Similarity-Based Prediction of Travel Times for Vehicles Traveling on Known Routes Christian S. Jensen and Dalia Tiesyte Aalborg University, Denmark ACMGIS, November 6-8, 2008

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Similarity-Based Prediction of Travel Times for Vehicles
Traveling on Known Routes
Christian S. Jensen and Dalia Tiesyte
Aalborg University, Denmark
ACMGIS, November 6-8, 2008
Bus Arrival Time Prediction• Modern collective transport infrastructures
encompass online, geo-positioned buses, a central server, and online variable displays
inform the users of the anticipated arrival times of buses
reward/penalize bus companies based on their compliance with service agreements
• Accurate arrival time prediction is of essence important for the companies that deliver the software to the bus
companies currently deployed techniques are typically do not offer the desired
accuracy motivated by the availability of large collections of historical data,
we propose a data-driven approach to arrival time prediction
3
Prediction of Travel Times
• Provide users with more accurate real-time information• Improve individual journey planning and reduce waiting
times• Assist in the planning of routes and schedules• Enable carriers to provide the expected service (on-time
arrivals, predictable delays)• This contributes to making collective transport more
attractive.
Goal: To predict the near-future arrival times at timing points of vehicles traveling along on known
routes.
Proposed Approach
IWCTS, Dublin, 21 April 2008Summer School, Agder, July 1, 2008 4
Find the historical trajectory most similar to the partial real-time trajectory of the vehicle
Use the “future” of the historical trajectory to predict the vehicle’s future movement.
5
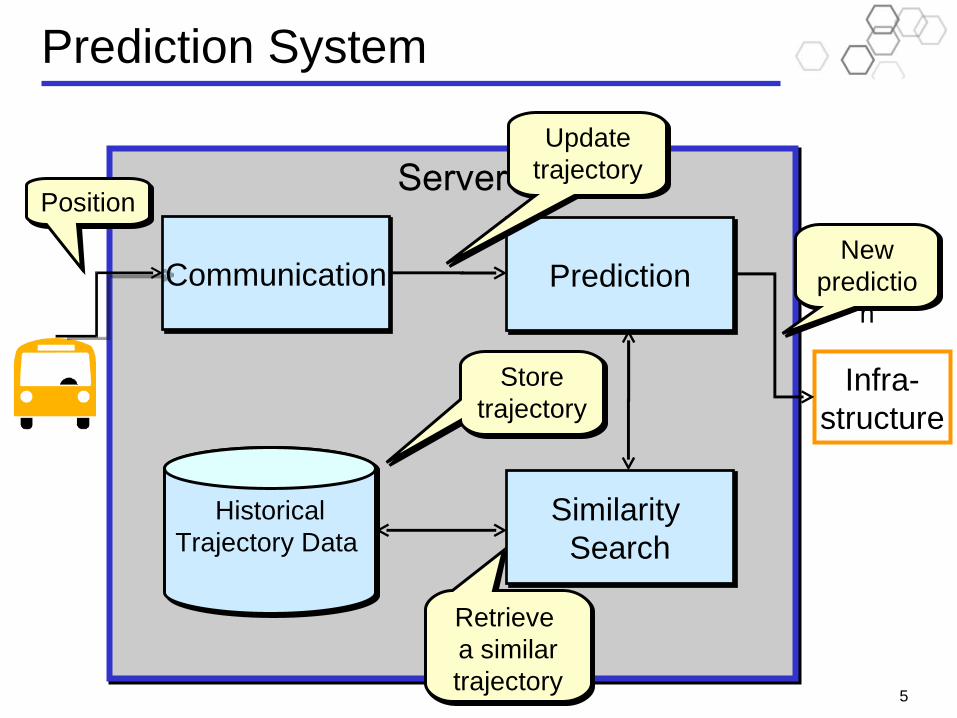
Prediction System
Server
Communication
Infra-structure
HistoricalTrajectory Data
Storetrajectory
Retrieve a similartrajectory
New predictio
n
Position
Prediction
Similarity Search
Update trajectory
6
Outline• Problem statement
Data representation Nearest neighbor trajectories
• Similarity measures for trajectories of vehicles• Similarity search• Results• Conclusion
7
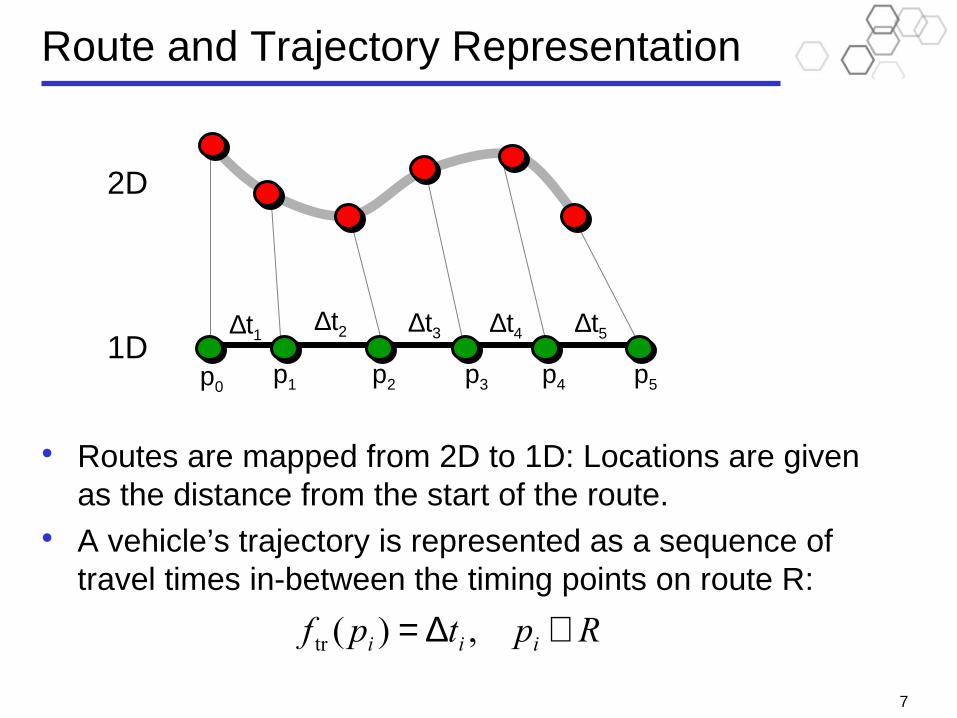
Route and Trajectory Representation
• Routes are mapped from 2D to 1D: Locations are given as the distance from the start of the route.
• A vehicle’s trajectory is represented as a sequence of travel times in-between the timing points on route R:
Rptpf iii ∈∆= ,)(tr
2D
1D ∆t1
∆t2 ∆t3 ∆t4 ∆t5
p0 p1 p2 p3 p4 p5
FuturePast
8
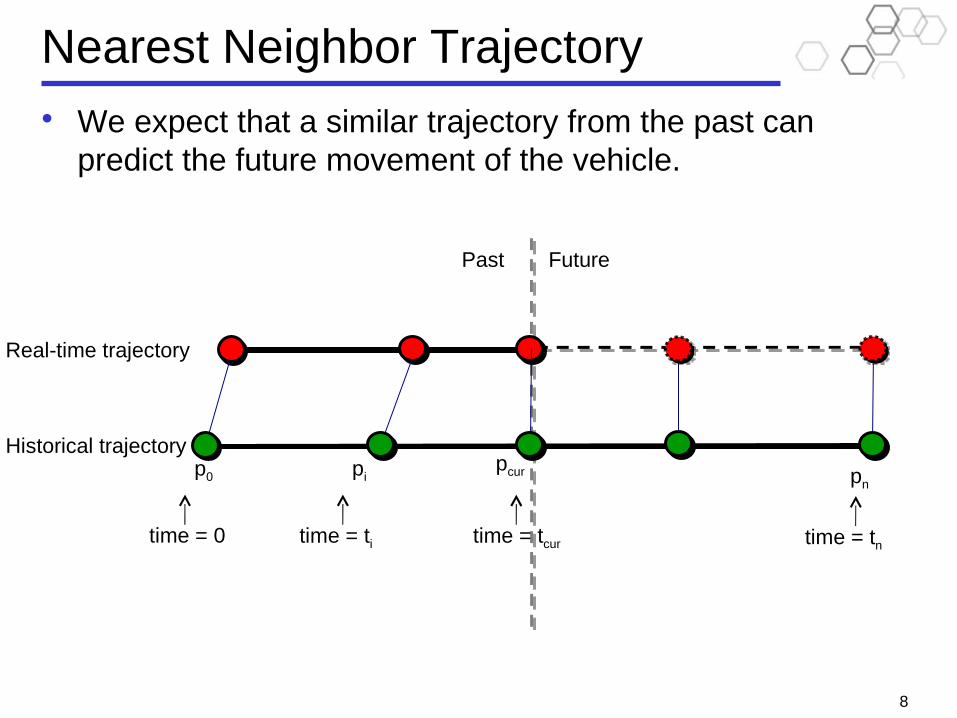
Nearest Neighbor Trajectory• We expect that a similar trajectory from the past can
predict the future movement of the vehicle.
pn
time = 0 time = tcurtime = ti time = tn
p0 pipcur
Real-time trajectory
Historical trajectory
9
Problem Statement• Travel-time prediction by similar historical trajectories
Define a similarity (distance) measure d that enables the selection of the most similar historical trajectory (NNT), which would serve as an accurate predictor of the vehicle’s future movement.
• Efficient similar historical trajectory retrieval. Retrieve the trajectory from the database that minimizes d
between a historical and the (partial) real-time trajectory. Enable variable-length queries. Incrementally update the NNT as new points arrive in the real-time
trajectory. Do this efficiently!
10
Outline• Problem statement
Data representation Nearest neighbor trajectories
• Similarity measures for trajectories of vehicles• Similarity search• Results• Conclusion

11
Similarity Measures–Requirements • Fundamental assumption: similar past implies similar
future.• A distance, or similarity, measure is needed for finding a
historical trajectory to predict the future movement.• Requirements for similarity/distance measures
support comparison of fixed-length trajectories support sub-trajectories is a metric amenable to efficient, scalable computation enable prioritization of either long- or short-term prediction
12
Weighted LP Distance (WLP)• Weighted Euclidean Distance
efficient to compute can be applied to sub-trajectories outliers are tolerated to some extent (controlled by varying P) weights can be added to prioritize the past segments that are
more relevant for the prediction of the future
• We use a weighted LP-norm based distance
The Δti are from the real-time trajectory and the Δti’ are from a historical trajectory.
stopsnumber of
ttwWLP
Piii∑ ∆−∆
=)'(
13
Correlation-Based Weights• Trajectory representation
• The weight wi for segment i is the sum of the correlation coefficients kij, j=cur+1,... cur+k, where k is the number of future segments to be predicted
We propose to use the Kendall τ rank correlation coefficient
Rptpf iii ∈∆= ,)(tr
∑+
+=
=kcur
curjiji kw
1
||
14
Outline• Problem statement
Data representation Nearest neighbor trajectories
• Similarity measures for trajectories of vehicles• Similarity search• Results• Conclusion
15
Prediction by Nearest Neighbor• Dynamically choose a trajectory from the available
database that minimizes WLP.
NNT is the initial trajectory
while the vehicle is on the route do
Receive a new position (p,t) on tr
Evaluate d = WLP(NNT,tr)
if d exceeds threshold thr
then find a new NNT that minimizes WLP
provide NNT as the new prediction
end while

16
List-Based Indexing• Assumptions
A trajectory is a sequence (Δt1, …, Δtn), where Δti represents the travel time for the ith segment of the route.
Each trajectory is of length n. (In most cases) there does exist a trajectory in the database that is
similar to the current real-time trajectory (i.e., trajectories are non-random).
• Requirements The index must be able to answer queries of varying length. The search should be incremental. Perfect precision is required (the most similar trajectory must be
found).

17
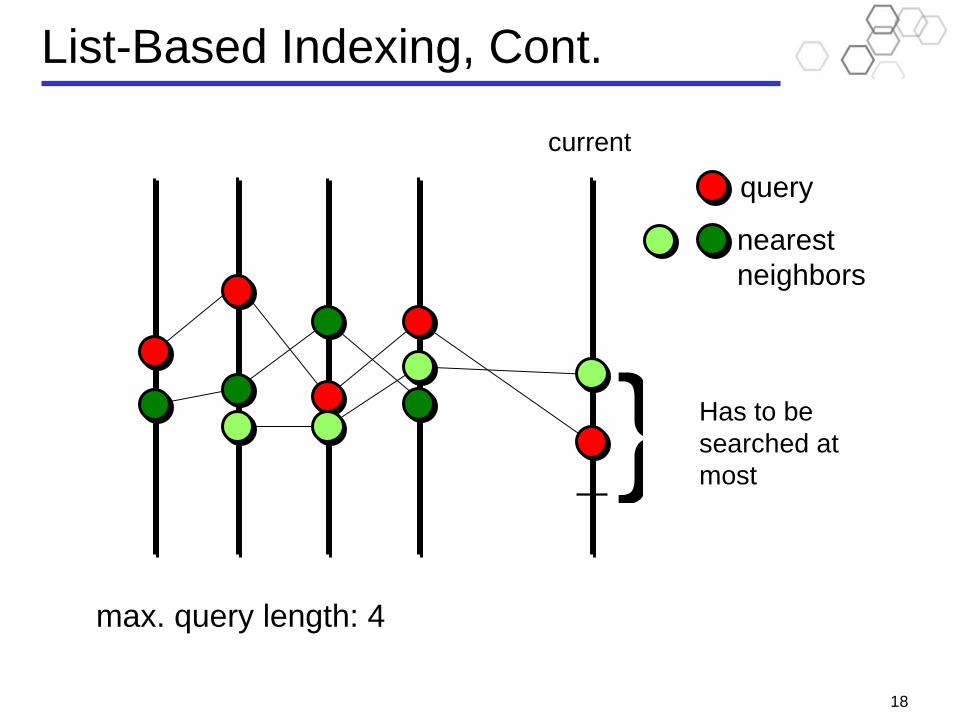
List-Based Indexing, Cont.• Data structure
A sorted list for each timing point on the route, and an entry in each list for each trajectory.
Random access is possible (a sequential-access algorithm exists as well).• Non-incremental algorithm
Perform binary search in each corresponding list and locate the points that are closest to the query points.
Access each list simultaneously (next closest point) and calculate the distances to the accessed trajectories.
Track the current NNT (i.e., the NNT seen so far): the trajectory that is within the minimum distance from the query trajectory.
Calculate bound: the distance in-between the query trajectory and the set of the most recently accessed entries in each list. This is the minimum possible distance to the query so far.
Stop when the bound exceeds the distance to the current NNT.• Incremental algorithm
When a new point arrives, re-use the bound calculated in the previous iteration.
18
Has to be searched at most
List-Based Indexing, Cont.
query
nearest neighbors
max. query length: 4
current
}
19
Outline• Problem statement
Data representation Nearest neighbor trajectories
• Similarity measures for trajectories of vehicles• Similarity search• Results• Conclusion
Empirical Evaluation• Both real and generated data were used.
In the generated data, the clustering of the data, the average variance of the travel times, and the size of the database were varied.
• Evaluation of similarity measures (accuracy of prediction). Euclidean, weighted Euclidean distance (including pre-set and correlation
based weights), and LCSS distances were evaluated. Correlation-based weights give the most accurate prediction. The optimal query length is around 5.
• Evaluation of performance. ITA (iterative threshold algorithm), TA (threshold algorithm), and SS
(sequential scan) were compared. In most cases ITA outperforms TA and SS by the orders of magnitude,
especially when queries are long (more than 5 points), and the clusters in the data exist.
SS can be beneficial with non-clustered (e.g., random) data.

21
Conclusions• Fundamental assumption: A similar past trajectory can
predict the future trajectory of a vehicle.• We have proposed
to use a weighted LP norm-based distance (WLP) as a trajectory similarity measure (more measures are discussed in the paper)
to index the trajectories with a sorted list-based index and to access them using an Iterative Threshold Algorithm (ITA)
• Experimental results suggest that the correlation-based WLP together with ITA yields vehicle travel time prediction that is satisfactorily accurate and efficient.
22
Future Work• Currently
Dynamic choice of the nearest neighbor trajectory (NNT) that minimizes the distance to the real-time trajectory.
• Proposed extension Dynamic choice of the prediction algorithm (including NNT) that
minimizes the real-time trajectory prediction error.
Thank you for your attention.

24
Related Work• Existing approaches to travel time prediction
Autoregressive models/Kalman filtering
[Shalaby and Farhan 2001, Cathey and Dailey 2003, Dailey et al. 2004, Mishalani 2008]
Machine learning:
Artificial Neural Networks
[Chien et al. 2002, Park et al. 2004, Hee and Rilett 2004]
Support Vector Machines [Bin et al. 2006]
Historical speed/time patterns
[Predic et al. 2007, Sun et al. 2007].
25
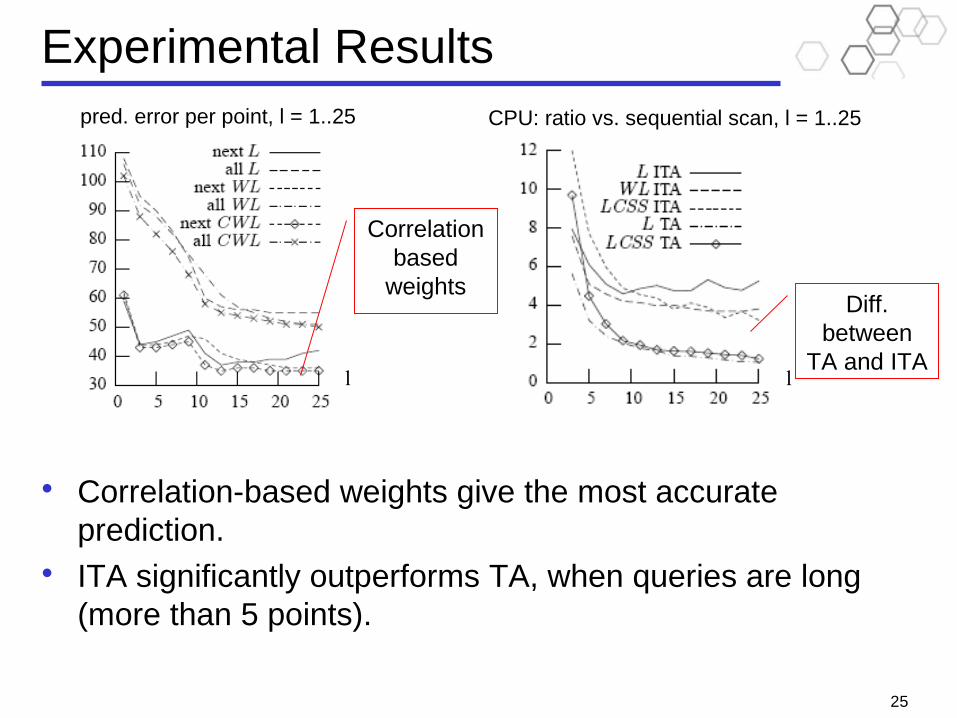
Experimental Results
• Correlation-based weights give the most accurate prediction.
• ITA significantly outperforms TA, when queries are long (more than 5 points).
pred. error per point, l = 1..25 CPU: ratio vs. sequential scan, l = 1..25
l l
Diff. between
TA and ITA
Correlation based
weights
Related Documents











