1 ABS fren sistemine yönelik çoklu model geçişli kontrolcüler tasarlanması ve test edilmesi Morteza Dousti, S.Çağlar Başlamışlı Makina Mühendisliği Bölümü Hacettepe Üniversitesi, 06800 Beytepe, Ankara [email protected] [email protected] Özetçe Çalışmamızda ABS fren sistemine yönelik çoklu model geçişli kontrolcüler tasarlanmış ve bu kontrolcülerin etkinliği Inteco firması tarafından temin edilen deney düzeneği üzerinde test edilmiştir. Deney sisteminin doğrusal olmayan yapısından dolayı doğrusallaştırma işlemi yapılmış ve farklı hızlarda etkinleştirilen çoklu model geçişli kontrolcüler tasarlanmıştır. Deney sisteminin yapısından dolayı tek bir sürtünme katsayısında ( ) deneyler gerçekleştirilebilmektedir. Bu yüzden fren kuvvetini ( ), deney cihazında uygulanan tekerlek dik kuvvetini ( ) değiştirerek, farklı yol şartlarınının yansıtılmasını sağlayan deneyler de ayrıca gerçekleştirilmiştir. Elde edilen sonuçlar tasarlanan kontrolcü yapısının elektromekanik fren sistemine sahip araçlarda uygulanmasının mümkün olduğunu göstermektedir. 1. Giriş ABS fren sisteminin işlevi panik frenleme esnasında tekerlek kilitlenmesi önlemek ve böylelikle araç direksiyon hâkimiyetini muhafaza etmektir. Günümüzde ABS fren sistemi Hidrolik veya Elektromekanik fren teknolojiler ile uygulanmaktadır. Elektromekanik fren sisteminin bant genişliği hidrolik sisteme göre çok daha yüksek olduğundan hidrolik sistemde uygulunan fren hidrolik basıncını arttır-azalt stratejisi yerine sürekli değişken bir basınç kontrolü yapmak mümkündür[1,2]. Elimizdeki Inteco deney düzeneğinde bu işlem DC motor ile kontrol edilebilmektedir. Inteco deney cihazı ayrıca bir çok araştırmacı tarafından deneysel fren testlerinin gerçekleştirilmesi için seçilmiştir. Mitic ve çalışma arkadaşları [3] ABS kontrolü için dijital kayma-kipli kontrolcü algoritmasını uygulamışlardır. Kayacan ve çalışma arkadaşları ise [4] aracın hızına göre tekerlek kayma takibi için gri kayma-kipli kontrolcü (grey sliding-mode controller) tipini tasarlamışlardır. Bu çalışmada ABS fren sistemine yönelik çoklu model geçişli kontrolcüler tasarlanmış ve bu kontrolcülerin bahsi geçen deney düzeneği üzerinde test edilmiştir. 2. Deney Düzeneğinin Özellikleri Inteco ABS test platformunun özellikleri aşağıda sıralanmıştır: Cihaz taşıt eylemsizlik özelliklerinin benzetiminde kullanılan bir volan ve bu volan üzerinde frenleme işleminde kullanılan bir tekerlek; volanı belli bir hıza kadar hızlandıran elektrikli bir motor ve tekerleğin frenlenmesi sağlayan elektromekanik fren sistemi, volan ve tekerleğin hızlarının ölçülmesini sağlayan enkoderlerden oluşmaktadır. Sistemdeki eyleyiciler ve algılayıcılar Matlab ortamıyla etkileşim halindedir. Matlab Simulink ortamındaki Real Time Workshop ile eyleyiciler kontrol edilebilmekte ve veri transfer işlemleri gerçekleştirilmektedir. Bu özelliği sayesinde Inteco test platformu farklı ABS kontrol algoritmalarının test edilmesine olanak sağlamaktadır. Şekil 1’de gösterilen deney düzeneğinde iki adet tekerlek bulunmaktadır. Alt taraftaki tekerlek göreceli olarak taşıt eylemsizliğini ve üst taraftaki tekerlek frenlenen taşıt tekerleğini temsil etmektedir. Tekerleklere dik kuvvet sonucu oluşan temas sürtünme kuvveti sebebiyle birbirleri arasında tork transferi yapılarak kontrollü hızlandırma/frenleme yapılması mümkün olmaktadır. Denge koluna takılı olan tekerlek teflon malzeme ile kaplanmıştır. Aşağıdaki tekerlek ise pürüzsüz metal bir yüzeye sahiptir. Tekerleklerin açısal hızları enkoderlerden gelen veriler doğrultusunda ölçülmektedir. Üst tekerlek disk fren sistem ile donatılmıştır ve fren koluna hidrolik kavrama ile bağlıdır. Fren sistemi bir DC motor kullanılarak frenleme esnasında telli bir bağlantı ile sıkıştırılmaktadır. Alt taraftaki tekerlek ise büyük bir DC motora bağlıdır ve tekerleğin hızlanmasını sağlamaktadır. Bu motor tekerleğin hızlanmasını sağlamaktadır ve frenleme esnasında devre dışı bırakılmaktadır. Her iki DC motor da PWM (Pulse Width Modulation) sinyalleriyle kontrol edilmektedir. Şekil 1: Inteco ABS deney cihazı. 2. Deney Düzeneğinin Matematiksel modeli Araç Tekerleği Araç Zemin benzetim tekerleği Enkoder Fren Sürücü Motor Frenleme Motor Sönümleyici 416

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
ABS fren sistemine yönelik çoklu model geçişli kontrolcüler tasarlanması ve test
edilmesi
Morteza Dousti, S.Çağlar Başlamışlı
Makina Mühendisliği Bölümü
Hacettepe Üniversitesi, 06800 Beytepe, Ankara [email protected]
Özetçe
Çalışmamızda ABS fren sistemine yönelik çoklu model geçişli
kontrolcüler tasarlanmış ve bu kontrolcülerin etkinliği Inteco
firması tarafından temin edilen deney düzeneği üzerinde test
edilmiştir. Deney sisteminin doğrusal olmayan yapısından
dolayı doğrusallaştırma işlemi yapılmış ve farklı hızlarda
etkinleştirilen çoklu model geçişli kontrolcüler tasarlanmıştır.
Deney sisteminin yapısından dolayı tek bir sürtünme
katsayısında ( ) deneyler gerçekleştirilebilmektedir. Bu
yüzden fren kuvvetini ( ), deney cihazında
uygulanan tekerlek dik kuvvetini ( ) değiştirerek, farklı yol
şartlarınının yansıtılmasını sağlayan deneyler de ayrıca
gerçekleştirilmiştir. Elde edilen sonuçlar tasarlanan kontrolcü
yapısının elektromekanik fren sistemine sahip araçlarda
uygulanmasının mümkün olduğunu göstermektedir.
1. Giriş
ABS fren sisteminin işlevi panik frenleme esnasında tekerlek
kilitlenmesi önlemek ve böylelikle araç direksiyon
hâkimiyetini muhafaza etmektir. Günümüzde ABS fren
sistemi Hidrolik veya Elektromekanik fren teknolojiler ile
uygulanmaktadır. Elektromekanik fren sisteminin bant
genişliği hidrolik sisteme göre çok daha yüksek olduğundan
hidrolik sistemde uygulunan fren hidrolik basıncını arttır-azalt
stratejisi yerine sürekli değişken bir basınç kontrolü yapmak
mümkündür[1,2]. Elimizdeki Inteco deney düzeneğinde bu
işlem DC motor ile kontrol edilebilmektedir. Inteco deney
cihazı ayrıca bir çok araştırmacı tarafından deneysel fren
testlerinin gerçekleştirilmesi için seçilmiştir. Mitic ve çalışma
arkadaşları [3] ABS kontrolü için dijital kayma-kipli kontrolcü
algoritmasını uygulamışlardır. Kayacan ve çalışma arkadaşları
ise [4] aracın hızına göre tekerlek kayma takibi için gri
kayma-kipli kontrolcü (grey sliding-mode controller) tipini
tasarlamışlardır.
Bu çalışmada ABS fren sistemine yönelik çoklu model geçişli
kontrolcüler tasarlanmış ve bu kontrolcülerin bahsi geçen
deney düzeneği üzerinde test edilmiştir.
2. Deney Düzeneğinin Özellikleri
Inteco ABS test platformunun özellikleri aşağıda sıralanmıştır:
Cihaz taşıt eylemsizlik özelliklerinin benzetiminde
kullanılan bir volan ve bu volan üzerinde frenleme
işleminde kullanılan bir tekerlek; volanı belli bir hıza
kadar hızlandıran elektrikli bir motor ve tekerleğin
frenlenmesi sağlayan elektromekanik fren sistemi, volan
ve tekerleğin hızlarının ölçülmesini sağlayan
enkoderlerden oluşmaktadır.
Sistemdeki eyleyiciler ve algılayıcılar Matlab ortamıyla
etkileşim halindedir. Matlab Simulink ortamındaki Real
Time Workshop ile eyleyiciler kontrol edilebilmekte ve
veri transfer işlemleri gerçekleştirilmektedir. Bu özelliği
sayesinde Inteco test platformu farklı ABS kontrol algoritmalarının test edilmesine olanak sağlamaktadır.
Şekil 1’de gösterilen deney düzeneğinde iki adet tekerlek
bulunmaktadır. Alt taraftaki tekerlek göreceli olarak taşıt
eylemsizliğini ve üst taraftaki tekerlek frenlenen taşıt
tekerleğini temsil etmektedir. Tekerleklere dik kuvvet sonucu
oluşan temas sürtünme kuvveti sebebiyle birbirleri arasında
tork transferi yapılarak kontrollü hızlandırma/frenleme
yapılması mümkün olmaktadır. Denge koluna takılı olan
tekerlek teflon malzeme ile kaplanmıştır. Aşağıdaki tekerlek ise pürüzsüz metal bir yüzeye sahiptir.
Tekerleklerin açısal hızları enkoderlerden gelen veriler
doğrultusunda ölçülmektedir. Üst tekerlek disk fren sistem ile
donatılmıştır ve fren koluna hidrolik kavrama ile bağlıdır. Fren
sistemi bir DC motor kullanılarak frenleme esnasında telli bir
bağlantı ile sıkıştırılmaktadır. Alt taraftaki tekerlek ise büyük
bir DC motora bağlıdır ve tekerleğin hızlanmasını
sağlamaktadır. Bu motor tekerleğin hızlanmasını
sağlamaktadır ve frenleme esnasında devre dışı
bırakılmaktadır. Her iki DC motor da PWM (Pulse Width Modulation) sinyalleriyle kontrol edilmektedir.
Şekil 1: Inteco ABS deney cihazı.
2. Deney Düzeneğinin Matematiksel modeli
Araç Tekerleği
Araç Zemin
benzetim tekerleği
Enkoder
Fren
Sürücü Motor
Frenleme Motor
Sönümleyici
416
Mavi
Typewritten Text
TOK 2014 Bildiri Kitabı 11-13 Eylül 2014, Kocaeli
Mavi
Rectangle

2
Test düzeneğinin serbest cisim diyagramı Şekil 2’de verilmiştir:
Şekil 2: ABS deney cihazının serbest cisim diyagramı.
Üst tekerleğe uygulanan üç adet tork bulunmaktadır: fren
torku , Üst yatağın viskoz sürtünme torku ve
tekerlekler arasında sürtünme torku . Alt tekerleğe iki adet
tork uygulanmaktadır: alt yatağın sürtünme torku ve
tekerlekler arasında sürtünme torku . Bunların dışında alt
tekerleğe uygulanan iki adet kuvvet var: üst tekerleğin
yerçekimi kuvveti ve tekerlekler arası dik kuvvet. Sürtünme
kuvvetinin normal kuvvet ile doğru orantılı olduğu
varsayılmaktadır. Burada, üst tekerleğin açısal hızı ve
tekerleğin yarıçapı, alt tekerleğin açısal hızı ve
tekerleğin yarıçapıdır. Üst tekerleğin hareket denklemi aşağıda
verilmiştir:
( ) (1)
Alt tekerleğin hareket denklemi ise aşağıda verilmiştir:
( ) (2)
Burada ve sırasıyla üst ve alt tekerleklerin
eylemsizlik momentleri, ve , üst ve alt tekerleklerin
yataklarındaki viskoz sürtünme katsayısılarıdır.Normal
kuvveti( ) hesaplamak için A noktasına göre tüm torkların
toplamı aşağıdaki gibi yazılabilmektedir
( ( ) )
(3)
Burada denge koluna uygulanan yerçekimine bağlı
moment, tekerleklerin temas noktası ve denge kolunun
dönme ekseni arasındaki mesafe, dik doğrultu ve L
arasındaki temas noktasındaki açısıdır. Denklem
sadeleştirdirildikten sonra aşağıdaki ifade elde edilmektedir:
( ( ) ) (4)
için elde edilen ifade sistem denklemlerine
yerleştirildikten sonra, hareket denklemleri aşağıdaki gibi ifade edilebilmektedir:
( ( ) ) ( )
( ( ) ) ( )
(5)
Her iki denklemde ortak faktör olarak:
( ) ( )
( ( ) ) (6)
tanımlanabilmtektedir. Dinamik sürtünme katsayısı ( ) ’yı
için cihaz kullanım kılavuzunda yer alan aşağıdaki ifade
kullanılabilmektedir:
( )
(7)
Üstte verilmiş olan sistem denklemlerini sadeleştirmek için aşağıdaki katsayılar tanımlanmıştır.
Tablo 1: Sistem sadeleştirme katsayıları
( ) ( ) ( )
( )
( )
Sonuç olarak, sistem denklemleri aşağıdaki gibi elde edilmektedir
( )( ) ( ( ) )
( )( )
( )
(8)
Fren eyleyici dinamiği ise aşağıdaki denklem ile ifade edilebilmektedir:
( ( ) ) (9)
Burada fren kontrolü değişkenidir. ( )fonksiyonu ise
aşağıdaki denklem ile elde edilmektedir
( ) {
(10)
Yukarıda verilen katsayıların ve bazı parametrelerin değerleri Tablo 2’de verilmiştir [7].
417
Mavi
Rectangle

3
Tablo 2: Sistem katsayıları ve parametreleri
3. Sistemin doğrusallaştırması
ABS kontrol probleminde referans değer takibinde kullanılan
tekerlek boylamasına kayma oranı aşağıdaki gibi hesaplanmaktadır:
(11)
Bu denklemin türevi alındığında
( )
( )
( )
(12)
elde edilmektedir. Sistem denklemleri uygulanınca
[
( ( )( )
( ) )
( ( )( )
( ( ) ) )]
(13)
ifadesi elde edilmektedir. Denklemi sadeleştirmek için aşağıdaki tanım yapılmıştır
( ) (14)
Sonuç olarak boylamasına kayma dinamiği aşağıdaki gibi ifade edilebilmektedir:
( ) ( ) (15)
( ) [( ( ) )( )
( ( ) )]
[( ( )
( ) )
( ) ]
(16)
( )
( ( ) ( )( ))
(17)
Doğrusallaştırma işlemi sonucunda ve alt tekerleğin açısal
hızının ( ) üst tekerleğin açısal hızına göre daha yavaş
dinamikleri olduğu göz önünde bulundurarak, sistem matrisleri aşağıdaki elde edilebilmektedir:
[ ]
[
]
[ ]
[
]
[ ] [ ]
(18)
Doğrusallaştırma işlemi farklı tekerlek hızlarında yapılarak
doğrusal olmayan sistem için k adet doğrusal sistem elde
etmek mümkündür. Bu sistemlerin geçişli kararlılığı için bir
sonraki kısımda çoklu geçişli kontrolcü yapısı tasarımı tairf
edilmiştir.
4. Kontrolcü Tasarımı
4.1. PID Kontrolcü Tasarımı
Bu kısımda referans kayma değerinin takibini sağlayacak PID
kontrolcüsü doğrusallaşmış sistem için Matlab/Simulink
ortamındaki pidtune komutunu kullanılarak tasarlanmıştır.
PID kontrolcüsü çoklu model geçişli kontrolcünün etkinliğinin değerlendirilmesinde kullanılacaktır.
4.2. Çoklu Model Geçişli kontrolcü tasarımı
Bu kısımda çoklu model geçişli kontrolcü tasarımının
temelleri sunulmuştur:
4.2.1. Temel Tasarım:
Tasarım hedeflerine ulaşabilmek için; sonlu modlar kümesinin
elemanı olan, her sistem modu için farklı bir kontolcü
bağdaştırılmıştır. Şekil-3’te gösterildiği gibi her bir moda
karşılık gelen ve kontrolcüleri doğrusal ve zamandan bağımsız
bir sistem olarak tasarlanan belirli bir kontrolcü yapısı
seçilmiştir. Her bir kontrolcünün dinamiği aşağıdaki gibi
tanımlanabilmektedir:
( ) ( ) ( )
( ) ( ) ( ) (19)
( ) , modu ile bağdaştırılan kontrolcünün
durum vektörüdür. Bir boyutlu giriş sinyali ( ) bütün
kontrolcülerce paylaşılmaktadır ve her kontrolcü farklı bir
kontrol sinyalini ( ( ) ) üretmektedir. Kontrolcüleri
tasarlamak için yukarıda belirtilen ve sistem matrisi
418
Mavi
Rectangle
4
, giriş ve ölçüm matrisleri sırasıyla ve
doğrudan iletim terimi olan standart kontrol formu
tercih edilmiştir. İlgili transfer fonksiyonları aşağıdaki gibi verilmiştir:
( ) ( )
(20)
4.2.2. Yumuşak Geçici Rejim Geçişi
Her bir alt kapalı çevrim kontrol sistemini kararlı hale
getirecek özdeğerlerin, { } ortak
kümesinde yer almasını sağlayan kontrolcüler, kutup
yerleştirme yöntemi ile sentezlenmektedir. Böylece tüm alt
kapalı çevrim kontrol sistemleri ortak özdeğerlere
( kümesinde yer alan) sahip olacaklardır.
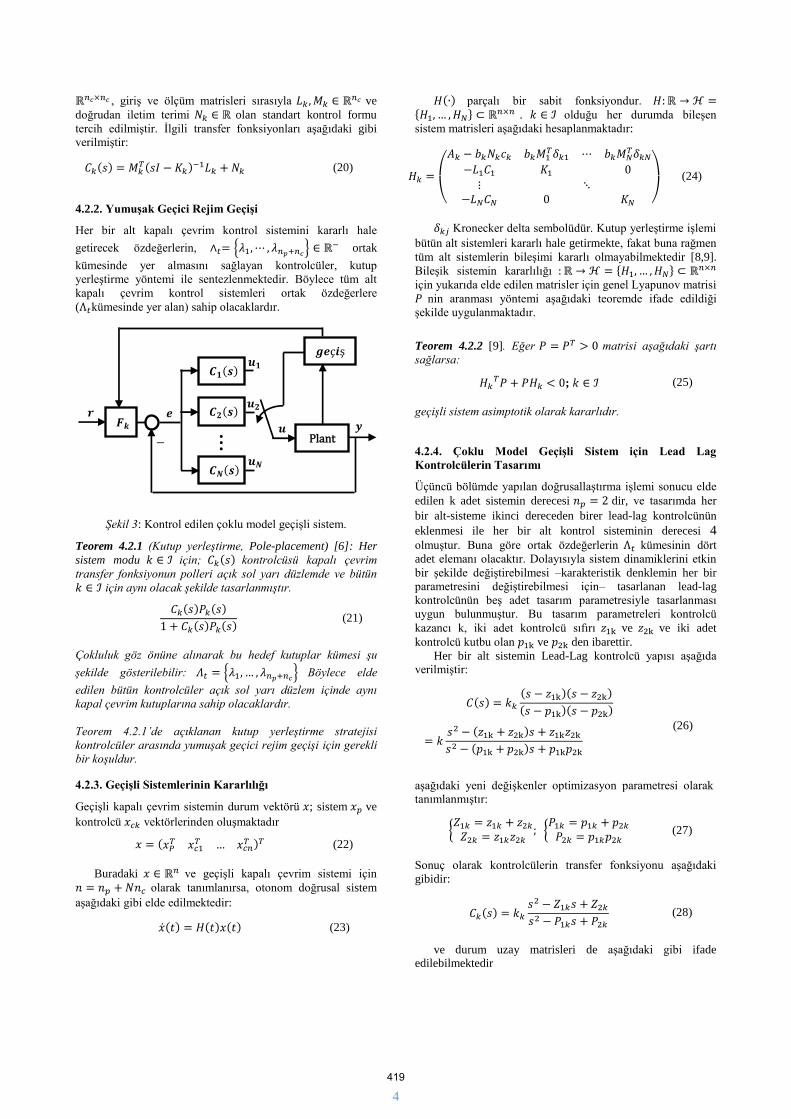
Şekil 3: Kontrol edilen çoklu model geçişli sistem.
Teorem 4.2.1 (Kutup yerleştirme, Pole-placement) [6]: Her
sistem modu için; ( ) kontrolcüsü kapalı çevrim
transfer fonksiyonun polleri açık sol yarı düzlemde ve bütün
için aynı olacak şekilde tasarlanmıştır.
( ) ( )
( ) ( ) (21)
Çokluluk göz önüne alınarak bu hedef kutuplar kümesi şu
şekilde gösterilebilir: { } Böylece elde
edilen bütün kontrolcüler açık sol yarı düzlem içinde aynı
kapal çevrim kutuplarına sahip olacaklardır.
Teorem 4.2.1’de açıklanan kutup yerleştirme stratejisi
kontrolcüler arasında yumuşak geçici rejim geçişi için gerekli
bir koşuldur.
4.2.3. Geçişli Sistemlerinin Kararlılığı
Geçişli kapalı çevrim sistemin durum vektörü ; sistem ve
kontrolcü vektörlerinden oluşmaktadır
(
) (22)
Buradaki ve geçişli kapalı çevrim sistemi için
olarak tanımlanırsa, otonom doğrusal sistem
aşağıdaki gibi elde edilmektedir:
( ) ( ) ( ) (23)
( ) parçalı bir sabit fonksiyondur. { }
. olduğu her durumda bileşen
sistem matrisleri aşağıdaki hesaplanmaktadır:
(
)
(24)
Kronecker delta sembolüdür. Kutup yerleştirme işlemi
bütün alt sistemleri kararlı hale getirmekte, fakat buna rağmen
tüm alt sistemlerin bileşimi kararlı olmayabilmektedir [8,9].
Bileşik sistemin kararlılığı { }
için yukarıda elde edilen matrisler için genel Lyapunov matrisi
nin aranması yöntemi aşağıdaki teoremde ifade edildiği
şekilde uygulanmaktadır.
Teorem 4.2.2 [9]. Eğer matrisi aşağıdaki şartı
sağlarsa:
; (25)
geçişli sistem asimptotik olarak kararlıdır.
4.2.4. Çoklu Model Geçişli Sistem için Lead Lag
Kontrolcülerin Tasarımı
Üçüncü bölümde yapılan doğrusallaştırma işlemi sonucu elde
edilen k adet sistemin derecesi dir, ve tasarımda her
bir alt-sisteme ikinci dereceden birer lead-lag kontrolcünün
eklenmesi ile her bir alt kontrol sisteminin derecesi 4
olmuştur. Buna göre ortak özdeğerlerin kümesinin dört
adet elemanı olacaktır. Dolayısıyla sistem dinamiklerini etkin
bir şekilde değiştirebilmesi –karakteristik denklemin her bir
parametresini değiştirebilmesi için– tasarlanan lead-lag
kontrolcünün beş adet tasarım parametresiyle tasarlanması
uygun bulunmuştur. Bu tasarım parametreleri kontrolcü
kazancı k, iki adet kontrolcü sıfırı ve ve iki adet
kontrolcü kutbu olan ve den ibarettir.
Her bir alt sistemin Lead-Lag kontrolcü yapısı aşağıda verilmiştir:
( ) ( )( )
( )( )
( ) ( )
(26)
aşağıdaki yeni değişkenler optimizasyon parametresi olarak tanımlanmıştır:
{
{
(27)
Sonuç olarak kontrolcülerin transfer fonksiyonu aşağıdaki
gibidir:
( )
(28)
ve durum uzay matrisleri de aşağıdaki gibi ifade edilebilmektedir
𝑭𝒌
𝑪𝟏(𝒔)
𝑪𝟐(𝒔)
𝑪𝑵(𝒔)
𝒈𝒆ç𝒊ş
Plant
𝒓 𝒆
𝒖𝟏
𝒖𝟐
𝒖𝑵
𝒖 𝒚
419
Mavi
Rectangle

5
{ ( ) ( ) ( )
( ) ( ) ( ) (29)
(
) ( )
( )
(30)
Kontrolcü parametreleri Matlab yazılımında ‘fmincon.m’
fonksiyonu kullanılarak optimize edilmiştir. Tasarım detayları aşağıda verilmiştir.
Kontrolcü parametreleri olan ve
Lyapunov matrisi nin bağımsız elemanları
optimizasyonparametreleri olarak seçilmiştir Her bir alt kapalı
çevrim sistemi kararlı kılmak ve geçişleri akıcı yapabilmek
adına optimizasyon süreci esnasında her bir alt sistemin kapalı
çevrim kutuplarına doğal frekans ve sönümleme değerleri için
kısıtlamalar eklenmiştir.
Optimizasyonda kullanılan maliyet fonksiyonu, sistem karakteristik denklemi üzerine kurulmuştur:
(31)
Üstteki denklemde katsayıları kontrolcü
parametrelerinin ( ) fonksiyonudur.
Optimizasyon süreci esnasında her bir alt kapalı çevrim
sistemin karakteristik denklemi aşağıdaki ortak karakteristik denkleme yakınsaması sağlanmaktadır:
∏ ( )
(32)
Burada her bir ortak özdeğerler kümesinin elemanıdır. Sonuç olarak optimizasyon problemi aşağıdaki
gibi kurulmuştur:
Min. ( ) ∑ ( )
{ } ( )
( )
(33)
Üstteki ifadelerde rastgele seçilmiş ağırlık
fonksiyonları, ( ) her bir sistemin karakteristik
denklem parametreleri, ( ) her bir kutba ait doğal frekans
değeri, ve ( )her bir kutba ait sönümlenme değeri, ayrıca
ve bu parametreler için seçilen alt sınırlardır. Üstte
bahsi geçen maliyet fonksiyonu tüm altsistemleri kararlı
kılmakta, ortak özdeğerler kümesinin elde edilmesini
sağlamakta, ayrıca genel Lyapunov fonksiyonunu geçiş
karalığını sağlamak için tespit edilmesini sağlamaktadır.
Tablo 3’de verilen üç ayrı işletim bölgesinde (alt tekerleğin
açısal hızına göre ) üç ayrı kontrolcüden
oluşan bir dizi kontrolcü tasarlanmıştır. Kontrolcüler
arasındaki geçişler test düzeneğinin alt tekerlek hızına göre
yapılmaktadır.
Tablo 3: Çoklu geçişli modelde tasarlanan kontrolcüler ve
çalışma aralıkları
Açısal Hız ( ) Kontrolcü
( )
( )
( )
Tasarlanan kontrolcülerin durum-uzay matrisleri aşağıda verilmiştir:
(
) ( ) ( )
(
) ( ) ( )
(
) ( ) ( )
5. Deneysel Sonuçlar
Çoklu model geçişli (MMS) kontrolcünün etkinliğini
göstermek için, bir dizi benzetim ve gerçek zamanlı deneyler
yapılmıştır. Cihazın koluna eklenen bir düzenek vasıtasıyla
tekerlekler arası dik kuvveti arttırılmış ve azaltılmış,
kontrolcünün dayanaklılığını test etmek için değişken sürtünme kuvveti testleri yapılmıştır (Şekil 4).
Şekil 4: Değişken dik kuvvet uygulamak için hazırlanan düzenek.
2
Lit/s
3.5
Lit.
Wa
T
𝐹𝑧
Upper
Wheel
Lower
Wheel
T
T
𝐹𝑧
Upper
Wheel
Lower
Wheel
T
m.g
2
Lit/s
3,5
Lit.
Water
420
Mavi
Rectangle
6
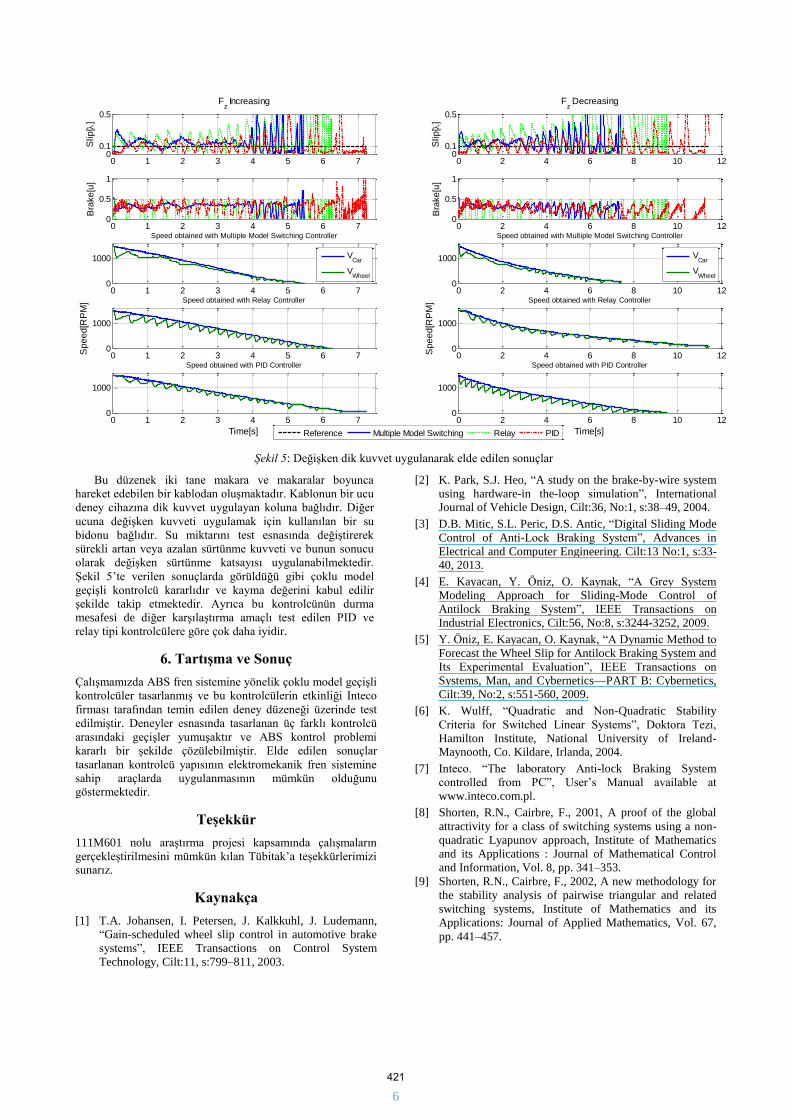
Şekil 5: Değişken dik kuvvet uygulanarak elde edilen sonuçlar
Bu düzenek iki tane makara ve makaralar boyunca
hareket edebilen bir kablodan oluşmaktadır. Kablonun bir ucu
deney cihazına dik kuvvet uygulayan koluna bağlıdır. Diğer
ucuna değişken kuvveti uygulamak için kullanılan bir su
bidonu bağlıdır. Su miktarını test esnasında değiştirerek
sürekli artan veya azalan sürtünme kuvveti ve bunun sonucu
olarak değişken sürtünme katsayısı uygulanabilmektedir.
Şekil 5’te verilen sonuçlarda görüldüğü gibi çoklu model
geçişli kontrolcü kararlıdır ve kayma değerini kabul edilir
şekilde takip etmektedir. Ayrıca bu kontrolcünün durma
mesafesi de diğer karşılaştırma amaçlı test edilen PID ve
relay tipi kontrolcülere göre çok daha iyidir.
6. Tartışma ve Sonuç
Çalışmamızda ABS fren sistemine yönelik çoklu model geçişli
kontrolcüler tasarlanmış ve bu kontrolcülerin etkinliği Inteco
firması tarafından temin edilen deney düzeneği üzerinde test
edilmiştir. Deneyler esnasında tasarlanan üç farklı kontrolcü
arasındaki geçişler yumuşaktır ve ABS kontrol problemi
kararlı bir şekilde çözülebilmiştir. Elde edilen sonuçlar
tasarlanan kontrolcü yapısının elektromekanik fren sistemine
sahip araçlarda uygulanmasının mümkün olduğunu göstermektedir.
Teşekkür
111M601 nolu araştırma projesi kapsamında çalışmaların
gerçekleştirilmesini mümkün kılan Tübitak’a teşekkürlerimizi sunarız.
Kaynakça
[1] T.A. Johansen, I. Petersen, J. Kalkkuhl, J. Ludemann,
“Gain-scheduled wheel slip control in automotive brake
systems”, IEEE Transactions on Control System
Technology, Cilt:11, s:799–811, 2003.
[2] K. Park, S.J. Heo, “A study on the brake-by-wire system
using hardware-in the-loop simulation”, International Journal of Vehicle Design, Cilt:36, No:1, s:38–49, 2004.
[3] D.B. Mitic, S.L. Peric, D.S. Antic, “Digital Sliding Mode
Control of Anti-Lock Braking System”, Advances in
Electrical and Computer Engineering. Cilt:13 No:1, s:33-40, 2013.
[4] E. Kayacan, Y. Öniz, O. Kaynak, “A Grey System
Modeling Approach for Sliding-Mode Control of
Antilock Braking System”, IEEE Transactions on
Industrial Electronics, Cilt:56, No:8, s:3244-3252, 2009.
[5] Y. Öniz, E. Kayacan, O. Kaynak, “A Dynamic Method to
Forecast the Wheel Slip for Antilock Braking System and
Its Experimental Evaluation”, IEEE Transactions on
Systems, Man, and Cybernetics—PART B: Cybernetics,
Cilt:39, No:2, s:551-560, 2009.
[6] K. Wulff, “Quadratic and Non-Quadratic Stability
Criteria for Switched Linear Systems”, Doktora Tezi,
Hamilton Institute, National University of Ireland-Maynooth, Co. Kildare, Irlanda, 2004.
[7] Inteco. “The laboratory Anti-lock Braking System
controlled from PC”, User’s Manual available at
www.inteco.com.pl.
[8] Shorten, R.N., Cairbre, F., 2001, A proof of the global
attractivity for a class of switching systems using a non-
quadratic Lyapunov approach, Institute of Mathematics
and its Applications : Journal of Mathematical Control
and Information, Vol. 8, pp. 341–353.
[9] Shorten, R.N., Cairbre, F., 2002, A new methodology for
the stability analysis of pairwise triangular and related
switching systems, Institute of Mathematics and its
Applications: Journal of Applied Mathematics, Vol. 67,
pp. 441–457.
0 1 2 3 4 5 6 70
0.1
0.5
Fz Increasing
Slip
[ ]
Reference Multiple Model Switching Relay PID
0 2 4 6 8 10 120
0.1
0.5
Fz Decreasing
Slip
[ ]
0 1 2 3 4 5 6 70
0.5
1
Bra
ke
[u]
0 2 4 6 8 10 120
0.5
1
Bra
ke
[u]
0 1 2 3 4 5 6 70
1000
Speed obtained with Multiple Model Switching Controller
VCar
VWheel
0 1 2 3 4 5 6 70
1000
Speed obtained with Relay Controller
Sp
ee
d[R
PM
]
0 1 2 3 4 5 6 70
1000
Speed obtained with PID Controller
Time[s]
0 2 4 6 8 10 120
1000
Speed obtained with Multiple Model Switching Controller
VCar
VWheel
0 2 4 6 8 10 120
1000
Speed obtained with Relay Controller
Sp
ee
d[R
PM
]0 2 4 6 8 10 12
0
1000
Speed obtained with PID Controller
Time[s]
421
Mavi
Rectangle
Related Documents











