Pergamon Nonlinear Analysis, Theory, Methods &Applications, Vol. 24, No. 8, pp. 1261-1279, 1995 Copyright © 1995 ElsevierScience Ltd Printed in Great Britain. All rights reserved 0362-546X/95 $9.50 + .00 0362-546X(94)00196-0 A SEMILINEAR WAVE EQUATION ASSOCIATED WITH A LINEAR DIFFERENTIAL EQUATION WITH CAUCHY DATA NGUYEN THANH LONGt and ALAIN PHAM NGOC DINH~: tDepartment of Mathematics, Polytechnic University of Ho Chi Minh City, 268 Ly Thuong Kiet, district 10, Ho Chi Minh City, Viet-Nam; and ~tCNRS-URA 1803; D6partment of Math6matiques, Universit6 d'Orl4ans BP 6759; 45067 - Orl6ans, Cedex, France (Received 10 March 1993; received in revised form 16 January 1994; received for publication 17 August 1994) Key words and phrases: Global existence, nonlinear Volterra integral equation, uniqueness of the solution, stability of the solutions, numerical results. 1. INTRODUCTION In this paper we consider the following problem. Find a pair (u, P) of functions satisfying Utt--Uxx-i-f(u,ut)=O, O<x<l,O<t<T, (1.1) ux(O, t) = e(t) (1.2) u(1, t) = 0 (1.3) u(x,O) = u0(x); ut(x,O) = Ul(X), (1.4) where u0, Ul, f are given functions satisfying conditions to be specified later, and the unknown function u(x, t) and the unknown boundary value P(t) satisfy the following Cauchy problem for ordinary differential equations P"(t)+to2p(t)=hutt(O,t), 0<t<T (1.5) P(0) =P0, P'(0) =el, (1.6) where to > 0, h _> 0, P0, Pt are given constants. In [1], An and Trieu studied a special case of the problem (1.1)-(1.6) with u 0 = u I = P0 = 0 and with f(u, u,) linear, i.e. f(u, u,) = Ku + Au, where K, A are given constants. In the latter case this problem is a mathematical model describing the shock of a rigid body and a linear viscoelastic bar resting on a rigid base. Our problem is thus a nonlinear analogue of the problem considered in [1]. In the case where f(u,u t) = lu,I ~- lu t the problem (1.1)-(1.6)governs the shock between a solid body and a linear viscoelastic bar with nonlinear elastic constraints at the side, constraints associated with a viscous frictional resistance. From (1.5) and (1.6) we represent P(t) in terms of Po, P1, to, h, utt(O,t) and then by integrating by parts, we obtain fo ' P(t) -- g(t) +hu(O,t) - k(t -s)u(O,s)ds, (1.7) 1261

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Pergamon Nonlinear Analysis, Theory, Methods & Applications, Vol. 24, No. 8, pp. 1261-1279, 1995
Copyright © 1995 Elsevier Science Ltd Printed in Great Britain. All rights reserved
0362-546X/95 $9.50 + .00
0362-546X(94)00196-0
A S E M I L I N E A R W A V E E Q U A T I O N A S S O C I A T E D W I T H A
L I N E A R D I F F E R E N T I A L E Q U A T I O N W I T H C A U C H Y D A T A
NGUYEN THANH LONGt and ALAIN PHAM NGOC DINH~:
tDepar tment of Mathematics, Polytechnic University of Ho Chi Minh City, 268 Ly Thuong Kiet, district 10, Ho Chi Minh City, Viet-Nam; and
~tCNRS-URA 1803; D6partment of Math6matiques, Universit6 d'Orl4ans BP 6759; 45067 - Orl6ans, Cedex, France
(Received 10 March 1993; received in revised form 16 January 1994; received for publication 17 August 1994)
Key words and phrases: Global existence, nonlinear Volterra integral equation, uniqueness of the solution, stability of the solutions, numerical results.
1. I N T R O D U C T I O N
In this paper we consider the following problem. Find a pair (u, P) of functions satisfying
U t t - - U x x - i - f ( u , u t ) = O , O < x < l , O < t < T , (1.1)
ux(O, t) = e ( t ) (1.2)
u(1, t) = 0 (1.3)
u(x,O) = u0(x); ut(x,O) = Ul(X), (1.4)
where u0, Ul, f are given functions satisfying conditions to be specified later, and the unknown function u(x, t) and the unknown boundary value P(t) satisfy the following Cauchy problem for ordinary differential equations
P"(t)+to2p(t)=hutt(O,t) , 0 < t < T (1.5)
P(0) =P0, P'(0) =el, (1.6)
where to > 0, h _> 0, P0, Pt are given constants. In [1], An and Trieu studied a special case of the problem (1.1)-(1.6) with u 0 = u I = P0 = 0
and with f(u, u,) linear, i.e. f(u, u,) = Ku + Au, where K, A are given constants. In the latter case this problem is a mathematical model describing the shock of a rigid body and a linear viscoelastic bar resting on a rigid base. Our problem is thus a nonlinear analogue of the problem considered in [1].
In the case where f (u ,u t) = lu,I ~- lu t the problem (1.1)-(1.6)governs the shock between a solid body and a linear viscoelastic bar with nonlinear elastic constraints at the side, constraints associated with a viscous frictional resistance.
From (1.5) and (1.6) we represent P(t) in terms of Po, P1, to, h, utt(O,t) and then by integrating by parts, we obtain
fo ' P(t) -- g(t) +hu(O,t) - k(t - s )u (O,s )ds , (1.7)
1261

1262 NNGUYEN THANH LONG and A. PHAM NGOC DINH
where
g ( t ) = (eo + huo (0)) cos tot + I ( P 1 - h u l ( O ) ) sin tot (1.8) to
k ( t ) = h to sin to t. (1.9)
By eliminating an unknown function P(t ) , we replace the boundary condition (1.2) by
~0 t ux(O, t ) - -g( t ) + h u ( O , t ) - k ( t - s ) u ( O , s ) d s . (1.10)
Then, we reduce problem (1.1)-(1.6) to (1.1)-(1.4), (1.7)-(1.9) or (1.1), (1.3), (1.4), (1.8)-(1.10). In [2], Ang and Dinh established a uniqueness and global existence for the problem (i.b.v)
(1.1), (1.3), (1.4), (1.10) with
h = O, k ( t ) - 0 (1.11)
f(u,ut)=lu,l~-lu,, 0 < a < l . (1.12)
In [3] we established results about global and local existence of solutions for problem (i.b.v) (1.1), (1.3), (1.4), (1.10) with
• k ( t ) = O, h > 0 ( g ( t ) given) (1.13)
• function f ( u , u t) H61der continuous with respect to each variable and nondecreasing with respect to u r This case contains the case (1.12) as a special case.
The aim of this paper is to prove three theorems. In theorem 1, global existence and uniqueness of a solution of the problem (1.1), (1.3), (1.4), (1.10) are proved. In theorem 2, we prove that the solution (u, P) of this problem is stable with respect to the parameter h > 0 and the functions g( t ) and k( t ) . In theorem 3, we prove that the solution of problems (1.1)-(1.6) is also stable with respect to the real parameters h > 0, to > 0, P0, Pa.
Finally, we present some numerical results.
2. U N I Q U E N E S S AND E X I S T E N C E T H E O R E M S
First, we set some notations
II = (0,1), Q r = I I × ( O , T ) , T > 0
L q = L q ( ~ ) , H 1 = Hl ( f~) ,
where H ~ is the usual Sobolev space on IL Let ( . , . ) be either the scalar product in L 2 or the dual pairing of a continuous linear
functional and an element of a function space. The notation ll'lf stands for the norm in L 2 and we denote by If'llx the norm in the Banach
space X. We call X ' the dual space of X. We denote by LP(0, T; X) , 1 < p _< oo for the Banach space of the real functions f:(0, T) ~ X
measurable, such that
(j0 I l f l lL ,¢0 , r ; x ) -- I I f ( t ) l l x e dt < ~, for 1 < p < oo

Semilinear wave equation 1263
or
We put
IlfllL®(0,T;X) = ess supllf(t)llx, 0<t<T
forp = oo.
V = {v e H l / v ( 1 ) = 0}
a(u,v) = ( Ou ,~v } f~ Ou Ov c~ x ' c~ x = c~----~ ~---~ d x .
V is a closed subspace of H 1 and on V, IIvlIH, and a¢-~, v) are two equivalent norms. We put
Ilvll, = ~ v ) .
We then have the following lemma.
LEMMA 1. The imbedding Vc_, C°(K) is compact and
Ilvllc0(~) _< Ilvllo, Vv ~ V.
The proof is straightforward and we omit the details. We make the following assumptions: (A 1) u o ~ H 1, U l E L 2 ; (A 2) h > 0 ; (A 3) g ~HI(O,T) , V T > 0 and g(0) exists; (m 4) k ~ H I ( O , T ) , V T > 0 and k(0)=0. The function f : R 2 ~ R satisfies f(0, 0)= 0 and the following conditions: (F 1) ( f ( u , v ) - f ( u f ) ) ) ' ( v - ~ ) > O , Vu, v, ~ e R ;
there are two constants a, /3~(0,1) and two functions Bl, B 2 : R + ~ R + satisfying:
(F 2) B 1 is nondecreasing; (F 3) B2(IvI)eL2(QT), Vv EL2(QT), VT> O; (F4) If(u, v)-f(u, ~)1 ~Bl(lul)lv-DI ~, (Fs) If(u,v)-f(a,v)l~B2(Ivl)lu-~l r3, We also use the notations
Vu, v,b e R ; Vu, fi, v ~ R.
3u O2u t ~ - - U t t
l ~ = l.,I t c ~ t ' = u t t egg 2 "
Then, we have the following theorem.
(2.1)
continuous and
THEOREM 1. Let (AI)-(A 4) and (F1)-(F 5) hold. Then, for every T > 0, there exists a weak solution (u, P) of problem (1.1)-(1.4) and (1.7),
such that
u ~ L = ( O , T ; V ) , ut~L°~(O,T;L2), u t (O , t )~L2(O,T) (2.2)
P ~ Hi(0, T). (2.3)
Furthermore, if /3 = 1 in (Fs), the solution is unique.

1264 NNGUYEN THANH LONG and A. PHAM NGOC DINH
Remark. This result is stronger than in [3]. Indeed, corresponding to the same problems (1.1)-(1.4) and (1.7) with k(t) = O, the following assumptions which were made in [3] are not needed here
2
0 < a < l , BI( lu l )~LI -~(Qr) , Vu~L~(O,T:V) , V T > 0 . (2.4)
B 2 is nondecreasing. (2.5)
Proof The proof consists of several steps.
Step 1. The Galerkin approximation. Consider a special orthonormal basis on V
= ~f 2 "cos(Ajx), Aj = (2j - 1) 2 , j = 1,2,. 2 "" ~ ( x ) 1 +Aj
formed by the eigenfunctions of the Laplacian --(o~2//tgX2).
Put
Um(t) = ~ Cmj(t)Wj, (2.6) j=l
where cmj(t) satisfy the following system of nonlinear differential equations
(U"m(t),Wj) + a(Um(t), Wj) + Pro(t). Wi(O) + ( f(um(t) , U'm(t)) , W i) = 0
Vj, 1 < j < m (2.7)
Pro(t) = g ( t ) +h.um(O,t) - k( t -s )um(O,s)ds (2.8)
Urn(O) = Uom = ~ amj ~ ~ U o strongly in H 1 ]=1
(2.9) U'm(O) = Ulm = ~ Bmj~ ~ Ul strongly in L 2.
j=l
For fixed T > 0, from the assumptions of the theorem, system (2.7)-(2.9) has solution (u,,(t), Pro(t)) on an interval [0, Tml- The following estimates allow one to take Tm = T for all m .
Step 2. A priori estimates. Substituting (2.8) into (2.7), then multiplying the jth equation of (2.7) by C'mj(t) and summing up with respect to j, we have
1 7S re(t) 4- (f(Um(t),U'm(t)) --f(Um(t),O) , U'm(t)) = --g(t)u'm(O,t)
-(f(Um(t),O),U'm(t)) + k(t-S)Um(O,s)ds.u'm(O,t) , (2.10)
Semilinear wave equation 1265
where
S,,(t) = IlU'm(t)[I 2 + Ilum(t)ll2o + hu2(O, t). (2.11)
Using the assumption (F 1) about the monotony with respect to the second variable and the assumption (m3) , then integrating by parts with respect to the time variable, we have
f0 t Sin(t) < Sm(O) + 2g(0)U0m(0) -- 2g(t)um(O, t) "~ 2 g'(S)Um(O, S)ds
fo' -- 2 (f(Um(S),O) , U'm(S) ) as (2.12)
fOt fO "r + 2 u'm(0, I") d~" 2k(r-S)Um(O,s)ds.
Using (2.9), (2.11) and lemma 1 we get
Ci S,,(O) + 2lg(O)Uom(O)l <_ -if-, Vm, (2.13)
where C 1 is a constant independent from m. Again using lemma 1 and the inequality
a 2 2ab < -~- + 3b 2, Va, b ~ R (2.14)
we obtain
-2g(t)Um(O, t) + 2 g'(S)Um(O, < 3g2(t) + ~Sm(t)
+ 3 Ig'(s)lads + "~ Sin(s) ds. (2.15)
Assumption (F s) implies that
If(u,,(t),O)l < n2(O)llu,,(t)ll~. (2.16)
Using the Cauchy-Schwarz inequality, we obtain in view of (2.11) and (2.16)
(I+/3)
fo fo 12 (f(u,~(s),O),um(s))dsl_2B2(O) SIn(S) ; ds. (2.17)
Note that the last integral in (2.12) gives after integrating by parts
11 = 2um(0,t) k(t -s)um(O,s)ds
- 2 um(0, r ) d r k'(r-S)Um(O,s)ds. (2.18)

1266
Hence
NNGUYEN THANH LONG and A. PHAM NGOC DINH
fot for IIl1~ 2 ~ Ik(t-s)lv~m(s)ds+2 V/~(z) d~ "
× Ik'(w-s)lf~m(S) ds =J1 +J2. (2.19)
The first term in the RHS of (2.19) is estimated by means of the inequality (2.14)
fo f0 J1 <- ½Sin(t) + 3 k2(0) dO Sm(s) ds. (2.20)
Similarly, the second term in the RHS of (2.19) is estimated by means of the Cauchy-Schwartz inequality
1 f0t f0 t f0 t J2 <: -~ Sm('r) d ' r - 3t Ik'(0)l 2 dO- Sm(S)ds. (2.21)
From (2.19) to (2.21) we obtain
lfo' II~ <_ 1Sin(t) + -~ S,.(~') dr
+ 3( fotk2(O)dO+t fotlk'(o)lZ do) fotSm(S)ds. (2.22)
It follows from (2.12), (2.13), (2.15), (2.17), (2.18) and (2.22) that
-- fot fotgm('r )(l +B )/2 dT, Sm(t) <gl( t ) +gz(t) SIn(Z) d~'+ 6B2(0) (2.23)
where
( j0 t ) gl(t) = C 1 + 9 g2(t) + Ig'(s)12ds (2.24)
Since H1(0, T) ~ C°[0, T], from the assumptions (A3), (A 4) we deduce that
Igi(t)l _< M~r i), a.e. t ~ [0, T], (i = 1,2), (2.26)
where M~r i) is a constant depending only on T. It follows, therefore, from (2.23) and (2.26) that
f'e Sin(t) < A'~(1) + - "'-r (Sm(z)) dr, O<t<Tm<r,_ _ (2.27)

Semilinear wave equation 1267
where
I ( ( S ) = M(T2)'S + 6B2(0)s 0 + ~)/2 (2.28)
Now/((s) is nondecreasing for s > 0, hence we have
Sm(t)<S(t), Vt ~ [0, T], for every T > 0 (2.29)
since S(t) is the maximal solution of the nonlinear Volterra integral equation with non- decreasing kernal [4] on an interval [0, T] given by
S(t) = M(r ~) + I((S(r)) dr. (2.30)
Now, we need an estimate on the integral JR lU'm(O, s)l 2 ds. Put
Kin(t) = ~ sinAjt
j= 1 Aj (2.31)
[ Tm ( t ) = E Wj(0) Olmj cos Ajt + fl,.j j=
(2.32) m fotSin[Aj(t_r)](Aj ~WJ ) - ¢ j2 I(Um(r),u'm(r)),
Then urn(0, t) can be rewritten as [2]
f0 ' um(O,t) = Tin(t) - g m ( t - r ) P m ( r ) d r . (2 .33)
We shall require the following lemmas.
LEMMA 2. There exist a constant C 2 > 0 and a positive continuous function D(t) independent of m such that
f0' f0' [y'm(S)12ds<C2+D(t) ]lf(Um(S), U'm(S))[12ds
Vt ~ [0, T] for any T> 0. (2.34)
The proof of lemma 2 can be found in [2].
LEMMA 3. There exist two positive constants M~r 3) and M~r 4) depending only on T such that
f0 f0' ~)Pm(r)d'2 f0 'd f''" m(°'r)'2 t d s K ' m ( s - -< ""Ta/tO) + M(T 4) S ' d r .~o
Vt~ [0, T] for any T > 0 . (2.35)
1268
Proof.
then
NNGUYEN THANH LONG and A. PHAM NGOC DINH
Integrating by parts, we have
Y0 Y0 K'm( s - r)pm(r)dr=Km(S)Pm(O ) + Km(S - r)p'm(z)d~ (2.36)
fotds i foSK'm(S - "r ) Pm( ~" ) d'r 2
fot f o t f o s fo s < 2/ '2(0) K~(s)ds + 2 ds K2m(O)dO IP'm(Z)[ 2 d~'. (2.37)
Noticing from (2.8) we have
Pro(O) = g(O) + huom(O)
fo • P'm(r) = g ' ( r ) +hu'm(O,r) - K'm(r-r)um(O,r)dr. (2.38)
Using the inequality (a + b + c) 2 < 3(a 2 + b 2 + c2), Va, b, c ~ R we have
[e'm(~')[2 d~" < 3 [g'(z)lZdz+3h e [U'm(O,z)12dz+3s [k'(O)12dO
X u~(O, r) dr. (2.39)
It follows from (2.37), (2.38) and (2.39) that
fo tdS fo g'm(S-'l')Pm(T) <6 g2(O)dO (g(O)--J-huom(O))2q-t [g ' ( ' r )12d' /"
f o t f o s t2fot fot ] +h e ds [U'm(O,r)12dz + -~ [k'(O)12 dO u~(O,r)dr . (2.40)
Noticing that for every T > 0, Kin(t)-o K(t) strongly in L2(0, T) as m ~ oo, and using the assumptions (A1)-(A 4) and the results (2.13) and (2.29) we obtain (2.35). The lemma 3 is proved completely. •
LEMMA 4. There exist two positive constants M~ 5) and Mtr 6) depending only on T such that
0 t [U 'm(0, S)[ 2 ds < Mtr 5),
f0 ' IP"(s)12 ds < A,¢~6) _ ~,1T ,
Vt ~ [0, T], for any T > 0 (2.41)
¥ t ~ [0, T], for any T > 0 . (2.42)
Proof. From (2.33) we have
U'm(O, t) = y ' m ( t ) - 2 K 'm( t - r ) P m ( r ) dr. (2.43)
From (2.43), using lemmas 2 and 3, we obtain
[u'm(0, s)l 2 ds _< 2C 2 + 2D( t ) f (Um('r) , U ' m ( ~ - ) ) l l 2 d ~ -
yotfo s + 8MCr a~+ 8Mp~ ds lu'm(0, r) l 2 dr . (2.44)
On the other hand, from the assumptions (Fz)-(F 5) we have
[]f(Um(t), U'm(t))l[ 2 <_ 2BE(llu'm(t)llo)[lu',~(t)[[2% + 2BE(O)llum(t)[lEv t3 (2.45)
since 0 < a < 1 we have [ l ' [ [L 2a _~< II-[IL 2 So, using (2.29) and (2.45) we have
[If(urn(t), U'm(t))[[ 2 < 2 B 2 ( x / ~ ) S ° ( t ) + 2B~(O)St~(t) . (2.46)
Finally, from (2.44) and (2.46) we obtain
/o /o'/o lu'm(0, s)l 2 ds < 8M(T 7) + 8M(T 4) ds [u',,(0, ~')l 2 d~'. (2.47)
Inequality (2.41) follows from Gronwall's lemma. Lemma 4 is proved completely. •
Step 3. The limiting process. From (2.8), (2.11) (2.29), (2.41), (2.42) and (2.46), we deduce that, there exists a subsequence of sequence {urn, Pro}, still denoted by {Um, P,,}, such that
Semilinear wave equation 1269
Since (2.42) is consequence of (2.29), (2.39) and (2.41), we only have to prove (2.41).
m L~(0, T; V) weak* (2.48)
m L=(0, T; L 2 ) weak* (2.49)
in L°(0, T) weak* (2.50)
m L2(0, T) weak (2.51)
m E=(0, T; L 2) weak* (2.52)
in Hi(0 , T) weak. (2.53)
By the compactness lemma of Lions ([5], p. 57), we can deduce from (2.29), (2.41), (2.48) and (2.49) that there exists a subsequence still denoted by {u m} such that
urn(0, t) ~ u(0, t) strongly in C°([0, T]) (2.54)
u m --* u strongly in LE(Qr) and a.e. (x, t) in Qr. (2.55)
U m - ' ) U
Utm ---> i~ r
u,.(O, t) --, u(O, t)
U'm(O,t) --, u ' (O,t )
/(Urn, U'm) -~ X

1270 NNGUYEN THANH LONG and A. PHAM NGOC DINH
From (2.8) and (2.54) we have
fo' Pm(t) ~ g ( t ) +hu(O,t) - k( t - s ) u ( O , s ) d s =-P(t) strongly in c°([o, rl). (2.56)
From (2.53) and (2.56) we have
P=-I 5 a.e. in [0, T]. (2.57/
Passing to the limit in (2.7) by (2.48), (2.49), (2.52) and (2.56) we have
d d - - i ( u ' , v ) + a ( u ( t ) , v ) + P ( t ) v ( O ) + ( X , v ) = O , V v ~ V . (2.58)
Since u, u m ~ C°(O, T;L2), we have Urn(O) ~ u(O) strongly in L 2. Thus
u(0) = u 0. (2.59)
On the other hand, (U 'm( t ) ,W j ) and (u'(t),Wj) belong to C°(O,T). Therefore, (u 'm(0) - u'(0), Wj) ~ 0, as m ~ oo. Hence
u'(0) = u I . (2.60)
Then, in order to prove the existence of the solution of the problems (1.1)-(1.4) and (1.7), we only have to prove that: X =f(u, u').
We shall now require the following lemma.
LEMMA 5. Let u be the solution of the following problems
u" - Uxx + X = 0 (2.61)
ux(0, t) = P ( t ) ; u(1, t) = 0 (2.62)
u(x, 0) = u0(x); u'(x, 0) = ul(x) (2.63)
u ~L~(O,T;V) and u' ~L~(O,T;L2). (2.64)
Then we have
lllu'(t)[[2 + 1 2 f0t f0 t ~llu(/)llv + P(s)u'(O, s) ds + (X(S) , u '(s)) ds
1 2 >- ½11Ulll 2 + ~llu01lv a.e. t ~ [0, T]. (2.65)
Furthermore, if u 0 = u 1 = 0 there is equality in (2.65). The proof of lemma 5 can be found in [2]. We now return to the proof of the existence of a solution of the problem (1.1-(1.4) and
(1.7). It follows from (2.7)-(2.9) that
f0 t t 1 (f(Um(S), u re(S)), U'm(S))ds = ½11Ulmll 2 + ~llu0mll2o _ ½[[U,m(t)[[2 _ _~[[Um(t)[[ 2
fo ' l , m ( - s)u re(O, s) ds. (2.66)

Semilinear wave equation 1271
By lemma 5 we have
f0 t r 1 2 l imsup (f(U,n(S),U ,.(S)), u' , .(s))ds _< ½llulll 2 + ~lluoliv - ½ l l u ' ( t ) l [ 2 - ~ [ l u ( t ) l l v l 2 m ~
(2.67)
Y0 - P(s)u'(O, s) ds <_ (X( s ) , u '(s)) ds, a.e. t ~ (0, r ) .
By using the same arguments as in [3] we can show that
x = f ( u , u ' ) a.e. in Qr-
Step 4. Uniqueness of the solution. Assume now that /3 = 1 in (Fs). Let (ul, P1), (u 2, P2) be two solutions of the problem (1.1)-(1.4) and (1.7). Then u = u 1 - u 2 and P = P1 - P2 satisfy the following problem
u" - U x x + X = O , O < x < l , O < t < T
u~(O,t) = P ( t ) ; u (1 , t ) = 0
u(x,O) = u'(x,O) = 0
X =f(u~, u'l) - f ( u 2 , u'2)
P(t) = Pl(t) - Pz(t) = hu(O, t) - k( t - s)u(O, s) ds (2.68)
u i ~ L ~ ( O , r ; v ) , u ' i~L~(O,r;L2) , u ' i ( O , t ) ~ L z ( o , r )
P i~HI(O,T) , i = 1,2.
By using lemma 5 with u o = u 1 = g ( t ) = 0, we obtain
f0 ½1[u'(t)ll 2 + gllu(t)llo + P(s)u'(O, s) ds + (X(S) , u'(s)) ds = 0. (2.69)
Put
Substituting P(t), X respect to the second variable, we have
o-(t) < 2 Ilf(ul(s),u'2(s)) - f(uz(s),u'2(s))l l ' l lu'(s)l lds
fo Yo + 2 u'(O,s)ds k ( s - r ) u ( O , r ) d r .
From assumption (F 5) it follows that
I I f ( u l ( s ) , u ' 2 ( s ) ) - - f ( u 2 ( s ) , U'z(s))ll <_ IIn2(lu'2(s)l)ll" Ilu(s)llv.
~r(t) = Ilu'(t)ll 2 + Ilu(t)llZv + hu2(O, t). (2.70)
into (2.69) and noticing that the function f is nondecreasing with
(2.71)
(2.72)

1272 NNGUYEN THANH LONG and A. PHAM NGOC DINH
Using integration by parts in the last integral of (2.71) we get
J= 2u(O,t) k ( t - r )u(O,r )dr - 2 u(O,s)ds k'(s-r)u(O,r)dr. (2.73) " 0
It follows from (2.70) and (2.73) that
S0 f0 IJ] < lo ' ( t ) + 2 k2(O)dO, o'( r ) dr
(So)' s0 + 2f[ ]k'(O)]2dO • ~r(r) dr. (2.74)
Put
T ( f0 T \ 1/2 m(s)=2llBz(lU'z(s)l)[l+4 fo kz(O)dO+4vC-T 'k'(O)12dO) "
Hence, from (2.71) to (2.75), we deduce that
[ ~(t) < m(s)o(s)ds,
i.e. o" - 0 by Gronwall's lemma. The theorem 1 is proved completely. •
(2.75)
3. STABILITY OF THESOLUTIONS
In this section, we assume that /3 = 1. By theorem 1 the problems (1.1)-(1.4) and (1.7) admits a unique solution (u, P) depending on the data h, g, k
u =u(h,g,k), P=P(h,g,k) , (3.1)
where h, g, k satisfy the assumptions (m2)-(m 4) and u0, Ul, f are fixed functions satisfying (A1), (FI)-(Fs).
Then we have the following theorem.
THEOREM 2. Let /3 = 1 and let (A1), (F1)-(Fs) hold. Then, for every T > 0, solutions of the problems (1.1)-(1.4) and (1.7) are stable with respect
to the data h, g, k, i.e.
if (h, g, k), (hi, gj, k ) satisfy the assumptions ( A 2 ) - ( A 4) such that
(hj,gj ,k)~(h,g,k)inR*+xHl(O,T)xHi(O,T)stronglyas j ~ (3.2)
then
(u j, u~, uj(O, t), ~ ) ~ (u, u ' , u(O, t), P )
inL=(O,T;V) XL=°(O,T;Lz)XC°[O,T]XC°[O,T] strongly, as j ~ ~, (3.3)
Semilinear wave equation 1273
where
R*+ = (h / h > 0}
u i = u ( h i , g j , k j ) , P j = P ( h j , g i , k j ) .
Proof. First, we note that, if the data (h, g, k) satisfy the assumptions (A2)- (A 4) and
0 < h < H o, IlgllH'¢0,r~ < Go, [Ik[lHko,r) < Ko (3.4)
then, the a priori estimates of the sequences {urn} and {Pro} in the proof of the theorem 1
satisfy
IlU'm(t)ll2+[lUm(t)ll2v<Mr, V t ~ [ O , T ] , V T > O (3.5)
f0 t lu'm(0, s)l 2 ds < M r, Vt ~ [0, T], V T > 0 (3.6)
o t l p ' m ( s ) 1 2 d s < M r , V t ~ [ O , T ] , V T > O , (3.7)
where M r is a constant depending only on T, u 0, u 1, H 0, G 0, K 0 (independent of h, g, k). Hence, the limit (u, P) in suitable function spaces of the sequence (u m, Pro) is defined by
(2.7)-(2.9) and is a solution of the problem (1.1)-(1.4) and (1.7) satisfying the a priori estimates (3.5)-(3.7).
Now, by (3.2) we can assume that, there exist constants H 0 > 0, G O > 0, K 0 > 0 such that the data (hi, gj, kj) satisfy (3.4) with (h, g, k) = (hi, gi' ki)" Then, by the above remark, we have that the solutions (u j, ~ ) of problem (1.1)-(1.4) and (1.7) corresponding to (h, g, k) = (hi, gj, k j) satisfy
Ilu~(t)ll 2 + Iluj(t)ll2o < M r , Vt ~ [0, T], VT > 0 (3.8)
f0 t lug(0, S)I 2 ds < M r , Vt ~ [0, T], V T > 0 (3.9)
£ t IP} (s)12 ds < M r, Vt ~ [0, T], V T > 0. (3.10)
Put
f~j = h i - h, ~,~ = gj - g, fcj = kj - k.
Then, vj = uj - u and Qj = Pi - P satisfy the following problem
n v j - V j x x + X j = O , O < x < l , O < t < T
Vjx(O, t) = Qj( t )
(3.11)
(3.12)
vj(1, t) = vj(x,O) = v~(x,O) = O,

1274 NNGUYEN THANH LONG and A. PHAM NGOC DINH
where
xj =f(uj,u;) - f ( u , u ' )
Oj(t) =~j ( t ) +hvj(O,t) - k ( t - s ) v j (O , s )ds (3.13)
~j(t) =~ j ( t ) +hj.uj(O,t) - ~:j(t - s )u j (O , s )ds . (3.14)
By lemma 5 with u o = u 1 = 0, X -- Xi, P = Qj we have
Ilv;(t)ll2 +vj(t)ll~ + 2 Qj(s)v;(O,s)ds + 2 ( Xj,v~)ds=O. (3.15)
Let
~ ( t ) = IIv;(t)ll 2 + Ilvy(t)ll2o + Ivy(0, t)l 2 (3.16)
then, we can prove the following inequality in a similar manner.
1 2 for fot ½ ~ ( t ) < ( E l + E 2 ) ~ ( t ) + - ~ l ~ , j ( t ) l + I~(s)12 ds + o~(s) ds
[Jo Jo ] t t t + ~ k2(s) ds + 2 ~ Ik'(s)lZds × ~ ( s ) ds (3.17)
fo' + IIB2(lu'(s)l)ll%.(s)ds for all /1 >0 , E2 > 0 and Vt ~ [0, T]
choosing E1 +E2 < 1/2. Noting that Hi(0, T) c__, C°[0, T], we have from (3.17) that
(1) ^ 2 f t ~ ( t ) < C r Ilgjlltt,~O,T) + m ( s ) ~ ( s ) ds, (3.18)
" 0
where C~ 1) is a constant depending only on T and
1 [ 1 2 ] re(s) = 21 ( E1 + E2 ) 1 -q- E--~llkllL2~o r ) + 2fTIIk'llL2(0,r) + IIBz(lu'(s)l)ll • (3.19)
By Gronwall's lemma, we obtain from (3.18) that (2) ^ 2 ~ ( t ) < C r ]lgjllnl~o.z), V ~ [0, T]. (3.20)
On the other hand, from (3.13) we obtain
IQi(t)l -< I~(/)1 + h. ~/-~j(t) + IIklIL2~0,T) (S) ds. (3.21)
We again use the embedding Ha(0, T) ~ C°[0, T]. Then, it follows from (3.20) and (3.21) that
IIQ~llco~0, T)-< C~3)ll~jllw~o,T). (3.22) As a final step, we prove
!im II~jll~0,7-) = 0. (3.23)

Semilinear wave equation 1275
Indeed, from (3.14) and combined with (3.9), we deduce the following inequality
/,-,(4) [ ~2 - 2 ] II~tllHl(0,r~ --< "~T ["t + Ilgtllm~0.r~ + Ilktl121(0,r~_. (3.24)
The proof of theorem 2 is complete. •
The following theorem is the consequence of theorem 2.
THEOREM 3. Let /3 = 1 and let (A1), (F1)-(F s) hold. Then, for every T > 0, the solutions of the problems (1.1)-(1.6) are stable with respect to
the real parameters h > 0, to > 0, P0, P1, i.e. if (h, to, Po, P1), (ht, tot' Pot, Pit) ~ R2 x R* x R x R such that
(hi, %, Poj,Plj) --, (h, to, Po, PJ) in e 4 (3.25)
then
(uj, u~, uj(O, t), Pj) --. (u ,u ' , u(O, t), P) (3.26)
in L~(0, T; V) × L~(0, T; L 2) × C°[0, T] × C°[0, T] strongly as j ---, ~, where (u, P) (resp. (ut, Pj) is the solution of the problems (1.1)-(1.6) corresponding to (h, to, P0, P1) (resp. (hi, tot' Poj, PU)).
Proof. Concerning (1.8) and (1.9), we put
g(t) = g ( t ; h; to, P0, Pl) = (Po - huo(O)) cos to t + (1 / to ) (P 1 - hul(O)) sin to t
k( t ) = k(t; h, to) = hto sin tot.
From (3.25) it follows that
gJ = g(ht ' tot' Pot' PIt ) ~ g in H1(0, T) strongly
k t = k(h t, %) ~ k in HI(O,T) strongly.
Hence, the proof of theorem 3 is complete. •
4. N U M E R I C A L R E S U L T S
Consider the problem
Utt -- UXX q - f ( u , Ut) = F(x , t), (x, t) ~ (0, 1) × (0, T)
fo u~(O, t) = ¼u(O,t) +g( t ) - sin(t - s ) u ( O , s ) d s
u(1 , t ) = 0
u(x ,0 ) =0 , u , ( x , O ) = c o s ( 2 x ) ,
where
(4.1)
(4.2)
(4.3)
g(t) = sin t. (3 _ cos t)
f ( u , u t) = [u,[ 1/2 sign (ut).
To solve the problem (4.1)-(4.3) numerically, we consider the nonlinear differential system for
1276 N N G U Y E N T H A N H LONG and A. PHAM NGOC DINH
the u n k n o w n s Uk(t) = U(Xk, t), Vk(t) = (du) / (d t ) (x k, t) with
x k = k h , h = 1 / N
du k dt = v k ' k = 0 , 1 . . . . . N - 1
dv ° 2 1 + 2u I 2 g ( t ) A t . ~ fii d--'T = h2 u° + h ~ - h + 2--/)- i=1
- f ( U o , v o) + F(Xo, t)
dvk uk_ 1 2 Uk+l f ( U k , U k ) + F ( x k , t ) ' d--T = h 2 hTUk + h---- ~ -
dvN-1 UN-_____~Z 2 - - f (uN_I ,VN_ 1) + F ( X N _ 1 t ) d----T- = h 2 h 2 U N - 1
k = 1 , 2 . . . . , N - 2
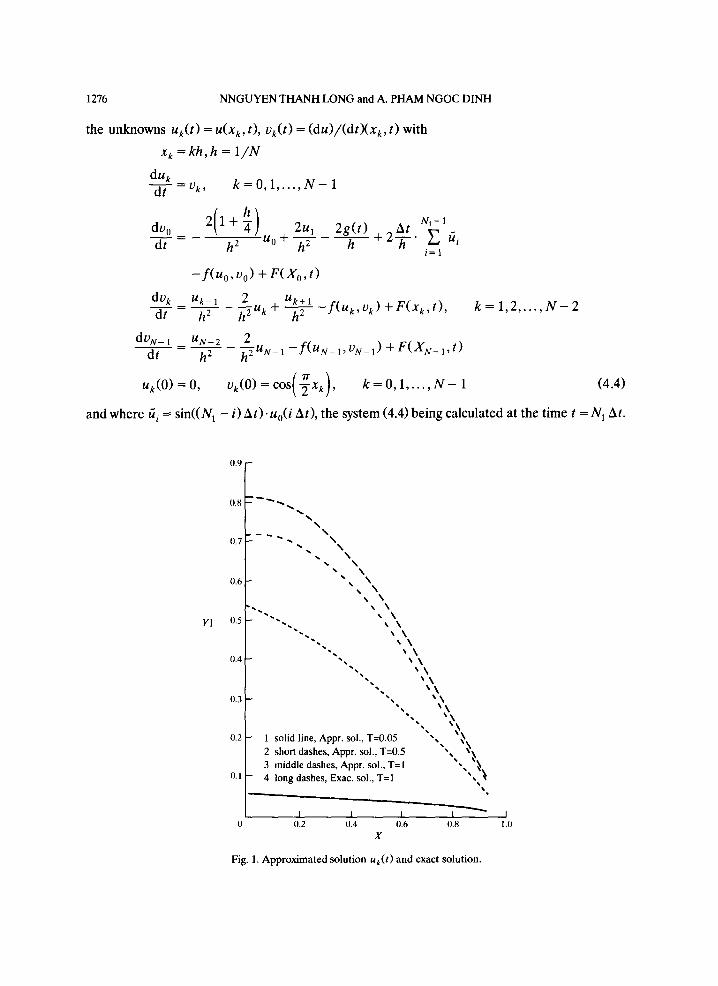
uk(0) = 0, vk(0) = cos ~ -x k , k = 0, 1 . . . . . N - 1 (4 .4)
and where fii = sin((N1 - i) At ) . Uo(i At), the system (4.4) being calculated at the t ime t = N 1 At.
0.9
0.8
(1.7
0.6
Y1 o.5
(1.4
0.3
0.2
O.l
,% \
• \ • \
• \ \
x \
x \ x \
x \ s \ " " " " " " - . x\x \
x \
1 solid line, Appr. sol., T=0.05 " ' " , ~ . k 2 short dashes, Appr. sol., T=0.5 - x~ 3 middle dashes, Appr. sol., T=I , , 4 long dashes, Exac. sol., T=I " • ~
I I I [ (1.2 0.4 0.6 0.8
X
Fig. 1. Approximated solution uk(t) and exact solution.
I 1 . 0
S e m i l i n e a r wave equation 1277
To solve the nonlinear differential system (4.4), we use the scheme generated by the nonlinear term
du(~ ") dt =v(k")' k = 0 , 1 , . . . , N - 1
[ h i dv (") 211 + ~-] u(0,) 2u~ ") 2 g ( t )
dt h 2 + h ~ h
U(n) k+ dvk (n) U(kn-)l 2 u(kn ) ~ -
d t h 2 h 2 + h 2
d,,(") U~)I ~N- 1
dt h z
u~") (o) = o,
following linear recursive
N 1 - 1
At fi}.) _ - - + 2 - h - " ]~ -f(u(o " l ) ,v(o"-O)+f(Xo,t ) i=1
f(u(k,- 1), V(k n - 1)) + F()Ck, t),
2 u(,, ) _f(u(~S~), o(n_ll)) + F ( X N 1,t) h 2 N-1
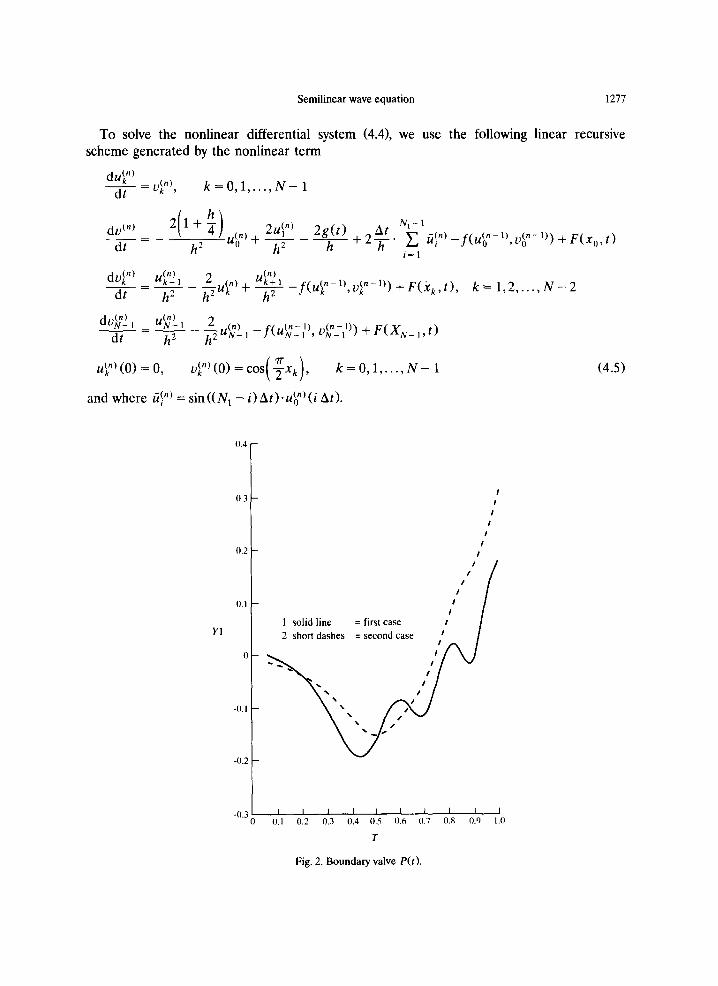
v(k ") (0) = cos -~x k , k = 0, 1 . . . . . N - 1
and where fi~") = sin ((Na - i) At). u(0 ") (i At).
k = l , 2 . . . . . N - 2
(4.5)
0.4
YI
0.3
0,2
0.1
0
-ILl
-0.2
-0.3
I I I
I I I I
-- I IIIII /
1 solid line = first case t / 2 short dashes = second case / /
I . I I I I I I I I I 0.1 1).2 0 .3 0 . 4 0 .5 0 .6 0 .7 0 .8 0 .9 1.0
T
Fig. 2. Boundary valve P(t).
1278 NNGUYEN THANH LONG and A. PHAM NGOC DINH
0.0887 ~ /
U °°594
0.0300[ I I .933
0.483 ""
T 0.050
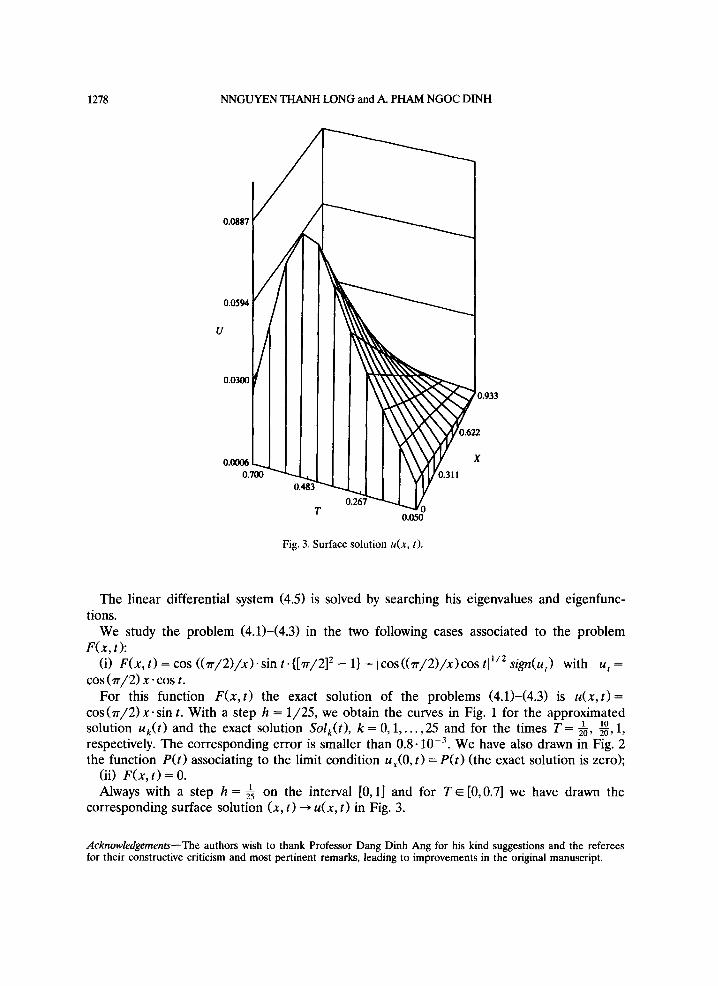
Fig. 3. Surface solution u(x, t),
The linear differential system (4.5) is solved by searching his eigenvalues and eigenfunc- tions.
We study the problem (4.1)-(4.3) in the two following cases associated to the problem F(x , / ) :
(i) F(x , t) = cos ( (~r /2) /x) . sin t. {[zr/2] 2 - 1} + [cos ( ( z r /2 ) /x ) cos t l 1/2 sign(u t) with u t = cos (7r/2) x. cos t.
For this function F ( x , t ) the exact solution of the problems (4.1)-(4.3) is u ( x , t ) = cos(~- /2)x .s in t. With a step h = 1/25, we obtain the curves in Fig. 1 for the approximated solution uk(t) and the exact solution Solk(t), k = 0, 1 . . . . . 25 and for the times T = 1 10 ~ , ~ , 1, respectively. The corresponding error is smaller than 0.8-10 -3. We have also drawn in Fig. 2 the function P(t ) associating to the limit condition ux(O, t) = P( t ) (the exact solution is zero);
(ii) F(x , t) = O. 1 Always with a step h = ~ on the interval [0, 1] and for T ~ [0,0.7] we have drawn the
corresponding surface solution (x, t) ~ u(x, t) in Fig. 3.
Acknowledgements--The authors wish to thank Professor Dang Dinh Ang for his kind suggestions and the referees for their constructive criticism and most pertinent remarks, leading to improvements in the original manuscript.
Semilinear wave equation 1279
R E F E R E N C E S
1. NGUYEN THUC AN & NGUYEN DINH TRIEU, Shock between absolutely solid body and elastic bar with the elastic viscous frictional resistance at the side, J. Mech. NCSR Vietnam Tom XIII(2),1-7 (1991).
2. DANG DINH ANG & PHAM NGOC DINH A., Mixed problem for some semilinear wave equation with a nonhomogeneous condition, Nonlinear Analysis 12, 581-592 (1988).
3. NGUYEN THANH LONG & PHAM NGOC DINH A., On the quasilinear wave equation: utt - Au + f (u , u t) = 0 associated with a mixed nonhomogeneous condition, Nonlinear Analysis 19, 613-623 (1992).
4. LAKSHMIKANTHAM V. & LEELA S., Differential and Integral Inequalities, Vol. 1. Academic Press, New York (1969).
5. LIONS J.-L., Quelques m~thodes de r~solution des problbmes aux lirnites nonlin(aires. Dunod-Gauthier-Villars, Paris (1969).
Related Documents

![Cauchy biorthogonal polynomialsmath.usask.ca/~szmigiel/BGS1JAT.pdfPeakons for the Degasperis–Procesi equation. In the early 1990’s, Camassa and Holm [13] introduced the (CH) equation](https://static.cupdf.com/doc/110x72/5f8191a3b65bbd7e95588b7e/cauchy-biorthogonal-szmigielbgs1jatpdf-peakons-for-the-degasperisaprocesi-equation.jpg)









