a single limit cycle,also when c is reduced to c = 32.6, a double limit cycle is found. System (8)is hyperchaotic when a = 37, b = 3, d = 38, c = 26, the projections of thehyperchaotic attractor are shown in Fig. 1(a)–(d).
Recently, Wang et al. [19] constructed a new hyperchaotic system basedon a modified Lu system by introducing a nonlinear state feedback controller.The new modified hyperchaotic Lu system is given by
x = a(y − x + yz) ,y = −xz + by + w ,z = xy − cz ,w = −kx ,
(9)
4 M. M. Al-sawalha, M. S.M. Noorani
(a)
–15–10
–50
510
1520
25
x
–20–10
010
20 y
0
10
20
30
40
50
60
70
80
90
z
(b)
–20
–10
0
10
20
30
y
–15 –10 –5 0 5 10 15 20 25
x
(c)
0
10
20
30
40
50
60
70
80
90
z
–15 –10 –5 0 5 10 15 20 25
x
(d)
–25
–20
–15
–10
–5
0
5
10
w
–15 –10 –5 0 5 10 15 20 25
x
Fig. 1: Phase portraits of system 8 with a = 37, b = 3, c = 26 and d = 38:(a) XYZ space; (b) XY plane; (c) XZ plane; (d) XW plane.

Active Anti-Synchronization between Two Hyperchaotic Systems 5
where x, y, z, and w are state variables and a, b, c, and d, are constant pa-rameters. When parameters a = 35, b = 14, c = 3 and k = 5, system (9)is hyperchaotic, the projections of the hyperchaotic attractor are shown inFig. 2(a)–(d).
4. Anti-Synchronization of Two Identical Hyperchaotic Systems
In order to observe the anti-synchronization behaviour between two identicalhyperchaotic system, assume that we have two identical modified hyperchoticLu systems where the driving system with four state variables, denoted by thesubscript 1, drives the response system having identical equations denotedby the subscript 2. However, the initial condition on the driving system isdifferent from that of the response system. The two modified hyperchotic Lusystems are described, respectively, by the following equations:
x1 = a(y1 − x1 + y1z1) ,y1 = −x1z1 + by1 + w1 ,z1 = x1y1 − cz1 ,w1 = −kx1
(10)
and
x2 = a(y2 − x2 + y2z2) + β1(t) ,y2 = −x2z2 + by2 + w2 + β2(t) ,z2 = x2y2 − cz2 + β3(t) ,w2 = −kx2 + β4(t) .
(11)
We have introduced four control functions β1(t), β2(t), β3(t) and β4(t) in (11).These functions are to be determined. Let us define the error states betweenthe response system (11) that is to be controlled and the controlling drivesystem (10) as
e1 = x2 + x1 , e2 = y2 + y1 , e3 = z2 + z1 , e4 = w2 + w1 . (12)
By adding (10) to (11) yields the error dynamical system between (10) and(11)
e1 = a(e2 − e1) + ay1z1 + ay2z2 + β1(t) ,e2 = be2 + e4 − x1z1 − x2z2 + β2(t) ,e3 = −ce3 + x1y1 + x2y2 + β3(t) ,e4 = −ke1 + β4(t) .
(13)
We define the active control functions β1(t), β2(t), β3(t) and β4(t) as follows:
β1(t) = V1(t) − ay1z1 − ay2z2 ,β2(t) = V2(t) + x1z1 + x2z2 ,β3(t) = V3(t) − x1y1 − x2y2 ,β4(t) = V4(t) .
(14)

6 M. M. Al-sawalha, M. S.M. Noorani
(a)
–30–20
–100
1020
x
–6–4
–20
24
y
1
2
3
4
5
6
7
8
9
z
(b)
–6
–4
–2
0
2
4
y
–30 –20 –10 0 10 20
x
(c)
1
2
3
4
5
6
7
8
9
z
–30 –20 –10 0 10 20
x
(d)
–15
–10
–5
0
5
10
w
–30 –20 –10 0 10 20
x
Fig. 2: Phase portraits of system 9 with a = 35, b = 14, c = 3 and k = 5: (a)XYZ space; (b) XY plane; (c) XZ plane; (d) XW plane.

Active Anti-Synchronization between Two Hyperchaotic Systems 7
Hence the error system (13) becomes
e1 = a(e2 − e1) + V1 ,e2 = be2 + e4 + V2 ,e3 = −ce3 + V3 ,e4 = −ke1 + V4 .
(15)
Eq. (15) describes the error dynamics and can be considered in terms of acontrol problem where the system to be controlled is linear with control inputV1(t), V2(t), V3(t) and V4(t) as a function of e1, e2, e3 and e4. As long as thesefeedbacks stabilize the system, e1, e2, e3 and e4 converge to zero as time t
goes to infinity. This implies that two modified Lu hyperchaotic systems areanti-synchronized with feedback control. There are many possible choices forthe control V1(t), V2(t), V3(t) and V4(t). We choose
V1(t) = −ae2 ,V2(t) = −(1 + b)e2 ,V3(t) = 0 ,V4(t) = ke1 − e4 ,
(16)
then the error dynamical system is
e1 = −ae1 ,e2 = −e2 ,e3 = −ce3 ,e4 = −e4 .
(17)
Eq. (17) describes the error dynamics. Now we define the Laypunov functionfor the system (17) as follows:
V (e1, e2, e3, e4) =1
2e2
1 +1
2e2
2 +1
2e2
3 +1
2e2
4 . (18)
This function is positive definite and equals zero at the equilibrium of thesystem (17). Moreover, the derivative of the Laypunov function (18) has theform
V = −[
ae2
1 + e2
2 + ce2
3 + e2
4
]
, (19)
which is negative definite. From Lyapunov direct method, we have that thezero solution of the system (17) is asymptotically stable. This implies thatthe two modified Lu hyperchaotic systems are anti-synchronized.
4.1. Numerical Results
Fourth order Runge-Kutta integration method has been used to solve thesystems of differential equations (10) and (11). In addition, time step size
8 M. M. Al-sawalha, M. S.M. Noorani
(a)
x2
x1
t
x1,x
2
876543210
25
15
5
-5
-15
-25
(b)
y2
y1
t
y1,y
2
876543210
5
4
3
2
1
0
-1
-2
-3
-4
-5
(c)
z2
z1
t
z 1,z
2
876543210
8
6
4
2
0
-2
-4
-6
-8
(d)
w2
w1
t
w1,w
2
876543210
20
15
10
5
0
-5
-10
-15
-20
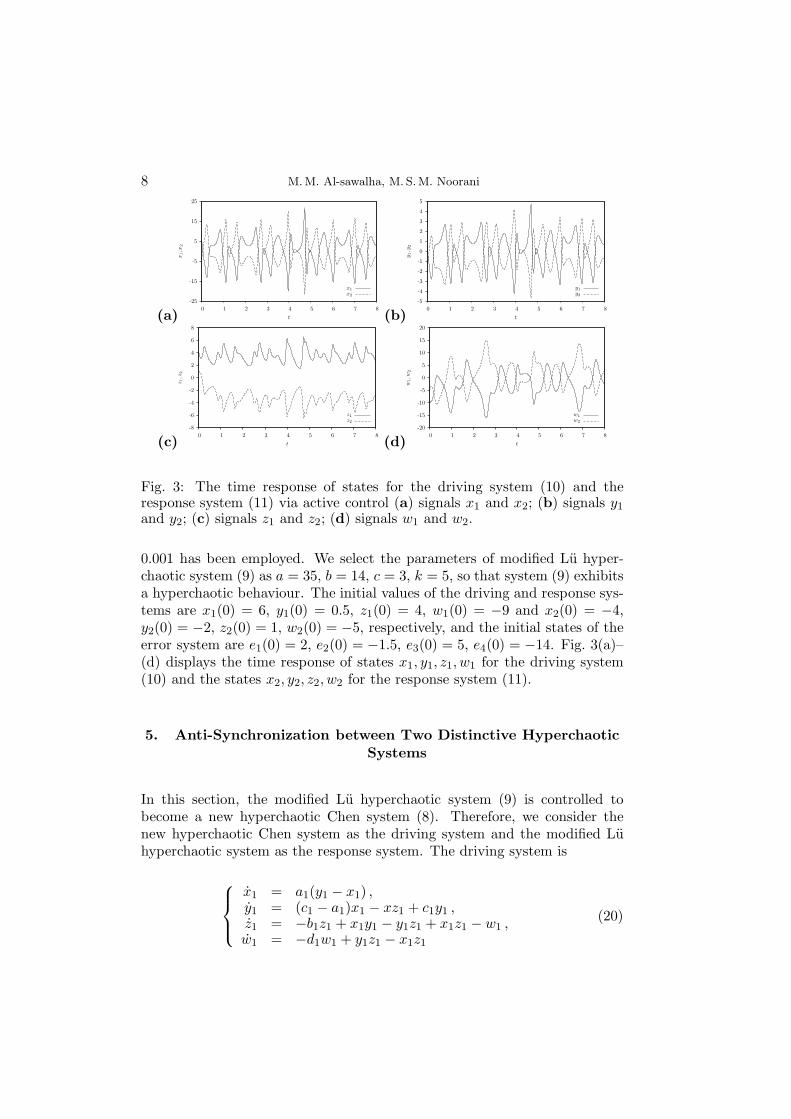
Fig. 3: The time response of states for the driving system (10) and theresponse system (11) via active control (a) signals x1 and x2; (b) signals y1
and y2; (c) signals z1 and z2; (d) signals w1 and w2.
0.001 has been employed. We select the parameters of modified Lu hyper-chaotic system (9) as a = 35, b = 14, c = 3, k = 5, so that system (9) exhibitsa hyperchaotic behaviour. The initial values of the driving and response sys-tems are x1(0) = 6, y1(0) = 0.5, z1(0) = 4, w1(0) = −9 and x2(0) = −4,y2(0) = −2, z2(0) = 1, w2(0) = −5, respectively, and the initial states of theerror system are e1(0) = 2, e2(0) = −1.5, e3(0) = 5, e4(0) = −14. Fig. 3(a)–(d) displays the time response of states x1, y1, z1, w1 for the driving system(10) and the states x2, y2, z2, w2 for the response system (11).
5. Anti-Synchronization between Two Distinctive HyperchaoticSystems
In this section, the modified Lu hyperchaotic system (9) is controlled tobecome a new hyperchaotic Chen system (8). Therefore, we consider thenew hyperchaotic Chen system as the driving system and the modified Luhyperchaotic system as the response system. The driving system is
x1 = a1(y1 − x1) ,y1 = (c1 − a1)x1 − xz1 + c1y1 ,z1 = −b1z1 + x1y1 − y1z1 + x1z1 − w1 ,w1 = −d1w1 + y1z1 − x1z1
(20)

Active Anti-Synchronization between Two Hyperchaotic Systems 9
and the response system is
x2 = a2(y2 − x2 + y2z2) + η1(t) ,y2 = −x2z2 + b2y2 + w2 + η2(t) ,z2 = x2y2 − c2z2 + η3(t) ,w2 = −k2x2 + η4(t) ,
(21)
where η1(t), η2(t), η3(t) and η4(t) are the active control functions introducedin system (21). These functions are to be determined. Let the error statesbetween the response system (20) and the drive system (21) are defined by
e1 = x2 + x1 , e2 = y2 + y1 , e3 = z2 + z1 , e4 = w2 + w1 . (22)
By adding (20) to (21) yields the error dynamical system between (20) and(21)
e1 = a2(e2 − e1) + (a1 − a2)(y1 − x1) + a2y2z2 + η1(t) ,e2 = be2 + (c1 − b2)y1 − x2z2 − x1z1 + w2 + (c1 − a1)x1 + η2(t) ,e3 = −c2e3 + (c2 − b1)z1 + x2y2 + x1y1 − y1z1 + x1z1 + w1 + η2(t) ,e4 = −k2x2 − d1w1 + y1z1 − x1z1 + η4(t) .
(23)
We define the active control functions η1(t), η2(t), η3(t) and η4(t) as follows:
η1(t) = V1(t) − (a1 − a2)(y1 − x1) − a2y2z2 ,η2(t) = V2(t) − (c1 − b2)y1 + x2z2 + x1z1 − w2 − (c1 − a1)x1 ,η3(t) = V3(t) − (c2 − b1)z1 − x2y2 − x1y1 + y1z1 − x1z1 − w1 ,η4(t) = V4(t) + k2x2 + d1w1 − y1z1 + x1z1 .
(24)
Hence the error system (23) becomes
e1 = a2(e2 − e1) + V1 ,e2 = b2e2 + V2 ,e3 = −c2e3 + V3 ,e4 = V4 .
(25)
Eq. (25) describes the error dynamics and can be considered in terms of acontrol problem where the system to be controlled is linear with control in-put V1(t), V2(t), V3(t) and V4(t) as a function of e1, e2, e3 and e4. As longas these feedbacks stabilize the system, e1, e2, e3 and e4 converge to zeroas time t goes to infinity. This implies that the anti-synchronization be-tween new Chen hyperchaotic system and modified Lu hyperchaotic systemis achieved with feedback control. There are many possible choices for thecontrol V1(t), V2(t), V3(t) and V4(t). We choose
V1(t) = −a2e2 ,V2(t) = −(1 + b)e2 ,V3(t) = 0 ,V4(t) = −e4 ,
(26)

10 M. M. Al-sawalha, M. S.M. Noorani
then the error dynamical system is
e1 = −a2e1 ,e2 = −e2 ,e3 = −c2e3 ,e4 = −e4 .
(27)
Eq. (27) describes the error dynamics. Now we define the Laypunov functionfor the system (27) as follows:
V (e1, e2, e3, e4) =1
2e2
1 +1
2e2
2 +1
2e2
3 +1
2e2
4 . (28)
This function is positive definite and equals zero at the equilibrium of thesystem (27). Moreover, the derivative of the Laypunov function (28) has theform
V = l −[
a2e2
1 + e2
2 + c2e2
3 + e2
4
]
, (29)
which is negative definite. From Lyapunov direct method, we have that thezero solution of the system (27) is asymptotically stable. This implies thatthe new Chen hyperchaotic system and modified Lu hyperchaotic system areanti-synchronized.
5.1. Numerical Results
Fourth order Runge-Kutta integration method has been used to solve thesystems of differential equations (20) and (21). In addition, time step size0.001 has been employed. We select the parameters of new Chen hyperchaoticsystem (8) as a = 37, b = 3, c = 26, d = 38, and the parameters of modifiedLu hyperchaotic system (9) a = 35, b = 14, c = 3 and k = 5, so that eachof them exhibits a hyperchaotic behaviour. The initial values of the drivingand the response systems are x1(0) = 5, y1(0) = 8, z1(0) = −1, w1(0) = −3and x2(0) = 3, y2(0) = 4, z2(0) = 5, w2(0) = 5, respectively, and the initialstates of the error system are e1(0) = 8, e2(0) = 12, e3(0) = 4, e4(0) = 2.The diagram of the modified hyperchaotic Lu system controlled to becomehyperchaotic new Chen one is shown in Fig. 4(a)–(d).
6. Conclusion
This study demonstrates that anti-synchronization can be established by ac-tive control method in two identical as well as distinctive hyperchaotic sys-tems moving in different asymmetric potentials Several numerical simulationsare provided to illustrate the anti-synchronization approach.

Active Anti-Synchronization between Two Hyperchaotic Systems 11
(a)
x2
x1
t
x1,x
2
876543210
30
20
10
0
-10
-20
-30
(b)
y2
y1
t
y1,y
2
876543210
40
30
20
10
0
-10
-20
-30
(c)
z2
z1
t
z 1,z
2
876543210
100
80
60
40
20
0
-20
-40
-60
-80
-100
(d)
w2
w1
t
w1,w
2
876543210
30
20
10
0
-10
-20
-30
Fig. 4: The time response of states for drive system (20) and the responsesystem (21) via active control (a) signals x1 and x2; (b) signals y1 and y2;(c) signals z1 and z2; (d) signals w1 and w2.
Acknowledgement
This work is financially supported by the Malaysian Ministry of Science,Technology and Environment Sciencefund grant: 06-01-02-SF0177.
Bibliography
[1] L. M. Pecora, T. L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett. 64,821 (1990).
[2] G. Chen, X. Dong, From chaos to order, Singapore, World Scientific, 1998.
[3] M. T. Yassen, Adaptive control and synchronization of a modified Chua’s circuit sys-tem, Appl. Math. Comput. 135, 113 (2003).
[4] J. H. Park, Adaptive synchronization of hyperchaotic Chen system with uncertain pa-rameters, Chaos, Solitons & Fractals 26, 959 (2005).
[5] W.Y. Xian, Z. Hongmin, Synchronization of two hyperchaotic systems via adaptivecontrol, doi:10.1016/j.chaos.2007.06.100.
[6] M. T. Yassen, Controlling chaos and synchronization for new chaotic system usinglinear feedback control, Chaos, Solitons & Fractals 26, 913 (2005).
[7] E. W. Bai, K. E. Lonngen, Synchronization of two Lorenz systems using active control,Chaos, Solitons & Fractals 8, 51 (1997).
[8] X. Wu, J. Lu, Parameter identification and backstepping control of uncertain Lu sys-tem, Chaos, Solitons & Fractals 18, 721 (2003).
[9] S. S. Yang, K. Duan, Generalized synchronization in chaotic systems, Chaos, Solitons& Fractals 10, 1703 (1998).

12 M. M. Al-sawalha, M. S.M. Noorani
[10] G. M. Rosenblum , S.A. Pikovsky, J. Kurths, Phase synchronization of chaotic oscil-lators, Phys. Rev. Lett. 76, 1804 (1996).
[11] S. Taherion, Y.C. Lai, Observability of lag synchronization of coupled chaotic oscilla-tors, Phys. Rev. E 59, 6247 (1999).
[12] Y. Zhang, J. Sun, Chaotic synchronization and anti-synchronization based on suitableseparation, Phys. Lett. A 330, 442 (2004).
[13] J. B. Liu, C. F.Ye, S. J.Zhang, W.T. Song, Anti-phase synchronization in coupled maplattices, Phys Lett A 274, 27 (2000).
[14] E. W. Bai, K. E. Lonngsen, Synchronization of two Lorenz systems using active control,Chaos, Solitons & Fractals 8, 51 (1997).
[15] H. Zhang, X.K. Ma, Synchronization of uncertain chaotic systems with parametersperturbation via active control, Chaos, Solitons & Fractals 21, 39 (2004).
[16] S. Codreanu, Synchronization of spatiotemporal nonlinear dynamical systems by anactive control, Chaos, Solitons & Fractals 15, 507 (2003).
[17] M. C. Ho, Y.C. Hung, C.H. Chou, Phase and anti-phase synchronization of twochaotic systems by using active control, Phys. Lett. A 296, 43 (2002).
[18] Yan. Zhenya, Yu. Pei, Hyperchaos synchronization and control on a new hyperchaoticattractor, Chaos Solitons & Fractals 35, 333 (2008).
[19] G. Wang, X. Zhang, Y. Zheng, Y. Li, A new modified hyperchaotic Lu system, PhysicaA 371, 260 (2006).
Related Documents











