A year of ATLAS preparation. Steve Snow New Year 2006 The resolution of tracks reconstructed in ATLAS ID should be: • Good enough for some physics from the first collisions • Rapidly improved by using track-based alignment tools • Inner detector magnetic field map fit. • SCT detector alignment. • NMR probe preparation. • Write/edit endcap module paper • SCT status paper at PSD7. • Organise seminars • SuperNEMO tracker. • CALICE thermal simulation. What I did last year My ATLAS aims

A year of ATLAS preparation. Steve Snow New Year 2006 The resolution of tracks reconstructed in ATLAS ID should be: Good enough for some physics from the.
Dec 25, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A year of ATLAS preparation.Steve Snow New Year 2006
The resolution of tracks reconstructed in ATLAS ID should be:
• Good enough for some physics from the first collisions
• Rapidly improved by using track-based alignment tools
• Eventually good enough that track systematic errors do not dominate the measurement mW to ~15 MeV
• Inner detector magnetic field map fit.
• SCT detector alignment.
• NMR probe preparation.• Write/edit endcap module paper
• SCT status paper at PSD7.
• Organise seminars
• SuperNEMO tracker.• CALICE thermal simulation.
What I did last year
My ATLAS aims

Field map objectives• A useful test of the Standard Model would be measurement of W mass with uncertainty of
25 MeV per lepton type per experiment.• W mass derived from the position of the falling edge of the transverse mass distribution.• Momentum scale will be dominant uncertainty in W mass measurement:
– Need to keep uncertainty in momentum down to ~15 MeV.• Measure isolated muon tracks with pT ~ 40 GeV over large range of η:
– Uncertainty in energy loss negligible.– Concentrate on alignment and B-field.
• Momentum accuracy depends on ∫ r(rmax - r)Bzdr :– Field at intermediate radii, as measured by the sagitta, is most important.
• Typical sagitta will be ~1 mm and target accuracy would be 0.02%, implying a systematic error on sagitta of 0.02 μm:
– Technically impossible!– Will need to use Z mass, which is nearby and very well known.
• In reality, the limit on silicon alignment, even with infinite statistics and ideal algorithms, will be ~1 μm.
• We target an accuracy of 0.05% on sagitta to ensure that B-field measurement is not the limiting factor on momentum accuracy.
This and following slides copied from Paul Miyagawa's talk at the 2nd ATLAS magnetic field workshop

Field shape.
-20000
-15000
-10000
-5000
0
5000
10000
15000
20000
25000
0
0.27
20.
544
0.81
61.
088
1.36
1.63
21.
904
2.17
62.
448
2.72
2.99
23.
264
Z (m)
Fie
ld (
gau
ss)
r=0.2
r=0.4
r=0.6
r=0.8
r=1.0
r=1.2
r=0.2
r=0.4
r=0.6
r=0.8
r=1.0
r= 1.2
r=0.2
r=0.4
r=0.6
r=0.8
r=1.0
r=1.2
Z component
R component
Bending power
The field is very non-uniform at the ends of the coil; the Z component drops off and the R component rises sharply at z=2.65 m. Also plotted is the bending power per unit of radial travel for straight tracks coming from the origin.

Mapper Survey Requirements• At first workshop, survey requirements of
mapper machine relative to Inner Detector were reported as ~1 mm and ~0.2 mrad.
• Reinvestigated these requirements.• 1 mm survey error in x (or y) significant for
high η tracks.• 1 mm survey error in z significant for
endcap tracks.• 0.1 mrad rotation around x (or y) axis
significant for high η tracks.• Conclusions remain unchanged. -8
-6
-4
-2
0
2
4
6
8
-2.5
-2.1
-1.7
-1.3
-0.9
-0.5
-0.1 0.
30.
71.
11.
51.
92.
3
Pseudorapidity
Re
lati
ve
sa
git
ta e
rro
r x
10
^4 phi 1
phi 2
phi 3
phi 4
phi 5
phi 6
phi 7
phi 8
phi 9
phi 10
Effect of 1 mm displacement in X direction
-5
-4
-3
-2
-1
0
1
2
3
4
5
-2.5
-2.1
-1.7
-1.3
-0.9
-0.5
-0.1 0.
30.
71.
11.
51.
92.
3
Pseudorapidity
Re
lati
ve
sa
git
ta e
rro
r x
10
^4 phi 1
phi 2
phi 3
phi 4
phi 5
phi 6
phi 7
phi 8
phi 9
phi 10
Effect of 1 mm displacement in Z direction
-8
-6
-4
-2
0
2
4
6
8
-2.5
-2.1
-1.7
-1.3
-0.9
-0.5
-0.1 0.
30.
71.
11.
51.
92.
3
Pseudorapidity
Re
lati
ve
sa
git
ta e
rro
r x
10
^4 phi 1
phi 2
phi 3
phi 4
phi 5
phi 6
phi 7
phi 8
phi 9
phi 10
Effect of 0.1 mrad rotation around the X axis

Field Mapping Simulation
• Field model sampled on a grid of 90 z-positions × 8 -angles (defined by encoder values of machine).
• 4 calibration points (2 near centre, 2 near one end) visited after every 25 measurements.
• Used current design of machine to determine positions of 48 Hall + 1 NMR probes.
• At each map point, wrote the following data to file:
– Time stamp– Solenoid current– z and encoder values– Field modulus measured by 5 NMR
probes (1 moving + 4 fixed)– 3 field components measured by 48
Hall probes
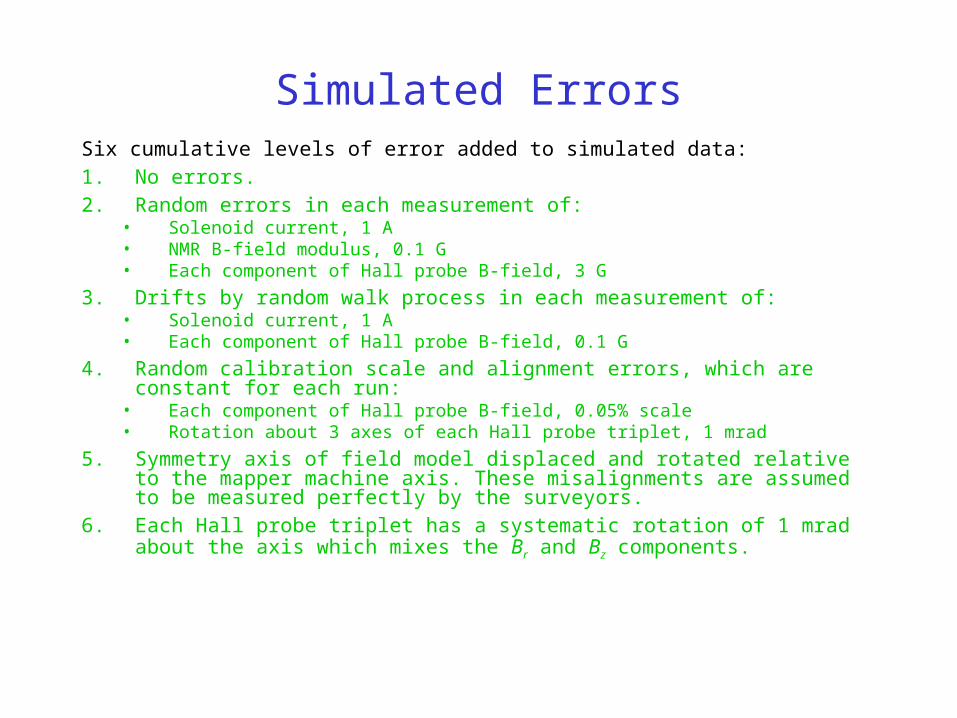
Simulated ErrorsSix cumulative levels of error added to simulated data:
1. No errors.
2. Random errors in each measurement of:• Solenoid current, 1 A• NMR B-field modulus, 0.1 G• Each component of Hall probe B-field, 3 G
3. Drifts by random walk process in each measurement of:• Solenoid current, 1 A• Each component of Hall probe B-field, 0.1 G
4. Random calibration scale and alignment errors, which are constant for each run:• Each component of Hall probe B-field, 0.05% scale• Rotation about 3 axes of each Hall probe triplet, 1 mrad
5. Symmetry axis of field model displaced and rotated relative to the mapper machine axis. These misalignments are assumed to be measured perfectly by the surveyors.
6. Each Hall probe triplet has a systematic rotation of 1 mrad about the axis which mixes the Br and Bz components.

Correction for Current Drift• Average B-field of 4 NMR probes used
to calculate “actual” solenoid current.• Scale all measurements to a reference
current (7600 A).• Effect of drift in current removed• Calibration capable of coping with any
sort of drift.

Correction for Hall Probe Drift
• Mapping machine regularly returns to fixed calibration positions– Near coil centre to calibrate Bz
– Near coil end for Br
– No special calibration point for B
• Each channel is calibrated to a reference time (beginning of run)
• Offsets from calibration points used to determine offsets for measurements between calibrations

Fit Quality with Expected Performance
• Expected mapper performance corresponds to error level 5.
• Both fits accurate within target level of 5×10-4.
0
0.1
0.2
0.3
0.4
0.5
0.6
-2.5
-2.1
-1.7
-1.3
-0.9
-0.5
-0.1 0.
30.
71.
11.
51.
92.
3
Pseudorapidity
Re
lati
ve
sa
git
ta e
rro
r x
10
^4 phi 1
phi 2
phi 3
phi 4
phi 5
phi 6
phi 7
phi 8
phi 9
phi 10
Geometrical fit. Error level 5
-6
-4
-2
0
2
4
6
Pseudorapidity
Re
lati
ve
sa
git
ta e
rro
r x
10
^4 phi 1
phi 2
phi 3
phi 4
phi 5
phi 6
phi 7
phi 8
phi 9
phi 10
Fourier-Bessel fit. Error level 5

Probe normalisation and alignment correctionsHall probe triplets are accurately perpendicular to each other, but their mounting on mapper can have ~1 mrad errors.
Hall probe calibration will probably be good to 0.1% but we can improve it by taking normalisation from the NMR probe at Z=R=0.
We get best results by calculating PNA corrections with a variant of the Fourier-Bessel fit and using the corrected values in the geometrical fit :
-30
-20
-10
0
10
20
30
1 2 3 4 5 6 7 8 9 10
Ten runs with different random errors
Bz
err
or
(Ga
us
s)
Mean
RMS
Max
Min
Mean
RMS
Max
Min
Before probe normalisation and alignment correctionsAfter probe normalisation and alignment corrections
-6
-4
-2
0
2
4
6
1 2 3 4 5 6 7 8 9 10
Ten runs with different random errors
Re
lati
ve s
ag
itta
err
or
* 10
^4
Mean
RMS
Max
Min
Mean
RMS
Max
Min
Before probe normalisation and alignment correctionsAfter probe normalisation and alignment corrections

Field fitting conclusions• With no simulated errors, both fits have excellent technical
accuracy.• With realistic simulated errors, both fits give results within
target of 5×10-4.• Fourier-Bessel fit more sensitive to random measurement
errors:– Due to more free parameters.– F-B fit designed for any solenoid-like field, whereas geometrical
fit is specifically for the ATLAS solenoid.• Probe normalisation & alignment correction from F-B fit
helps significantly.• Require survey of mapper machine relative to Inner
Detector to be accurate to ~1 mm.

Initial SCT AlignmentI have been promoting the idea making an initial SCT alignment based on conventional surveys. This is a backup / alternative to the Oxford plan for an X-ray survey combined with FSI monitoring. The accuracy of the SCT endcap as built, and as surveyed is now becoming clear
Intrinsic resolution of SCT detector; 22 m (just under pitch/12).
Detector positions in module; build 4 m , survey 1 m (Joe's talk).
Location holes in module; build 10 m , survey 3 m.
Module mounting pins on disc; build 100 m , survey 10 m.
Discs in support cylinder; build 200 m , survey 100 m.
Hole to pin clearance; <10 m .
Stability of mounting pins on disc; 20 - 50 m . (temperature, moisture,bending )
X-ray survey now cancelled
Modified copy of slide from last year
7 microns random + 50 microns systematic (proportional to distance)

SCT endcap alignment from surveysModule internal alignment
Relative positions of the four detectors and two mounting holes.
Corrections of ~5 m known to ~1 m.
Pin alignment
Relative positions of the module mounting pins on discs.
Corrections of ~100 um known to ~10 um.
Disc alignment
Relative positions of the 9 discs in each endcap
Corrections of ~200 um known to ~100 um.
Module production database
Completed July 05
Understand and correct for small (1-2 um) systematic differences between surveys done at different sites.
Joe Foster. In progress.
Corrected final module data.
Joe Foster. Expected Jan 06
Tables associating module serial number with position mounted on disc.
Joe Foster. Endcap C complete. Endcap A expected December 05.
Tables of pin position offsets from nominal in each disc.
Collecting data from surveys done at Liverpool (Peter Sutcliffe) and NIKHEF (Patrick Werneke).
Steve Snow. Endcap C complete, endcap A discs 9,8,7,6,5,4 done.
Detector/module offsets from nominal in each disc.
Steve Snow, Joe Foster. Expected March 06.
Survey reports of disc alignment in each endcap.
First few reports available from endcap C.
Surveys should be repeated when the endcaps reach CERN.
Steve Snow. In progress.
combine Detector/module offsets from nominal in each endcap.
Steve Snow, Joe Foster. Expected May 06.
Learn how to load data into, and use data from, the conditions database. Upload this ? or this ? data
Paul Miyagawa. Expected July 06.

Disc surveysSurvey of module mounting pins on all endcap C (UK) discs is complete.
-150
-100
-50
0
50
100
150
1 2 3 4 5 6 7 8 9
Disc number
Ove
rlap
(m
icro
ns)
O-rms
O-max
O-min
M-rms
M-max
M-min
I-rms
I-max
I-min
O-tol
M-tol
I-tol
O-tol
M-tol
I-tol
Overlap statistics
Actual phi overlap between neighbouring modules will always be within 120 microns of the design value, and typically within 50 microns.
Strip pitch is 80 microns, design overlap is 5,8,18 strips. (I,M,O rings)
There will always be a small but useful overlap between modules to use for alignment with tracks.

NMR system
• Purpose and description of the NMR
• Overview of system
• Parts of the system
• Software for: Noise testsSignal tests
• Installation and Commissioning
• Configuration during field mapping
Steve Snow
26/10/05
Technical support in Manchester: Julian Freestone, Mike Perry
CERN contact: Pippa Wells
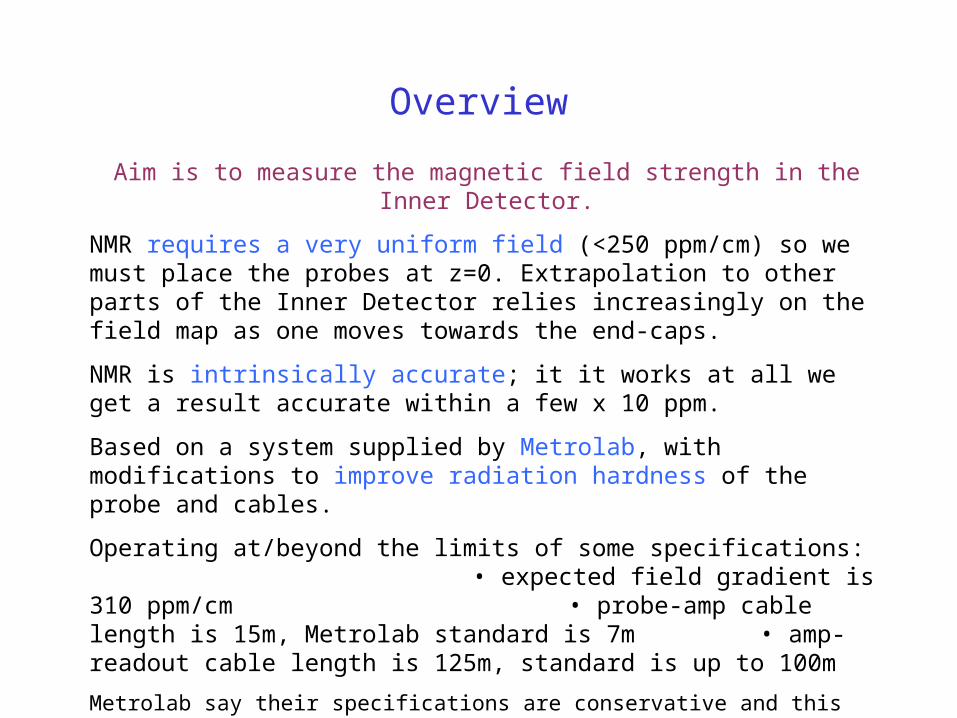
Overview
Aim is to measure the magnetic field strength in the Inner Detector.
NMR requires a very uniform field (<250 ppm/cm) so we must place the probes at z=0. Extrapolation to other parts of the Inner Detector relies increasingly on the field map as one moves towards the end-caps.
NMR is intrinsically accurate; it it works at all we get a result accurate within a few x 10 ppm.
Based on a system supplied by Metrolab, with modifications to improve radiation hardness of the probe and cables.
Operating at/beyond the limits of some specifications:• expected field gradient is 310 ppm/cm• probe-amp cable length is 15m, Metrolab standard is 7m• amp-readout cable length is 125m, standard is up to 100m
Metrolab say their specifications are conservative and this should be no problem.

NMR system
Standard Metrolab system with the addition of Pico 2-channel digitiser and PC to monitor noise, pickup, signal size, etc.
Grounded only at ID ground point.
Readout using LabVIEW on PC. Interface to DCS not yet defined.

Parts of the system
Probe
Probe in clamp on
cryostat wall
Amplifier
Readout
Cables
All of the hardware is ready. Some software still being developed.

Noise TestsIn lab, pickup depends strongly on layout of cables ; as soon as cables are laid in Atlas we want to measure noise and check it is not excessive.
Maybe an opportunity to immediately re-route or bundle cables more tightly together. Final test is the ability to lock onto the NMR resonance - not possible until much later, when solenoid is turned on.
-100
-80
-60
-40
-20
0
20
40
60
80
100
28 38 48 58 68 78 88
Frequency (MHz)
No
ise
(m
V)
r.m.s.
Max
Min
50 Hz
100 Hz
150 Hz
200 Hz
Noise test results in good conditions:r.m.s. ~ 20 mV, peaks < 100 mVmains pickup < random noise
The only thing likely to prevent the NMR system from working is noise pickup.
NoiseTest.VI - automates all the NMR tests we can do in absence of field.

Signal TestsWhen the Teslameter is locked on the NMR resonance, as well as reading out the field value we monitor peak height, peak asymmetry and noise (between peaks).
SignalTest.VI

Mapping time scale
2728293031323334353637383940414243444546474849505152 1 2 3 4 5 6 7 8 9 101112131415161718192021222324252627282930 31 323334353637383940414243444546474849505152 1 2 3 4 5 6 7 8 9 10111213 14151617181920212223242526
Jul '06May '06 Jun '06 Jun '07
ID A connection and testing
Aug '06 Sep '06
Chains
Endcap Cal. A services connection, test & commissioning
Muon Barrel A
Side A closed
Endcap Cal. C services
Fiel
d m
appi
ng
Endcap Cal. C testing & commissioning
VA
Barrel Calorimeter services, 1st fix on truck
Big Wheels C (TGC1)
JNEndcap Calorimeter C Services
1st fix
Barrel Toroid Coils 7-8
Muon brackets & rails
Platf. Remov.
ID services through Muons
Endcap cryo lines.
Barrel Calo services
Barrel Cryo lines
Barrel Toroid servicesBT testing &
commissioningPlatforms removal
Big Wheels C (MDT+TGC2+TGC3)Endcap Toroid C
Endcap Toroid C cooldown & testing
Small Wheel C
JN
Endcap Toroid AEndcap Toroid A
cooldown & testing
JT?
ID Barrel connection and testing IDC connection and
testing
Small Wheel A
JF
HS arches preparation JF Side A
LAr
JT
Big Wheel A, (TGC1)
Big Wheels A (MDT+TGC2+TGC3)
Muon Barrel C
JD
JD
Sole
noid
Endcap Calo A
Barrel Calo testing and commissioning
LAr
BMS
HS arches
May '07
Full
mag
net t
est?
Feb '07 Mar '07Oct '06 Jan '07Dec '06
VT
Glo
bal C
omm
issi
onin
g
VTVA
Apr '07
glob
al te
sts,
pum
p do
wn
& b
ake
out
VJ
Pixel connection and testing
Oct '05
Services 1st fix
Aug '05 Mar '06
Chi
mne
y
Muon services
Che
ck ra
ils ID services along Barrel
Cable chains
Nov '06Apr '06Dec '05 Jan '06 Feb '06Jul '05 Sep '05 Nov '05
JF
VJ
Side CJF
EO, side C
Barrel
EO, side A
Global Commissioning
Full magnet test
Latest ATLAS schedule shows mapping in April/May.
We will prepare for that date but I would be surprised if it does not slip by 2 or 3 months.

Looking forward
0%
10%20%
30%40%
50%
60%70%
80%90%
100%
2006 2007
Field map
NMR
Survey alignment
Track alignment
SuperNEMO
My changing priorities in the next year.

Seminars11/01/0618/01/06 Experiment Brian Fulton (York) COBRA25/01/06 Theory01/02/06 Schuster08/02/06 Experiment Yoshi Uchida (Imperial) KamLAND15/02/06 Experiment Tara Shears LHCb22/02/06 Theory01/03/06 Schuster08/03/06 Experiment Amanda Cooper-Sarkar15/03/06 Theory22/03/06 Experiment Chris Booth MICE29/03/06 Experiment Alfons Weber MINOS30/03/06 Experiment Emily Nurse CDF05/04/06 Schuster
Not yet fixed:
Martin Erdmann - Auger, Dino Jaroszynski - plasma acceleration.
Related Documents











