A Note on the Proportional Partitioning of Line Segments, Triangles and Tetrahedra by Frank J. Attanucci Scottsdale Community College Department of Mathematics [email protected] ABSTRACT: In the first part of this paper I solve the following problem: Where can one place a point G inside or on a triangle so that line segments from G to each of the vertices divide the triangle into three sub triangles whose areas A1, A2 and A3, 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
A Note on the Proportional Partitioning
of
Line Segments, Triangles and Tetrahedra
by
Frank J. Attanucci
Scottsdale Community College
Department of Mathematics
ABSTRACT: In the first part of this paper I solve the following
problem: Where can one place a point G inside or on a triangle so
that line segments from G to each of the vertices divide the
triangle into three sub triangles whose areas A1, A2 and A3,
1
respectively, satisfy the proportion: where the
are non-negative constants with positive sum? I then state
and prove an analogous result for tetrahedra. Surprised by the
structural similarity of the results (and preserving my order of
discovery) I “go back” and prove an analogous theorem for line
segments to see if the same pattern appears. I finish with a
theorem concerning the centroid of n! points. Along the way,
everything is made more intriguing by allowing the to be
parameterized functions.
It is generally known that, if line segments are drawn from the
centroid of any triangle to each of its three vertices, then the
three sub triangles so formed all have equal area. This fact
suggested to my mind the following problem:
Where can one place a point G inside or on a triangle so that
line segments from G to each of the vertices divide the
triangle into sub triangles whose areas A1, A2 and A3,
respectively, satisfy the proportion: where
the are non-negative constants with positive sum?
After identifying the notational conventions that will be used in
this paper, I formally state (and prove) a theorem which provides
the answer to this problem (Theorem 1). I then state and prove
an analogous result (Theorem 2) for tetrahedra, answering the
question:
Where can one place a point G inside or on a tetrahedron so
that line segments from G to each of the vertices divide the
2

tetrahedron into four subtetrahedra whose volumes V1, V2, V3
and V4, respectively, satisfy the proportion:
where the are non-negative
constants with positive sum?
Amazed by the structural similarities of my findings in Theorems
1 and 2, I go back to verify that the same pattern holds for line
segments (Theorem 0). Extrapolating from these results, I state
and prove a final theorem (Theorem 3) dealing with the centroid
of n! points.
A Note on Notation
For points P1, P2, P3 and G, I will use boldface to denote vectors:
and where O is the origin. Also,
I will denote the cross product by: the dot product by:
and the scalar triple product by: . Finally, I
will, without comment, make use of properties of these products
(which can be found in any book on vector calculus) as the need
arises. My decision to take a vector approach was motivated by a
desire to obtain results that would be (Cartesian) coordinate
free. It is highly unlikely that the connections that exist
between my results—those I have seen (and any I have yet to see)—
could have revealed themselves had I decided otherwise.
Partitioning a triangle into three sub triangles
3

Theorem 1: Let be any three non-collinear points (the
vertices of the triangle ) and let and
Then, for any given nonnegative constants ,
having positive sum one can find a point G inside or on the
triangle such that the areas A1, A2 and A3 of the sub
triangles and , respectively, satisfy the
proportion: Moreover, the number of such
points G for which this is so is given by the number of distinct
permutations of the elements in Finally, the centroid
of these 6 (or 3 or 1) points is the same as the centroid of the
original triangle.
Proof: The figure below will be of help.
P3
A2 c
A1
G
G* b
P1 P2
A3
G
4
O
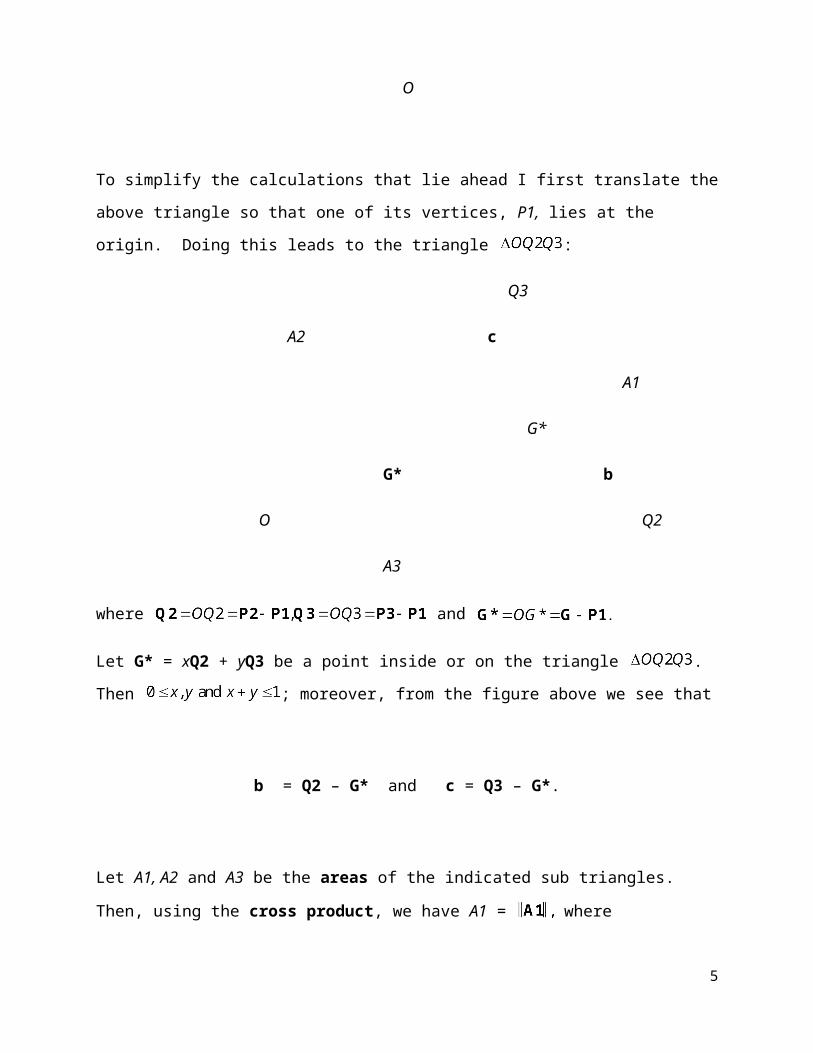
To simplify the calculations that lie ahead I first translate the
above triangle so that one of its vertices, P1, lies at the
origin. Doing this leads to the triangle :
Q3
A2 c
A1
G*
G* b
O Q2
A3
where and
Let G* = xQ2 + yQ3 be a point inside or on the triangle .
Then ; moreover, from the figure above we see that
b = Q2 – G* and c = Q3 – G*.
Let A1, A2 and A3 be the areas of the indicated sub triangles.
Then, using the cross product, we have A1 = where
5

A1
i.e., A1 ,
(1)
A2
6

(2)
and
A3
i.e., A3 .
(3)
7

Therefore, from (1), (2) and (3), if we want ,
we must solve the linear system:
. (4)
The unique solution to (4) is:
Therefore, we have
(5)
However, since G* = G – P1, Q2 = P2 – P1 and Q3 = P3 – P1,
equation (5) becomes
G
or, finally,
8

G
(6)
By considering all distinguishable permutations of the elements
of we see that the proportions in: is
just one of the (up to) six possible:
(7)
each leading to a different location for G. In fact, the number
N of locations of G is given by the following cases:
Case I: are different. In this case, we have
different locations for G; from (6) and (7) they are
given (in 2 groups of three) by:
9
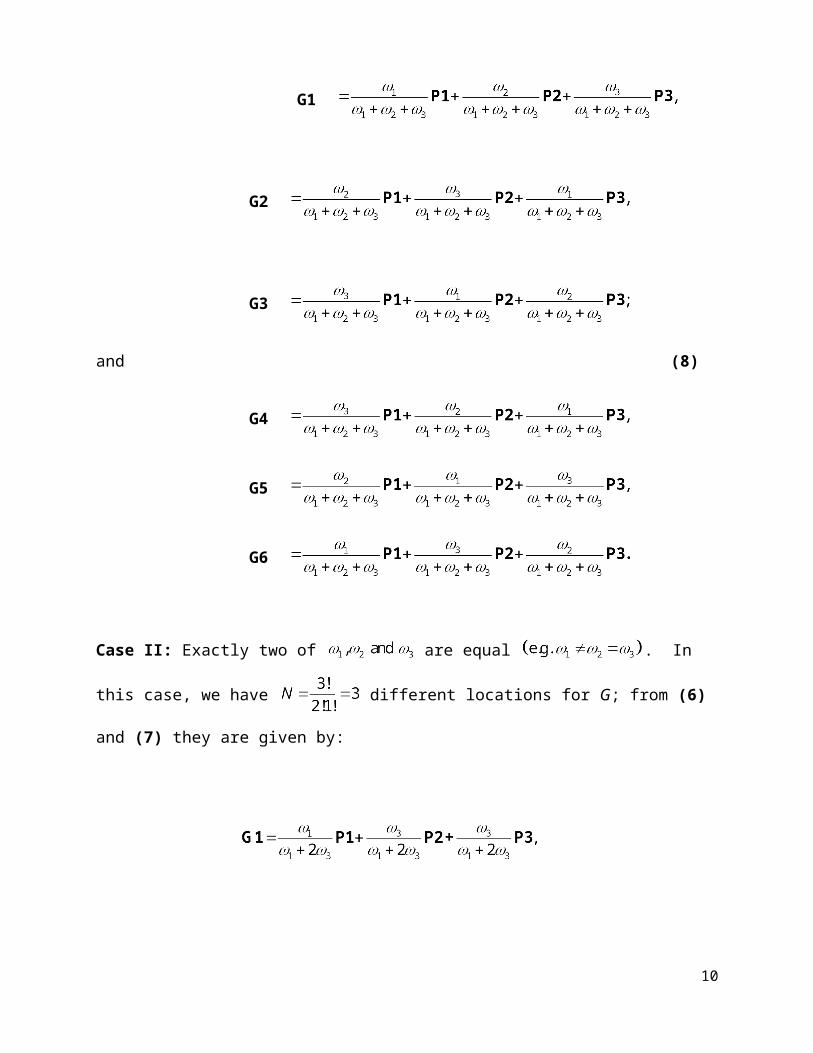
G1
G2
G3
and (8)
G4
G5
G6
Case II: Exactly two of are equal . In
this case, we have different locations for G; from (6)
and (7) they are given by:
10

(9)
and
Case III: In this case, we have only possible
location for G, namely:
Moreover, in Case I, where the six Gi’s are given in (8), we see
that their centroid H is given by
H
11

i.e., H , which coincides with the
centroid of the triangle.
Since the same is also true in Cases II and III, this completes
the proof of Theorem 1.
The following figures (showing all six ways of partitioning a
triangle ) illustrate the result.
12
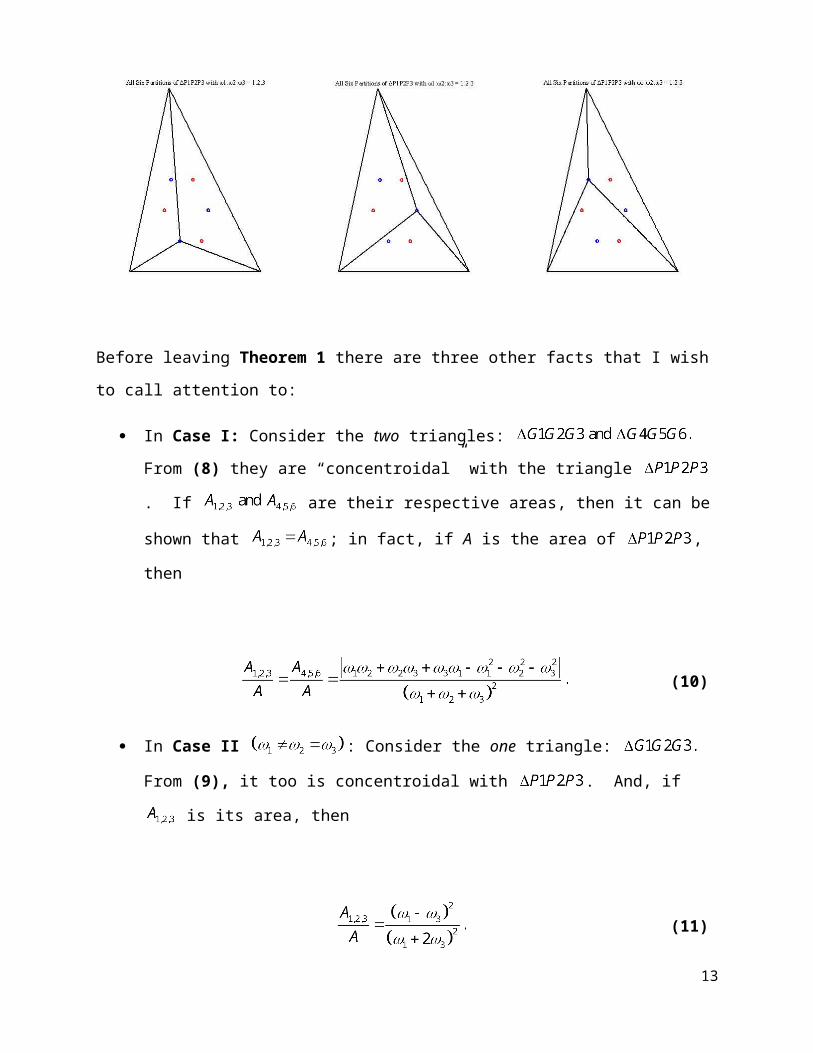
Before leaving Theorem 1 there are three other facts that I wish
to call attention to:
In Case I: Consider the two triangles:
From (8) they are “concentroidal” with the triangle
. If are their respective areas, then it can be
shown that ; in fact, if A is the area of ,
then
(10)
In Case II : Consider the one triangle:
From (9), it too is concentroidal with . And, if
is its area, then
(11)
13

NOTE: To obtain (10) and (11), I made use of:
Finally, we note that if we take to be non-negative
parameterized functions that do
not simultaneously vanish on their domain, then the trajectories
of the 6 (or 3 or 1) points can create fascinating patterns—a
family of curves whose union has H as a centroid (and a point of
symmetry if is equilateral)! In the three examples
below on the interval
Remark: for all in the above example; in the next
two this is not the case.
14

Partitioning a tetrahedron into four subtetrahedra
15
Theorem 2: Let be any four non-coplanar points (the
vertices of the tetrahedron ) and let
and Then, for any given
nonnegative constants and having positive sum one can
find a point G inside or on the tetrahedron such that
the volumes V1, V2, V3 and V4 of the subtetrahedra
respectively, satisfy the
proportion: Moreover, the number of such
points G for which this is so is given by the number of distinct
permutations of the elements in Finally, the
centroid of these 24 (or 12 or 6 or 4 or 1) points is the same as
the centroid of the original tetrahedron.
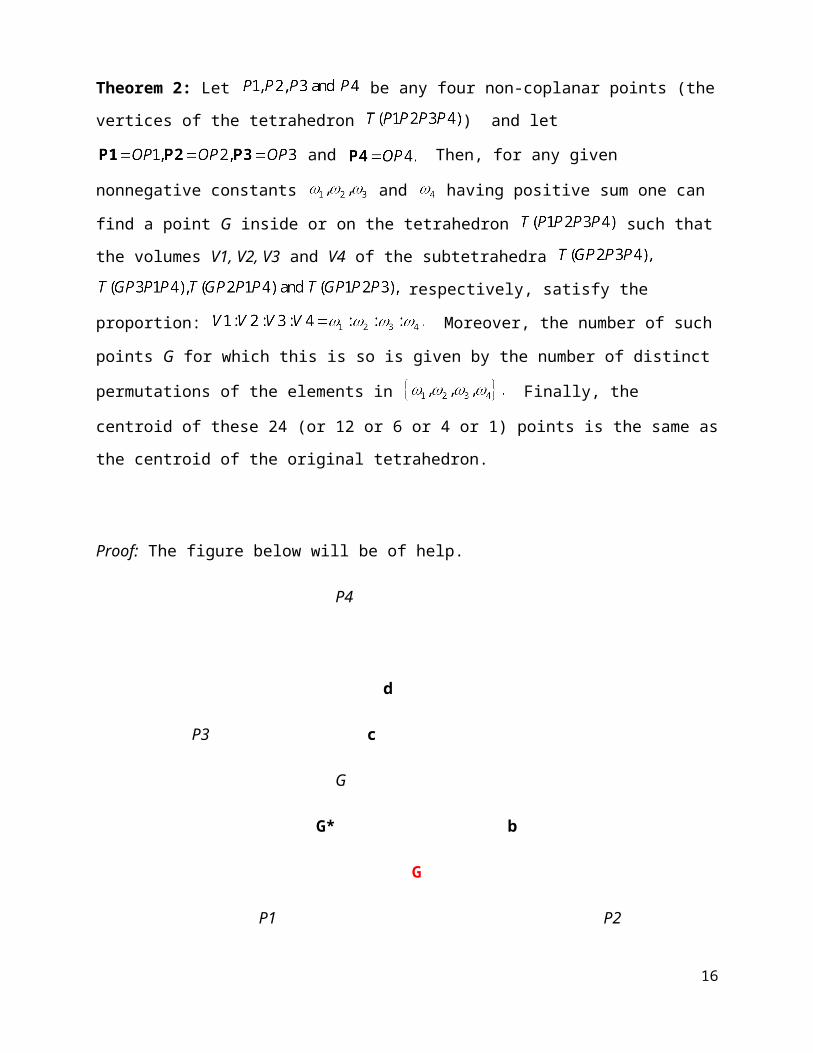
Proof: The figure below will be of help.
P4
d
P3 c
G
G* b
G
P1 P2
16
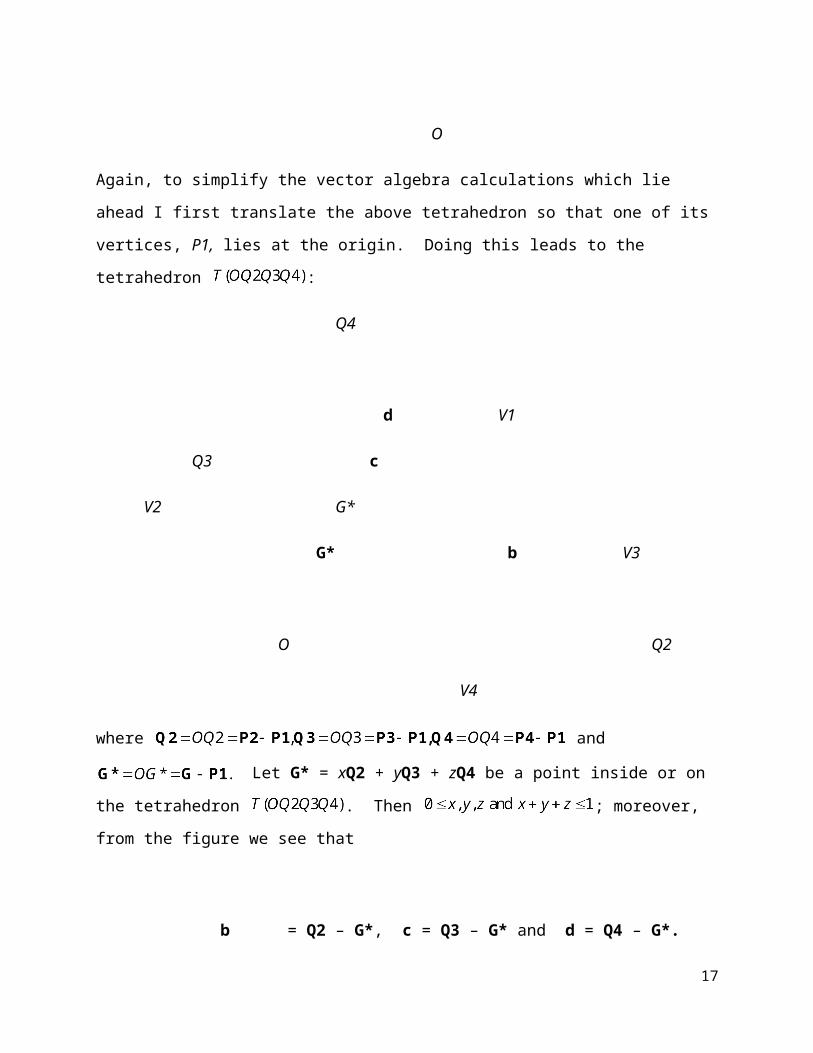
O
Again, to simplify the vector algebra calculations which lie
ahead I first translate the above tetrahedron so that one of its
vertices, P1, lies at the origin. Doing this leads to the
tetrahedron :
Q4
d V1
Q3 c
V2 G*
G* b V3
O Q2
V4
where and
Let G* = xQ2 + yQ3 + zQ4 be a point inside or on
the tetrahedron . Then ; moreover,
from the figure we see that
b = Q2 – G*, c = Q3 – G* and d = Q4 – G*.
17

Let V1, V2, V3 and V4 be the volumes of the indicated
subtetrahedra. Then, where from the scalar triple
product,
V1*
18

i.e., V1*
(12)
In entirely similar ways (and after much vector algebra), one can
show that
V2*
(13)
19

V3*
(14)
and
V4*
(15)
NOTE: If V is the volume of the tetrahedron T(OQ2Q3Q4) [or
], then using the triple scalar product
From (12), (13), (14) and (15), in order to have
, we must solve the linear system:
20
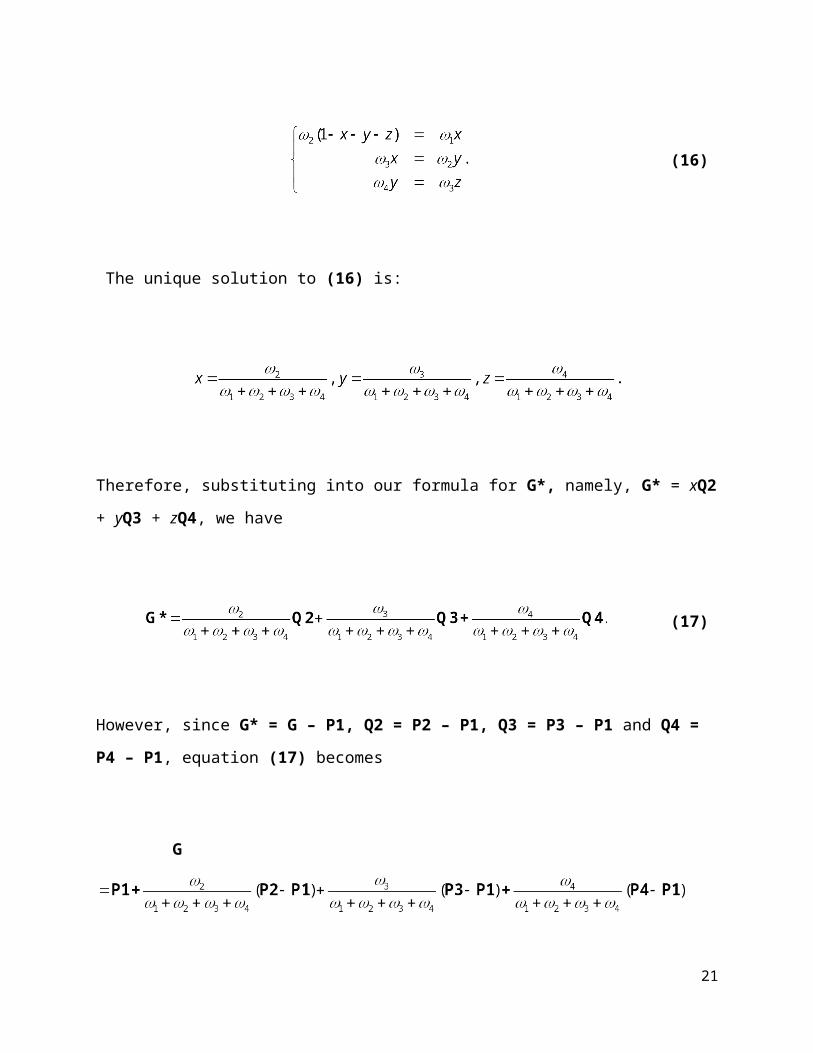
(16)
The unique solution to (16) is:
Therefore, substituting into our formula for G*, namely, G* = xQ2
+ yQ3 + zQ4, we have
(17)
However, since G* = G – P1, Q2 = P2 – P1, Q3 = P3 – P1 and Q4 =
P4 – P1, equation (17) becomes
G
21
or, finally,
G
(18)
Again, if we consider all distinguishable permutations of the
elements of we see that the proportions in:
is just one of the (up to) twenty-four
possible:
22
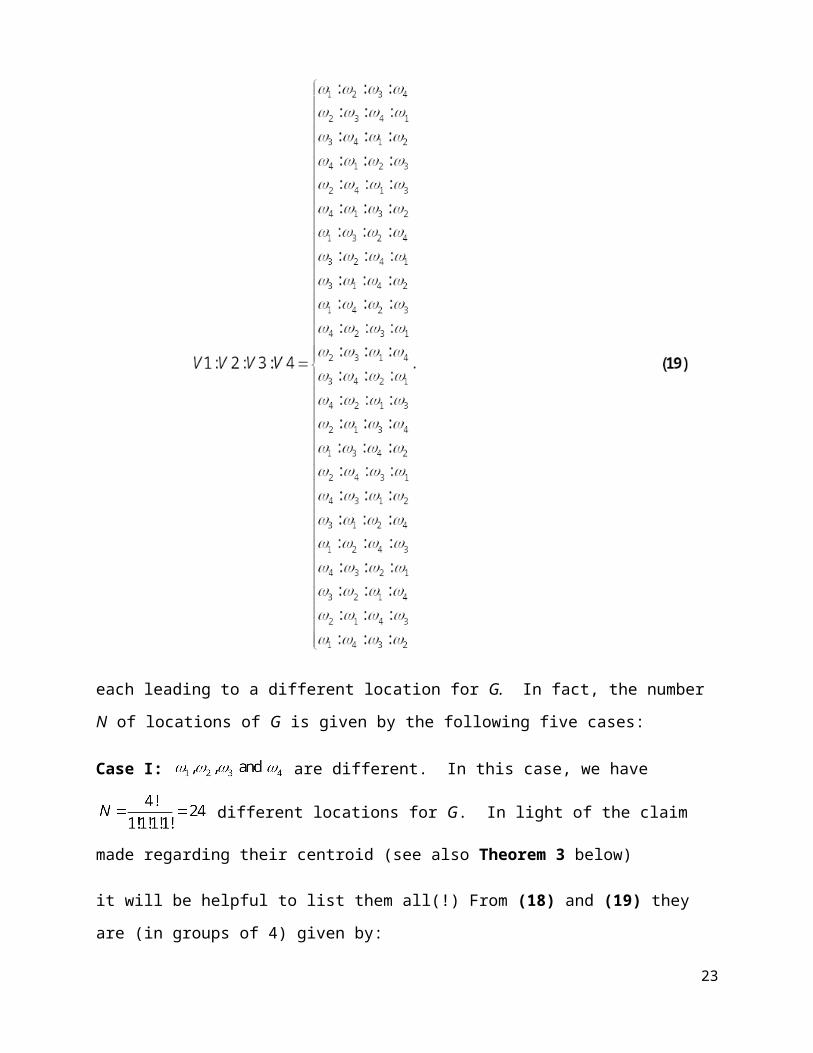
each leading to a different location for G. In fact, the number
N of locations of G is given by the following five cases:
Case I: are different. In this case, we have
different locations for G. In light of the claim
made regarding their centroid (see also Theorem 3 below)
it will be helpful to list them all(!) From (18) and (19) they
are (in groups of 4) given by:
23
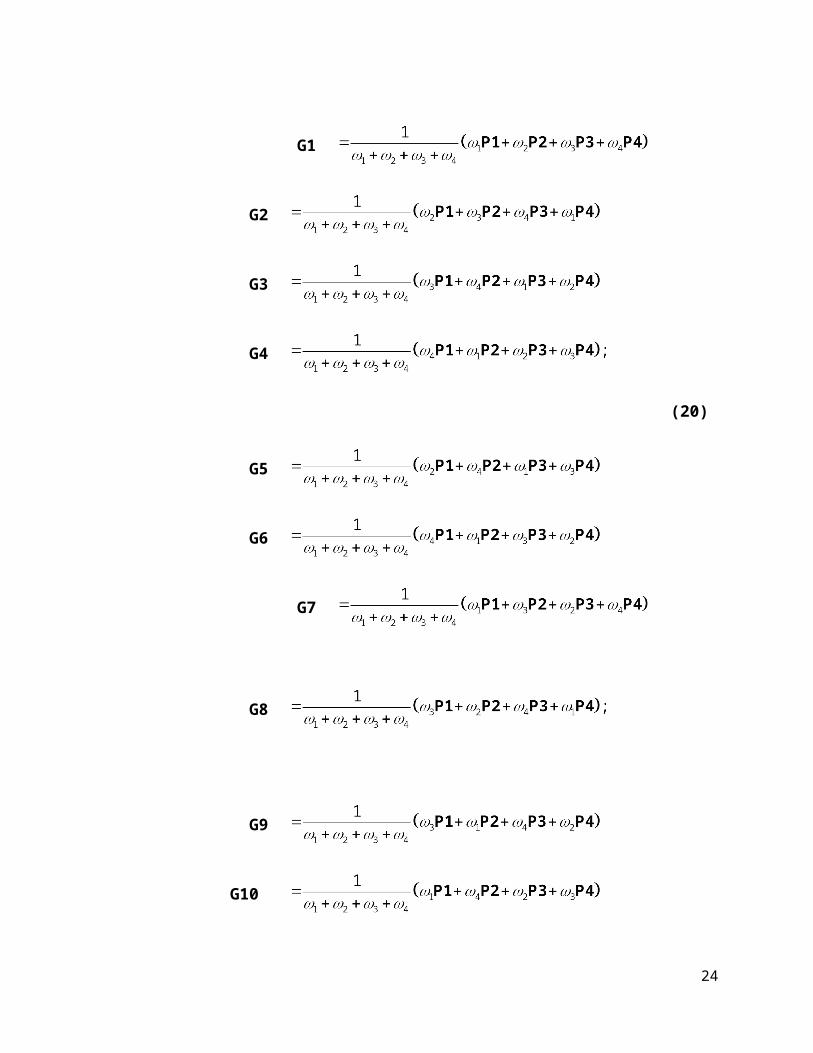
G1
G2
G3
G4
(20)
G5
G6
G7
G8
G9
G10
24
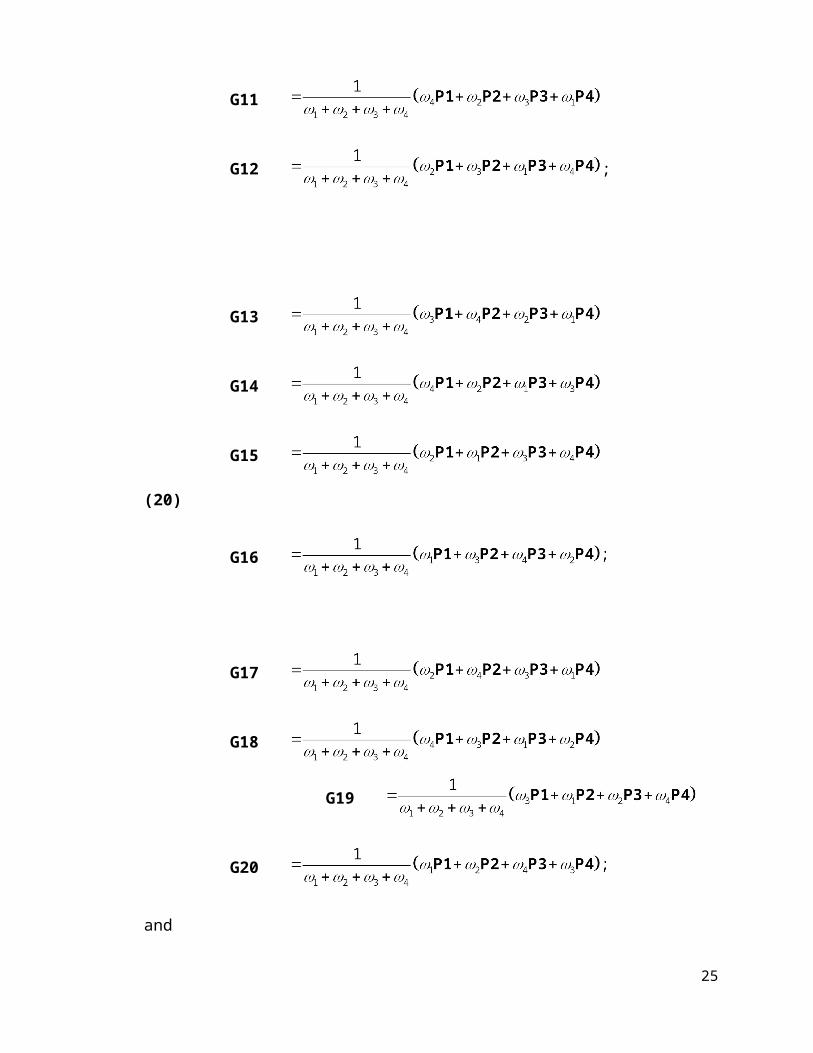
G11
G12 ;
G13
G14
G15
(20)
G16
G17
G18
G19
G20
and
25

G21
G22
(20)
G23
G24
Case II: Of , exactly two are the same (and different
from the other two). In this case, we have different
locations for G. If we assume , then from (18) and (19)
they are (in groups of 4) given by:
G1
G2
(21)
G3
G4
26
G5
G6
G7
G8 ;
and (21)
G9 ;
G10
G11
G12
Case III: Of , exactly two are the same (and so are
the other two). In this case, we have different
locations for G. If we assume that , then from
(18) and (19) they are given by:27
G1
G2
G3
(22)
G4
G5
G6
Case IV: Of , exactly three are the same, the fourth
is different. In this case, there are possible
locations for G. If we assume they are given by
G1
G2
(23)
28

G3
G4 .
Case V: Finally, we have In this case, we have only
possible location for G:
G1
which coincides with the centroid of the original tetrahedron
In Case I, where the twenty-four Gi’s are given in (20), their
centroid H is given by
H
i.e., H ,
29
which coincides with the centroid of the original tetrahedron
T(P1P2P3P4) . Since the same is also true in Cases II, III, IV
and V, this completes the proof of Theorem 2.
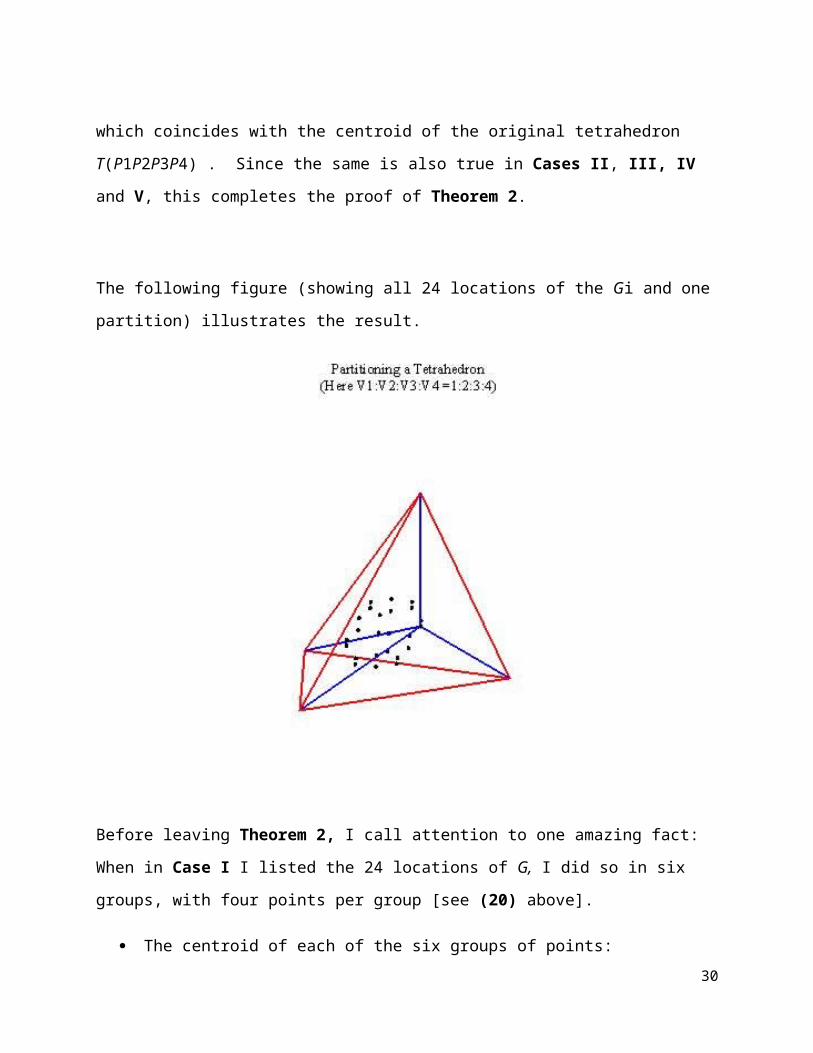
The following figure (showing all 24 locations of the Gi and one
partition) illustrates the result.
Before leaving Theorem 2, I call attention to one amazing fact:
When in Case I I listed the 24 locations of G, I did so in six
groups, with four points per group [see (20) above].
The centroid of each of the six groups of points:30
{G1,G2,G3,G4}, {G5,G6,G7,G8}, {G9,G10,G11,G12},
{G13,G14,G15,G16}, {G17,G18,G19,G20}, and {G21,G22,G23,G24}
is the same as the centroid of the original tetrahedron
.
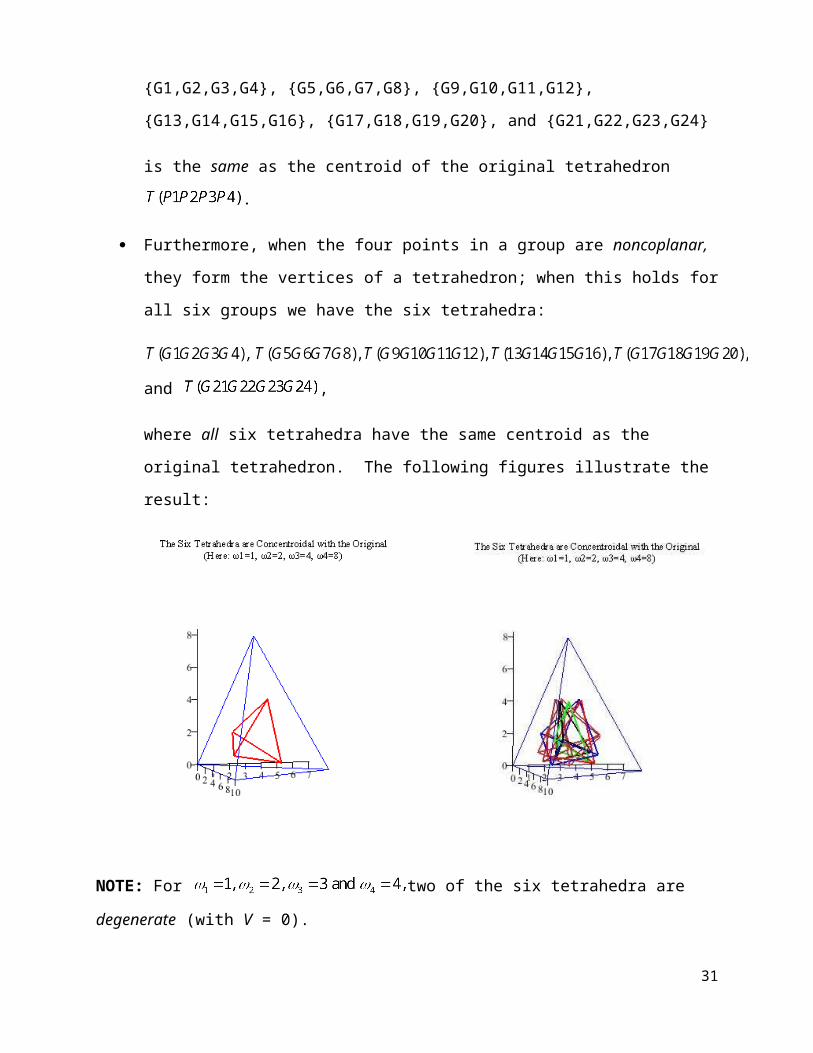
Furthermore, when the four points in a group are noncoplanar,
they form the vertices of a tetrahedron; when this holds for
all six groups we have the six tetrahedra:
and ,
where all six tetrahedra have the same centroid as the
original tetrahedron. The following figures illustrate the
result:
NOTE: For two of the six tetrahedra are
degenerate (with V = 0).
31
Taking one step back…leading to n steps forward?
Having proven the main results of the paper, the “structural
similarities” between the two formulas:
G
(6)
—from which the six possible locations of G can be identified
(Theorem 1) and
G
(18)
—from which the twenty-four possible locations of G can be
identified (Theorem 2)—can certainly catch one’s attention. It
was enough for me to wonder if…
Theorem 0: Let be any two non-coinciding points (the
endpoints of the line segment ) and let
Then, for any given nonnegative constants having
positive sum, one can find a point G inside or on the line
segment such that the lengths L1 and L2 of the sub segments
32
, respectively, satisfy the proportion:
Moreover, the number of such points G for which this is so is
given by the number of distinct permutations of the elements in
Finally, the centroid of these 2 (or 1) points is the
same as the centroid of the original line segment.
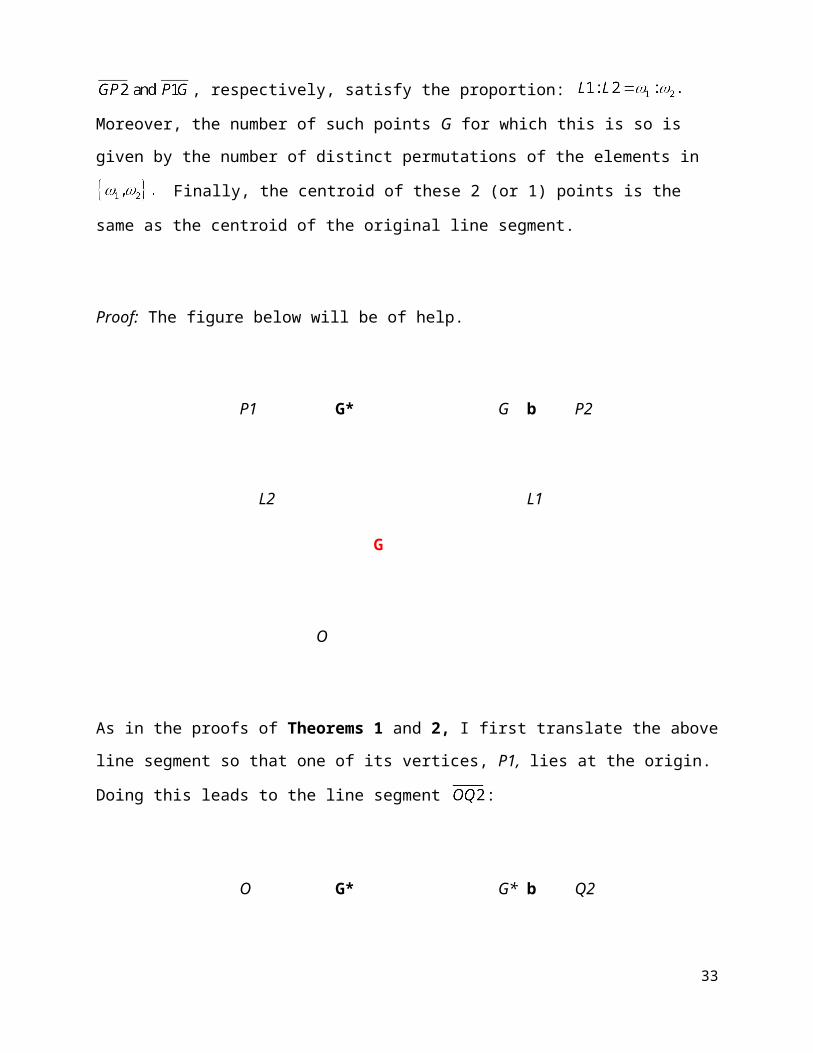
Proof: The figure below will be of help.
P1 G* G b P2
L2 L1
G
O
As in the proofs of Theorems 1 and 2, I first translate the above
line segment so that one of its vertices, P1, lies at the origin.
Doing this leads to the line segment :
O G* G* b Q2
33
L2 L1
where and
Let G* = xQ2 be a point inside or on the line segment . Then
; moreover,
b = Q2 – G*
= Q2 – xQ2
b = (1 – x)Q2.
Let L1 and L2 be the lengths of the indicated sub segments. Then
L1 and L2 .
(24)
Therefore, from (24), if we want , we must solve the
linear equation
34
which has the unique solution: Therefore, we have
G*
(25)
However, since G* = G – P1, equation (25) becomes
G
or, finally,
G
(26)
By considering all distinguishable permutations of the elements
of we see that the proportions in: is just one
of the (up to) two possible:
35
(27)
each leading to a different location for G. In fact, the number
N of locations of G is given by the following two cases:
Case I: are different. In this case, we have
different locations for G; from (21) and (22) they are:
G1
and (28)
G2
Case II: In this case, we have only location for
G; from (21) and (22) it is:
G1
Moreover, in Case I, where the Gi’s are given in (23), we see
that their centroid H is given by
H
36
,
which coincides with the centroid (= midpoint) of the line
segment: . Since the same was also true in Case II, this
completes the proof of Theorem 0.
Because of their geometric significance (the proportional
partitioning of line segments, triangles, and tetrahedra), the
connection between our Theorems 0, 1 and 2 is, of course, much
more than the structural similarity of the formulas:
G
G
and G
37

The question is: How much more? This is undoubtedly an instance
where I am hamstrung by my
limited knowledge of geometry and ignorance of projective
geometry and…, and….
On the other hand, if G. H. Hardy was correct in describing
mathematics—or, at least, modern mathematics [see M. Fried
(2004)]—as “the science of patterns,” then, inspired by the above
pattern, I state and prove a final theorem (whose possible
geometric implications are to me not yet fully known).
Theorem 3: Let P1, P2, …, Pn be n distinct points whose centroid is
G. For i = 1, 2,…, n, let
be constants whose sum is Let , and let S
be the set of all permutations (not necessarily distinct) of the
elements of A. If , then for i = 1, 2, …, n, let denote
its element. Finally, for k = 1, 2, 3, …, n!, define the
points by
(29)38
where Then if H is the centroid of the (not
necessarily distinct) points , then H coincides with the
centroid G of the original points: P1, P2, …, Pn.
Proof: By definition,
i.e., .
(30)
In (30), the “inner sum”: , since there are
(n - 1)! permutations (not necessarily distinct) in S whose
term is . Substituting this into (30), gives:
39
= G
,
and, hence, H coincides with G. This completes the proof of
Theorem 3.
[I regret that when , I cannot specify in advance how many of
the n! points , as defined in (29), will be distinct.]
The following two figures illustrate Theorem 3 when P1, P2, P3 and
P4 are taken to be the vertices of a square (whose centroid is at
its center) and the non-negative constants.
40

NOTE: In the figure to the above right the four chosen were
relatively prime.
The following figures show what can happen when one allows the
to be functions that do not simultaneously vanish on their
common domain—the become trajectories:
41

(In the following note the successive changes in the )
42
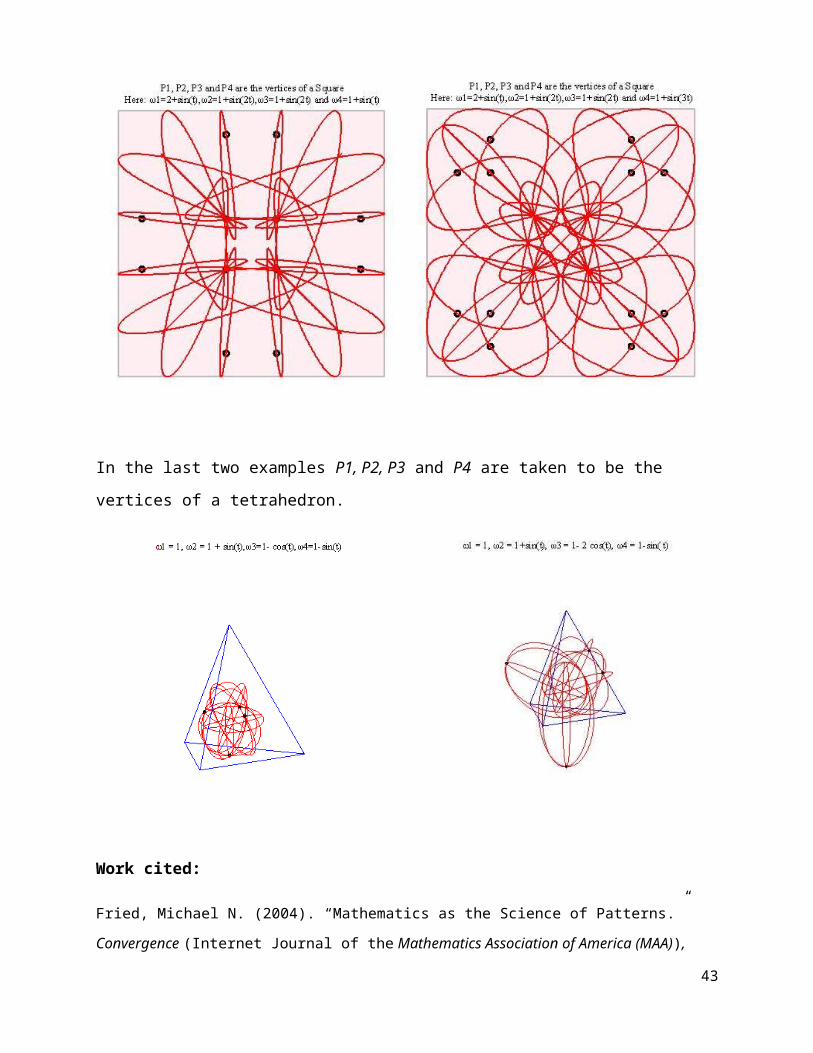
In the last two examples P1, P2, P3 and P4 are taken to be the
vertices of a tetrahedron.
Work cited:
Fried, Michael N. (2004). “Mathematics as the Science of Patterns.”
Convergence (Internet Journal of the Mathematics Association of America (MAA)),
43
http://mathdl.maa.org/mathDL/46/?
pa=content&sa=viewDocument&nodeId=2167. (Last accessed October 11,
2012.)
44
Related Documents











