A Stable and Conservative High Order Multi-block Method for the Compressible Navier-Stokes Equations JanNordstr¨om a,b,c,* , Jing Gong c , Edwin van der Weide d Magnus Sv¨ ard e a School of Mechanical, Industrial and Aeronautical Engineering, University of the Witvatersrand, PO WITS 2050, Johannesburg, South Africa b Department of Aeronautics and Systems Integration, FOI, The Swedish Defense Research Agency, SE-164 90 Stockholm, Sweden c Department of Information Technology, Scientific Computing, Uppsala University, SE-751 05 Uppsala, Sweden d Faculty of Engineering Technology, University of Twente, PO Box 217, 7500 AE Enschede, The Netherlands e Center of Mathematics for Applications, University of Oslo P.B 1053 Blindern N-0316 Oslo, Norway Abstract A stable and conservative high order multi-block method for the time-dependent compressible Navier-Stokes equations has been developed. Stability and conserva- tion are proved using summation-by-parts operators, weak interface conditions and the energy method. This development makes it possible to exploit the efficiency of the high order finite difference method for non-trivial geometries. The computa- tional results corroborate the theoretical analysis. Key words: Navier-Stokes, finite difference, high order, stability, conservation * Corresponding author, Email address: [email protected] 1 This work was done while the first two authors were visiting CTR, The Center for Turbulence Research at Stanford University. Preprint submitted to Elsevier 9 September 2009

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Stable and Conservative High Order
Multi-block Method for the Compressible
Navier-Stokes Equations
Jan Nordstrom a,b,c,∗ , Jing Gong c, Edwin van der Weide d
Magnus Svard e
aSchool of Mechanical, Industrial and Aeronautical Engineering, University of theWitvatersrand, PO WITS 2050, Johannesburg, South Africa
bDepartment of Aeronautics and Systems Integration, FOI, The Swedish DefenseResearch Agency, SE-164 90 Stockholm, Sweden
cDepartment of Information Technology, Scientific Computing, UppsalaUniversity, SE-751 05 Uppsala, Sweden
dFaculty of Engineering Technology, University of Twente, PO Box 217, 7500 AEEnschede, The Netherlands
eCenter of Mathematics for Applications, University of Oslo P.B 1053 BlindernN-0316 Oslo, Norway
Abstract
A stable and conservative high order multi-block method for the time-dependentcompressible Navier-Stokes equations has been developed. Stability and conserva-tion are proved using summation-by-parts operators, weak interface conditions andthe energy method. This development makes it possible to exploit the efficiency ofthe high order finite difference method for non-trivial geometries. The computa-tional results corroborate the theoretical analysis.
Key words: Navier-Stokes, finite difference, high order, stability, conservation
∗ Corresponding author, Email address: [email protected] This work was done while the first two authors were visiting CTR, The Centerfor Turbulence Research at Stanford University.
Preprint submitted to Elsevier 9 September 2009

1 Introduction
The high order finite difference method in combination with summation-by-parts operators and weak boundary conditions can very efficiently and re-liably handle large problems on structured grids for reasonably smooth ge-ometries. This has been shown in a sequence of papers, see for example[12,24,3,15,16,18,26,28]. The most recent papers ([26],[28]) on this subject dis-cuss the specific problem with far-field and no-slip boundaries. In this paperwe will continue the development by treating the similar but not identicalproblem with a stable and accurate coupling of blocks.
In [4],[23],[29] the conventional (non-overlapping meshes) multi-block method-ology is presented and discussed, but no theoretical analysis is performed.The stability of the non-overlapping multi-block techniques is analyzed in[5],[14],[6] using the one-dimensional normal mode analysis (see [10]). Theoverlapping grid technique has been studied in a similar manner using normalmode analysis in [2], [21], [22]. The analysis in the papers above is essentiallyone-dimensional (although a periodic behavior in the tangential direction canbe included).
Due to the limitations of the normal mode analysis for multi-dimensionalproblems we will use the energy method in combination with summation-by-parts operators and weak boundary conditions as our theoretical tools. Thetechnology in the two papers [26],[28] together with the interface treatment inthis paper will conclude the development of a high order accurate and trulystable multi-block finite difference method for the Navier-Stokes equations.
In the next phase of this development we will use the coupling techniquedeveloped in this paper and combine the high order finite difference methodwith the finite volume method in combination with unstructured grids whichcan more readily handle complex geometries. That development is ongoing, seefor example [17],[7] and [19]. The development in this paper is the theoreticalfoundation for that work.
The main challenge for multi-block methods is to control the possible instabil-ity at the block interfaces between sub-domains. We will focus on that problemand for the first time prove stability and conservation of a high order accuratemulti-block finite difference method applied to the Navier-Stokes equations.The analysis will be done for the linear constant coefficient Navier-Stokesequations. The theoretical development is validated in numerical computa-tions where the full non-linear Navier-Stokes equations are used.
The rest of the paper is organized as follows. In the next section we present thesymmetric constant coefficient form of the Navier-Stokes equations followedby a short discussion of well-posedness in section 3. The formulation of the
2

numerical method on a single domain is considered in section 4. The couplingprocedure is the topic of section 5 and the numerical experiments are presentedin section 6. Finally, conclusions are drawn in section 7.
2 The Navier-Stokes equations
The frozen coefficient time-dependent compressible Navier-Stokes equationsin two-dimensions in non-conservative form are given by, see [1]
ut + Aux +Buy = Cuxx +Duxy + Euxy, (1)
where u = [ρ, u1, u2, p]T and A, B, C, D, and E are coefficient matrices. ρ is the
density, u1 and u2 are the velocities and p is the pressure. The coefficients arefrozen at the constant state u = [ρ, u1, u2, p]
T . To apply the energy methodwe must symmetrize (1). The procedure developed in [1] and [20] yield asymmetric form of (1),
ut + (A1u)x + (A2u)y = ε[(B11ux +B12uy)x + (B21ux +B22uy)y
], (2)
with ε = 1/Re, u = (cρ/(√γρ), u1, u2, ρT /
√γ(γ − 1))T and
A1 =
u1c√γ
0 0
c√γ
u1 0√
γ−1γc
0 0 u1 0
0√
γ−1γc 0 u1
, A2 =
u2 0 c√γ
0
0 u2 0 0
c√γ
0 u2
√γ−1γc
0 0√
γ−1γc u2
,
B11 =
0 0 0 0
0 λ+2µρ
0 0
0 0 µρ
0
0 0 0 γµPr ρ
, B12 = B21 =
0 0 0 0
0 0 λ+µ2ρ
0
0 λ+µ2ρ
0 0
0 0 0 0
, B22 =
0 0 0 0
0 µρ
0 0
0 0 λ+2µρ
0
0 0 0 γµPr ρ
.
In the vectors and matrices above we have used the temperature T , the ratioof the specific heats γ = cp/cv, the speed of sound c, the dynamic viscosityµ, the bulk viscosity λ, the kinematic viscosity ν = µ/ρ, the Prandtl numberPr = ν/α (α is the thermal diffusivity) and the Reynolds number Re =ρ∞U∞L/µ∞. The infinity subscript denotes free stream conditions and L isa characteristic length. Note again that the form of the matrices (Jacobians)
3

above are obtained for the symmetrized frozen coefficient version of the Navier-Stokes equations.
Equation (2) can be rewritten in conservative form as
ut + Fx +Gy = 0, (3)
where
F = A1u− ε(B11ux +B12uy) =F I − εF V ,
G = A2u− ε(B21ux +B22uy) =GI − εGV .(4)
F I and GI contain the inviscid terms and F V and GV the viscous terms.
3 Well-posedness of the continuous problem
To keep the algebraic complexity of the analysis as low as possible, we considerrectangular domains with cartesian coordinates. Applying the energy methodto (3) on the domain Ω ∈ [−1, 1]× [0, 1] we obtain∫∫
ΩuTutdxdy +
∫∫ΩuTFxdxdy +
∫∫ΩuTGydxdy = 0. (5)
By using the Green-Gauss theorem, equation (5) can be written as
d
dt
(‖u‖2
)=−
∫ 1
0uT(F I − 2εF V
)∣∣∣x=1
dy︸ ︷︷ ︸East
−∫ 0
1uT(F I − 2εF V
)∣∣∣x=−1
dy︸ ︷︷ ︸West
−∫ 1
−1uT(GI − 2εGV
)∣∣∣y=0
dx︸ ︷︷ ︸South
−∫ −1
1uT(GI − 2εGV
)∣∣∣y=1
dx︸ ︷︷ ︸North
− 2ε∫∫
Ω
uxuy
T B11 B12
B21 B22
︸ ︷︷ ︸
B
uxuy
dxdy. (6)
To have a bounded energy growth, the boundary terms (East, West, Northand South) must be bounded using the correct number and form of boundaryconditions. That is the topic in papers [26],[28] and it is not discussed furtherhere. The contribution from the integral term is negative semi-definite sincethe matrix B = [B11 B12;B21 B22] is positive semi-definite.
We summarize the result for the continuous problem (2)-(4) in the followingproposition.
4

Proposition 3.1 The continuous problem (2)-(4) is well posed if the bound-ary terms are limited by using the correct number of the boundary conditions.
Remark The n-dimensional Navier-Stokes equations require n boundary con-ditions at an inflow boundary and n− 1 at an outflow boundary. In this case(two-dimensions) we need four boundary conditions an inflow boundary andthree at an outflow boundary, see for example [25],[10],[20].
4 Stability on a single domain
Consider the computational domain with a Cartesian mesh of (M+1)×(N+1)points. Let the k-th element of the continuous variable u at the structured gridpoint (xi, yj) be u(i, j, k) (0 ≤ k ≤ 3). The finite difference approximation ofu(i, j, k) is collected in a global vector v such that v[4i(N + 1) + 4j + k] =u(i, j, k) (0 ≤ i ≤ M , 0 ≤ j ≤ N and 0 ≤ k ≤ 3). Let vx and vy beapproximations of ux and uy.
By using the finite difference method developed in [12,24,3,15,16,18,26,28] asemi-discrete approximation of equation (3) can be written as
vt +DxF +DyG = 0, (7)
where Dx = P−1x Qx ⊗ Iy ⊗ I4 and Dy = Ix ⊗ P−1
y Qy ⊗ I4 are first derivativeoperators in x-, and y- directions, respectively. Ix and Iy are the identitymatrices of size (M + 1)× (M + 1) and (N + 1)× (N + 1). Moreover,
F = FI − εFV , G = GI − εGV
FI = (Ix ⊗ Iy ⊗ A1)v, FV = (Ix ⊗ Iy ⊗B11)vx + (Ix ⊗ Iy ⊗B12)vy,
GI = (Ix ⊗ Iy ⊗ A2)v, GV = (Ix ⊗ Iy ⊗B21)vx + (Ix ⊗ Iy ⊗B22)vy,
and vx = Dxv,vy = Dyv. Let P = Px ⊗ Py and multiply equation (7) withvT (P ⊗ I4). (This is the discrete equivalent of multiplying (3) with vT andintegrating over the computational domain to get the energy estimate (6)).
This leads to
vT (P ⊗ I4)vt + vT (Qx ⊗ Py ⊗ I4)F + vT (Px ⊗Qy ⊗ I4)G = 0 (8)
By adding the transpose of equation (8) to itself and using the SBP relations
Qx +QTx = diag(−1, 0, . . . , 0, 1), Qy +QT
y = diag(−1, 0, . . . , 0, 1) (9)
5

we can write the result as
d
dt
(‖v‖2
P⊗I4
)= −IT + εVT. (10)
The inviscid term IT in (10) is
IT =vT (Qx ⊗ Py ⊗ I4)FI + (FI)T (QTx ⊗ Py ⊗ I4)v+
vT (Px ⊗Qy ⊗ I4)GI + (GI)T (Px ⊗QTy ⊗ I4)v (11)
= vTE(Py ⊗ I4)FIE︸ ︷︷ ︸
East
−vTW (Py ⊗ I4)FIW︸ ︷︷ ︸
West
−vTS (Px ⊗ I4)GIS︸ ︷︷ ︸
South
+ vTN(Px ⊗ I4)GIN︸ ︷︷ ︸
North
The viscous term VT in (10) can be written as
VT =vT (Qx ⊗ Py ⊗ I4)FV + (FV )T (QTx ⊗ Py ⊗ I4)v+
vT (Px ⊗Qy ⊗ I4)GV + (GV )T (Px ⊗Qy ⊗ I4)Tv
=2 vTE(Py ⊗ I4)FVE︸ ︷︷ ︸
East
−2 vTW (Py ⊗ I4)FVW︸ ︷︷ ︸
West
−2 vTS (Px ⊗ I4)GVS︸ ︷︷ ︸
South
+ 2 vTN(Px ⊗ I4)GVN︸ ︷︷ ︸
North
−2
vxvy
T P ⊗B11 P ⊗B12
P ⊗B21 P ⊗B22
vxvy
.(12)
An expanded version of equation (10) using the relations above becomes
d
dt
(‖v‖2
P⊗I4
)=− vTE(Py ⊗ I4)(FI
E − 2εFVE)︸ ︷︷ ︸
East
+ vTW (Py ⊗ I4)(FIW − 2εFV
W )︸ ︷︷ ︸West
+ vTS (Px ⊗ I4)(GIS − 2εGV
S )︸ ︷︷ ︸South
−vTN(Px ⊗ I4)(GIN − 2εGV
N)︸ ︷︷ ︸North
− 2ε
vxvy
T P ⊗B11 P ⊗B12
P ⊗B21 P ⊗B22
vxvy
. (13)
Note that for square matrices P and B11 (or B12, B21 and B22) the Kroneckerproduct P ⊗ B11 and B11 ⊗ P are even permutation similar, that is, thereexists a permutation matrix Φ such that P ⊗ B11 = ΦT (B11 ⊗ P )Φ, see [11]for details. Equation (13) can therefore be written
d
dt
(‖v‖2
P⊗I4
)= BT− 2ε
wx
wy
T B11 B12
B21 B22
⊗ Pwx
wy
(14)
6

X
Y
-1 -0.5 0 0.5 1-0.5
0
0.5
Fig. 1. A hybrid mesh of 65×65 + 33×65 grid points.
where BT collect all the boundary terms in (13) and wx = Φvx,wy = Φvy.
Exactly similar to the continuous case, a bounded energy growth in (14) re-quire boundedness in terms of given data of the boundary terms (East, West,North and South). Again, that is dealt with in the papers [26],[28] where theboundary conditions are implemented using penalty terms. The contributionfrom the quadratic form in (14) is negative semi-definite since the matrix Pis positive definite and B = [B11 B12;B21 B22] is positive semi-definite.
Exactly similar to the continuous case, we summarize the result for the semi-discrete single domain problem (7) in the following proposition.
Proposition 4.1 The semi-discrete problem (7) is stable if the boundary termsare limited by appropriate boundary procedures.
5 Stable and conservative interface conditions
We consider a computational domain consisting of two sub-domains and acommon interface at x = 0, see Figure 1. Let u and v be the unknowns in theleft and right sub-domain, respectively, and introduce the superscripts L andR to identify the left and right sub-domains.
The semi-discrete approximation of (2) on the two sub-domains with an in-terface can be written
ut +DLxF
L +DLyG
L =(ML)−1(ΣL
1
[ui − vi
]+ ΣL
2
[(FV )Li − (FV )Ri
]), (15a)
vt +DRx FR +DR
y GR =(MR)−1(ΣR
1
[vi − ui
]+ ΣR
2
[(FV )Ri − (FV )Li
]), (15b)
7

where the matrices EL, ER picks out the parts of the vectors residing at the interfacesuch that for example ui = ELu, vi = ERv. In the following, the subscript iindicates that the quantity resides on the interface. We also have the definitions:
DLx = (PLx )−1QLx ⊗ ILy ⊗ I4, DL
y = ILx ⊗ (PLy )−1QLy ⊗ I4,
DRx = (PRx )−1QRx ⊗ IRy ⊗ I4, DR
y = IRx ⊗ (PRy )−1QRy ⊗ I4,
ML = PLx ⊗ PLy ⊗ I4, MR = PRx ⊗ PRy ⊗ I4, (16)
ΣL1 = (EL)TPLy ⊗ ΣL
1 , ΣL2 = (EL)TPLy ⊗ ΣL
2 ,
ΣR1 = (ER)TPRy ⊗ ΣR
1 , ΣR2 = (ER)TPRy ⊗ ΣR
2 .
The definitions of F and G are given in section 4 above and ΣL1 ,Σ
R1 ,Σ
L2 ,Σ
R2 unknown
penalty matrices. Note that the outer boundary conditions are neglected in thisanalysis, for separate treatment of these see [26],[28].
We will determine the penalty matrices ΣL1 ,Σ
R1 ,Σ
L2 ,Σ
R2 by stability and conservation
requirements (see [3,15,16,18] for previous applications of this technique). Applyingthe energy method to (15a) and (15b) yields
d
dt
(‖u‖2ML + ‖v‖2MR
)+ 2εDiss = wT
i Mwi (17)
where wi = [ui,vi, (ux)i, (vx)i, (uy)i, (vy)i]T and
Diss =
uxuy
T PLx ⊗ PLy ⊗B11 P
Lx ⊗ PLy ⊗B12
PLx ⊗ PLy ⊗B21 PLx ⊗ PLy ⊗B22
uxuy
+
vxvy
T PRx ⊗ PRy ⊗B11 P
Rx ⊗ PRy ⊗B12
PRx ⊗ PRy ⊗B21 PRx ⊗ PRy ⊗B22
vxvy
.The matrix M in (17) determines the stability of the interface treatment. M issymmetric and the elements of M are
M11 = PLy ⊗ (−A1 + ΣL1 + (ΣL
1 )T ), M12 = PLy ⊗−ΣL1 + PRy ⊗−(ΣR
1 )T ,
M13 = PLy ⊗ (εI4 + ΣL2 )B11, M14 = PLy ⊗−ΣL
2B11,
M15 = PLy ⊗ (εI4 + ΣL2 )B12, M16 = PLy ⊗−ΣL
2B12,
M22 = PRy ⊗ (A1 + ΣR1 + (ΣR
1 )T ), M23 = PRy ⊗−ΣR2 B11,
M24 = PLy ⊗ (−εI4 + ΣR2 )B11, M25 = PLy ⊗−ΣR
2 B12,
M26 = PRy ⊗ (−εI4 + ΣR2 )B12, M33 = M34 = M35 = M36 = 0,
M44 = M45 = M46 = 0, M55 = M56 = M66 = 0.
Notice that the matrix M in its present form is indefinite.
In order to construct a symmetric semi-definite negative matrix on the right handside of equation (17) we must “borrow” interface terms from Diss on the left hand
8

side, see [3]. The term Diss can be written as
Diss =Diss+ αLpL
(ux)i
(uy)i
T PLy ⊗B11 P
Ly ⊗B12
PLy ⊗B21 PLy ⊗B22
(ux)i
(uy)i
+ βRpR
(vx)i
(vy)i
T PRy ⊗B11 P
Ry ⊗B12
PRy ⊗B21 PRy ⊗B22
(vx)i
(vy)i
where pL = (PLx )M,M , pR = (PRx )1,1 and
Diss =
uxuy
T PLx ⊗ PLy ⊗B11 PLx ⊗ PLy ⊗B12
PLx ⊗ PLy ⊗B21 PLx ⊗ PLy ⊗B22
uxuy
+
vxvy
T PRx ⊗ PRy ⊗B11 PRx ⊗ PRy ⊗B12
PRx ⊗ PRy ⊗B21 PRx ⊗ PRy ⊗B22
vxvy
.The modified norms in Diss are PLx = PLx − diag(0, .., αLpL) and PRx = PRx −diag(βRpR, 0.., 0). Note that with 0 < αL, βR ≤ 1, then PLx ≥ 0 and PRx ≥ 0 andhence Diss ≥ 0.
As a result, the modified version of equation (17) can be written as
d
dt
(‖u‖2ML + ‖v‖2MR
)+ 2εDiss = wT
i Mwi, (18)
where M plays the role of M except that the zero elements in M are replaced by
M33 = −2εαLpLPLy ⊗B11, M35 = −2εαLpLPLy ⊗B12,
M44 = −2εβRpRPRy ⊗B11, M46 = −2εβRpRPRy ⊗B12,
M55 = −2εαLpLPLy ⊗B22, M66 = −2εβRpRPRy ⊗ 2B22,
M53 = MT35, M64 = MT
46.
5.1 Conservation conditions
Before considering the stability, we investigate the conservation properties at theinterface . Let ϕ be a smooth test function with compact support, multiply equation(3) with ϕ and integrate over the spatial domain Ω ∈ [−1, 1]× [0, 1]. We obtain∫∫
ΩϕTutdxdy −
∫∫Ω
(ϕTxF + ϕTyG)dxdy = 0. (19)
The conservative form of equation (3) makes it possible to use integration-by-partsand move the differentiation on to the smooth continuous function ϕ.
9

We want to preserve this property in the discrete case. For the single domain prob-lem this is trivial since the SBP operators are constructed to do just that, seeequation (9). However, in the multi-domain case we have an interface and extracare is necessary.
With a slight abuse of notation we also let ϕ denote a smooth grid function. Notethat this means that ϕLi = ϕRi = ϕi. Multiplying equations (15a) and (15b) by(ϕTM)L and (ϕTM)R respectively and using the SBP relations (9) leads to
(ϕTM)Lut + (ϕTM)Rvt − (ϕTxMF + ϕTyMG)L − (ϕTxMF + ϕTyMG)R = IT. (20)
The ML,MR involved in (20) are defined in (16). The left-hand side of (20) corre-sponds exactly to the left-hand side of (19). As usual we have neglected the outerboundary terms.
If the interface term IT at the right-hand side of (20) vanish, we have a conservativescheme. The interface term is
IT = ϕTi[− (PLy ⊗A1)ui + (PRy ⊗A1)vi + (PLy ⊗ ΣL
1 − PRy ⊗ ΣR1 )(ui − vi)
+ (PLy ⊗ εI4)(FVi )L − (PRy ⊗ εI4)(FVi )R
+ (PLy ⊗ ΣL1 − PRy ⊗ ΣR
1 )((FVi )L − (FVi )R)].
The choice PLy = PRy and the conditions (21) below cancel the interface term IT in(20) and lead to a conservative scheme.
ΣR1 = ΣL
1 −A1, ΣR2 = ΣL
2 + εI4 (21)
Remark The conservation conditions (21) are a subset of the resulting stabilityconditions, see also [3,15,16,18] where similar conservation conditions were derived.
Remark The condition PLy = PRy implies that the same SBP operators should beused in the y-direction in both sub-domains. This restriction can be removed, andthat will be the topic in a future paper.
5.2 Stability conditions
Inserting PLy = PRy = Py and the conservation conditions (21) into (18) results in
d
dt
(‖u‖2ML + ‖v‖2MR
)+ 2εDiss = −xT (N ⊗ Py)x, (22)
10

where
x =
Φu
Ψv
Φux
Ψvx
Φuy
Ψvy
, N =
N11 −N11 N13 N14 N15 N16
−N11 N11 −N13 −N14 −N15 −N16
NT13 −NT
13 N33 0 N35 0
NT14 −NT
14 0 N44 0 N46
NT15 −NT
15 NT35 0 N55 0
NT16 −NT
16 0 NT46 0 N66
.
The permutation matrices Φ and Ψ are defined in Section 4 and
N11 = A1 − ΣL1 − (ΣL
1 )T ), N13 = −(εI4 + ΣL2 )B11, N14 = ΣL
2B11,
N15 = −(εI4 + ΣL2 )B12, N16 = ΣL
2B12. N33 = 2εαLpLB11,
N35 = 2εαLpLB12, N44 = 2εβRpRB11, N46 = 2εβRpRB12,
N55 = 2εαLpLB22, N66 = 2εβRpRB22.
A bounded energy require a positive semi-definite matrix N . To simplify the algebrawe introduce a transformation matrix S such that STS = I and
S =
1√2I4
1√2I4 0 0 0 0
0 0 I4 0 0 0
0 0 0 0 I4 0
0 0 0 I4 0 0
0 0 0 0 0 I4
1√2I4 − 1√
2I4 0 0 0 0
, N = SNST =
0 0 0 0 0 0
0 N33 N35 0 0√
2N13
0 NT35 N55 0 0
√2N15
0 0 0 N44 N46
√2N14
0 0 0 NT46 N66
√2N16
0√
2NT13
√2NT
15
√2NT
14
√2NT
16 2N11
To simplify the matrix N we introduce
α = αLpL, β = βRpR, ΣL2 = −ε∆, ΣL
1 = ΣL1I + εΣL
1V , (23)
where we choose ∆ to be diagonal. The splitting and scaling with ε in (23) aremade for convenience and means that N can be split into an inviscid part NI anda viscous part NV which simplifies the analysis. By making use of (23) we get
N =
020,20 020,4
04,20 2(A1 − ΣL1I − (ΣL
1I)T )
︸ ︷︷ ︸
NI
+ ε
04,4 04,8 04,8 04,4
08,4 2αK11 08,8
√2K13
08,4 08,8 2βK11
√2K23
04,4
√2KT
13
√2KT
23 2K33
︸ ︷︷ ︸
NV
(24)
11

where K33 = −(Σ1V + (Σ1V )T ) and
K11 =
B11 B12
B21 B22
,K13 =
(∆− I4)B11
(∆− I4)B12
,K23 =
−∆B11
−∆B12
.The subscripts on 0 in (24) indicate the size of the block.
The condition for NI in equation (24) to be positive semi-definite is
A1 − ΣL1I − (ΣL
1I)T ≥ 0. (25)
If A1 is rewritten as A1 = XTΛX = XTΛ+X + XTΛ−X = A+1 + A−1 where
Λ+ = diag(max(λi, 0)), Λ− = diag(min(λi, 0)) and λi are the eigenvalues of A1,we find that (25) is satisfied if
ΣL1I + (ΣL
1I)T ≤ A−1 . (26)
Next we turn to the more difficult analysis of the definiteness of NV . The dimensionsof NV and the matrices K11,K13,K23 and K33 are given in (24). Note that since thematrices Bij all lack the first row and column, the only non-zero part of NV thatwe need to consider for definiteness is the condensed version (we neglect the rowsand columns that consist of zeros) of the lower 3× 3 block in (24).
Let us denote the condensed version of the lower 3 × 3 block in NV with N anduse a similar notation also for the rest of the matrices. That means that we shouldconsider definiteness of
N =
2αK11 06,6
√2K13
06,6 2βK11
√2K23
√2KT
13
√2KT
23 2K33
, K33 = −(Σ + ΣT ) (27)
K11 =
B11 B12
B21 B22
, K13 =
(∆− I3)B11
(∆− I3)B12
, K23 =
−∆B11
−∆B12
. (28)
Note again that we have now replaced all 4 × 4 matrices with the corresponding3× 3 ones. We have also kept the notation ∆ and changed Σ1V to Σ.
We find that a sufficient condition for positive semi-definiteness of N is
K11 > 0 and − (Σ + ΣT ) = K33 ≥1
2αKT
13K−111 K13 +
12βKT
23K−111 K23, (29)
because we can factorize N as N = εLDLT with
D =
2αK11 0 0
0 2βK11 0
0 0 D33
, L =
I 0 0
0 I 0
1√2αKT
13K−111
1√2βKT
23K−111 I
, (30)
12

and D33 = 2K33 − 1αK
T13K
−111 K13 − 1
β KT23K
−111 K23.
The conditions (21), (25) and (29) make the matrix N positive semi-definite, whichimplies that matrix N is positive semi-definite, since for a arbitrary vector y,
yTNy = yTST NSy = yT N y ≥ 0.
The matrix K−111 can be written in block matrix form as
K−111 =
B−111 + B−1
11 B12D−1B21B
−111 −B−1
11 B12D−1
−D−1B21B−111 D−1
,with D = B22 − B21B
−111 B12. The choice ∆ = δI3 (δ ∈ R) simplifies the algebra
considerably and leads to
KT13K
−111 K
T13 = (1− δ)2B11, and KT
23K−111 K
T23 = δ2B11.
That means that the last condition in (29) together with the assumption that Σ issymmetric leads to
Σ ≤ − [β(1− δ)2 + αδ2]ε4αβ
B11. (31)
It is easy to verify that the right hand side of (31) has the least restrictive value−εB11/(4(α+ β)) when δ = β/(α+ β).
Now we have done all the necessary derivations and we can summarize the resultin the following proposition.
Proposition 5.1 If the conditions
ΣL1I ≤A−1 /2, (inviscid stability) (32a)
ΣL1V ≤− εB11/4(α+ β), (viscous stability) (32b)
ΣL2 =− εβI4/(α+ β), (viscous stability) (32c)
ΣR1 =ΣL
1 −A1, (inviscid conservation) (32d)
ΣR2 =ΣL
2 + εI4. (viscous conservation) (32e)
are satisfied, then the scheme (15)-(16) is stable and conservative.
Remark Recall that α = αLpL and β = βRpR (0 ≤ αL, βR ≤ 1) where
pL = ∆xL ·
12 2nd order SBP,1748 4th order SBP,1364943200 6th order SBP,
pR = ∆xR ·
12 2nd order SBP,1748 4th order SBP,1364943200 6th order SBP,
In order to limit the spectral radius of the problem, the values of αL and βR shouldbe chosen as large as possible, that is αL = βR = 1.
13

Remark Note again that the conservation conditions are a subset of the totalnumber of stability conditions. The conditions (32) are sufficient (but might not benecessary and unique) for a stable and conservative interface treatment.
Remark The interface treatment do not introduce stiffness for the time integra-tion procedure unless the penalty parameters in (32) are increased far beyond thenecessary stability limit.
5.3 Practical implementation of the interface treatment
We now illustrate how to practically implement the method. Consider the interfacebetween two sub-grids, as shown in figure 1. In the more standard multi-blockinterface treatment typically layers of unknowns are transfered between the sub-grids, see figure 2, and the boundaries can be treated in the same way as internalpoints. In case the grid over the interface is smooth (and the methodology is stable)
Sub−grid 2Sub−grid 1
Interface
Fig. 2. Typical standard multi-block interface treatment. Layers of unknowns, hereindicated by the dashed lines, are transfered between sub-grids.
this approach will give good results (even better than results obtained with theapproach presented in this paper). However, in practice the grid over the interfacewill never be smooth (otherwise a splitting into sub-grids would not have beennecessary) and will be clearly visible in the results. This is even true when a finitevolume formulation is used instead of a finite difference method.
In contrast, the method presented in this work does not require the exchange oflayers of unknowns; only data on the actual interface are required, see the RHSof equations (15a) and (15b). Consequently, the grid over the interface does nothave to be smooth in order to obtain high quality numerical solutions. The methodproceeds as follows, see also figure 3.
14

1 Compute for each of the sub-grids the spatial discretization as indicated by theLHS of equations (15a) and (15b). The requirements for this discretization arediscussed in section 4.
2 The solution and the viscous flux vector of the vertices located at the interfaceare made available to the adjacent sub-grid.
3 The RHS of equations (15a) and (15b) can now be computed with the knownvalues of the Σ’s, equation (32) and matrices PLx , PLy , PRx and PRy . These termsare added to the spatial residual of the boundary nodes computed in item 1.
4 The entire spatial residual is known and a time integration step can be made.
Sub−grid 2Sub−grid 1
Interface
Fig. 3. Interface treatment for the current method. Only data on the interfacebetween the two sub-grids are exchanged. Note that the nodes on the interface areduplicated. One set belongs to the left sub-grid, the other set to the right sub-grid.
The entire procedure is repeated until the desired number of time steps is taken.
6 Numerical experiments
The derivation of the stability and conservation properties as expressed in Proposi-tion 5.1 was done for the constant coefficient problem. We now verify that the resultof the linear analysis is valid for the full non-linear Navier-Stokes equations.
6.1 Verification of accuracy and stability of the new interface treatment
We consider a calculation on two sub-domains coupled at an interface, see Figure1. A stationary viscous shock problem where the middle of shock is located at the
15

interface is calculated. This problem has an analytical solution (for Prandtl numberPr = 3/4) which means that we have full control of the errors. The Mach numberin front of the shock in the reference frame of the shock is 2.0 and the angle of theshock relative to the Cartesian frame is 15. The Reynolds number Re = 50.0 isbased on the Mach number of shock. The penalty terms in (32) are chosen by theminimum required values. We integrate the solution to steady-state using the thirdorder low storage explicit time advancement scheme of Le and Moin [13].
In the hybrid scheme, the second derivative SBP operator is constructed with 2p-th(p = 1, 2, . . . ) order accuracy internal and (p−1)-th order at the boundary by usinga diagonal norm. It was proved in [27] that if the solution is point wise bounded,the accuracy of the scheme is two orders higher than the accuracy of the secondderivative approximation at the boundaries. The convergence rates for the second-,fourth-, sixth- and eighth- order schemes are thus 2, 3, 4 and 5, respectively. Sincethe errors for all variables (density, velocities and energy) are very similar, only thedensity errors are shown in our calculations. The accuracy is shown in Tables 1 andTable 2. The results are in agreement with the theory, see [8,9,27].
2nd order 4th order 6th order 8th order
Points/Block Err q Err q Err q Err q
17×17 −1.29 − −1.47 − −1.14 − − −
33×33 −1.89 1.99 −2.24 2.56 −1.90 2.52 −1.89 −
65×65 −2.55 2.18 −3.14 3.00 −2.92 3.41 −3.03 3.77
129×129 −3.18 2.11 −4.12 3.24 −4.01 3.59 −4.39 4.53
257×257 −3.80 2.03 −5.06 3.15 −5.11 3.66 −5.90 5.01
Table 1The convergence rates of density on two uniform sub-domains.
Points 2nd order 4th order 6th order 8th order
(left)+(right) Err q Err q Err q Err q
33×33+17×33 −1.43 − − − −1.30 − −1.39 −
65×65+33×65 −2.02 1.94 −2.35 2.59 −2.06 2.52 −2.04 −
129×129+65×129 −2.65 2.09 −3.23 2.91 −3.02 3.21 −3.14 3.68
257×257+129×257 −3.26 2.05 −4.13 2.98 −4.09 3.53 −4.48 4.43
513×513+257×513 −3.88 2.05 −5.02 2.98 −5.22 3.76 −5.92 4.80
Table 2The convergence rates of density on two non-uniform subdomains.
In the next calculation we consider the solution computed on the mesh in Figure1. Figure 4(a) shows the density isolines using the 4th order discretization. The
16

X
Y
-1 -0.5 0 0.5 1-0.5
0
0.5
rho
2.55
2.40
2.25
2.10
1.95
1.80
1.65
1.50
1.35
1.20
1.05
(a) The whole computational domain
X
rho
-1 -0.5 0 0.5 11
1.25
1.5
1.75
2
2.25
2.5
2.75
(b) A cut at y = 0
Fig. 4. Density isolines for a 4th order calculation. 65×65 grid points are used inboth sub domains.
corresponding cut at y = 0 can be found in Figure 4(b). The distribution of densityclose to the interface x = 0 is very smooth, which illustrates that the interface doesnot introduce large reflections and oscillations.
The density errors at y = 0 with SBP operators of different order are shown inFigures 5 and 6. Figure 5 shows the result for two uniform meshes, while in Figure6 the right block is twice as coarse in the x-direction as the left block. Figures 5(a)and 6(a) show that the higher order schemes have rather large errors, comparable tothe lower order schemes close to the interface x = 0 for the coarse mesh. However,when the mesh is refined, (129 × 129 and 65 × 129, respectively) the higher orderschemes outperform the lower order schemes (see Figures 5(b) and 6(b)). Tables 1-2and Figures 5-6 illustrate that the interface treatment is stable and accurate for allorders of accuracy.
17

X
rhoErr
or
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1.000
.002
.004
.006
.008
.010
.012
.014
2nd Order4th Order6th Order8th Order
(a) 65×65 points/block
X
rhoErr
or
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1.0000
.0005
.0010
.0015
.0020
.0025
2nd Order4th Order6th Order8th Order
(b) 129×129 points/block
Fig. 5. The errors in density at y = 0 with SBP operators of different orders.
X
rhoErr
or
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1.000
.010
.020
.030
.040
.050
.060
.070
.080
.090
2nd Order4th Order6th Order8th Order
(a) 65×65 + 33×65
X
rhoErr
or
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1.000
.005
.010
.015
.020
2nd Order4th Order6th Order8th Order
(b) 129×129 + 65×129 points/block
Fig. 6. The errors in density at y = 0 with SBP operators of different orders.
18

X
Y
-1 -0.5 0 0.5 1-0.5
0
0.5
rho2.75
2.50
2.25
2.00
1.75
1.50
1.25
1.00
0.75
0.50
0.25
(a) The density
X
Y
-1 -0.5 0 0.5 1-0.5
0
0.5
rhoError
1.40E+00
1.25E+00
1.10E+00
9.50E-01
8.00E-01
6.50E-01
5.00E-01
3.50E-01
2.00E-01
5.00E-02
(b) The error in density
Fig. 7. A 4th order calculation without the necessary viscous penalty terms.
To further illustrate the necessity of having correct penalty terms we neglect theviscous penalty term completely. This leads to a complete failure for all schemes(blow up in a couple of time steps), see Figure 7.
6.2 Two applications using the new interface treatment
We start by demonstrating the multi-block method on a moving shock problem.The unsteady computation has been carried out on a uniform grid of 65×65 in eachblock in combination with the the 4th order accurate SBP operator. All penaltyparameters have the same values as for the previous steady case. The shock movesat Mach=0.15 under 45 degrees. Snapshots of the solution between t = 0.0 andt = 8.0 are shown in Figure 8. The shape of the shock through the interface x = 0
19
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 4.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 8.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 10.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 2.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 6.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.42.652.552.452.352.252.152.051.951.851.751.651.551.451.351.251.151.05
t = 0.0
Density snapshots of the moving viscous shock problem
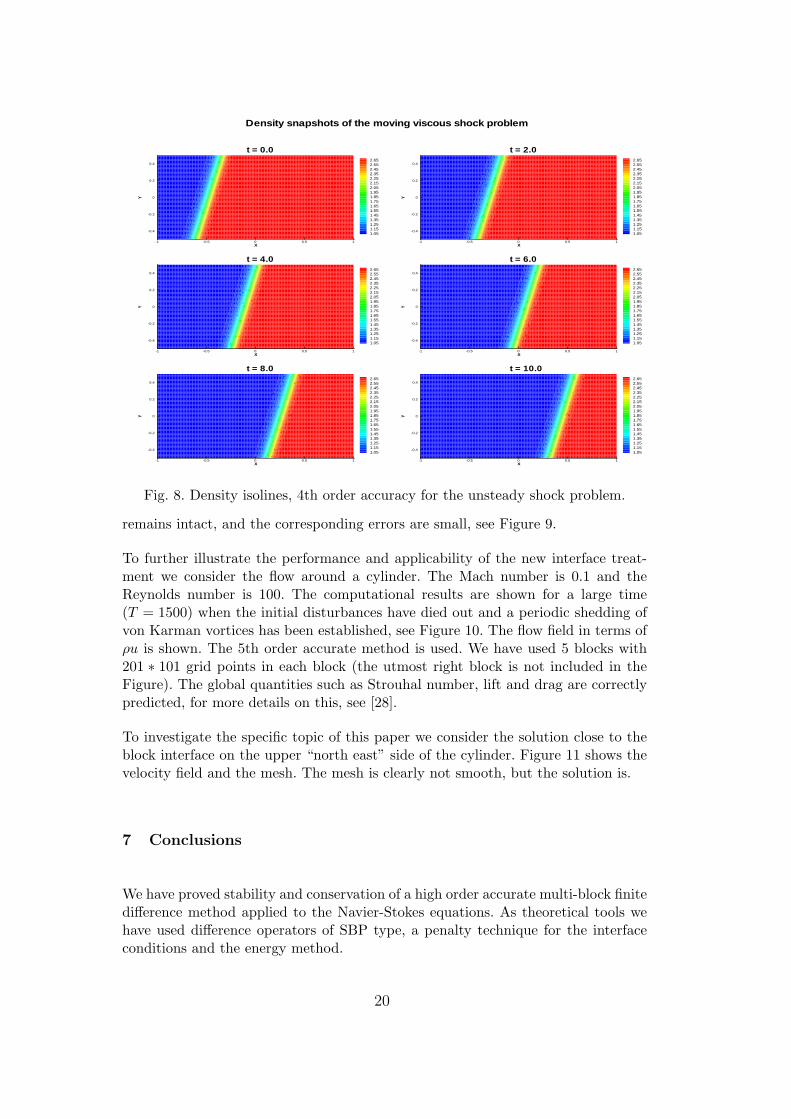
Fig. 8. Density isolines, 4th order accuracy for the unsteady shock problem.
remains intact, and the corresponding errors are small, see Figure 9.
To further illustrate the performance and applicability of the new interface treat-ment we consider the flow around a cylinder. The Mach number is 0.1 and theReynolds number is 100. The computational results are shown for a large time(T = 1500) when the initial disturbances have died out and a periodic shedding ofvon Karman vortices has been established, see Figure 10. The flow field in terms ofρu is shown. The 5th order accurate method is used. We have used 5 blocks with201 ∗ 101 grid points in each block (the utmost right block is not included in theFigure). The global quantities such as Strouhal number, lift and drag are correctlypredicted, for more details on this, see [28].
To investigate the specific topic of this paper we consider the solution close to theblock interface on the upper “north east” side of the cylinder. Figure 11 shows thevelocity field and the mesh. The mesh is clearly not smooth, but the solution is.
7 Conclusions
We have proved stability and conservation of a high order accurate multi-block finitedifference method applied to the Navier-Stokes equations. As theoretical tools wehave used difference operators of SBP type, a penalty technique for the interfaceconditions and the energy method.
20

X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 10.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 8.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 4.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 2.0
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 0.0
Density error snapshots of the moving viscous shock problem
X
Y
-1 -0.5 0 0.5 1
-0.4
-0.2
0
0.2
0.4
0.0010.00090.00080.00070.00060.00050.00040.00030.00020.00010
t = 6.0
Fig. 9. The error in density, 4th order accuracy for the unsteady shock problem.
Fig. 10. A global view of 5th order accurate cylinder calculation showing the shed-ding of von Karman vortices. The x-momentum ρu is shown.
21

x
y
0.7 0.75 0.8
0.7
0.75
0.8
0.1
Fig. 11. A zoom in on the velocity field and the mesh close to a block interface. Thevelocity field is continuous over the interface, the mesh is not.
The stability and conservation conditions are derived without approximations. Thisindicates that the derived conditions are sharp. That conclusion is supported bythe numerical calculations which show that instabilities occur if the conditions areviolated.
Mesh refinement studies for a steady viscous shock and computations of a movingviscous shock has been performed. We also considered the flow over a cylinder.The numerical experiments support the theoretical conclusions and show that theinterface coupling is stable and converge at the correct order.
References
[1] S. Abarbanel and D. Gottlieb. Optimal time splitting for two- and three-dimensional Navier-Stokes equations with mixed derivatives. Journal ofComputational Physics, 41:1–43, 1981.
[2] M. J. Berger. Stability of interfaces with mesh refinement. Mathematics ofComputation, 45:551–574, 1985.
[3] M.H. Carpenter, J. Nordstrom, and D. Gottlieb. A stable and conservativeinterface treatment of arbitrary spatial accuracy. Journal of ComputationalPhysics, 148:341–365, 1999.
22

[4] M. Darbandi and A. Naderi. Multiblock hybrid grid finite volume method tosolve flow in irregular geometries. Computer Methods in Applied Mechanics andEngineering, 196:321–336, 2006.
[5] C. de Nicola, G. Pinto, and R. Tognaccini. A normal mode stability analysisof multiblock algorithms for the solution of fluid-dynamics equations. AppliedNumerical Mathematics, 19:419–431, 1996.
[6] L. Ferm and P. Lotstedt. Accurate and stable grid interfaces for finite volumemethods. Applied Numerical Mathematics, 49:207–224, 2004.
[7] J. Gong and J. Nordstrom. A stable and efficient hybrid method forviscous problems in complex geometries. Journal of Computational Physics,226(2):1291–1309, 2007.
[8] B. Gustafsson. The convergence rate for difference approximation to mixedinitial boundary value problems. Mathematics of Computation, 29, 1975.
[9] B. Gustafsson. The convergence rate for difference approximation to generalmixed initial boundary value problems. SIAM Journal on Numerical Analysis,18(2):179–190, 1981.
[10] B. Gustafsson, H.-O. Kreiss, and J. Oliger. Time Dependent Problems andDifference Methods. John Wiley & Sons, Inc., 1995.
[11] R. A. Horn and C. R. Johnson. Topics in Matrix Analysis. CambridgeUniversity Press, 1991.
[12] H.-O. Kreiss and G. Scherer. Finite element and finite difference methods forhyperbolic partial differential equations, in: C. De Boor (Ed.), MathematicalAspects of Finite Elements in Partial Differential Equation. Academic Press,New York, 1974.
[13] H. Le and P. Moin. An improvement of fractional step methods for theincompressible Navier-Stokes equations. Journal of Computational Physics,92:369–379, 1991.
[14] A. Lerat and Z.N. Wu. Stable conservative multidomain treatments for implicitsolvers. Journal of Computational Physics, 123:45–64, 1995.
[15] J. Nordstrom and M. H. Carpenter. Boundary and interface conditions forhigh order finite difference methods applied to the Euler and Navier-Stokesequations. Journal of Computational Physics, 148:621–645, 1999.
[16] J. Nordstrom and M. H. Carpenter. High-order finite difference methods,multidimensional linear problems and curvilinear coordinates. Journal ofComputational Physics, 173:149–174, 2001.
[17] J. Nordstrom and J. Gong. A stable hybrid method for hyperbolic problems.Journal of Computational Physics, 212:436–453, 2006.
[18] J. Nordstrom and R. Gustafsson. High order finite difference approximationsof electromagnetic wave propagation close to material discontinuities. Journalof Scientific Computing, 18(2):215–234, 2003.
23

[19] J. Nordstrom, F. Ham, M. Shoeybi, E. van der Weide, M. Svard, K. Mattsson,G. Iaccarino, and J. Gong. A hybrid method for unsteady fluid flow. Computersand Fluids, 38:875–882, 2009.
[20] J. Nordstrom and M. Svard. Well-posed boundary conditions for the Navier-Stokes equations. SIAM Journal on Numerical Analysis, 43(3):1231–1255, 2005.
[21] F. Olsson and N. A. Petersson. Stability of interpolation on overlapping grids.Computers and Fluids, 25:583–605, 1996.
[22] E. Part-Enander and B. Sjogren. Conservative and non-conservativeinterpolation between overplapping grids for finite volume solutions ofhyperbolic problems. Computers and Fluids, 23:551–574, 1994.
[23] A. Rizzi, P. Eliasson, I. Lindblad, C. Hirsch, C. Lacour, and J. Hauser.The engineering of multiblock multi-grid software for Navier-Stokes flows onstructured meshes. Computers and Fluids, 22:341–367, 1993.
[24] B. Strand. Summation by parts for finite difference approximation for d/dx.Journal of Computational Physics, 110(1):47–67, 1994.
[25] J.C. Strickwerda. Initial boundary value problems for incompletely parabolicsystems. Commun. Pure Appl. Math., 9(3):797–822, 1977.
[26] M. Svard, M.H. Carpenter, and J. Nordstrom. A stable high-order finitedifference scheme for the compressible Navier-Stokes equations: far-fieldboundary conditions. Journal of Computational Physics, 225(1):1020–1038,2007.
[27] M. Svard and J. Nordstrom. On the order of accuracy for differenceapproximations of initial-boundary value problems. Journal of ComputationalPhysics, 218(1):333–352, 2006.
[28] M. Svard and J. Nordstrom. A stable high-order finite difference scheme forthe compressible Navier-Stokes equations: No-slip wall boundary conditions.Journal of Computational Physics, 227(10):4805–4824, 2008.
[29] E. van der Weide, G. Kalitzin, J. Schluter, and J.J. Alonso. Unsteadyturbomachinery computations using massively parallel platforms. AIAA Paper2006-421, 2006.
24
Related Documents











