A Scalable Active Framework for Region Annotation in 3D Shape Collections Supplemental material Li Yi 1 Vladimir G. Kim 1,2 Duygu Ceylan 2 I-Chao Shen 3 Mengyan Yan 1 Hao Su 1 Cewu Lu 1 Qixing Huang 4,5 Alla Sheffer 3 Leonidas Guibas 1 1 Stanford University 2 Adobe Research 3 University of British Columbia 4 TTI Chicago 5 UT Austin This document provides a list of supplemental materials that ac- company this paper. • Labeling vs segmentation - We demonstrate performance of our method on segmentation benchmark relative to existing alternatives. • Exploring ShapeNetCore - We demonstrate examples of leveraging our part labels for exploring collections of shapes (see exploration.mp4 file and Section 2). • Optimality of Verification Set - We prove optimality of our verification set selection procedure in Section 3 of this docu- ment. • User Interfaces Video - We submit a video demonstrating key features of annotation and verification user interfaces (see interface.mp4 file). • ShapeNetCore Analysis - We provide the full set of analysis results for each category of ShapeNetCore showing number of verified models vs human time (Figure 4), and FMF vs fraction of data that has been verified (Figure 5). 1 Labeling vs segmentation Although the focus of our work is labeling, not segmentation, we found that our simple method for generating segmentation from the labels gives reasonable boundaries. We evaluate our method on PSB benchmark [Chen et al. 2009] using leave-one-out setup pro- posed in Kalogerakis et al. [2010] and ELM-OPT [Xie et al. 2014]. We tested our method on 7 categories of rigid objects excluding ar- ticulated shapes such as human, since our method is not designed for those. One could use intrinsic mapping algorithms to extend our method to non-rigidly deforming shapes. We report the results in Table 1. Training Kalo ELM- OPT Ours Cup 9.8 9.9 10.3 10.8 Airplane 7.4 7.9 8.9 8.6 Chair 5.2 5.4 7.1 5.9 Table 5.9 6.2 5.9 7.5 Mech 8.5 10.0 15.9 14.8 Bearing 6.8 9.7 15.4 9.6 Vase 10.5 16.0 15.6 20.9 Table 1: This table shows the quality of the segmentations our method produces by comparing the rand index scores on some cat- egories of PSB achieved by our method and the prior segmentation algorithms Kalo (Kalogerakis et al.) and ELM-OPT (Xie et al.). Lower rand index scores indicate better performance and are high- lighted in bold. In the paper, we compare our method with supervised labeling ap- proaches based on an F1 measurement. Also we evaluate different design choices of our pipeline based on F1 measurement. For a bet- ter understanding of the labeling quality of these experiments, we Figure 1: This comparison corresponds to the one shown in Figure 12 of the paper, but with precision and recall as evaluation metrics. also provide the precision and recall for the final labeling results in Table 2 and 3 correspondingly. In addition, we use precision and re- call as evaluation metrics and show the comparison with supervised labeling approaches in Figure 1. Notice unlike traditional retrieval tasks, our experiment does not involve in any parameters influenc- ing the tradeoff between precision and recall, so we show how the average precision and recall change under different training data percentages. Precision/Recall Wu et al. [2014] Kalogerakis et al. [2010] Ours Lamp 0.823/0.786 0.873/0.801 0.907/0.827 Chair 0.824/0.818 0.924/0.905 0.935/0.922 Table 2: This table gives the average per part precision and recall corresponding to the comparison conducted in Figure 12 of the pa- per. The numbers reported here are generated when the training data percentage is 5%. Precision/Recall Chair-400 Vase-300 with all component 0.950/0.953 0.909/0.889 no active selection 0.928/0.946 0.873/0.857 no verification step 0.889/0.896 0.825/0.830 no ensemble learning 0.917/0.933 0.867/0.883 no correspondence term 0.899/0.915 0.821/0.815 no feature-based term 0.913/0.927 0.859/0.878 no learning of weights 0.940/0.948 0.887/0.877 no smoothness term 0.949/0.951 0.902/0.886 Table 3: This table gives the average per part labeling precision and recall corresponding to the experiment conducted in Figure 13 of the paper. Different variants of our method were tested, each without some feature. The numbers reported here correspond to the end point of each curve in Figure 13 of the paper. 2 Exploring ShapeNetCore We can leverage the obtained annotations to explore and gain in- sights about the data in ShapeNetCore. Instead of considering only

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Scalable Active Framework for Region Annotation in 3D Shape CollectionsSupplemental material
Li Yi1 Vladimir G. Kim1,2 Duygu Ceylan2 I-Chao Shen3 Mengyan Yan1
Hao Su1 Cewu Lu1 Qixing Huang4,5 Alla Sheffer3 Leonidas Guibas1
1Stanford University 2Adobe Research 3University of British Columbia 4TTI Chicago 5UT Austin
This document provides a list of supplemental materials that ac-company this paper.
• Labeling vs segmentation - We demonstrate performance ofour method on segmentation benchmark relative to existingalternatives.
• Exploring ShapeNetCore - We demonstrate examples ofleveraging our part labels for exploring collections of shapes(see exploration.mp4 file and Section 2).
• Optimality of Verification Set - We prove optimality of ourverification set selection procedure in Section 3 of this docu-ment.
• User Interfaces Video - We submit a video demonstratingkey features of annotation and verification user interfaces (seeinterface.mp4 file).
• ShapeNetCore Analysis - We provide the full set of analysisresults for each category of ShapeNetCore showing numberof verified models vs human time (Figure 4), and FMF vsfraction of data that has been verified (Figure 5).
1 Labeling vs segmentation
Although the focus of our work is labeling, not segmentation, wefound that our simple method for generating segmentation from thelabels gives reasonable boundaries. We evaluate our method onPSB benchmark [Chen et al. 2009] using leave-one-out setup pro-posed in Kalogerakis et al. [2010] and ELM-OPT [Xie et al. 2014].We tested our method on 7 categories of rigid objects excluding ar-ticulated shapes such as human, since our method is not designedfor those. One could use intrinsic mapping algorithms to extend ourmethod to non-rigidly deforming shapes. We report the results inTable 1.
Training Kalo ELM-OPT
Ours
Cup 9.8 9.9 10.3 10.8Airplane 7.4 7.9 8.9 8.6Chair 5.2 5.4 7.1 5.9Table 5.9 6.2 5.9 7.5Mech 8.5 10.0 15.9 14.8Bearing 6.8 9.7 15.4 9.6Vase 10.5 16.0 15.6 20.9
Table 1: This table shows the quality of the segmentations ourmethod produces by comparing the rand index scores on some cat-egories of PSB achieved by our method and the prior segmentationalgorithms Kalo (Kalogerakis et al.) and ELM-OPT (Xie et al.).Lower rand index scores indicate better performance and are high-lighted in bold.
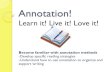
In the paper, we compare our method with supervised labeling ap-proaches based on an F1 measurement. Also we evaluate differentdesign choices of our pipeline based on F1 measurement. For a bet-ter understanding of the labeling quality of these experiments, we
Figure 1: This comparison corresponds to the one shown in Figure12 of the paper, but with precision and recall as evaluation metrics.
also provide the precision and recall for the final labeling results inTable 2 and 3 correspondingly. In addition, we use precision and re-call as evaluation metrics and show the comparison with supervisedlabeling approaches in Figure 1. Notice unlike traditional retrievaltasks, our experiment does not involve in any parameters influenc-ing the tradeoff between precision and recall, so we show how theaverage precision and recall change under different training datapercentages.
Precision/Recall Wu et al.[2014]
Kalogerakiset al. [2010]
Ours
Lamp 0.823/0.786 0.873/0.801 0.907/0.827Chair 0.824/0.818 0.924/0.905 0.935/0.922
Table 2: This table gives the average per part precision and recallcorresponding to the comparison conducted in Figure 12 of the pa-per. The numbers reported here are generated when the trainingdata percentage is 5%.
Precision/Recall Chair-400 Vase-300with all component 0.950/0.953 0.909/0.889no active selection 0.928/0.946 0.873/0.857no verification step 0.889/0.896 0.825/0.830no ensemble learning 0.917/0.933 0.867/0.883no correspondence term 0.899/0.915 0.821/0.815no feature-based term 0.913/0.927 0.859/0.878no learning of weights 0.940/0.948 0.887/0.877no smoothness term 0.949/0.951 0.902/0.886
Table 3: This table gives the average per part labeling precisionand recall corresponding to the experiment conducted in Figure 13of the paper. Different variants of our method were tested, eachwithout some feature. The numbers reported here correspond to theend point of each curve in Figure 13 of the paper.
2 Exploring ShapeNetCore
We can leverage the obtained annotations to explore and gain in-sights about the data in ShapeNetCore. Instead of considering only

Chair Backs Chair Legs
Figure 2: We demonstrate that our annotations can facilitate ex-ploration of large collections of 3D models. We show embeddingsof chairs based on the shape of their backs and legs (see video foran interactive example).
User Query Retrieved Models
+
(a)
(b)
(c)
Figure 3: Part annotations can facilitate shape retrieval. In thisexample for ShapeNetCore chairs, we show models retrieved basedonly on the shape of the base (a), the shape of the back (b), and bysearching for chairs that combine both of these criteria (c).
global shape similarities, understanding salient regions enables usto organize data by comparing features in specific regions only. Forexample, we can embed the models based on their part-to-part sim-ilarity as shown in Figure 2 (where part similarity is computed withlightfield descriptors). Note how this quickly allows the user to seedifferent regions due to variations in a particular part. We also en-able faceted search in the spirit of Kim et al. [2013] allowing usersto select parts of interest and search for shapes that have the desiredarrangement of parts (see Figure 3 and video).
3 Optimality of verification set
We demonstrate optimality of our method for selecting the ver-ification set V m
k (see Section 4 of our paper). Recall that atthis stage our method selected annotation set Am
k , and it willgreedily add models to Vm
k = {vmk } based on annotation con-fidences Cm
ver until the utility function EmU =
Nmgood
Tm stops in-creasing. The input to our algorithm is sorted confidence values:1 � Cm
ver[k] � Cmver[k]... � Cm
ver[k] � 0 (we assume that sort-ing does not change shape indexing since it does not affect ourderivations), we want to determine vmk 2 {0, 1} so that E(Vm
) =
Nm�1good +
PNk=1 vm
k Cmver [k]
Tm�1+PN
k=1 vmk (⌧ident+(1�Cm
ver [k])⌧click)is maximized. Notice that
terms that depend on annotation set A are absorbed into Tm�1 andcan be kept constant at this stage without affecting our derivation.
The optimality of our greedy approach is guaranteed by two obser-vations. First, given a constant number of models to be verified n(i.e.,
Pk v
mk = n), the optimal values are vmk = 1 8k n and
0 everywhere else since it minimizes the denominator and maxi-mizes the numerator. Thus, our algorithm is optimal if the numberof models to be verified is fixed to n. Let us denote this optimalenergy for n models by:
f(n) = max
V mk s.t.
Pk V m
k =nEm
U (V mk )
=
Nm�1good +
Pnk=1 C
mver[k]
Tm�1+ n⌧ident + n⌧click �
Pnk=1 C
mver[k]⌧click
(1)
We denote numerator in the equation above by fnum and denomina-tor fdenom. We now prove that our utility function is monotonicallydecreasing after we greedily pick optimal n: f(n + 1) f(n) )f(n+ i+ 1) f(n+ i) 8i > 0.
Suppose f(n+ 1) f(n) is true, then this is equivalent to:
fnum(n)+Cmver [n+1]
fdenom(n)+⌧ident+⌧click�Cmver [n+1]⌧click
fnum(n)fdenom(n)
, Cmver [n+1]
⌧ident+⌧click�Cmver [n+1]⌧click
fnum(n)+Cmver [n+1]
fdenom(n)+⌧ident+⌧click�Cmver [n+1]⌧click
(2)
by utilizing a simple algebraic equality: a+cb+d a
b , cd a+c
b+d
(note that all our terms are positive). Also, since Cmver[n + 2]
Cmver[n+ 1]:
Cmver[n+ 2]
⌧ident + ⌧click � Cmver[n+ 2]⌧click
Cmver[n+ 1]
⌧ident + ⌧click � Cmver[n+ 1]⌧click
(3)
Now combining Equations 2 and 3 yields:
Cmver [n+2]
⌧ident+⌧click�Cmver [n+2]⌧click
fnum(n)+Cmver [n+1]
fdenom(n)+⌧ident+⌧click�Cmver [n+1]⌧click
(4)
By definition:
, Cmver [n+2]
⌧ident+⌧click�Cmver [n+2]⌧click
fnum(n+1)fdenom(n+1) (5)
and applying cd a
b , a+cb+d a
b :
, fnum(n+1)+Cmver [n+2]
fdenom(n+1)+⌧ident+⌧click�Cmver [n+2]⌧click
fnum(n+1)fdenom(n+1) (6)
Or equivalently, f(n+ 2) f(n+ 1).Thus, by induction f(n+ i+ 1) f(n+ i) for i > 0. ⇤
References
CHEN, X., GOLOVINSKIY, A., AND FUNKHOUSER, T. 2009.A benchmark for 3d mesh segmentation. In ACM SIGGRAPH,SIGGRAPH ’09, 73:1–73:12.
KALOGERAKIS, E., HERTZMANN, A., AND SINGH, K. 2010.Learning 3D mesh segmentation and labeling. In ACM SIG-GRAPH, 102:1–102:12.
WU, Z., SHOU, R., WANG, Y., AND LIU, X. 2014. Interactiveshape co-segmentation via label propagation. CAD/Graphics 38,2, 248–254.
XIE, Z., XU, K., LIU, L., AND XIONG, Y. 2014. 3d shape seg-mentation and labeling via extreme learning machine. SGP.

Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
4
6
8
10
12
14
16
18
20
22
24Airplane
bodywingenginetail
Labeling Ratio0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
FMF
7
8
9
10
11
12
13
14Bag
handlebody
Labeling Ratio0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
FMF
5
6
7
8
9
10
11Cap
peakpanel
Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
5
10
15
20
25
30Car
roofwheelhood
Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
5
10
15
20
25
30Chair
backlegseatarm
Labeling Ratio0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
FMF
4
5
6
7
8
9
10
11
12
13
14Earphone
earphoneheadband
Labeling Ratio0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
4
6
8
10
12
14
16
18
20
22
24Guitar
bodyheadneck
Labeling Ratio0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
4
6
8
10
12
14
16
18
20Knife
bladehandle
Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
6
8
10
12
14
16
18
20
22
24Lamp
basecanopylampshade
Labeling Ratio0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
15
16
17
18
19
20
21
22
23
24Laptop
keyboard
Labeling Ratio0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
2
4
6
8
10
12
14
16
18
20
22Motorbike
wheelseatgas-tankhandlelight
Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
4
4.5
5
5.5
6
6.5
7
7.5
8
8.5Mug
handle
Labeling Ratio0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
2
4
6
8
10
12
14
16
18
20Pistol
barrelhandletrigger-and-guard
Labeling Ratio0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
2
4
6
8
10
12
14Rocket
bodyfinnose
Labeling Ratio0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
8
10
12
14
16
18
20Skateboard
wheeldeck
Labeling Ratio0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FMF
6
8
10
12
14
16
18
20
22Table
legtop
Figure 4: These plots depict how FMF relates to fraction of labeled data for different labels in different categories of ShapeNetCore. See ourpaper (Section 8) for more details.

time (sec) #10 40 0.5 1 1.5 2 2.5
N (#
of m
odel
s)
0
500
1000
1500
2000
2500
3000
3500
4000Airplane
bodywingenginetailnaive labeling
time (sec)0 50 100 150 200 250 300 350
N (#
of m
odel
s)
0
10
20
30
40
50
60
70
80Bag
handlebodynaive labeling
time (sec)0 50 100 150 200 250 300 350
N (#
of m
odel
s)
0
10
20
30
40
50
60Cap
peakpanelnaive labeling
time (sec) #10 40 0.5 1 1.5 2 2.5 3 3.5
N (#
of m
odel
s)
0
1000
2000
3000
4000
5000
6000
7000
8000Car
roofwheelhoodnaive labeling
time (sec) #10 40 0.5 1 1.5 2 2.5 3
N (#
of m
odel
s)
0
1000
2000
3000
4000
5000
6000
7000Chair
backlegseatarmnaive labeling
time (sec)0 100 200 300 400 500 600
N (#
of m
odel
s)
0
10
20
30
40
50
60
70
80Earphone
earphoneheadbandnaive labeling
time (sec)0 1000 2000 3000 4000 5000
N (#
of m
odel
s)
0
100
200
300
400
500
600
700
800Guitar
bodyheadnecknaive labeling
time (sec)0 500 1000 1500 2000 2500 3000
N (#
of m
odel
s)
0
50
100
150
200
250
300
350
400
450Knife
bladehandlenaive labeling
time (sec)0 2000 4000 6000 8000 10000
N (#
of m
odel
s)
0
500
1000
1500
2000
2500Lamp
basecanopylampshadenaive labeling
time (sec)0 100 200 300 400 500 600 700 800 900
N (#
of m
odel
s)
0
50
100
150
200
250
300
350
400
450Laptop
keyboardnaive labeling
time (sec)0 500 1000 1500 2000 2500 3000
N (#
of m
odel
s)
0
50
100
150
200
250
300
350Motorbike
wheelseatgas-tankhandlelightnaive labeling
time (sec)0 500 1000 1500
N (#
of m
odel
s)
0
50
100
150
200
250Mug
handlenaive labeling
time (sec)0 500 1000 1500 2000 2500 3000
N (#
of m
odel
s)
0
50
100
150
200
250
300Pistol
barrelhandletrigger-and-guardnaive labeling
time (sec)0 100 200 300 400 500 600 700
N (#
of m
odel
s)
0
10
20
30
40
50
60
70
80
90Rocket
bodyfinnosenaive labeling
time (sec)0 100 200 300 400 500 600
N (#
of m
odel
s)
0
20
40
60
80
100
120
140
160Skateboard
wheeldecknaive labeling
time (sec) #10 40 0.5 1 1.5 2 2.5 3 3.5
N (#
of m
odel
s)
0
1000
2000
3000
4000
5000
6000
7000
8000
9000Table
legtopnaive labeling
Figure 5: These plots depict how number of positively-verified models relates to total human work time for different labels in differentcategories of ShapeNetCore. See our paper (Section 8) for more details.
Related Documents