A Technique for the Numerical Solution of Certain Integral Equations of the First Kind* DAVID L. PHH~LIPSt Argonne National Laboratory, Argonne, Illinois Introduction The general linear equation may be written as b p h(x)f(x) --~ I K(x, y)f(y) dy = g(x) Ja (a<=x<=b) where the known functions h(x), K(x, y) and g(x) are assumed to be bounded and usually to be continuous. If h(x) ~- 0 the equation is of first kind; if h(x) ~ 0 for a -<_ x ~ b, the equation is of second kind; if h(x) vanishes somewhere but not identically, the equation is of third kind. If the range of integration is infinite or if the kernel K(x, y) is not bounded, the equation is singular. Here we will consider only nonsingular linear integral equations of the first kind: b ~ K(x,y)f(y) dy = g(x) (a ~ x ~ b) (l) There is extensive literature on equations of the second kind, but literature on linear equations of the first kind is sparse. However, several, methods for solving equations of the first kind numerically have been proposed [1-10]. No method has been very successful for arbitrary kernels when the function g(x) is known with only modest accuracy. The reason for this is inherent in the equa- tion itself. Think of the equation as a linear operator, operating on f(y) to pro- duce g(x). This operator does not have a bounded inverse (it may not even have an inverse, but we will assume here that it does) which can be seen as fol- lows. Let f(y) be the solution to (1) and add to it the function fm = sin my. /, b For any integrable kernel it is known that gm= J. K(x, y) sin (my) dy -~ 0 a as m -~ ~. Hence only an infinitesimal change g,~ in g causes s finite change f~ inf (i.e. the equation is unstable).,Also, one would expect that g,~ -~ 0 as m --~ faster for flat smooth kernels than for sharply peaked kernels (indeed if K(x, y) were the a-function, K(x, y) = a(x -- y), then g,~ = fm would not approach zero). Hence we conclude that the success in solving equation (1) by any method depends to a large extent on the accuracy of g(x) and the shape of K(x, y). * Received June, 1961. t Based on work performed under the auspices of the U. S. Atomic Energy Commission. 84

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Technique for the Numerical Solution of Certain
Integral Equations of the First Kind*
DAVID L. PHH~LIPSt
Argonne National Laboratory, Argonne, Illinois
Introduction
The general linear equation may be writ ten as
b p
h(x)f(x) --~ I K(x, y)f(y) dy = g(x) Ja
(a<=x<=b)
where the known functions h(x) , K(x, y) and g(x) are assumed to be bounded and usually to be continuous. If h(x) ~- 0 the equation is of first kind; if h(x) ~ 0 for a -<_ x ~ b, the equation is of second kind; if h(x) vanishes somewhere but not identically, the equation is of third kind. If the range of integration is infinite or if the kernel K(x, y) is not bounded, the equation is singular. Here we will consider only nonsingular linear integral equations of the first kind:
b
~ K(x,y) f (y) dy = g(x) (a ~ x ~ b) ( l )
There is extensive li terature on equations of the second kind, but literature on linear equations of the first kind is sparse. However, several, methods for solving equations of the first kind numerically have been proposed [1-10]. No method has been very successful for arbi t rary kernels when the function g(x) is known with only modest accuracy. The reason for this is inherent in the equa- tion itself. Think of the equation as a linear operator, operating on f(y) to pro- duce g(x). This operator does not have a bounded inverse (it may not even have an inverse, but we will assume here that it does) which can be seen as fol- lows. Let f(y) be the solution to (1) and add to it the function fm = sin my.
/ , b
For any integrable kernel it is known tha t gm= J. K(x, y) sin (my) dy -~ 0 a
as m -~ ~ . Hence only an infinitesimal change g,~ in g causes s finite change f~ i n f (i.e. the equation is unstable).,Also, one would expect tha t g,~ -~ 0 as m --~ faster for flat smooth kernels than for sharply peaked kernels (indeed if K(x, y) were the a-function, K(x, y) = a(x -- y), then g,~ = fm would not approach zero). Hence we conclude that the success in solving equation (1) by any method depends to a large extent on the accuracy of g(x) and the shape of K(x, y).
* Received June, 1961. t Based on work performed under the auspices of the U. S. Atomic Energy Commission.
84

C E R T A I N I N T E G R A L E Q U A T I O N S O F T H E F I R S T K I N D 8 5
Description of Technique
If the straightforward matrix approximation to equation (1) is used, it is found tha t as the mesh width decreases, the solutions at first become more ac- curate, but eventually begin to get worse. How soon the solutions begin to get worse depends on the accuracy of g(x) . Larger errors in g cause the solutions to get worse sooner. Also, the error in each of the approximate solutions tends to be an oscillatory function of x.
Since the function g(x) is not known accurately, we should state the problem a s
f v K (x , y ) f ( y ) dy = g(x) + e(x) (a <- x <- b) (2) a
where e(x) is an arbitrary function except for some condition on the size of
F ~(x), such as I ~(x) I =< M or p(x)E2(x) dx < 2~, p(x) > 0. Instead of a a
unique solution of (2) we get a family ~ of solutions. The real problem then is to pick out of the family of functions ~ the t rue solution f. This cannot be done without more information about the problem than is given in equation (2). We will assume here tha t the functional form of f is not known. I f it were known we could use a least square fit to find a best fit to f. However, we will assume here that f is a reasonably smooth function. With this assumption the best approxi- mation t o f we can choose is probably the function f8 C ~ which is the smoothest in some sense. Of the various smoothness conditions, we choose the following (assuming the f have pieeewise continuous second derivatives):
b f b f (f~t)2dx = min ( f f )2dx . (3)
In order to solve numerically (2) and (3) we make a matrix approximation to them. We subdivide the interval into n parts by the points a = x0 < xl < x2 < • • • < x r, = b, and replace the integral equation (2) by the following linear
system,
wikiifi = gi + ei (j = O, 1, . . . , n ) (4) i=0
where f~ = f ( x i ) , gi = g(xi) , ei = e(xj), lcii =- K ( x i , x~), and the w~ are weight factors whose values depend on the quadrature formula used. However, for simplicity, we will assume tha t the x~ are uniformly spaced. For the condi-
tion on the magnitude of e(x) we take
~ e ~ ( 5 ) i~0
2 where the where d is a constant (more generally one can take ~ = 0 p~e~ = e 2 p~ = 0 are weights). The anMogous problem to (3) is to look for the vector

8 6 D A V I D L. P H I L L I P S
f~ = (H, f l ~, " '" , f~) such that
2 " ~ ~ ~ ( f ,+l - 2 f,~-l) (6 ) i=0 f~3* i=0
where ~* is the set of vectors satisfying (4) and (5) (here we assume f is zero Outside the interval (a, b) and set f-1 = f~+l = 0). LeE us introduce the follow- ing matrix notation:
A =- (w~lcj,), A -~ =- ( a , j ) .
Equation (4) can be written in the form
f = A-lg + A-I~. (7)
This shows that the f~ are linear functions of the ~i and that
of, _ ~ ( i , j = o, 1, . . . , n ) . (s) Oei
From (6), (8), and the constraint (5), we see that the conditions f , must satisfy ean be written as follows:
El = e i=0
(f~+l -- 2H + ]~-1) (ai+l.~ -- 2aii + ai-l,s) + 7-1ej = 0 i=0
( j = O, 1, . . . , n) (9)
where ~-1 is the Lagrangian multiplier. I t will be much simpler to solve these equations for f, if we take ~, as known and e 2 as an unknown instead of the other way around. This is equivalent to replacing the conditions (5) and (6) by the single condition that f, be the vector (satisfying (4)) that minimizes the ex- pression
~' ~-~ (S,+~ -- 2f, +f , -~)2 + ~ ~,2 (10) i~0 i~0
where ~/is a given constant. From (10) we see tha~ ~/should be non-negative and that for ~ = 0 the whole problem reduces to just the straightforward matrix approximation to (1), Af = g. Equations (9) can be writ ten in the matrix form
~ , B L + ~ = 0 (11)
where B = (~ , ) and
fhk = ak-2,z -- 4ak--l.l + 6akz -- 4ak+l,, + ak+~,l (k,l = 0, 1, " ' . , n) . (12)
In (12) we define a_2,~ = - -aoa, a - la = 0, a~+t,z = 0, and a~+%z = - a ~ t . Using (11) and the fact that f, satisfies (7) we solve for f, and e a n d gee
f. = (A + ~,B)-~g, r = - ~ , B f , . (13)

C E R T A I N I N T E G R A L E Q U A T I O N S O F T H E F I R S T K I N D 87
From equations (13), the matr ix method described here merely replaces A by A + ~B where B is a certain matr ix whose elements depend only on A and ~/ is an arb i t ra ry non-negative pa ramete r which controls the amount of smoothing. Increasing ~ produces greater smoothing. I t follows from the second equation in (13) and (5) tha t e is approximately proportional to ~/so tha t only a very few v~flues of ~ need to be used in order to find one giving e the desired magnitude. However, one additional matr ix inversion is needed for each new value of -¢ used. The value of e is determined from the accuracy of the g~-.
,Vzamples
Example 1.
where
Let the problem be the following:
f f K ( x - X)f(z) dx = g(X) 3
7rz K(z) = 1 + c o s y , l z] =< 3,
=0, l z l > 3 ;
( 1 3 ) 9 ~rk g(z) = ( 6 + X ) 1 - - ~ c o s - ~ s i n - ~ - , I z l =< 6,
=0, I z l > 6 . The solution to this problem is f(x) = K(x). Hence we can easily check the
numerical solution against the t rue solution. Let us first take n = 12 (13 points) and use Simpson's rule for the quadrature formula. The truncation error is about .4. The values of g are rounded off so tha t the max imum error in g(kj) is .00005. Table I and Figure 1 give the comparison between the true solution and the numerical solution for several choices of % Since the solution is symmetr ic
TABLE I
k t r u e va Iue s o f /
0 2.0000 1 1.5000 2 .5000 3 .0000 4 .0000 5 .0000 6 .0000
a v e . 1~5 I . . . . .
m a x . ]e~- [ . . .
,y
2.94 1.1~
• 6 ~
.01
.0(
.0{]
.0G
0
0
[ [ [ )
)
)
~, = .0011
2.356 1.404
.388 • 077
--.034 .005
- - .012
.010
.016
~ '= .011
2.082 1•478
• 464 - .002
. 0 3 1
•029 -.128
.020
.035
"t' ~ .03
2.017 1.488
•503 - - .016
.019 • 038
- - . 1 3 3
.026
• 053
~, = .1
1.948 1•489
.559 - - •014 --.026
.034 -- .052
• 047
•096
T ~ .5
1.843 1.476
• 651 .016
- - .105 •009 • 1 1 0
• 1 0 5
.203
~ ' = 1
1.796 1.463
.686
.042 --. 120 --.009
• 131
• 1 4 0
.242

~ D A V I D L . t ' H [ L I A P S
a b o u t z e r o , o u t y u o n m e g a t i v e v a u e s o f ;', a r e l i s t e d in t h e ta, b lc , ;\1~(), t t.~ a v e r a g e
ej i a n d m a x i m u m %. i a r e l i s t e d f o r e a c h %
H e r e t h e t r tmc : :~ t ion e r r o r , w h i c h acf, s m u c h l i ke a n e r r o r i~ .q, is bound( . , d by
.4. H e ~ e e w e e x p e c t t o get, t h e b e s t r e s u l t s f o r s o m e v a l u e o f 7 for
w h i c h avG. ei i < .4. H e r e v . . . . 03 is t h e b e s t c h o i c e e v e n t, h o u g h a, ve.. I e i ] =
. 0 2 6 , w h i c h is eov, s i d e r a b t y sma , l l e r W a n .4. N o w c o n s i d e r t h e s a m e p r o b l e m wi th
-n ...... 24 ( 2 5 p o i n t s ) . H e r e t h e t r u n c a t i o n e r r o r is b m m d e d b y .025 . T a b l e I I
"TRUE CURVE,
~.y = 0
.......... Y: .0011 j , ~ J
" + 7 :.@3
,'= .5
I j '\
-a - 4 J 2 I _ I I t 1 J I ]"
-3 -2 - I 0 I 2 3 4 5 6
FIG, 1
T A B L E I I
[ P d e v a l u e s o f f ~ = 0 v = .0025 ~ = . 0 2 7 = .1 v = .5 ~ = I
3.0016 1.3994 2.2480
.7516
.7463
.10% - - .0106
.0078 - - . 0 1 3 5
.0062 - - . 0 1 1 0
.0032 i .00;~
0 2, (~}000 . 5 1 . 8 ( ~ 0 3
1 1.50~g9 1.5 1.0fN00 2 .500O0 2 .5 .13397 3 0 3 .5 0 4 0 4 .5 0 5 0 5 .5 0 6 0
1.9992 1.8(380 1.4982
• 9945 • ~ ) 0 6
.1472 --°0006 - .0160
• 0002 .(K)92 • 0024
- . 0O34 - . 0055
2.0049 1.8692 1,4900
•9888 .5093 .1601
- - . 0 0 2 5
- - . 0 3 1 8
- - .0060 ,0194 .0163
- - .0052 - - ,0312
2,0027 1. 8663 1.4870
• 99(X) ,5170 • 1680
-- ,0039 -- .0414 -- •0125
• 0220 • 0229
- - .0032 - - ,0382
1. 9853 1,8531 1,48(51 1.0009
,5350 . 1831
-- ,0018 -- ,0531 --, 0296
• 0094 • 0226 • 0120
- - . 0074
1. 9672 1.8395 1.4E16 1 . 0 1 2 1
• 5525 • 1967 .0014
- . 0627 - - . 0463 - , 0050
• 0202 • 0275 • 0274
. . . . . . . 0 .00t0 ! . 0 0 t 7 .003r P .0155 i .0280
max . '~ ~i i . . . . . . 0 .(X)27 .0059 ,0122 i .0352 .0594 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . k . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................................................ : ........................................ : ..................................

] - -
0.
- 6
C E R T A I N I N T E G R A L E Q U A T I O N S O F T H E F I R S T K I N D
¥ = 0
, = '1 I
+ + + + -.t- + + ~ '
t I I i I ! I t I I I - 5 - 4 --3 - 2 -- I 0 I 2 3 4 5
F I G . 2
TABLE III
X t r u e v a l u e s o f f ~, = 0 ~ ' = .0001 ~ = .001 3' ~ .01 '~ = .1 ~' = 1
89
0 .5
1 1.5 2 2.5 3 3 .5 4 4 .5 5 5.5 6
2.00000 1.86603 1•50000 1•00000
.50000 •13397
0 0 0 0 0 0 0
3•289 1.184 2.825
•501 1.150
- • 0 9 7 .513 .382 .948
- . 4 9 5 .947 -.325 .412
1.987 1.856 1.540 1.003
•451 .159 •002
--.031 • 033 .019 -- .019 -- .018 • 049
1•9889 1.8663 1.5101
.9978
.4908
.1440 --.0010 --.0141
.0117
.0113 - . 0 0 9 1 - . 0 0 8 4
.0199
2.0020 1. 8692 1.4942
• 9906 • 5042 • 1542
--.0016 --.0246 - .0010
• 0162 • 0093
--.0058 --.0182
2.0028 1. 8665 1.4871
• 9896 •5162 • 1674
-- .0038 --.0406 -- .0115
.0225 • 0227
--.0037 --.0386
1.967 1.840 1.484 1.012
.552
.197 •002
--.062 --.046 - . 0 0 5
.020
.027 •027
ave. [ ej" [ . . . . . . . 0 .0016 .0018 .0020 .0040 •028
max. [ ej I . . . . . . 0 .0026 .0032 .0056 .010 .057
a n d F i g u r e 2 g i v e t h e c o m p a r i s o n b e t w e e n t h e t r u e s o l u t i o n a n d t h e n u m e r i c a l
s o l u t i o n fo r s e v e r a l v a l u e s of ~. H e r e t h e s m o o t h i n g e f fec t of ~, o n t h e o s c i l l a t i o n d u e t o t h e i l l - c o n d i t i o n of
t h e m a t r i x is m u c h g r e a t e r t h a n t h e s m o o t h i n g e f fec t o n t h e s o l u t i o n . T h u s h e r e
i t is p o s s i b l e t o p r a c t i c a l l y e l i m i n a t e t h e o s c i l l a t i o n d u e t o t h e i l l - c o n d i t i o n e d
m a t r i x w i t h o u t a p p r e c i a b l y a f f e c t i n g t h e s o l u t i o n .
N o w c o n s i d e r t h e s a m e p r o b l e m w h e r e t h e g ' s h a v e b e e n f u r t h e r r o u n d e d off.
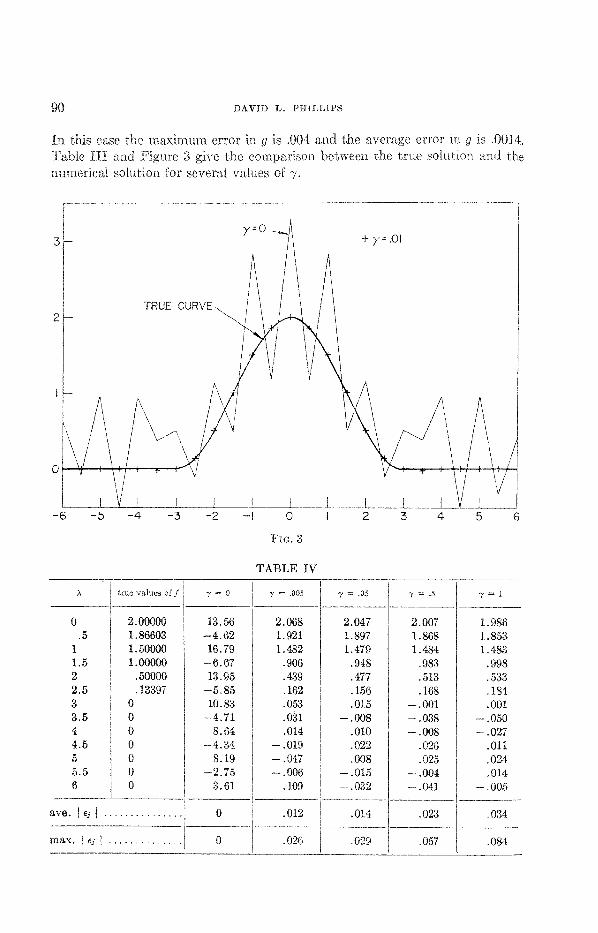
9 0 DAVID L. PHILLIPS
In this case the m a x i m u m er ror in g is .004 and the average er ror in g is .0014.
Tab le I I t and F igu re 3 give the compar i son be tween the t rue solut ion and the
numer ica l solut ion for severM values of 7.
I - -
TRUE
7 : 0
-6 - 5 - 4 -3 -2 -I 0 I 2
FIG. 3
+ 7 "= .01
3 4 5 6
TABLE IV
X t r u e v a l u e s o f f 7 = 0 7 = .005 7 = .05 7 = .5 7 = 1
0 .5
1
1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
2.00000 1.86603 1.50000 1.00000 .50000
• 13397 0 0 0 0 0 0 0
13.56 -4 .62 16.79
-6 .67 13.95
-5 .85 10.83
-4 .71 8.64
-4 .34 8.19
--2.75 3.61
2.068 1.921 1.482
.906 • 439 . 1 6 2
.053
.031
.014 - - .019 - .047 --.006
.109
2.047 1.897 1.479
.948
.477
. 1 5 6
.015 -- .008
.010
.022
.008 - - .015 -.032
2.007 1.868 1.484
.983
.513
.168 --.001 --.038 - . 0 0 8
.026
.025 - , 0 0 4
- .041
1.986 i. 853 1.483
.998 • 533 .184 .001
--.050 --.027
.011
,024 .014
-- .005
ave. I e~ I .............. } 0 .012 .014 .023 .034
I max. I ~J ! . . . . . . . . . . . . . . ] 0 .026 .029 .057 ,084

17
1 6 - -
t5 - -
!4 - -
I3 - -
12 - -
I I - -
I0 - -
9 - -
8 - -
7 -
6 - -
5 - -
4 - -
3 - -
2 - -
I - -
0 - -
- 3 - -
- 4 - -
- 5 - -
- 6 - -
C E R T A I N I N T E G R A L E Q U A T I O N S OF T H E F I R S T K I N D
~ Z = o
+ ~ ' = .5
- 6 - 5 - 4 - 3 - 2 - I 0 i 2 3 4 5 6
F I G . 4
91
Notice that for 1' = 0 there is considerably more oscillation than in the previ- ous case. However, the oscillation is smoothed out just as before by using a suitable value of %
Now consider the same problem where the g's have been even further rounded off. In this case the average error in I g I is .02 and the maximum error is .041. Table IV and Figure 4 give the comparison between the true solution and the numerical solution for several values of %
Notice that for 7 = 0 the solution is completely dominated by oscillation. The errors in g have been magnified in f so much that the solution is completely use- less. However, for ~, = .5 the solution is reasonably good, especially near the peak which is the most important region. Also notice that the average ] ej] for
= .5 is of the same order of magnitude as the average error of the g's.

92 D A V I D L. P H I L L I P S
Example 2, The p rob lem is the following: 30
f t<(x - x)f(z) = g(x) dz 30
, " ' t ' V . where K(z) g(z) and f (z ) are g iven in t abu la r form in t a ) m K(z) and -a. o g(z) are also p lo t ted in ]~,gure 5.
The va lues of g were ob ta ined f rom tile t abu la t ed va lues of f ( z ) and K(z) by numer ica l in tegra t ion . T h e values of g have errors which average a bou t .0t
in magn i tude . The m a x i m u m error in g is about, .02• Let us first t ake n - 14
(15 po in t s ) and use S impson ' s rule for the q u a d r a t u r e fo rmula a n d solve for
f (z) assuming K ( z ) , g(z) given. The t r u n c a t i o n error is less t h a n .66. Tab le VI
and F igure 6 give the compar ison be tween the t rue solut ion and the numer ica l
solut ion for several choices of 1/.
TABLE V
-30 - 2 8 -26 -24 -22 -20 -18 -16 -14 -12 -10 - 8 - 6 - 4 - 2
0
g (z)
. 0 1 0 0
• 0100 .0110 • 0170 • 0305 • 0405 • 0585 • 0869 • 1309 .2018 • 3235 .5469 .9621
1.6301 2.4047 2.9104
K (z)
.1184
.1311
.1464
.1651 •1883 .2179 .2563 .3077 .3788 .4816 .6380 .8914
1•3333 2.1483 3.5108 4.3600
I
f(z)
.0000
.0000
.0019
.0345 •0965 .1321
g(z)
2 2•8912 4 2.4586 6 1.9049 8 1.4144
10 1.0282 12 .7411 14 .5409 16 .4083 18 .3214 20 .2623 22 .2201 24 .1886 26 .1580 28 .1270 30 .0780
K(z) l(z)
3.0628 •1096 1.6329 •0584
.8806 •0349
.5095 •0173
.3137 .0107
.2021 .0028
.1341 .0005
.0906 .0000
.0614
.0413
.0269
.0165
.0089
.0031
.0013 .0000
K(z) = 0 for l z i > 30
3 -
I -
~K (z)
-50 -20 -10 0 IO 20 50
FIG. 5

C E R T A I N I N T E G R A L E Q U A T I O N S O F T H E F I R S T K I N D 93
T A B L E VI
t rue va lues z o f f
- -28 0 - 2 4 - 2 0 - -16 - -12 - -8 0 - - 4 .0345
0 .1321 4 •0584 8 •0173 12 .0028 16 0 20 24 28 0
a v e . [ ej
m a x .
~ = 0
- - I • 0011
- - .0001 .0002
- - .0001 • 0004
- - •0011 .0608 • 0900 .0998 • 0 1 3 4
.0061 • 0000
-- .0001 .0012
- - .0126 i
7 = .001
.0011 - - . 0 0 0 1
.0002 - - . 0 0 0 1
.0004 - - . 0 0 1 1
.0607
.0900
.0998
.0134
.0061 - . 0 0 0 0 - . 0 0 0 1
.0012 - . 0 1 2 6
:00001
.00004
~/ = .01
.0011
- . 0 0 0 1 • 0002
- - .0001 .0004
- - . 0 0 1 1
• 0607 • 0900 .0997 .0135 • 0060 • 0000
- . 0 0 0 1 .0012
- . 0 1 2 6
• 0001
.0004
7 = .1
.0011 - . 0 0 0 1
.0001
.0000
.0001 - •0009
.0602 .0903 .0990 .0138 .0056 .0001
- . 0 0 0 1 .0012
- . 0 1 2 5
.0013
.004
" / = 1
•0008 .0000
--.0001 •0004
- - .0017 .0004 .0572 .0922 .0937 .0161 .0031 .0005 .0001 .0009
- - .0116
] e j
-s:
/I~.~----- 7 = O, n = 3 0
• 009
.03
7 = 10 ? = 20
.0001 - . 0 0 0 3
.0001 .0004
.0007 .0010 • 0001 - . 0 0 0 6
- . 0052 --•0059 .0037 .0054 .0538 .0542 .0943 .0931 .0810 .0776 .0222 .0245
- .0003 .0003 - .0001 - - .0008
.0014 .0011 - . 0000 - . 0 0 0 1 - . 0080 - . 0 0 6 2
• 026 .033
.10 .14
4
5
2
I - -
. I 0 - -
. 0 9
. 0 8 --
. 07 --
. 06 --
. 05 --
. 0 4 - -
. 05 - -
, 0 2 1-- . 0 1 -
O - -
TRUE
- 2 4 - 2 0 -16 -12 - 8 - 4 0
FzG. 6
+ x : l , n : 3 0
_ j - y = O, n=14
14
4 8 12 14 2 0 24

94 D A V I D L . P H I L L I P S
T h e p o o r r e su l t s h e r e are d u e to a l a rge t r u n c a t i o n e r ror . T h e p a r a m e t e r 3'
h a s to be chosen so l a rge t h a t t h e t r u e s h a p e of t h e f u n c t i o n is n o t i c e a b l y af-
f e c t ed . H e n c e t.he o sc i l l a t i on a n d t h e t r u e s h a p e c a n n o t be s e p a r a t e d .
N o w c o n s i d e r t h e s a m e p r o b l e m w h e r e we t a k e n = 30 (31 p o i n t s ) . H e r e
t h e u p p e r b o u n d fo r t h e t r u n c a t i o n e r ro r is .02, w h i c h is t h e s a m e o r d e r of m a g -
n i t u d e as the errors in g.
Table VII and Figure 6 give the comparison between the true solution and
the numerical solution for several choices of 7.
TABLE VI I
true values z off
--30 --28 --26 --24 --22 --20 --18 --16 --14 --12 --10 --8 0 --6 .0019 --4 .0345 - - 2 .0965
0 .1321 2 .1096 4 .0584 6 .0349 8 .0173 10 .0107 12 .0028 14 .0005 16 0 18 2O 22 24 26 ] --.0037 28 .0025 30 0 --.0139
ave. l~s I . . . . . . . . . . . --O
i m a x . t o s l . . . . . . . . . . i
7 = 0 7 = .01 7 = .1
i - - • 0033 .0015 .0015
--.0002 .0008 .0007 .0006 --.0018 --.0015
--.0012 --.0001 --.0001 .0038 .0019 .0015
--.0011 .0005 --.0002 .0008 .0000 --.0005
--.0002 .0000 .0002 .0002 .0000 --.0001
--.0001 .0001 --.0004 .0002 --.0013 .0018
--.0002 .0018 --.0001 .0067 --.0018 --.0023 .0262 .0334 .0386 .1439 .1242 .1037 .0973 .1086 .1212 .1610 .1387 .1157 .0462 .0556 .0633 .0500 .0360 .0296 .0143 .0188 .0193 .0151 .0097 .0107 .0023 .0037 .0033 .0012 --.0001 .0003 .0000 .0002 .0002 • 0000 .0001 --.0001 .0002 --.0001 --.0001
--.0011 --.0003 .0007 .0014 .0011 --.0002
--.0036 .0001 .0028 .0012
- . 0 1 5 2 --.0125
o o 3 - - . ] _ _
0 .007 .017 i
.0104
.0041
.0003 --.0002
.0002
.0001 --.0001 --.0002 --.0001 .0001
.0013 .0012 --.0001 - - . 0 0 0 5
- - . 0 0 8 9 - - . 0 0 7 3
.004
.020 i .020
7 = 2 7 ~ i 0
.0010 .0011
.0004 .0004 --.0005 --.0001 --.0002 --.0001
.0005 .0002
.0004 .0000 - . 0 0 0 2 - . 0004 --.0006 --.0001
.0001 .0014
.0014 .0011 --.0002 --.0032 --.0034 - . 0049
.0050 .0090 • 0406 .0446 .0943 .0919 • 1246 .1196 .1081 .1066 .0658 .0696 .0328 .0357 .0171 .0156 .0099 .0077 .0043 .0045 .0006 .0016
- . 0003 - .0001 .0000 --.0004 .0001 - . 0001
- . 0 0 0 1 .0002 .0002 .0005 .0010 .0003
--.0007 --.0010 --.0058 --.0034
.006 .011
.024 .043

C E R T A I N I N T E G R A L E Q U A T I O N S OF T I I E F I R S T K I N D
-30 -28 -26 -24 -22 -20 -18 -16 -14 -12 -10 - 8 - 6 -4 .2 0 2 4 6 8 10 12 14 16 18 2O 22 24 26 28 30
I trUeo~llles
. . . . . 0 l
0 .0019 .0345 .0965 .1321 .1096 .0584 .0349 .0173 .0107 .OO28 .0005
I
3 , = 0
.0024
.0006 --.0025
.0004
.0039 -.0037 -.0109
.0390 - . 1 3 8 5
.0760 -.1689
.0613
.0405 --.0330
.2342
.0789
.1026
.1369 --.1525
.0834 --.0700
.0286 --.1006
.0744 --.2102
.1270 --.1998
.0318
.0757 --.0490
.0782
TABLE VIII
3 , ~ 2 7 = . 1 7=I
.0056 .0014 --•0014 .0001
.0017 .0011
.0001 --.0003
.0008 --.0023 --.0052 --.0003
.0177 .0072
.0021 .0037 -.0160 --,0072
.0010 --•0099 -.0349 --.0041
.0264 .0151
.0212 .0155
.0127 .0290
.1239 .0867
.1124 .1236
.1165 .1191
.0910 .0752 --.0215 .0206
.0223 .0125
.0225 .0120 --.0110 --.0020
.0001 --.0080
.0003 --.0022 - - . 0 1 7 7 .0053
.0272 .0064 - - . 0 4 8 8 --•0123
.0017 .0012
.0498 .0184 --.0177 --•0015
.0013 --:0256
.022 .036
.067 .094
.0007
.0004 •0009
--.0007 --.0020
.0004
.0062
.0032 -.0068 --.0096 --.0018
.0129
.0151
.0316
.0846
.1234 •1177 .0745 .0262 .0117 .0085
- .0012 - .0065 --.0020
.0045
.0045 - .0068
.0017
.0129 - .0008 - .0215
3 , = 5
.0009 • 0007 • 0003
- - .0011 --.0013
.0013 • 0048 .0020
-- .0058 -.0080 --.0010
.0095
.0151
.0356 • 0840 • 1210 • 1151 • 0753 • 0317 • 0109 .0046
-- .0009 --.0041 -- .0017
.0026
.0029 -- .0019
.0025
.0075 --.0009 --.0145
T = I O
.0013 •0007
--.0002 --•0012 --.0007
.0017 •0038 .0012
- - . 0 0 4 8
--.0066 --.0016
.0067
.0157
.0393
.0842
.1180
.1128
.0766
.0352
.0107
.0023 --.0013 --.0028 - - . 0 0 1 2
.0015
.0023
.0003 • 0028 .0049
- .O010 -.0103
ave. I e j { . . . . . . . . 0 .038 .040 .041
max. l eJ ! . . . . . . . 0 .104 .119 .132
9 5
N o t i c e t h a t the best va lues of 3' are the ones for which the max I e~] is ap-
p rox ima te ly the same as t h e m a x i m u m error in g. Also notice tha t the peak is
rounded off a small amoun t . This is unavo idab le wi th t h e p r e s e n t me thod .
F ina l ly , consider the same prob lem where the g's are g iven less accura te ly .
Le t the errors be about 5 per cent of t he peak value• (This s imulates a cer ta in
p rob lem f rom expe r imen ta l physics•) T h e m a x i m u m error in g is abou t •15.
Tab l e V I I I and F igure 7 give the compar i son be tween the t rue solut ion ( for
accura te g) and the numer ica l solut ion for several va lues of 7.

96 DAVID L. PtlI:LLIP~3
22
. 20 - -
. 18 - -
. 16 - -
. 14 - - -
. 12 - -
. I 0 - -
. 08 - -
. 06 - -
. 04 - -
, 02 - -
° l - .02
- .04
- .06
- .08
- .16 I - . t8 }--
-zo ~ I
- 2 8
TRUE
=0
+ y : 2
I I I 1. I I I t t I 1 _ - 2 0 < 2 - 4 0 4 12 20 28
Fro. 7
Notice that for T = 0 the solution is dominated by oscillation. The best values of v are 1 and 2. For these values the error in the peak value is about 7 p e r cent, a reasonable value since the maximum error in g is about 5 per cent. For the best values of T the max l eJi is about .1, somewhat lower than the maximum error in g. This is probably because of the unusually large errors in ~?.
Sumrr~ary
The method described here should work reasonably well on problems where the unknown function f is assumed to be a relatively smooth function. The truncation error should be as small a.s, or smaller than the errors in g. The most difficult task is to choose v. When the errors in g are relatively small, ~/should probably be chosen such that. e is approximately the same magtfitude as t:hese errors. When the errors in g are relatively large, as they are in the last par t of example 2, ~/should probably be chosen such that e is somewhat smaller l~han

CERTAIN INTEGRAL EQUATIONS OF THE FIRST KIND 97
these errors. I n a n y case several values of 7 should be tr ied and the best value should be the one t h a t appears to take ou t the oscillation wi thout appreciably smoothing the funct ion f.
REFERENCES
1. C~ou% P. D. J. Math. Phys. 19 (1940), 34. 2. CROUT, P. D.; AND HILDEBRAND, F.B . J. Math. Phys. 20 (1941), 310. 3. DIXON, W. R.; AND AITKEN, J. t-I. Canad. J. Phys. 36 (1958), 1624. 4. FOX, T.; AND GOODWIN, E . J . Philos. Trans. Roy. Soc. London. A 245 (1953), 501. 5. GOLD, R.; AND SCOFIELD, N. E. Bull. Amer. Phys. Soc. 2 (1960), 276. 6. t~REISEL, G. Proc. Roy. Soc. London. A 197 (1949), 160. 7. N~(STnO~, E . J . Acta Math. 5~ (1930), 185. 8. R~z , A. Ark. Mat. Astr. Fys. 29A No. 29 (1943). 9. VAN D E t-IuLsT, H. C. Bull. Astr. Inst. Netherlands 10 (1946), 75.
10. YouNo, A. Proc. Roy. Soc. London. A224 (1954), 561.
Related Documents






![Numerical Renormalization Group studies of Quantum ... · renormalization group method [1], a numerical technique which allows for an accurate calculation of properties of quantum](https://static.cupdf.com/doc/110x72/5f479d66a20d315b8158f961/numerical-renormalization-group-studies-of-quantum-renormalization-group-method.jpg)




