PENGEMBANGAN ROBOT MOBIL OTONOM MENGGUNAKAN SISTEM KENDALl FUZZY DAN JARINGAN SYARAF TIRUAN M. Syamsa Ardisasmita' ABSTRAK PENGEMBANGAN ROBOT MOBIL OTONOM MENGGUNAKAN SISTEM KENDALl FUZZY DAN JARINGAN SY ARAF TIRUAN. Telah direalisasikansistem navigasi robot mobil otonomberbasis pengendali mikro PIC 16C57 menggunakan sistem kendali fuzzy dan jaringan syaraf tiruan. Realisasiperilaku otonom pada robot mobil membutuhkan perumusanaturan-aturan yang bertindak secara kolektif untuk menghasilkan tingkat-tingkat kecerdasan. Kami menggunakan metoda perbedaan pelatihan bersaing dan teknik pengelompokan ruang-hasil untuk membangkitkan aturan-aturan juzzy-associative-memory (F AM) yang sesuai dengan data pelatihan yang diambil daTi simulasifuzzy dan simulasi jaringan. Sebagai variabel masukan adalahsudut arabrobotdan koordinat posisinya dan sebagai variabel keluaran adalahsinyalsudut-pengarah. Tujuan daTi pengendalian ini adalah menggerakkan robot mobil mencapai terminal pengangkut pada sudut dan posisi robot tepatpada terminal pengangkut yang diinginkan. Sistemkendalijaringan terdiri daTi dua jaringan syaraf:jaringan pengendali dan jaringan emulator. Jaringan pengendali menghasilkan keluaran berupasinyalsudut-pengarah sedangkan jaringan emulator akan menghitungposisi berikutnya daTi robot. Pada setiaptingkat, sistemkendali fuzzy dan jaringan syarafakan menghasilkan sudutpengarah yang akan menuntun robot mobil daTiposisi awal menujuposisi terminaldaTi berbagai sudut arabpengangkutan. Dipelajari juga kepekaan dan kehandalan pengendali dengan mengevaluasi tingkatkegagalan. Kata Kunci: Robotmobil, logika fuzzy, jaringan syaraf ABSTRACT THE DEVELOPMENT OF AUTONOMOUS MOBILE ROBOT USING FUZZY CONTROL SYSTEM AND ARTIFICIAL NEURAL NETWORK. Autonomous mobile robot navigation basedon PIC 16C57 rnicrocontroller has been realizedusing fuzzy logic control and neural network systems.Realization of autonomous behavior in mobile robot requires formulation of rules which are collectively responsible for necessary levels of intelligence. We use differential competitive learning and the product-space clustering techniqueto adaptively generate fuzzy-associative-memory (FAM) rules from training data takenfrom the fuzzy and neural simulations. The input variables werethe robot angleand the position coordinate and the outputvariablewas the steering-angle signal. The goal wasto make mobile robotarrive at the loading dock at a right angle and to align the position of the robot with the desired loadingdock. The neuralcontrol system consisted of two neural networks: the controller network andthe emulator network.The controller network produced an appropriate steering-angle signal outputand the emulator networkcomputed the next position of the robot. At every stage, the fuzzy and neural controllersshouldproduce the steering angle that move up the mobile robot to the loading dock from initial positionand from anyangle in the loadingzone. We studied the sensitivity andthe robustness of the controller by examining failure rates. Key words: Mobile robot, fuzzy logic, neural network. Pusat Pengembangan Teknologi Informasi clan Komputasi -BAT AN 157

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
PENGEMBANGAN ROBOT MOBIL OTONOM MENGGUNAKANSISTEM KENDALl FUZZY DAN JARINGAN SYARAF TIRUAN
M. Syamsa Ardisasmita'
ABSTRAK
PENGEMBANGAN ROBOT MOBIL OTONOM MENGGUNAKAN SISTEM KENDALlFUZZY DAN JARINGAN SY ARAF TIRUAN. Telah direalisasikan sistem navigasi robot mobilotonom berbasis pengendali mikro PIC 16C57 menggunakan sistem kendali fuzzy dan jaringan syaraftiruan. Realisasi perilaku otonom pada robot mobil membutuhkan perumusan aturan-aturan yangbertindak secara kolektif untuk menghasilkan tingkat-tingkat kecerdasan. Kami menggunakan metodaperbedaan pelatihan bersaing dan teknik pengelompokan ruang-hasil untuk membangkitkan aturan-aturanjuzzy-associative-memory (F AM) yang sesuai dengan data pelatihan yang diambil daTi simulasi fuzzy dansimulasi jaringan. Sebagai variabel masukan adalah sudut arab robot dan koordinat posisinya dan sebagaivariabel keluaran adalah sinyal sudut-pengarah. Tujuan daTi pengendalian ini adalah menggerakkan robotmobil mencapai terminal pengangkut pada sudut dan posisi robot tepat pada terminal pengangkut yangdiinginkan. Sistem kendali jaringan terdiri daTi dua jaringan syaraf: jaringan pengendali dan jaringanemulator. Jaringan pengendali menghasilkan keluaran berupa sinyal sudut-pengarah sedangkan jaringanemulator akan menghitung posisi berikutnya daTi robot. Pada setiap tingkat, sistem kendali fuzzy danjaringan syaraf akan menghasilkan sudut pengarah yang akan menuntun robot mobil daTi posisi awalmenuju posisi terminal daTi berbagai sudut arab pengangkutan. Dipelajari juga kepekaan dan kehandalanpengendali dengan mengevaluasi tingkat kegagalan.
Kata Kunci: Robot mobil, logika fuzzy, jaringan syaraf
ABSTRACT
THE DEVELOPMENT OF AUTONOMOUS MOBILE ROBOT USING FUZZYCONTROL SYSTEM AND ARTIFICIAL NEURAL NETWORK. Autonomous mobile robotnavigation based on PIC 16C57 rnicrocontroller has been realized using fuzzy logic control and neuralnetwork systems. Realization of autonomous behavior in mobile robot requires formulation of ruleswhich are collectively responsible for necessary levels of intelligence. We use differential competitivelearning and the product-space clustering technique to adaptively generate fuzzy-associative-memory(F AM) rules from training data taken from the fuzzy and neural simulations. The input variables were therobot angle and the position coordinate and the output variable was the steering-angle signal. The goalwas to make mobile robot arrive at the loading dock at a right angle and to align the position of the robotwith the desired loading dock. The neural control system consisted of two neural networks: the controllernetwork and the emulator network. The controller network produced an appropriate steering-angle signaloutput and the emulator network computed the next position of the robot. At every stage, the fuzzy andneural controllers should produce the steering angle that move up the mobile robot to the loading dockfrom initial position and from any angle in the loading zone. We studied the sensitivity and the robustnessof the controller by examining failure rates.
Key words: Mobile robot, fuzzy logic, neural network.
Pusat Pengembangan Teknologi Informasi clan Komputasi -BAT AN
157
Risalah Lokakarya Komputasi dalam Sains dan Teknologi Nuklir XIV, Juli 2003 (157-170)
PENDAHULUAN
Robot berasal dari bahasa Cekoslowakia "robota" yang berarti pelayan atautenaga kasar, adalah mesin yang dapat bekerja sendiri tanpa kendali atau campurtangan manusia dan biasanya pergerakannya meniru pergerakan sendi-sendi manusia.Robot dibuat untuk melakukan pekerjaan yang bersifat berulang (repetitif),membosankan, kotor, berbahaya dan memerlukan ketekunan yang tinggi. Dalamperkembangannya, robot dewasa ini bukan hanya mesin yang melakukan gerakan-gerakan berulang tetapi telah melibatkan kecerdasan dan keluwesan. Perkembanganteknik kendali dan otomatisasi yang didukung oleh teknologi informatika dan mikro-elektronika telah melahirkan robot sebagai suatu perangkat industri yang dapatmeningkatkan produktivitas, standar mutu, efisiensi dan dapat menyelesaikanpekerjaan yang tidak dapat dilakukan sebelumnya oleh manusia, seperti robot untukdekontaminasi radiasi atau robot untuk menjelajah permukaan planet Mars (Rover).
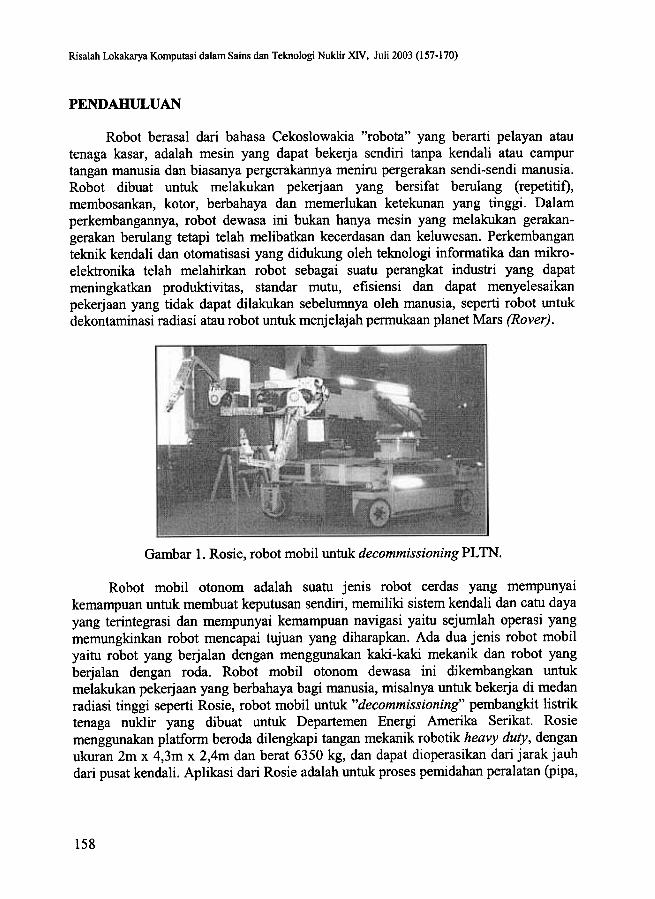
Gambar 1. Rosie, robot mobil untuk decommissioning PLTN.
Robot mobil otonom adalah suatu jenis robot cerdas yang mempunyaikemampuan untuk membuat keputusan sendiri, memiliki sistem kendali dan catu dayayang terintegrasi dan mempunyai kemampuan navigasi yaitu sejumlah operasi yangmemungkinkan robot mencapai tujuan yang diharapkan. Ada dua jenis robot mobilyaitu robot yang berjalan dengan menggunakan kaki-kaki mekanik dan robot yangberjalan dengan roda. Robot mobil otonom dewasa ini dikembangkan untukmelakukan pekerjaan yang berbahaya bagi manusia, misalnya untuk bekerja di medanradiasi tinggi seperti Rosie, robot mobil untuk "decommissioning" pembangkit listriktenaga nuklir yang dibuat untuk Departemen Energi Amerika Serikat. Rosiemenggunakan platform beroda dilengkapi tangan mekanik robotik heavy duty, denganukuran 2m x 4,3m x 2,4m dan berat 6350 kg, dan dapat dioperasikan daTi jarak jauhdaTi pusat kendali. Aplikasi daTi Rosie adalah untuk proses pemidahan peralatan (pipa,
158
Pengembangan Robot Mobil Otonom Menggunakan Sistern Kendali Fuzzy clan Jaringan (M. Syamsa Ardisasmita)
bejana, dll.), pembongkaran reaktor nuklir, dekontaminasi dan pembongkaran hotcell/glove box, penanganan dan pengangkutan sampah, dan dekontaminasi dinding danlantai ruang reaktor.
Navigasi robot otonom berarti kemampuan suatu robot untuk bergerak menujutujuan tanpa campur tangan manusia dalam suatu lingkungan yang tidak khususdirekayasa untuk lintasan langkahnya. Dalam mencapai tingkat otonomi dibutuhkansistem kendali jenis pintar. Beberapa arsitektur telah dikembangkan untuk navigasirobot otonom yaitu : (1) Arsitektur terhirarki yaitu membagi fungsi robot ke dalamlapisan tingkat-tinggi (model dan perencanaan) dan lapisan tingkat rendah (penginderadan pengeksekusi); (2) Arsitektur berbasis perilaku yaitu merealisasikan perilakukompleks dengan mengkombinasikan unit-unit yang dihasilkan daTi beberapa perilakusederhana; dan (3) Arsitektur campuran (hybrid) yaitu dengan mengkombinasikankedua perilaku di atas. Kami mengembangkan arsitektur navigasi robot mobil berbasisperilaku yaitu menggunakan sistem kendali fuzzy dan sistem kendali jaringan syaraf.Kedua sistem kendali tersebut menggunakan pendekatan stokastik yang tidakmembutuhkan komputasi kompleks seperti pada kendali Pill (Proportional Integral &Derivative) yang umum digunakan pada saat ini. Untuk objek penelitian digunakanrobot edukatif yaitu robot mobil yang dilengkapi dengan tangan kinematik yangmemiliki empat poros gerakan dengan tiga derajat kebebasan. Sebagai otak robotdigunakan Basic Stamp II dengan pengendali mikro PIC 16C57.
PRINSIP KERJA
Pada robot sering digunakan istilah-istilah untuk menunjukkan geometri danspesifikasi robot seperti "poros gerakan" dan "derajat kebebasan". Setiap bendabergerak berarti menempuh jarak dari satu titik ke titik lain yang berada pada satubidang. Pergerakan ini mempunyai garis sumbu atau titik yang tidak berubah yangdisebut poros. Jadi poros gerakan merupakan titik atau pusat terjadinya gerakan.Derajat kebebasan adalah jumlah arab bebas (independent) dari suatu robot (endeffector) yang menentukan arab dari pergerakannya. Parameter-parameter yangbertindak sebagai variabel masukan dari robot mobil adalah koordinat posisi (x, y)yaitu titik pusat robot dan sudut arab ~ yaitu sudut antara sumbu x dengan poros robot.Sebagai variabel keluarannya adalah sinyal sudut-pengarah e yaitu sudut antara porosdengan arab roda. Tujuan daTi sistem pengendali navigasi ini adalah bagaimanamenggerakkan robot agar mencapai terminal pengangkut (loading dock) pada posisidan sudut yang tepat (~r = 90). Hal ini dilakukan dengan meluruskan posisi dari robot
(x, y) dengan posisi terminal pengangkut yang diinginkan (xr, Yr).
159
Risalah Lokakarya Kornputasi dalam gains dan Teknologi Nuklir XIV, Juli 2003
(x, Wht,-el
Back Whee]
"
if ,.,-,"
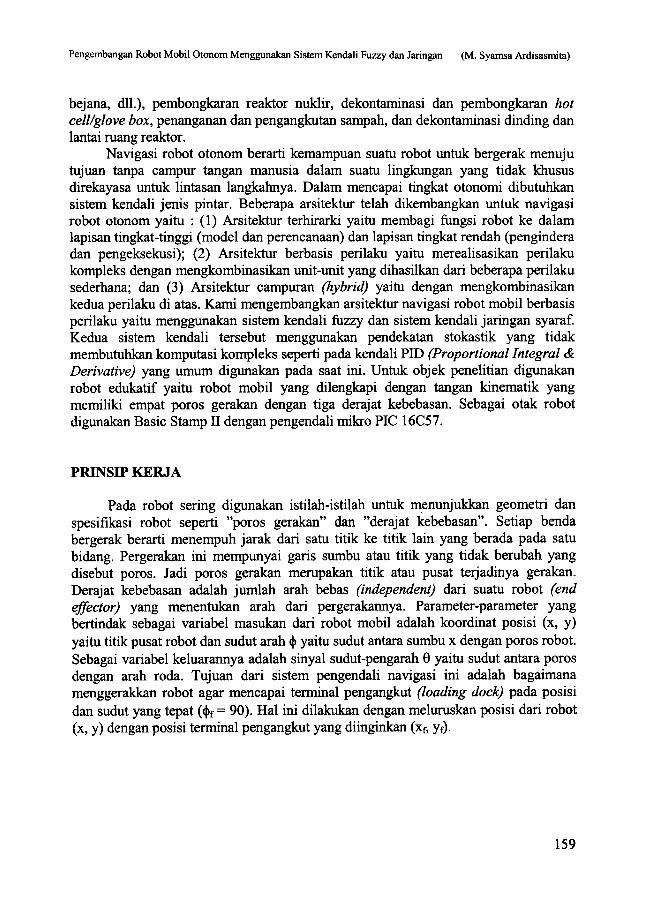
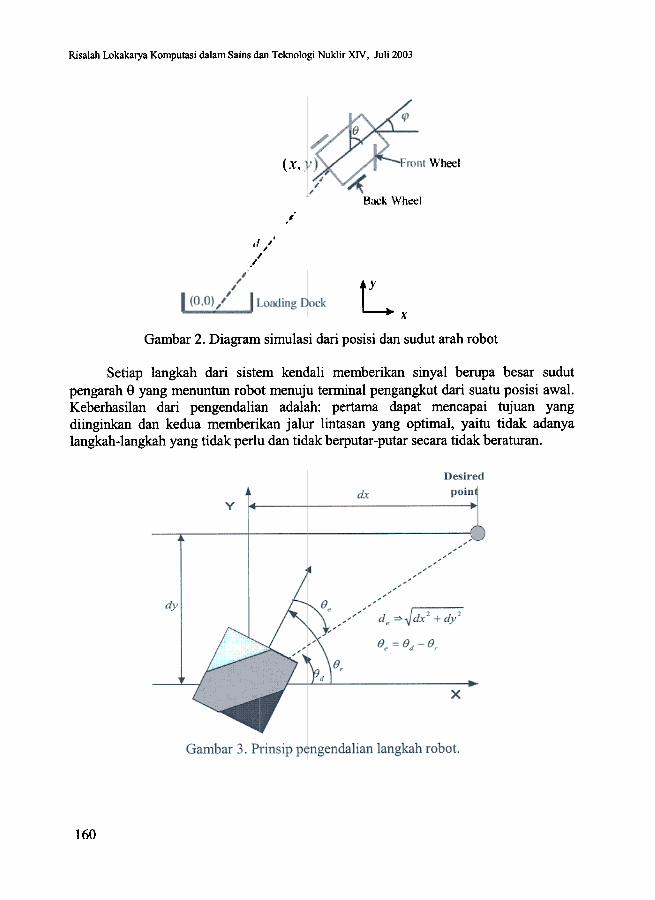
L.xGambar 2. Diagram simulasi dari posisi dan sudut arab robot
Setiap langkah daTi sistem kendali memberikan sinyal berupa besar sudutpengarah e yang menuntun robot menuju terminal pengangkut daTi suatu posisi awal.Keberhasilan daTi pengendalian adalah: pertama dapat mencapai tujuan yangdiinginkan dan kedua memberikan jalur lintasan yang optimal, yaitu tidak adanyalangkah-langkah yang tidak perlu dan tidak berputar-putar secara tidak beraturan.
160
Pengernbangan Robot Mobil Otonom Menggunakan Sistem Kendali Fuzzy dan Jaringan (M. Syamsa Ardisasmita)
Sistem kendali akan menghitung kesalahan sikap tubuh (posture) untuk setiaplangkah. Kesalahan sikap tubuh adalah selisih antara sikap yang diinginkan (x d, y d,8d) dengan sikap aktual (x r, Y r, 8J. Kemudian dapat kita hitung kesalahan pada
orientasi (8e = 8d -8J clan kesalahan jarak (de = ~d~-~). Tujuan pengendalian
adalah melakukan koreksi arab robot clan mengatur kecepatan roda kiri clan roda kanansedemikian sehingga kesalahan sikap tubuh dapat dihilangkan. Jika kesalahannyabesar maka sinyal sudut pengarah juga hams besar clan jika kesalahannya kecil makasinyal sudut pengarah juga kecil.
Sistem Kendall Fuzzy
Sistem kendali fuzzy adalah sistem berbasis pengetahuan yang dirumuskandalam bentuk aturan-aturan (rules base) sebagai akumulasi daTi suatu pengalaman.Logika fuzzy dikembangkan pertama kali oleh Dr. Lotti A. Zadeh (1965) untukmerumuskan secara matematik konsep ketidak pastian atau kesamaran sehingga dapatdiproses oleh komputer. Dengan menerapkan logika fuzzy pada program komputer,sistem kendali dapat memutuskan seperti cara manusia berpikir. Kemampuan inilahyang disebut sebagai kecerdasan buatan pada sistem kepakaran fuzzy.
Pa~ ~~k2ll!: :.O!;:.t~!- --IIIIII
Defuzzification .Inference Mecllauism Fuzzificatioll II~r '
Controlactions
.II.I '"'
~Systemvariables
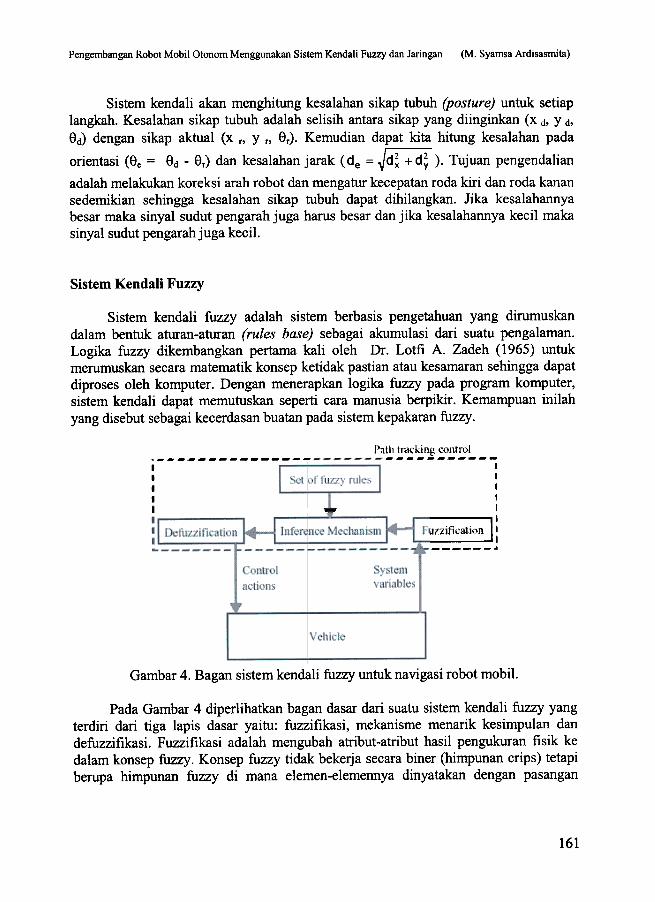
Gambar 4. Bagan sistem kendali fuzzy untuk navigasi robot mobil.
Pada Gambar 4 diperlihatkan bagan dasar daTi suatu sistem kendali fuzzy yangterdiri daTi tiga lapis dasar yaitu: fuzzifikasi, mekanisme menarik kesimpulan dandefuzzifikasi. Fuzzifikasi adalah mengubah atribut-atribut basil pengukuran fisik kedalam konsep fuzzy. Konsep fuzzy tidak bekerja secara biner (himpunan crips) tetapiberupa himpunan fuzzy di mana elemen-elemennya dinyatakan dengan pasangan
161
Risalah Lokakarya Komputasi dalam gains dan Teknologi Nuklir XIV, Juli 2003
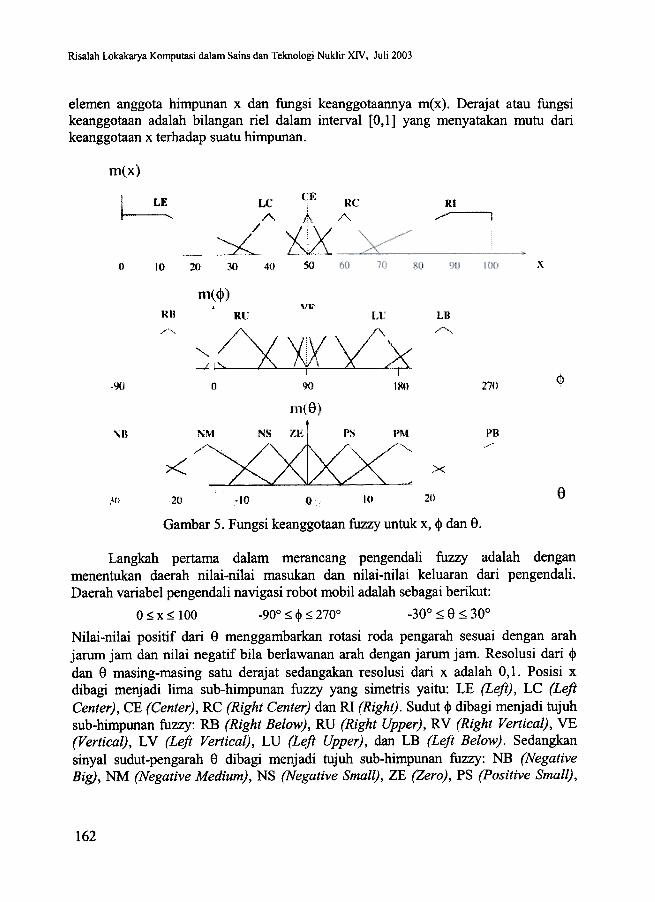
elemen anggota himpunan x dan fungsi keanggotaannya m(x). Derajat atau fungsikeanggotaan adalah bilangan riel dalam interval [0,1] yang menyatakan mutu darikeanggotaan x terhadap suatu himpunan.
m(x)C1-:
/:"~-~ LC/"
RCA
RI/ i
/
~
50
::~~
30-20 x0 10 40
m«1»JVE LV
l A'"R8
,,'-',
R\'
,;\\
RU
l('y~ Y ~0 90 180
m(e)NS Z1': PS I'M
/""-"
-10 (I 10
LV
j\LB~
<P27{)-90
NM,/"'" PH,/'~n
><><
e20.\() 20
Gambar 5. Fungsi keanggotaan fuzzy untuk x, cj> dan e.
Langkah pertama dalam merancang pengendali fuzzy adalah denganmenentukan daerah nilai-nilai masukan clan nilai-nilai keluaran daTi pengendali.Daerah variabel pengendali navigasi robot mobil adalah sebagai berikut:
0 ~ x ~ 100 -900 ~ <I> ~ 2700 -300 ~ e ~ 300
Nilai-nilai positif daTi e menggambarkan rotasi roda pengarah sesuai dengan arabjarum jam clan nilai negatif bila berlawanan arab dengan jarum jam. Resolusi daTi 4>clan e masing-masing satu derajat sedangakan resolusi daTi x adalah 0, I. Posisi xdibagi menjadi lima sub-himpunan fuzzy yang simetris yaitu: LE (Left), LC (LeftCenter), CE (Center), RC (Right Center) clan Rl (Right). Sudut 4> dibagi menjadi tujuhsub-himpunan fuzzy: RB (Right Below), RV (Right Upper), RV (Right Vertical), VE(Vertical), LV (Left Vertical), LV (Left Upper), dan LB (Left Below). Sedangkansinyal sudut-pengarah e dibagi menjadi tujuh sub-himpunan fuzzy: NB (NegativeBig), NM (Negative Medium), NS (Negative Small), ZE (Zero), PS (Positive Small),
162
Pengembangan Robot Mobil Otonom Menggunakan Sistem Kendali Fuzzy dan Jaringan (M. Syarnsa Ardisasmita)
PM (Positive Medium), dan PB (Positive Big). Fungsi keanggotaan fuzzy padaaplikasi ini diambil linier berbentuk segitiga untuk menyederhanakan perhitungan.Gambar 5 adalah grafik fungsi keanggotaan untuk setiap himpunan fuzzy di atas.Sebagai contoh, untuk e = 20°, diperoleh kualitas keanggotaannya adalah 0,5 (50%)
untuk sub-himpunan PM dan 0,3 (30%) untuk sub-himpunan PH. Sub-himpunan fuzzyCE, VE dan ZE dibuat lebih sempit daripada sub-himpunan yang lain agarmemungkinkan pengendalian langkah dapat lebih halus di dekat terminal pengangkut.
X
CELE LC RC !{I
" 5PM PM
PM
RB PS PO PB
NS PS PHRl
NS PSC'"C", cc,lq,' ci'cNM , ~E',~~.d!= -
RV NM PM
cI>NMVE PM
NS
NO NM
NB
PSLV
NB NM NS
LB NB NMNB NM
Gambar 6. Aturan-atur~n Fuzzy (FAM).
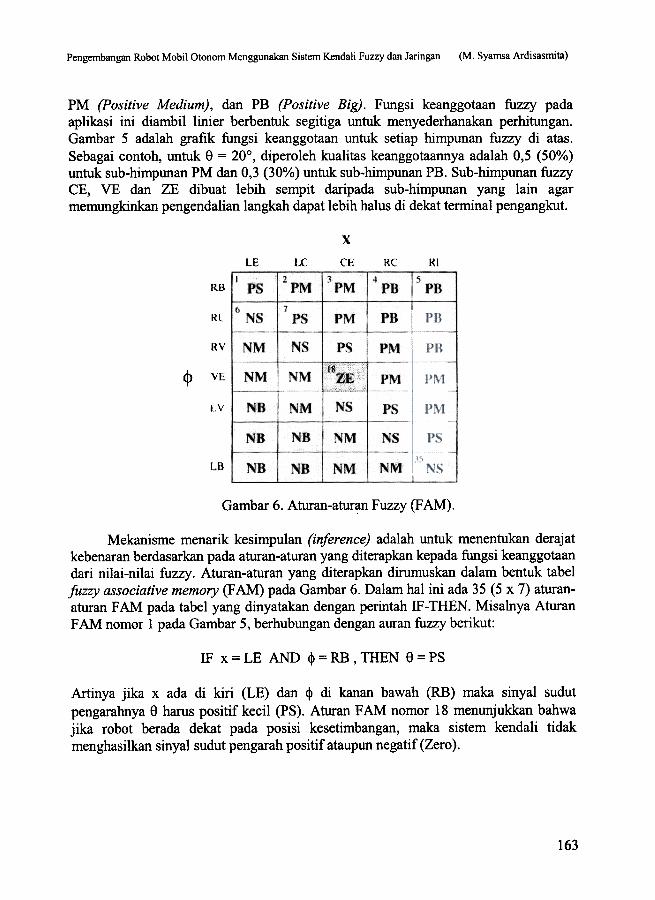
Mekanisme menarik kesimpulan (inference) adalah untuk menentukan derajatkebenaran berdasarkan pada aturan-aturan yang diterapkan kepada fungsi keanggotaandaTi nilai-nilai fuzzy. Aturan-aturan yang diterapkan dirumuskan dalam bentuk tabelfuzzy associative memory (FAM) pada Gambar 6. Dalam hal ini ada 35 (5 x 7) aturan-aturan F AM pada tabel yang dinyatakan dengan perintah IF-THEN. Misalnya AturanFAM nomor 1 pada Gambar 5, berhubungan dengan auran fuzzy berikut:
IF x=LE AND <j>=RB, THEN e =PS
Artinya jika x ada di kiri (LE) clan <I> di kanan bawah (RB) maka sinyal sudutpengarahnya e harus positif kecil (PS). Aturan F AM nomor 18 menunjukkan bahwajika robot berada dekat pada posisi kesetimbangan, maka sistem kendali tidakmenghasilkan sinyal sudut pengarah positif ataupun negatif (Zero).
163
Risalah Lokakarya Komputasi dalam gains clan Teknologi Nuklir XIV, Juli 2003
FAM Rule 13 (RV,CE;PS)
~ I':~RV AND x:CE.,
THEN 6=PS.~~~
mtx)fc..: ,4\
m(cII) m(9) PS
1ARV/,\j .
(~)13/I ! "\.\
1L
L..$ ""CO;, .II
FAM Rule 18 (VE,CE;ZE)
IF IjJ=VE AND x=CE,
THEN 6:ZE. °18
m«!I>
VE
tI>
input <!J input xm(9)
t I)
centroid output
Gambar 7. Pengambilan kesimpulan korelasi minimum dan defusifikasi centroid.
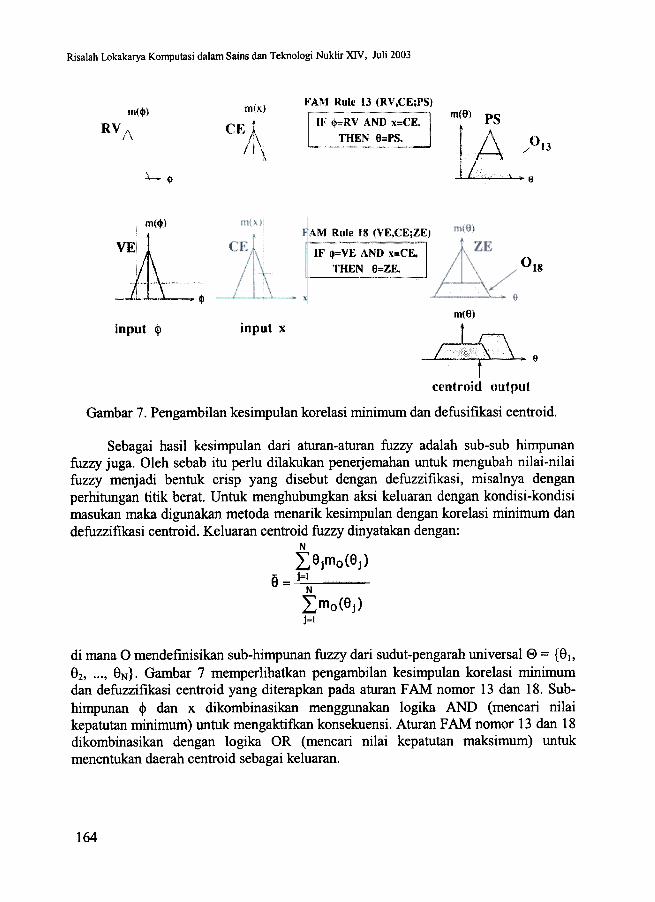
Sebagai basil kesimpulan daTi aturan-aturan fuzzy adalah sub-sub himpunanfuzzy juga. Oleh sebab itu perlu dilakukan penerjemahan untuk mengubah nilai-nilaifuzzy menjadi bentuk crisp yang disebut dengan defuzzifikasi, misalnya denganperhitungan titik berat. Untuk menghubungkan aksi keluaran dengan kondisi-kondisimasukan maka digunakan metoda menarik kesimpulan dengan korelasi minimum dandefuzzifikasi centroid. Keluaran centroid fuzzy dinyatakan dengan:
N
2:8jmoC8j)- j-l8= -N
Lmo(8j)j;J
di mana 0 mendetinisikan sub-himpunan fuzzy daTi sudut-pengarah universal e = {e\,
e2, ..., eN}, Gambar 7 memperlihatkan pengambilan kesimpulan korelasi minimumdan defuzzitikasi centroid yang diterapkan pada aturan FAM nomor 13 dan 18. Sub-himpunan <I> dan x dikombinasikan menggunakan logika AND (mencari nilaikepatutan minimum) untuk mengaktifkan konsekuensi. Aturan F AM nomor 13 dan 18dikombinasikan dengan logika OR (mencari nilai kepatutan maksimum) untukmenentukan daerah centroid sebagai keluaran.
164
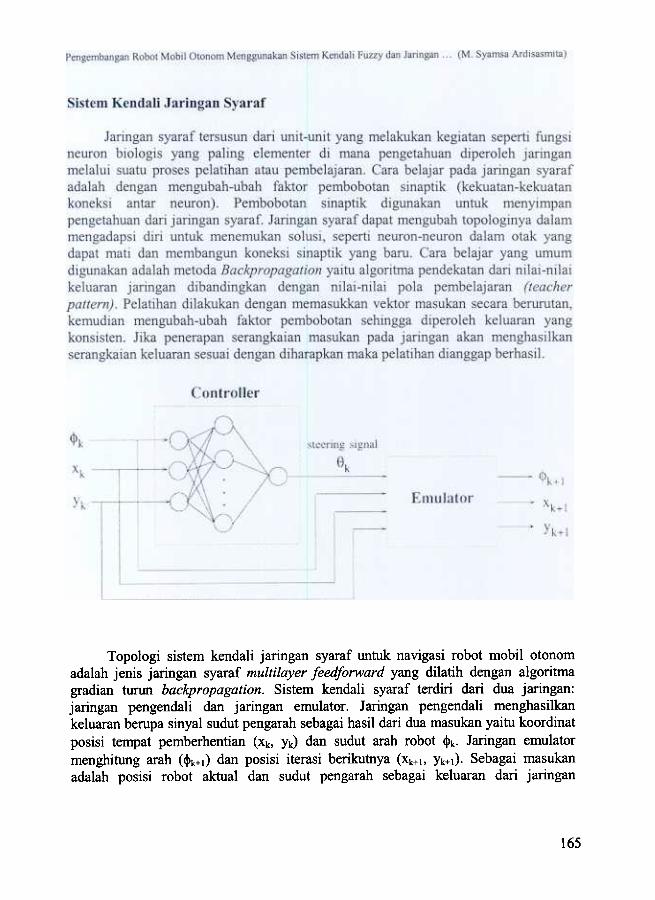
Topologi sistem kendali jaringan syaraf untuk navigasi robot mobil otonomadalah jenis jaringan syaraf multilayer feedforward yang dilatih dengan algoritmagradian turun backpropagation. Sistem kendali syaraf terdiri dari dua jaringan:jaringan pengendali clan jaringan emulator. Jaringan pengendali menghasilkankeluaran berupa sinyal sudut pengarah sebagai basil dari dua masukan yaitu koordinatposisi tempat pemberhentian (Xk, yJ clan sudut arab robot <Pk. Jaringan emulatormenghitung arab «Pk+J clan posisi iterasi berikutnya (Xk+l, Yk+J. Sebagai masukanadalah posisi robot aktual clan sudut pengarah sebagai keluaran dari jaringan
165
Risalah Lokakarya Komputasi dalam Sains dan Teknologi Nuklir XN, Juli 2003
pengendali. Jaringan pengendali memiliki 24 jaringan tersembunyi (hidden networks)dengan fungsi logistik berbentuk sigmoid. Pelatihan hanya dilakukan pada jaringanpengendali yaitu dengan metoda backpropagation. Kami melakukan estimasi sinyalsudut pengarah ideal yang dihasilkan oleh suatu pengendali fuzzy. Lintasan robotberbentuk busur dari suatu pengendali fuzzy digunakan sebagai lintasan ideal clankemudian digunakan sebagai data pelatihan dari jaringan pengendali.,
Kami tidak melakukan pelatihan pada jaringan emulator karena sulit untukmemperoleh koneksi pemboboton sinapsis universal. Algoritma pelatihanbackpropagation temyata tidak dapat konvergen untuk beberapa contoh himpunandata pelatihan. Sebab itu maka digunakan persamaan kinetika sederhana untukmenggatikan peran jaringan emulator. Jika robot bergerak dari posisi (x, y) menujuposisi (x', y') dalam suatu iterasi, maka diperoleh:
Xk+l = Xk + r COS ci>k
Yk+l = Yk + r sin <Pk
<Pk+l = <Pk + 8k
dengan r adalah jarak lintasan tetap daTi robot untuk setiap langkah gerakan.
BASIL DAN DISKUSI
Untuk percobaan ini digunakan robot edukatif yaitu robot mobil yangdilengkapi dengan tangan kinematik dengan empat poros gerakan dan tiga derajatkebebasan. Mekanik penggerak dari robot adalah motor DC dan motor servo yangkecepatan dan posisi rotasinya dapat diatur dengan menggunakan sinyal modulasilebar pulsa (pulse width modulation). Umumnya pada lebar pulsa 0,5 milidetik akanmenggerakkan poros motor servo pada posisi paling kiri (-90°) dan pada lebar pulsa2,5 milidetik akan menggerakkan poros motor servo pada posisi paling kanan (+90°).Untuk kecepatan pergerakan robot digunakan motor DC dan untuk pengaturan sudutpengarah roda digunakan motor servo.
Sebagai perangkat pengendali digunakan Basic Stamp II dengan pengendalimikro PIC l6C57 yang dapat diprogram menggunakan bahasa pemrograman Pbasic2.Basic Stamp II merupakan rangkaian terpadu yang dibuat oleh perusahaan ParallaxInc. Perangkat ini dapat diprogram dengan komputer melalui saluran I/O serial RS232. Basic Stamp II memiliki dua jenis memori: EPROM untuk menyimpan programoperasi dan RAM untuk menyimpan program aplikasi.
166
Pengembangan Robot Mobil Otonom Menggunakan Sistem Kendali Fuzzy daD Jaringan (M. Syarnsa Ardisasmita)
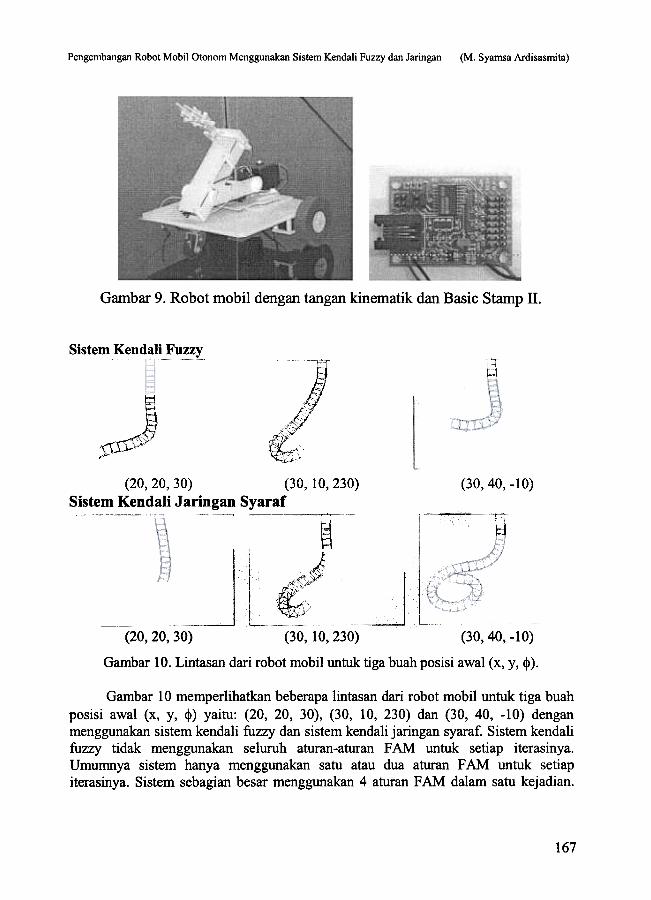
Gambar 9. Robot mobil dengan tangan kinematik dan Basic Stamp II.
Sistem Kendall Fuzzy
§
J1""
"1!:t7.'~~jY'r~' ,.'"~~;...;,...,,'
~~1
~ ,~7\}. ' .:;;:;K,,~
(20,20,30) (30, 10,230)Sistem Kendali Jaringan Syaraf
"--- -~ --"
(30,40, -10)
,:):!1x.\~f;I
J lI,) :~f"
~.~~ J(20,20,30) (30, 10,230) (30,40, -10)
Gambar 10. Lintasan dan robot mobil untuk tiga buah posisi awal (x, y, <1».
Gambar 10 memperlihatkan beberapa lintasan daTi robot mobil untuk tiga buahposisi awal (x, y, <1» yaitu: (20, 20, 30), (30, 10, 230) clan (30, 40, -10) denganmenggunakan sistem kendali fuzzy clan sistem kendali jaringan syaraf. Sistem kendalifuzzy tidak menggunakan seluruh aturan-aturan F AM untuk setiap iterasinya.Umumnya sistem hanya menggunakan satu atau dua aturan F AM untuk setiapiterasinya. Sistem sebagian besar menggunakan 4 aturan F AM dalam satu kejadian.
167
-:,:""'~
~~
Risalah Lokakarya Komputasi dalam gains dan Teknologi Nuklir XIV, Juli 2003
Jika kita membandingkan lintasan robot mobil dengan sistem fuzzy clan sistemjaringan, sistem pengendali fuzzy selalu memberikan lintasan robot yang halussedangkan pada sistem pengendali jaringan syaraf memberikan lintasan yang tidakoptimal clan kadang-kadang diikuti denganjejak langkah yang tidak beraturan.
KESIMPULAN
Pengendali fuzzy selalu menggerakkan robot mobil dengan halus, sedangkanpengendali neural tidak. Gerak dengan kendali neural kadang-kadang memberikanjejak langkah yang tidak teratur. Melatih sistem kendali neural membutuhkan cukupbanyak waktu, karena algoritrna backpropagation memerlukan ribuan langkah untukpelatihan pada jaringan pengendali. Kadang-kadang, algoritma pembelajaran tidakmencapai konvergensi.
Pengendali fuzzy tidak membutuhkan emulator robot clan tidak memerlukanmodel matematika yang menghubungkan keluaran sebagai fungsi masukan.Pengendali fuzzy lebih sedikit membutuhkan operasi komputasi dibandingkan denganpengendali neural. Sebagian besar operasi komputasi pada pengendali neuralmelibatkan operasi perkalian, penambahan atau fungsi logaritmik daTi dua bilangannyata. Sedangkan pada pengendali fuzzy, sebagian besar operasi komputasi adalahoperasi pembandingan clan penambahan dua bilangan nyata.
DAFTARPUSTAKA
3,
4
5
6.
FU, K.S., GONZALEZ, R.C., LEE, C.S.G., Robotics: Control, Sensing, Vision,and Intelligence, McGraw-Hill Book Co., Singapore, 1987
ZADEH, L.A., Fuzzy Logic, Computer, 21 (1988)
NGUYEN, D., WillROW, B., "The Truck Backer-Upper: An Example of Self-Learning in Neural Networks", Proceedings of International Joint Conference onNeural NetworkS' (UCNN-89), Vol. II, (1989) 357-363
KOSKO, B., Neural NetworkS' and Fuzzy Systems: A Dynamical SystemsApproach to Machine Intelligence, Prentice Hall Inc., Engelwood Cliffs. NewJersey, 1992
POMERLEAU, D.A., Neural Network Perception for Mobile Robot Guidance,Kluwer Academic Publishers, Boston, 1993
PIN, F.G., WATANABE, Y., "Navigation of Mobile Robots Using a FuzzyBehaviorist Approach and Custom-Designed Fuzzy Inferencing Boards",Robotica, 12 (6) (1994) 491-504
168
Pengernbangan Robot Mobil Otonom Menggunakan Sistern Kendali Fuzzy dan Jaringan (M. Syarnsa Ardisasmita)
7
8
TUNSTEL, E., "Co-ordination of Distributed Fuzzy Behaviors in Mobile RobotControl", IEEE Int. Con! on Systems, Man and Cybernetics, (1995) 4009-4014
SAFFIOTTI, A., "Fuzzy Logic in Autonomous Robotics: behavior coordination",Sixth IEEE IntI. Conference on Fuzzy Systems (FuzzIEEE'97), Barcelona,(1997) 573-578
DISKUSI
SUDARNO
Apakah sistem kontrol fuzzy clan JST bekerja secara independent atau diintegrasikanmenjadi neurofuzzy?
M. SY AMSA ARDISASMIT A
Kami di sini bermaksud membandingkan keandalan daTi sistem kendali fuzzy dansistem kendali jaringan syaraf pada navigasi robot mobil yang otonom, artinyamasing-masing sistem bekerja secara independent. Tetapi karena sistem jaringansyaraf membutuhkan data-data untuk pelatihan maka kami gunakan data-data lintasanideal yang dihasilkan oleh suatu pengendali fuzzy untuk pelatihan.
EDYSAPTONO
Dalam perjalanan dari Start menuju sasaran, di tengah jalan ada perintang/wall,bagaimana kontrol robot tersebut agar sampai sasaran?Bagaimana internal input dari robot tersebut?2
M. SY AMSA ARDISASMIT A
2.
Kita dapat menggunakan peta lingkungan yang diintegrasikan pada programpengendalian sehingga robot dapat melakukan koreksi arab clan lintasanpenjejakan. Bisa juga robot dilengkapi dengan sistem penginderaan jarakinframerah untuk menentukan posisi clan arab lintasan penjejakan.Sebagai masukan bagi robot mobil menggunakan sistem kendali fuzzy clanjaringan syaraf adalah titik awal, titik akhir (terminal) clan sudut arab badan robot.
169
Risalah wkakarya Komputasi dalam Sains clan Teknologi Nuklir XN, Juli 2003
ADE JAMAL
Berapa besar ukuran robot yang bisa dibuat dengan metoda Fuzzy, Neural atau pm?Sebagai masukan, jika ukuran ini bisa menjadi kecil karena pilihan metodenya makabisa digunakan untuk pengecekan pipa bocor.
M. SY AMSA ARDISASMU A
Metoda Logika Fuzzy, Neural Network dan pm dapat digunakan untuk berbagaiukuran robot karena metoda-metoda tersebut merupakan program komputer yangditanamkan pada sistem pengolah robot untuk mengatur gerakan motor sesuai denganalgoritma yang dibuat sebelumnya.
B AKRI ARB IE
Tampaknya Fuzzy Control cukup menarik. Apakah acta usaha untuk pengendalianPLTN. Kalau acta statusnya sudah sampai di mana?
M. SY AMSA ARDISASMIT A
Sudah banyak penelitian yang dilakukan untuk rnenerapkan sistern pakar urnumnyaatau logika fuzzy khususnya dalarn pengendalian PLTN. Ternan-ternan di ReaktorKartini Yogtakarta sudah rnencoba rnenerapkan pengaturan batang kendali reaktor
dengan logika fuzzy.
UTAJA
2Bagaimana hila perubahan kondisi terlalu besar?Bagaimana hila masuk dalam kondisi vibrasi (arah selalu bolak-balik)?
M. SYAMSAARDISASMITA
2
Kondisi pada sistem kendali fuzzy dan jaringan syaraf adalah posisi dan sudutarah. Kondisi perubahan posisi maupun sudut yang besar tidak ada masalahselama masih dalam daerah variabel perhitungan.
Dalam sistem kendali, vibrasi merupakan suatu gangguan akibat daTi ketidakstabilan disebabkan damping ratio pada response transien suatu penggerak. Dalamkasus kita, hal ini tidak akan terjadi karena posisi akhir dan arahnya adalah tetap.
70
Moh. zen
Home
Related Documents










