A Hybrid Harmony Search Algorithm to MRI Brain Segmentation Osama Moh’d Alia, Rajeswari Mandava CVRG - School of Computer Sciences, University Sains Malaysia, 11800 USM, Penang, Malaysia Email: sm [email protected], [email protected] Mohd Ezane Aziz Department of Radiology - Health Campus, Universiti Sains Malaysia, 16150 K.K, Kelantan, Malaysia [email protected] Abstract—Automatic brain MRI image segmentation is a challenging problem and received significant attention in the field of medical image processing. In this paper, we present a new dynamic clustering algorithm based on the Harmony Search (HS) hybridized with Fuzzy C-means called DCHS to automatically segment the brain MRI image in an intelligent manner. In this algorithm, the capability of standard HS is modified to automatically evolve the appropriate number of clusters as well as the locations of cluster centers. By incorporating the concept of variable length in each harmony memory vector, DCHS is able to encode variable numbers of candidate cluster centers at each iteration. Furthermore, a new HS operator, called the ‘empty operator’ is introduced to support the selection of empty decision variables in the harmony memory vector. The PBMF cluster validity index is used as an objective function to validate the clustering result obtained from each harmony memory vector. The proposed algorithm is applied on several simulated T1- weighted normal and MS lesion magnetic resonance brain images. The experimental results show the ability of DCHS to find the ap- propriate number of naturally occurring regions in brain images. Furthermore, superiority of the proposed algorithm over different clustering-based algorithms is demonstrated quantitatively. All the segmented results obtained by DCHS are also compared with the available ground truth images. Index Terms—Automatic Brain MRI segmentation, dynamic fuzzy clustering, harmony search, PBMF index I. I NTRODUCTION The segmentation of Magnetic Resonance Imaging (MRI) brain images is a fundamental process for medical research and clinical applications such as quantification of tissue volume, diagnose illnesses, aid in computer-guided surgery, treatment planning, surgical simulation, therapy evaluation, functional brain mapping, and also study of anatomical structure. In general, the attractive tissues in brain are white matter (WM), gray matter (GM), and cerebrospinal fluid (CSF). Changes in these tissues even in the whole volume or within specific regions can be used to characterize physiological processes and disease entities or to characterize tumor tissues (viable tumor, edema, and necrotic tissues). Basically the MRI brain image segmentation is the task of subdividing this image into constituent regions, in which each region shares similar feature properties. In other words, it is the process of specifying the tissue type for each pixel or voxel in 2D or 3D data set based on information available from both MRI images and the prior knowledge of brain. Actually, MRI sequences such as T1-weighted (T1), T2-weighted (T2) and the proton density (PD) can provide rich information about brain tissues as can be seen in Fig. 1. This information appears in a form of multispectral images, where each image can provide different intensity information for a given anatomical region and subject [1]. However, the process of automatically segmenting the brain images is a complicated and challenging task [2]. This complexity is inherited from the intrinsic nature of the image. The brain image has a particularly complicated structure and it always contains artifacts such as noise, partial volume effect and intensity inhomogeneity [3]. This leads to many different approaches for automatic brain image segmen- tation [3], each of which uses different induction principles such as classification-based methods [1], [4]–[12], region- based methods [13]–[16], boundary-based methods [17]–[20], and others [21]–[25]. For further information see [3], [26] and references therein. Among these algorithms, clustering-based approaches are considered as one of the most popular [27], [28]. Clustering is a very powerful technique whereby data is grouped together with other data sharing particular similarities. It has many useful characteristics which has made it one of the most popular machine learning algorithms not only from the image seg- mentation, but also for other fields such as machine learning, artificial intelligence, pattern recognition, web mining, data mining, biology, remote sensing, marketing, etc [29], [30]. During the last several decades, clustering algorithms have proven to be very reliable, especially in categorization tasks that call for semi or full automation [27], [31]. This is a very promising fact as image segmentation also falls into such categorization tasks. In general, clustering is a typical unsupervised learning technique used to group similar data points according to some measurement of similarity. In image segmentation, clustering algorithms consider the image pixels as data objects and each pixel is assigned to a cluster (image region) based on some feature similarity [32]. This measurement will seek to minimize the inter-cluster similarity while maximizing the intra-cluster similarity [29]. Clustering algorithms can generally be categorized into two groups; hierarchical, and partitional [29]. The former basically produces a nested series of partitions whereas the Proc. 9th IEEE Int. Conf. on Cognitive Informatics (ICCI’10) F. Sun, Y. Wang, J. Lu, B. Zhang, W. Kinsner & L.A. Zadeh (Eds.) 978-1-4244-8040-1/10/$26.00 ©2010 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A Hybrid Harmony Search Algorithm to MRI BrainSegmentation
Osama Moh’d Alia, Rajeswari Mandava
CVRG - School of Computer Sciences,
University Sains Malaysia,
11800 USM, Penang, Malaysia
Email: sm [email protected], [email protected]
Mohd Ezane Aziz
Department of Radiology - Health Campus,
Universiti Sains Malaysia,
16150 K.K, Kelantan, Malaysia
Abstract—Automatic brain MRI image segmentation is achallenging problem and received significant attention in the fieldof medical image processing. In this paper, we present a newdynamic clustering algorithm based on the Harmony Search (HS)hybridized with Fuzzy C-means called DCHS to automaticallysegment the brain MRI image in an intelligent manner. Inthis algorithm, the capability of standard HS is modified toautomatically evolve the appropriate number of clusters as wellas the locations of cluster centers. By incorporating the conceptof variable length in each harmony memory vector, DCHS isable to encode variable numbers of candidate cluster centersat each iteration. Furthermore, a new HS operator, called the‘empty operator’ is introduced to support the selection of emptydecision variables in the harmony memory vector. The PBMFcluster validity index is used as an objective function to validatethe clustering result obtained from each harmony memory vector.The proposed algorithm is applied on several simulated T1-weighted normal and MS lesion magnetic resonance brain images.The experimental results show the ability of DCHS to find the ap-propriate number of naturally occurring regions in brain images.Furthermore, superiority of the proposed algorithm over differentclustering-based algorithms is demonstrated quantitatively. Allthe segmented results obtained by DCHS are also compared withthe available ground truth images.
Index Terms—Automatic Brain MRI segmentation, dynamicfuzzy clustering, harmony search, PBMF index
I. INTRODUCTION
The segmentation of Magnetic Resonance Imaging (MRI)
brain images is a fundamental process for medical research and
clinical applications such as quantification of tissue volume,
diagnose illnesses, aid in computer-guided surgery, treatment
planning, surgical simulation, therapy evaluation, functional
brain mapping, and also study of anatomical structure.
In general, the attractive tissues in brain are white matter
(WM), gray matter (GM), and cerebrospinal fluid (CSF).
Changes in these tissues even in the whole volume or within
specific regions can be used to characterize physiological
processes and disease entities or to characterize tumor tissues
(viable tumor, edema, and necrotic tissues).
Basically the MRI brain image segmentation is the task of
subdividing this image into constituent regions, in which each
region shares similar feature properties. In other words, it is
the process of specifying the tissue type for each pixel or voxel
in 2D or 3D data set based on information available from both
MRI images and the prior knowledge of brain. Actually, MRI
sequences such as T1-weighted (T1), T2-weighted (T2) and
the proton density (PD) can provide rich information about
brain tissues as can be seen in Fig. 1. This information appears
in a form of multispectral images, where each image can
provide different intensity information for a given anatomical
region and subject [1]. However, the process of automatically
segmenting the brain images is a complicated and challenging
task [2]. This complexity is inherited from the intrinsic nature
of the image. The brain image has a particularly complicated
structure and it always contains artifacts such as noise, partial
volume effect and intensity inhomogeneity [3]. This leads to
many different approaches for automatic brain image segmen-
tation [3], each of which uses different induction principles
such as classification-based methods [1], [4]–[12], region-
based methods [13]–[16], boundary-based methods [17]–[20],
and others [21]–[25]. For further information see [3], [26] and
references therein.
Among these algorithms, clustering-based approaches are
considered as one of the most popular [27], [28]. Clustering is a
very powerful technique whereby data is grouped together with
other data sharing particular similarities. It has many useful
characteristics which has made it one of the most popular
machine learning algorithms not only from the image seg-
mentation, but also for other fields such as machine learning,
artificial intelligence, pattern recognition, web mining, data
mining, biology, remote sensing, marketing, etc [29], [30].
During the last several decades, clustering algorithms have
proven to be very reliable, especially in categorization tasks
that call for semi or full automation [27], [31]. This is a
very promising fact as image segmentation also falls into such
categorization tasks.
In general, clustering is a typical unsupervised learning
technique used to group similar data points according to some
measurement of similarity. In image segmentation, clustering
algorithms consider the image pixels as data objects and
each pixel is assigned to a cluster (image region) based on
some feature similarity [32]. This measurement will seek to
minimize the inter-cluster similarity while maximizing the
intra-cluster similarity [29].
Clustering algorithms can generally be categorized into
two groups; hierarchical, and partitional [29]. The former
basically produces a nested series of partitions whereas the
Proc. 9th IEEE Int. Conf. on Cognitive Informatics (ICCI’10) F. Sun, Y. Wang, J. Lu, B. Zhang, W. Kinsner & L.A. Zadeh (Eds.) 978-1-4244-8040-1/10/$26.00 ©2010 IEEE
���
(a) (b)
(c)
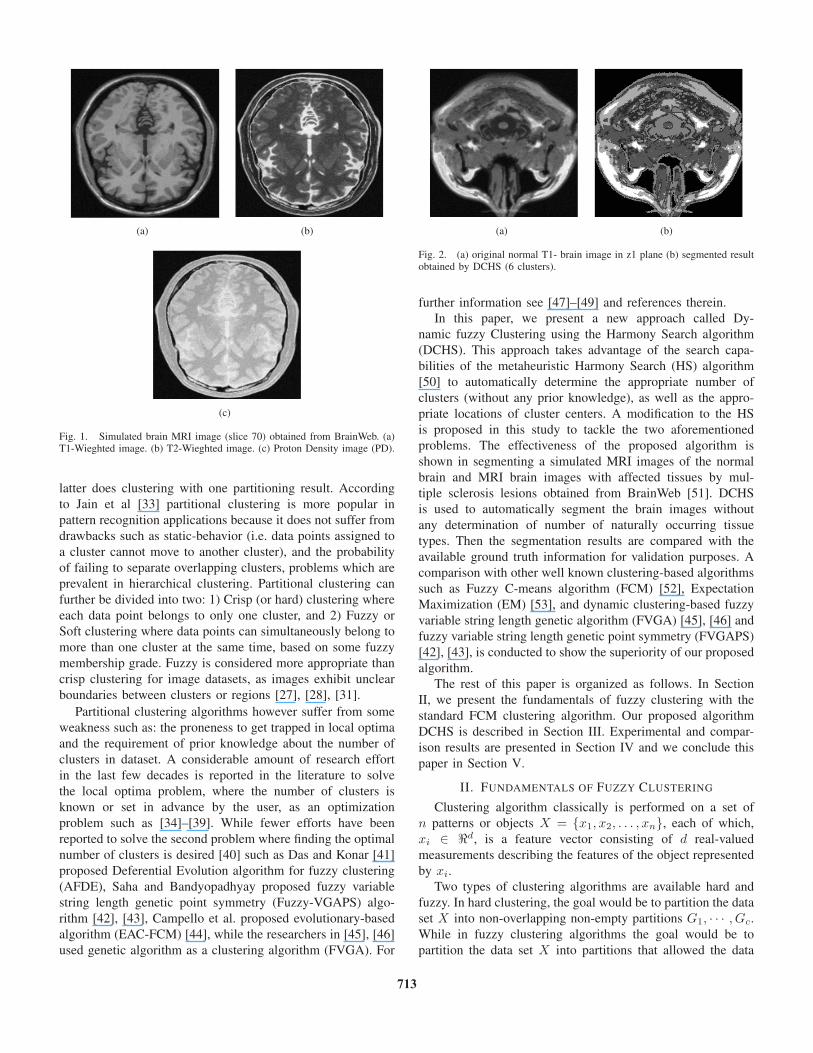
Fig. 1. Simulated brain MRI image (slice 70) obtained from BrainWeb. (a)T1-Wieghted image. (b) T2-Wieghted image. (c) Proton Density image (PD).
latter does clustering with one partitioning result. According
to Jain et al [33] partitional clustering is more popular in
pattern recognition applications because it does not suffer from
drawbacks such as static-behavior (i.e. data points assigned to
a cluster cannot move to another cluster), and the probability
of failing to separate overlapping clusters, problems which are
prevalent in hierarchical clustering. Partitional clustering can
further be divided into two: 1) Crisp (or hard) clustering where
each data point belongs to only one cluster, and 2) Fuzzy or
Soft clustering where data points can simultaneously belong to
more than one cluster at the same time, based on some fuzzy
membership grade. Fuzzy is considered more appropriate than
crisp clustering for image datasets, as images exhibit unclear
boundaries between clusters or regions [27], [28], [31].
Partitional clustering algorithms however suffer from some
weakness such as: the proneness to get trapped in local optima
and the requirement of prior knowledge about the number of
clusters in dataset. A considerable amount of research effort
in the last few decades is reported in the literature to solve
the local optima problem, where the number of clusters is
known or set in advance by the user, as an optimization
problem such as [34]–[39]. While fewer efforts have been
reported to solve the second problem where finding the optimal
number of clusters is desired [40] such as Das and Konar [41]
proposed Deferential Evolution algorithm for fuzzy clustering
(AFDE), Saha and Bandyopadhyay proposed fuzzy variable
string length genetic point symmetry (Fuzzy-VGAPS) algo-
rithm [42], [43], Campello et al. proposed evolutionary-based
algorithm (EAC-FCM) [44], while the researchers in [45], [46]
used genetic algorithm as a clustering algorithm (FVGA). For
(a) (b)
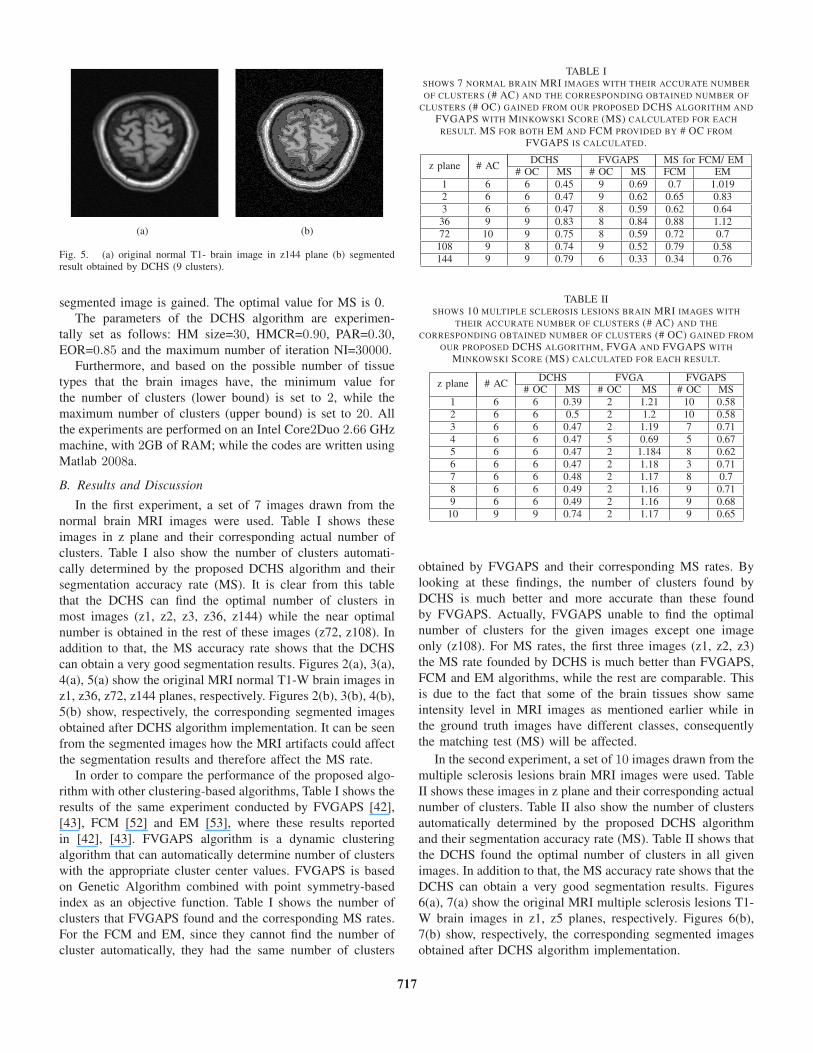
Fig. 2. (a) original normal T1- brain image in z1 plane (b) segmented resultobtained by DCHS (6 clusters).
further information see [47]–[49] and references therein.
In this paper, we present a new approach called Dy-
namic fuzzy Clustering using the Harmony Search algorithm
(DCHS). This approach takes advantage of the search capa-
bilities of the metaheuristic Harmony Search (HS) algorithm
[50] to automatically determine the appropriate number of
clusters (without any prior knowledge), as well as the appro-
priate locations of cluster centers. A modification to the HS
is proposed in this study to tackle the two aforementioned
problems. The effectiveness of the proposed algorithm is
shown in segmenting a simulated MRI images of the normal
brain and MRI brain images with affected tissues by mul-
tiple sclerosis lesions obtained from BrainWeb [51]. DCHS
is used to automatically segment the brain images without
any determination of number of naturally occurring tissue
types. Then the segmentation results are compared with the
available ground truth information for validation purposes. A
comparison with other well known clustering-based algorithms
such as Fuzzy C-means algorithm (FCM) [52], Expectation
Maximization (EM) [53], and dynamic clustering-based fuzzy
variable string length genetic algorithm (FVGA) [45], [46] and
fuzzy variable string length genetic point symmetry (FVGAPS)
[42], [43], is conducted to show the superiority of our proposed
algorithm.
The rest of this paper is organized as follows. In Section
II, we present the fundamentals of fuzzy clustering with the
standard FCM clustering algorithm. Our proposed algorithm
DCHS is described in Section III. Experimental and compar-
ison results are presented in Section IV and we conclude this
paper in Section V.
II. FUNDAMENTALS OF FUZZY CLUSTERING
Clustering algorithm classically is performed on a set of
n patterns or objects X = {x1, x2, . . . , xn}, each of which,
xi ∈ �d, is a feature vector consisting of d real-valued
measurements describing the features of the object represented
by xi.
Two types of clustering algorithms are available hard and
fuzzy. In hard clustering, the goal would be to partition the data
set X into non-overlapping non-empty partitions G1, · · · , Gc.
While in fuzzy clustering algorithms the goal would be to
partition the data set X into partitions that allowed the data
��4

(a) (b)
Fig. 3. (a) original normal T1- brain image in z36 plane (b) segmented resultobtained by DCHS (9 clusters).
object to belong in a particular (possibly null) degree to every
fuzzy cluster. The clustering output is a membership matrix
called a fuzzy partition matrix U = [uij ](c×n) as in Eq (1).
Where uij ∈ [0, 1] represents the fuzzy membership of the ithobject to the jth fuzzy cluster.
Mfcn ={
U ∈ �c×n|∑cj=1 Uij = 1, 0 <
∑ni=1 Uij < n
, and Uij ∈ [0, 1] ; 1 ≤ j ≤ c; 1 ≤ i ≤ n
}(1)
Fuzzy C-means algorithm (FCM) [52] is considered as one
of the most popular fuzzy partitioning algorithms. FCM is
an iterative procedure which is able to locally minimize the
following objective function:
Jm =c∑
j=1
n∑i=1
umij‖xi − vj‖2 (2)
where {vj}cj=1 are the centroids of the clusters c and ‖.‖
denotes an inner-product norm (e.g. Euclidean distance) from
the data point xi to the jth cluster center, and the parameter
m ∈ [1,∞), is a weighting exponent on each fuzzy member-
ship that determines the amount of fuzziness of the resulting
classification.
FCM algorithm starts with random initial c cluster centers,
and then at every iteration it finds the fuzzy membership of
each data point to every cluster using the following equation:
uij =1∑c
k=1
( ‖xi−vj‖‖xi−vk‖
) 2m−1
(3)
Based on the membership values, the cluster centers are
recomputed using the following equation:
vj =
∑ni=1 um
ij · xi∑ni=1 um
ij
(4)
The algorithm terminates when there is no further change in
the cluster centers.
III. HARMONY SEARCH-BASED FUZZY CLUSTERING -
DCHS ALGORITHM
Harmony Search is a relatively new stochastic metaheuristic
algorithm, which was developed by Geem et al. in 2001 [50]
and successfully applied to different optimization problems
(see [54] and references therein). It is a very successful
metaheuristic algorithm through its ability to exploit the new
suggested solution (harmony) synchronizing with exploring
the search space in both intensification and diversification
parallel optimization environment [55]. This algorithm imitates
the natural phenomenon of musicians’ behavior when they
cooperate the pitches of their instruments together to achieve
a fantastic harmony as measured by aesthetic standards. In the
following sections we describe a model of HS that represents
our proposed algorithm DCHS.
A. Initialization of DCHS Parameters
The DCHS algorithm parameters are same as the standard
HS parameters except the new operator ‘empty operator’ that
will be describing later. These parameters are:
1) Harmony Memory Size (HMS) (i.e. number of solution
vectors in harmony memory);
2) Harmony Memory Considering Rate (HMCR), where
HMCR ∈ [0, 1] ;
3) Pitch Adjusting Rate (PAR), where PAR ∈ [0, 1];4) Stopping Criteria (i.e. number of improvisation (NI));
5) Empty Operator Rate (EOR) ∈ [0, 1].
B. Initialization of Harmony Memory
Each harmony memory (HM) vector encodes the cluster
centers of the given data set. Since the number of these clusters
are unknown a priori, a possible range of number of clusters
that the given data set may possess is tested. Consequently,
each harmony memory vector can vary in length according to
the randomly generated number of clusters for each vector.
To initialize the HM with feasible solutions, each harmony
memory vector initially encodes a number of cluster centers,
denoted by ‘ClustNo’, such that:
clustNo = (rand() ×(clustMaxNo − clustMinNo))+ clustMinNo (5)
The number of clusters ‘clustNo’ is picked at random between
‘clustMinNo’ and ‘clustMaxNo’, where ‘clustMaxNo’ is an
estimate of the maximum number of clusters (upper bound),
while ‘clustMinNo’ is the minimum number of clusters (lower
bound). The values of upper and lower bounds are set depend-
ing on the data sets used.
Even though the vector length is allowed to vary, for a
matrix representation, each vector length in HM must be made
equal to the maximum number of clusters (‘clustMaxNo’).
Consequently, for d-dimensional space, the length of the vector
is (clustMaxNo × d), where the first d-locations correspond
to the first cluster center, the next d-locations correspond to
the second cluster centers and so forth.
In case of encoding a vector with a number of clusters less
than the ‘clustMaxNo’, the vector is occupied by these cluster
centers in random positions, while the remaining unused vector
elements (referred to as “ don’t care ” as in ( [45])) are
represented with ‘#’ sign. To illustrate the idea, let d = 2and clustMaxNo = 6, i.e. the feature space is 2-dimensional
and the maximum number of clusters is equal to 6. Now let
���

one of the HM vector has only 3-candidate cluster centers such
as: {(25.1, 13.2), (14, 6.3), (8.3, 3)}Then these 3 centers will be set in the vector in arbitrary
order while the rest of the vector’s elements are set to “don’t
care” with the ‘#’ sign as illustrated in Eq. (6)
HM = {25.1 13.2 # # # # 14 6.3 # # 8.3 3}(6)
The last step in harmony memory initialization process is to
calculate the fitness function for each harmony vector and
saved in harmony memory as explained in section (III-F).
C. Improvisation of a New Harmony Vector
In each iteration of HS, a new harmony vector is generated
based on the HS’s improvisation rules mentioned in [56]. These
rules are HM consideration; pitch adjustment; or random con-
sideration. In HM consideration, the value of the component
(i.e. decision variable) of the new vector is inherited from the
possible range of the harmony memory vectors stored in HM.
This is the case when a random number ∈ [0, 1] is within the
probability of HMCR; otherwise, the value of the component
of the new vector is selected from the possible data range with
a probability of (1-HMCR).
Furthermore, the new vector components which are selected
out of memory consideration operator are examined to be pitch
adjusted with the probability of (PAR). If it is, then the value
of this component becomes:
(aNEWi ) = (aNEW
i ) ± rand() ∗ bw (7)
here, bw is an arbitrary distance bandwidth used to im-
prove the performance of HS and its value is set to
bw=0.001*maxValue(n). The other important issue worth men-
tioning is when the inherited components of the new vector
have don’t care values ‘#’. In this case, no pitch adjustment
will take place.
D. Empty Operator
To further enhance the concept of variable-length of the
harmony memory vectors, a new HS operator called the ‘emptyoperator’ is proposed. This new operator is introduced mainly
to add the empty (don’t care) decision variables in the newly
generated harmony vector with a particular rate, namely Empty
Operator Rate (EOR) ∈ [0, 1]. The main rationale behind
the new operator is so that DCHS works in a more stable
manner. In other words, the new operator is introduced to
minimize the variation of the results (i.e. number of clusters)
that may obtained from DCHS in case of multiple runs. Where
the inconsistent results from multiple runs can be due to
the dominating effect of a number of solution vectors of the
HM through the improvisation process (premature convergence
problem). Therefore, the ability of generating of a new vector
with different number of cluster centers is very poor. For that,
the new operator is introduced to add a new method of having
empty ’don’t care’ decision variables in the newly generated
harmony vector. This is done in parallel with the normal way
(i.e. inherited from HM) of having the empty components in
the new vector.
The empty operator works as follows:
1) If the generated random number is within the probability
of HMCR, the value of the new decision variable is
randomly inherited from the historical values which are
stored in the HM.
2) Otherwise, if the generated random number is within
the probability of (1-HMCR), a new random number
between 0 and 1 is generated. If this random number
within the probability of EOR, then the new decision
variable is assigned a random number within the possible
data range. Otherwise, a don’t care (‘#’) value is assigned
to the new decision variable.
Furthermore, If the value of this rate is too low, only a
few random values from the visible data range are selected
and it may converge too slowly. If this rate is extremely high
(approaching 1), the addition of don’t care elements into the
new harmony vector rarely happens which may lead to an
unstable clustering results. The value of this operator is indeed
subject to the givin data set. According to this added operator,
the DCHS algorithm still has the ability to generate a new
harmony vector with varying lengths of number of clusters,
even in the final stages of the DCHS algorithm search process.
In other words, this new operator increases the diversity of
don’t care components in DCHS.
E. Update the Harmony Memory
Once the new harmony vector is generated, a count is
done on the generated number of cluster centers in the new
vector. If it is less than the minimum number of cluster centers
(clustMinNo), the new vector will be rejected. Otherwise, the
new vector will be accepted and a fitness function is computed
using a cluster validity measurement described in Section
(III-F). Then, the new vector is compared with the worst
harmony memory solution in terms of the fitness function. If
it is better, the new vector is included in the harmony memory
and the worst harmony is excluded.
F. Evaluation of Solutions
The evaluation (fitness value) of each harmony memory
vector indicates the degree of goodness of the solution it
represents. In order to evaluate the goodness of each harmony
memory vector, the empty components that may appear in
the harmony vector is removed and the remaining components
which represent the cluster centers are used to cluster the given
dataset (e.g. image). DCHS performs clustering based on pixels
of an image in the gray-scale intensity space, where each data
point (e.g. pixel) in the given data set (image) is assigned to
one or more clusters (regions) with a membership grade. The
membership value for each data point is calculated based on
Eq.(3).
After that, the goodness of the clustering result (i.e. U
matrix) is measured using a cluster validity index. Therefore,
the validity index measurement is used as the fitness function
in this study. In this paper, a recently developed index, which
exhibits a good trade-off between efficacy and computational
concern, is used. This index is named PBMF-index which is
��C

the fuzzy version of PBM-index [57]. PBMF-index is defined
as follows:
PBMF (c) =(
1c× E1
Ec× Dc
)p
(8)
where c is the number of clusters. Here
Ec =c∑
j=1
n∑i=1
umij ‖xi − vj‖ (9)
and
Dc = maxi,l‖vi − vl‖ (10)
where the power p is used to control the contrast between the
different cluster configurations and it is set to be 2. E1 is a
constant term for a particular data set and it is used to avoid
the index value from approaching zero. The value of m , which
is the fuzziness weighting exponent, is experimentally set to
1. Dc measures the maximum separation between two clusters
over all possible pairs of clusters, while Ec measures the sum
of c within-cluster distances (i.e., compactness).
The main goal of PBMF-index is to maximize the inter-
cluster distances (separation) while minimizing the intra-
cluster distances (compactness). Hence, the maximization of
PBMF-index indicates accurate clustering results and conse-
quently, accurate number of clusters could be achieved.
G. Check the Stopping Criterion
This process is repeated until the maximum number of
iterations (NI) is reached. In the end, the best solution among
the maximum value of fitness function of each HM solution
vectors is selected to be the best solution vector.
H. Hybridization with FCM
A hybridizing step with FCM is introduced to increase the
quality of the DCHS clustering results. This step is introduced
to DCHS by calling the FCM algorithm just one time to fine
tuning the best solution that have been optimized by DCHS.
The solution vector with highest fitness value is selected from
harmony memory and considered as initial values for FCM’s
cluster centers. In this case, FCM through its mechanism
modifies the cluster centers values until the variance of the
clusters are minimum, thus yielding more compact clusters.
Consequently, the clustering results achieved by DCHS will
decrease the variation within each cluster members (intra-
cluster variation) and at a same time increase the variation
between clusters (inter-cluster variation).
IV. EXPERIMENTAL RESULTS AND DISCUSSION
A. Experiment Setting
The proposed DCHS clustering algorithm is used as an
image segmentation algorithm to automatically segment the
given image into naturally occurring regions. DCHS uses the
intensity value for each pixel as a feature space to perform
the segmentation. DCHS is applied to automatically segment
a set of simulated MRI images of the normal brain and
MRI brain images with multiple sclerosis lesions obtained
from BrainWeb [51]. The simulated MRI volumes provided
(a) (b)
Fig. 4. (a) original normal T1- brain image in z72 plane (b) segmented resultobtained by DCHS (9 clusters).
by BrainWeb [51] are full 3D data volumes that have been
simulated using three sequences T1-weighted, T2-weighted,
and Proton Density (PD)-weighted with a variety of slice
thicknesses, noise levels, and levels of intensity non-uniformity
(intensity inhomogeneity) [51]. In this study, the experiments
were conducted only for some of T1-weighted images with
1 mm slice thickness, 3% noise and with 20% intensity non-
uniformity.
Each volume consists of 181 images with size 217 × 181for each. Each image in this volume may contain different
tissue types based on the axial location of the image in the
brain. In normal brain images, 10 classes of brain tissues
are presented where the number of classes varies along the
different z planes. These classes are Background, CSF, Grey
Matter, White Matter, Fat, Muscle/Skin, Skin, Skull, Glial
Matter and Connective tissues. While in multiple sclerosis
lesions brain images, 11 classes of brain tissues are presented
where the number of classes varies along the different z planes.
These classes are same as normal volumes except the MS
Lesion. It is worth mentioning here that some of these tissues
show same intensity level in MRI images such as background
and skull, WM and Connective tissues, CSF and skin.
Since the ground truth information is available and provided
by BrainWeb [51], a quantization index was used to evaluate
the performance of segmentation based on the accuracy of
the classification. The accuracy rate is calculated based on
the matching between the ground truth reference image and a
segmented image obtained from the proposed DCHS automatic
segmentation method. The quantization index used in this
study is Minkowski Score (MS) [58] that is calculated as
follows:
MS(T, S) =√
n01 + n10
n11 + n10(11)
Where T represents the partitioning matrix of the ground
truth image and S represents the partitioning matrix of the
segmented image. The n11 denotes the number of pairs of
elements that are in the same cluster in both S and T. The
n01 denotes the number of pairs that are in the same cluster
only in S, and the n10 denotes the number of pairs that are
in the same cluster in T. The minimum value of MS means
that the best matching between the ground truth image and the
��B
(a) (b)
Fig. 5. (a) original normal T1- brain image in z144 plane (b) segmentedresult obtained by DCHS (9 clusters).
segmented image is gained. The optimal value for MS is 0.
The parameters of the DCHS algorithm are experimen-
tally set as follows: HM size=30, HMCR=0.90, PAR=0.30,
EOR=0.85 and the maximum number of iteration NI=30000.
Furthermore, and based on the possible number of tissue
types that the brain images have, the minimum value for
the number of clusters (lower bound) is set to 2, while the
maximum number of clusters (upper bound) is set to 20. All
the experiments are performed on an Intel Core2Duo 2.66 GHz
machine, with 2GB of RAM; while the codes are written using
Matlab 2008a.
B. Results and Discussion
In the first experiment, a set of 7 images drawn from the
normal brain MRI images were used. Table I shows these
images in z plane and their corresponding actual number of
clusters. Table I also show the number of clusters automati-
cally determined by the proposed DCHS algorithm and their
segmentation accuracy rate (MS). It is clear from this table
that the DCHS can find the optimal number of clusters in
most images (z1, z2, z3, z36, z144) while the near optimal
number is obtained in the rest of these images (z72, z108). In
addition to that, the MS accuracy rate shows that the DCHS
can obtain a very good segmentation results. Figures 2(a), 3(a),
4(a), 5(a) show the original MRI normal T1-W brain images in
z1, z36, z72, z144 planes, respectively. Figures 2(b), 3(b), 4(b),
5(b) show, respectively, the corresponding segmented images
obtained after DCHS algorithm implementation. It can be seen
from the segmented images how the MRI artifacts could affect
the segmentation results and therefore affect the MS rate.
In order to compare the performance of the proposed algo-
rithm with other clustering-based algorithms, Table I shows the
results of the same experiment conducted by FVGAPS [42],
[43], FCM [52] and EM [53], where these results reported
in [42], [43]. FVGAPS algorithm is a dynamic clustering
algorithm that can automatically determine number of clusters
with the appropriate cluster center values. FVGAPS is based
on Genetic Algorithm combined with point symmetry-based
index as an objective function. Table I shows the number of
clusters that FVGAPS found and the corresponding MS rates.
For the FCM and EM, since they cannot find the number of
cluster automatically, they had the same number of clusters
TABLE ISHOWS 7 NORMAL BRAIN MRI IMAGES WITH THEIR ACCURATE NUMBER
OF CLUSTERS (# AC) AND THE CORRESPONDING OBTAINED NUMBER OF
CLUSTERS (# OC) GAINED FROM OUR PROPOSED DCHS ALGORITHM AND
FVGAPS WITH MINKOWSKI SCORE (MS) CALCULATED FOR EACH
RESULT. MS FOR BOTH EM AND FCM PROVIDED BY # OC FROM
FVGAPS IS CALCULATED.
z plane # ACDCHS FVGAPS MS for FCM/ EM
# OC MS # OC MS FCM EM1 6 6 0.45 9 0.69 0.7 1.0192 6 6 0.47 9 0.62 0.65 0.833 6 6 0.47 8 0.59 0.62 0.64
36 9 9 0.83 8 0.84 0.88 1.1272 10 9 0.75 8 0.59 0.72 0.7
108 9 8 0.74 9 0.52 0.79 0.58144 9 9 0.79 6 0.33 0.34 0.76
TABLE IISHOWS 10 MULTIPLE SCLEROSIS LESIONS BRAIN MRI IMAGES WITH
THEIR ACCURATE NUMBER OF CLUSTERS (# AC) AND THE
CORRESPONDING OBTAINED NUMBER OF CLUSTERS (# OC) GAINED FROM
OUR PROPOSED DCHS ALGORITHM, FVGA AND FVGAPS WITH
MINKOWSKI SCORE (MS) CALCULATED FOR EACH RESULT.
z plane # ACDCHS FVGA FVGAPS
# OC MS # OC MS # OC MS1 6 6 0.39 2 1.21 10 0.582 6 6 0.5 2 1.2 10 0.583 6 6 0.47 2 1.19 7 0.714 6 6 0.47 5 0.69 5 0.675 6 6 0.47 2 1.184 8 0.626 6 6 0.47 2 1.18 3 0.717 6 6 0.48 2 1.17 8 0.78 6 6 0.49 2 1.16 9 0.719 6 6 0.49 2 1.16 9 0.68
10 9 9 0.74 2 1.17 9 0.65
obtained by FVGAPS and their corresponding MS rates. By
looking at these findings, the number of clusters found by
DCHS is much better and more accurate than these found
by FVGAPS. Actually, FVGAPS unable to find the optimal
number of clusters for the given images except one image
only (z108). For MS rates, the first three images (z1, z2, z3)
the MS rate founded by DCHS is much better than FVGAPS,
FCM and EM algorithms, while the rest are comparable. This
is due to the fact that some of the brain tissues show same
intensity level in MRI images as mentioned earlier while in
the ground truth images have different classes, consequently
the matching test (MS) will be affected.
In the second experiment, a set of 10 images drawn from the
multiple sclerosis lesions brain MRI images were used. Table
II shows these images in z plane and their corresponding actual
number of clusters. Table II also show the number of clusters
automatically determined by the proposed DCHS algorithm
and their segmentation accuracy rate (MS). Table II shows that
the DCHS found the optimal number of clusters in all given
images. In addition to that, the MS accuracy rate shows that the
DCHS can obtain a very good segmentation results. Figures
6(a), 7(a) show the original MRI multiple sclerosis lesions T1-
W brain images in z1, z5 planes, respectively. Figures 6(b),
7(b) show, respectively, the corresponding segmented images
obtained after DCHS algorithm implementation.
���

(a) (b)
Fig. 6. (a) original multiple sclerosis lesions T1- brain image in z1 plane (b)segmented result obtained by DCHS (6 clusters).
In order to compare the performance of the proposed algo-
rithm with other dynamic clustering-based algorithms, Table
II shows the results of the same experiment conducted by
FVGAPS [42], [43] and FVGA [45], [46], where these results
reported in [42], [43]. FVGA algorithm also is a dynamic
clustering algorithm that can automatically determine number
of clusters with the appropriate cluster center values. FVGA
is based on Genetic Algorithm combined with XB index as
an objective function. Table II shows the number of clusters
that FVGAPS found and the corresponding MS rates. Also
the number of clusters found by FVGA for the given images
and their corresponding MS rates are shown in the same table.
By looking at these findings, the number of clusters found
by DCHS is much better and more accurate than these found
by FVGAPS and FVGA. FVGAPS unable to find the optimal
number of clusters for all given images except image z10 only.
While FVGA failed to find the optimal number of clusters
for all given images. The MS rates also show the superiority
of the proposed DCHS algorithm compared with the other
algorithms.
V. CONCLUSION
We have presented in this paper a novel dynamic clustering
algorithm called DCHS based on Harmony Search algorithm
hybridized with Fuzzy C-means algorithm. DCHS has the
ability to cluster the given data set automatically without any
prior knowledge of number of clusters that may the given
data set has. DCHS have been used as an image segmentation
algorithm to dynamically segment a simulated normal and
multiple sclerosis lesions brain MRI images.
The numbers of clusters found by DCHS for the brain im-
ages were the best among other dynamic clustering algorithms
(FVGAPS and FVGA). The accuracy rates of segmentation
results were the highest for multiple sclerosis lesions images
while comparable in the normal brain images.
Regarding the MRI artifacts such as noise and intensity non-
uniformity, the upcoming research will focus on how to im-
prove the segmentation results of DCHS algorithm and how to
incorporate the spatial information to reduce the effectiveness
of these artifacts. Furthermore, another study of how to reduce
the impact of the problem of non-similar brain tissue types
(a) (b)
Fig. 7. (a) original multiple sclerosis lesions T1- brain image in z5 plane (b)segmented result obtained by DCHS (6 clusters).
with similar intensity appearance will be also the upcoming
research interest.
ACKNOWLEDGMENT
The authors thank Dr. Dhanesh Ramachandram and Dr. Sri-
parna Saha for their comments regarding this manuscript. This
research is supported by Universiti Sains Malaysia, USM’s
fellowship scheme and ’Universiti Sains Malaysia Research
University Grant’ grant titled ’Delineation and visualization of
Tumour and Risk Structures - DVTRS’ under grant number
1001/PKOMP/817001.
REFERENCES
[1] W. Dou, S. Ruan, Y. Chen, D. Bloyet, and J.-M. Constans, “A frameworkof fuzzy information fusion for the segmentation of brain tumor tissueson mr images,” Image and Vision Computing, vol. 25, no. 2, pp. 164–171,2007.
[2] J. Wang, J. Kong, Y. Lu, M. Qi, and B. Zhang, “A modified fcmalgorithm for mri brain image segmentation using both local and non-local spatial constraints,” Computerized Medical Imaging and Graphics,vol. 32, no. 8, pp. 685–698, 2008.
[3] A. W.-C. Liew and H. Yan, “Current methods in the automatic tissuesegmentation of 3d magnetic resonance brain images,” Current medicalimaging reviews, vol. 2, pp. 91–103, 2006.
[4] I. Wells, W. M., W. E. L. Grimson, R. Kikinis, and F. A. Jolesz, “Adaptivesegmentation of mri data,” Medical Imaging, IEEE Transactions on,vol. 15, no. 4, pp. 429–442, 1996.
[5] T. Kapur, W. E. L. Grimson, W. M. Wells, and R. Kikinis, “Segmen-tation of brain tissue from magnetic resonance images,” Medical ImageAnalysis, vol. 1, no. 2, pp. 109–127, 1996.
[6] J. Zhou and J. C. Rajapakse, “Fuzzy approach to incorporate hemo-dynamic variability and contextual information for detection of brainactivation,” Neurocomputing, vol. 71, no. 16-18, pp. 3184–3192, 2008.
[7] L. Szilagyi, Z. Benyo, S. M. Szilagyi, and H. S. Adam, “Mr brainimage segmentation using an enhanced fuzzy c-means algorithm,” inProceedings of the 25th Annual International Conference of the IEEEEngineering in Medicine and Biology Society,, vol. 1, 2003, pp. 724–726.
[8] H. A. Mokbel, M. E.-S. Morsy, and F. E. Z. Abou-Chadi, “Automaticsegmentation and labeling of human brain tissue from mr images,” inSeventeenth National Radio Science Conference, 17th NRSC ’, 2000, pp.1–8.
[9] L. Xiaohe, Z. Taiyi, and Q. Zhan, “Image segmentation using fuzzyclustering with spatial constraints based on markov random field viabayesian theory,” IEICE Trans. Fundam. Electron. Commun. Comput.Sci., vol. E91-A, no. 3, pp. 723–729, 2008.
[10] K. Van Leemput, F. Maes, D. Vandermeulen, and P. Suetens, “Automatedmodel-based tissue classification of mr images of the brain,” IEEETransactions on Medical Imaging, vol. 18, no. 10, pp. 897–908, 1999.
[11] K. Van Leemput, F. Maes, D. Vandermeulen, and P. Suetens, “Automatedmodel-based bias field correction of mr images of the brain,” IEEETransactions on Medical Imaging, vol. 18, no. 10, pp. 885–896, 1999.
���
[12] J. C. Bezdek, L. O. Hall, and L. P. Clarke, “Review of mr imagesegmentation techniques using pattern recognition,” Medical Physics,vol. 20, no. 4, pp. 1033–1048, 1993.
[13] Y. L. Chang and X. Li, “Adaptive image region-growing,” IEEE Trans-actions on Image Processing, vol. 3, no. 6, pp. 868–872, 1994.
[14] R. Adams and L. Bischof, “Seeded region growing,” IEEE Transactionson pattern analysis and machine intelligence, vol. 16, no. 6, pp. 641–647,1994.
[15] R. Pohle and K. D. Toennies, “Segmentation of medical images usingadaptive region growing,” in Proceedings of SPIE (Medical Imaging),vol. 4322, San Diego, 2001, pp. 1337–1346.
[16] J. Sijbers, P. Scheunders, M. Verhoye, A. Van der Linden, D. van Dyck,and E. Raman, “Watershed-based segmentation of 3d mr data for volumequantization,” Magnetic Resonance Imaging, vol. 15, no. 6, pp. 679–688,1997.
[17] M. S. Atkins and B. T. Mackiewich, “Fully automatic segmentation ofthe brain in mri,” IEEE Transactions on Medical Imaging,, vol. 17, no. 1,pp. 98–107, 1998.
[18] M. Ashtari, J. L. Zito, B. I. Gold, J. A. Lieberman, M. T. Borenstein, andP. G. Herman, “Computerized volume measurement of brain structure,”Investigative Radiology, vol. 25, no. 7, pp. 798–805, 1990.
[19] L. Ji and H. Yan, “Attractable snakes based on the greedy algorithm forcontour extraction,” Pattern Recognition, vol. 35, no. 4, pp. 791–806,2002.
[20] T. McInerney and D. Terzopoulos, “Deformable models in medical imageanalysis: a survey,” Medical Image Analysis, vol. 1, no. 2, pp. 91–108,1996.
[21] Y. Zhou and J. Bai, “Atlas-based fuzzy connectedness segmentationand intensity nonuniformity correction applied to brain mri,” IEEETransactions on Biomedical Engineering,, vol. 54, no. 1, pp. 122–129,2007.
[22] M. C. Clark, “Knowledge-guided processing of magnetic resonanceimages of the brain,” Ph.D. dissertation, University of South Florida,Department of Computer Science and Engineering, South Florida USA,1998.
[23] M. Clark, L. Hall, D. Goldgof, and M. Silbiger, “Using fuzzy informationin knowledge guided segmentation of brain tumors,” in Fuzzy Logic inArtificial Intelligence Towards Intelligent Systems, 1997, pp. 167–181.
[24] M. Sonka, S. K. Tadikonda, and S. M. Collins, “Knowledge-basedinterpretation of mr brain images,” IEEE Transactions on MedicalImaging,, vol. 15, no. 4, pp. 443–452, 1996.
[25] S. Shen, W. Sandham, M. Granat, and A. Sterr, “Mri fuzzy seg-mentation of brain tissue using neighborhood attraction with neural-network optimization,” IEEE Transactions on Information Technologyin Biomedicine, vol. 9, no. 3, pp. 459–467, 2005.
[26] D. L. Pham, C. Xu, and J. L. Prince, “Current methods in medical imagesegmentation,” Annual Review of Biomedical Engineering, vol. 2, no. 1,pp. 315–337, 2000.
[27] P. Hore, L. O. Hall, D. B. Goldgof, Y. Gu, A. A. Maudsley, andA. Darkazanli, “A scalable framework for segmenting magnetic reso-nance images,” Journal of Signal Processing Systems, vol. 54, no. 1-3,pp. 183–203, 2008.
[28] J. Kang, L. Min, Q. Luan, X. Li, and J. Liu, “Novel modified fuzzy c-means algorithm with applications,” Digital Signal Processing, vol. 19,no. 2, pp. 309–319, 2009.
[29] A. K. Jain, M. N. Murty, and P. J. Flynn, “Data clustering: a review,”ACM Comput. Surv., vol. 31, no. 3, pp. 264–323, 1999.
[30] S. E. Brian, L. Sabine, and L. Morven. Wiley Publishing, 2009.[31] H. Zhou, “Fuzzy c-means and its applications in medical imaging,”
in Computational Intelligence in Medical Imaging: Techniques andApplications, 2009, p. 213.
[32] A. Rosenfeld and A. C. Kak, Digital Picture Processing. AcademicPress, Inc. New York, NY., 1982, vol. 2nd.
[33] A. K. Jain, R. P. W. Duin, and M. Jianchang, “Statistical patternrecognition: a review,” IEEE Transactions on Pattern Analysis andMachine Intelligence,, vol. 22, no. 1, pp. 4–37, 2000.
[34] O. M. Alia, R. Mandava, D. Ramachandram, and M. E. Aziz, “Harmonysearch- based cluster initialization for fuzzy c-means segmentation ofmr images.” in International Technical Conference of IEEE Region 10(TENCON), Singapore, 2009, pp. 1–6.
[35] O. M. Alia, R. Mandava, D. Ramachandram, and M. E. Aziz, “Anovel image segmentation algorithm based on harmony fuzzy searchalgorithm,” in International Conference of Soft Computing and PatternRecognition, SOCPAR ’09., Malacca, Malaysia, 2009, pp. 335–340.
[36] J. C. Bezdek and R. J. Hathaway, “Optimization of fuzzy clusteringcriteria using genetic algorithms,” in Proceedings of the First IEEEConference on Evolutionary Computation,IEEE World Congress onComputational Intelligence, vol. 2, Orlando, FL, USA, 1994, pp. 589–594.
[37] U. Maulik and I. Saha, “Modified differential evolution based fuzzyclustering for pixel classification in remote sensing imagery,” PatternRecognition, vol. 42, no. 9, pp. 2135–2149, 2009.
[38] P. M. Kanade and L. O. Hall, “Fuzzy ants and clustering,” IEEETransactions on Systems, Man and Cybernetics,Part A,, vol. 37, no. 5,pp. 758–769, 2007.
[39] K. S. Al-Sultan and C. A. Fedjki, “A tabu search-based algorithm forthe fuzzy clustering problem,” Pattern Recognition, vol. 30, no. 12, pp.2023–2030, 1997.
[40] S. Das, A. Abraham, and A. Konar, “Metaheuristic pattern clustering -an overview,” in Metaheuristic Clustering. Springer, 2009, pp. 1–62.
[41] S. Das and A. Konar, “Automatic image pixel clustering with animproved differential evolution,” Applied Soft Computing, vol. 9, no. 1,pp. 226–236, 2009.
[42] S. Saha and S. Bandyopadhyay, “A new point symmetry based fuzzygenetic clustering technique for automatic evolution of clusters,” Infor-mation Sciences, vol. 179, no. 19, pp. 3230–3246, 2009.
[43] S. Saha and S. Bandyopadhyay, “Mri brain image segmentation by fuzzysymmetry based genetic clustering technique,” in IEEE Congress onEvolutionary Computation, CEC, 2007, pp. 4417–4424.
[44] R. Campello, E. Hruschka, and V. Alves, “On the efficiency of evolution-ary fuzzy clustering,” Journal of Heuristics, vol. 15, no. 1, pp. 43–75,2009.
[45] M. K. Pakhira, S. Bandyopadhyay, and U. Maulik, “A study of somefuzzy cluster validity indices, genetic clustering and application to pixelclassification,” Fuzzy Sets and Systems, vol. 155, no. 2, pp. 191–214,2005.
[46] U. Maulik and S. Bandyopadhyay, “Fuzzy partitioning using a real-coded variable-length genetic algorithm for pixel classification,” IEEETransactions on Geoscience and Remote Sensing., vol. 41, no. 5, pp.1075–1081, 2003.
[47] E. R. Hruschka, R. J. G. B. Campello, A. A. Freitas, and A. C. P. L. F. d.Carvalho, “A survey of evolutionary algorithms for clustering,” IEEETransactions on Systems, Man and Cybernetics, Part C: Applicationsand Reviews, vol. 39, pp. 133–155, 2009.
[48] D. Horta, M. Naldi, R. Campello, E. Hruschka, and A. de Carvalho,“Evolutionary fuzzy clustering: An overview and efficiency issues,” inFoundations of Computational Intelligence, 2009, pp. 167–195.
[49] S. Das, A. Abraham, and A. Konar, Metaheuristic Clustering. SpringerVerlag, Germany, 2009.
[50] Z. W. Geem, J. H. Kim, and G. Loganathan, “A new heuristic opti-mization algorithm: harmony search.” SIMULATION, vol. 76, no. 2, pp.60–68, 2001.
[51] “Brain web: Simulated brain database. mcconnell brain imagingcentre. montreal neurological institute, mcgill university,http://www.bic.mni.mcgill.ca/brainweb.”
[52] J. C. Bezdek, Pattern Recognition with Fuzzy Objective Function Algo-rithms. Kluwer Academic Publishers, 1981.
[53] A. P. Dempster, N. M. Laird, and D. B. Rubin, “Maximum likelihoodfrom incomplete data via the em algorithm,” Journal of the RoyalStatistical Society. Series B (Methodological), vol. 39, no. 1, pp. 1–38,1977.
[54] G. Ingram and T. Zhang, in Music-Inspired Harmony Search Algorithm.Springer Berlin / Heidelberg, 2009, pp. 15–37.
[55] Z. W. Geem, Harmony Search Algorithms for Structural Design Opti-mization. Springer Berlin / Heidelberg, 2009.
[56] Z. W. Geem, C.-L. Tseng, and Y. Park, “Harmony search for generalizedorienteering problem: Best touring in china,” in Advances in NaturalComputation. Springer Berlin / Heidelberg, 2005, pp. 741–750.
[57] M. K. Pakhira, S. Bandyopadhyay, and U. Maulik, “Validity index forcrisp and fuzzy clusters,” Pattern Recognition, vol. 37, no. 3, pp. 487–501, 2004.
[58] A. Ben-Hur and I. Guyon, “Detecting stable clusters using principal com-ponent analysis,” Methods in Molecular Biology-Clifton then Totowa,vol. 224, pp. 159–182, 2003.
��

further investigation. Since our goal is to improve the AUC
metric of the evolved classifiers, we may use the AUC as
fitness directly. We refer to such a fitness function as fA.
In Li’s method [12], the cost-sensitive fitness function fCgiven in Equation 6 is chosen:
fC = w1 ∗ Accuracy− w2 ∗RF − w3 ∗RMC (6)
w1, w2 and w3 are the weights of the metrics. Since our
target is to find the classifier with the maximum AUC, we
may instead take the AUC measure as fitness function. On
the other hand, we wish to explore the use of the entropy
similar to C4.5, since it has a positive correlation with AUC
but is much easier to compute.
H(X) = −n∑
i=0
p(xi) log2 p(xi) (7)
Equation 7 gives the definition of the information gain [23]
for a random variable X with n outcomes {xi : i = 1....n}.The Shannon entropy, a measure of uncertainty is denoted
by H(X) and p(xi) is the probability mass function of the
outcomes xi.
pi =Pi
1∑j=0
Pj
(8)
fE =
NL∑k=0
(1 +
1∑i=0
pi log2 pi
)(1∑
j=0
(Pj − 1)
)
Ntr −NL(9)
We can easily introduce a fitness function very similar
to Shannon’s formula as given in Equation 9.It’s a novel
decision tree structure. In a decision tree T as used in our
EDDIE-102 system, two numbers are assigned to each of
the NL leaf node: P0 is used to record how many negative
instances arrive at it and the other (P1) is used to record how
many positive instances arrived. The range of the entropy-
based fitness fE is from 0 to 1. When fE = 1, the classifier
has the best training result, fE = 0 means the classifier is a
random one.
IV. THE IMPROVED ALGORITHM: EDDIE-102
The main routine of our improved approach (called
EDDIE-102) is given in 2. It is a version of standard Genetic
Programming process extended with a local search and an
ensemble approach.
A. Crossover Steered by Badfitness
We use the badfitness bf of an individual T applied to the
training data D as guide for parent selection as the candidate
individuals for crossover or mutation. This idea stems from
[11]. According to 10, the badfitness of an individual here
stands for how far away it is from achieving the best fitness.
bf = 1− fE (10)
Algorithm EDDIE-102(M , N )
M is the maximum generation
N is the size of the ensemble
BEGIN
Let gen = 0Initialize the population using the grow method
while (gen < M )
Evaluate fitness(fE) of each individual
Update archive of Best N individuals
Survival Selection : Tournament Selection by fECrossover and Mutation
Adjust Individuals with Hill-Climbing
gen = gen+ 1end while
Ensemble the Best N individuals on test data set
ENDFigure 2. The EDDIE-102 Algorithm
We also utilize some of the ideas from [11]. Crossover
plays important role in genetic programming. We produce
offspring according to a given crossover rate. All candidate
parents to be made crossover on are selected via another
tournament which is one by the participating individual
with the highest badfitness. This will give more chance
for decision tree with lager badfitness to be changed, i.e.,
to likely be improved. The crossover operation swaps two
subtrees from the two different individuals.
B. Modified Mutation
Subsequently, individuals are selected for mutation ac-
cording to the mutation rate pm. The mutation operation
is usually a destructive process. Since we do not want to
destroy the good parts of a decision tree, we create several
mutated offspring of an individual in order to find one whose
fitness is better than the one of the parent. Many mutation
operations, however, cost much training time. In [11], a
strategy to reduce computation time is adopted: 50% of
the training cases are used to evaluate the fitness fm of
the mutated individual and the fitness fo of the original
individual. If fm equals fo, the remaining 50% of the
training cases are used to get fm. If the mutated individual is
equally good or better than its parent, it is kept. Otherwise,
the mutation operation is ignored with the probability pt. In
our experiments, we set pt = 0.5.
C. Ensemble
Our system does not only return a single classifier as result
of the optimization process, but instead uses the aggregated
knowledge in the population by combining the N best
classifiers to an ensemble. In this section, we describe an
ensemble method to give scores to training and test cases
as needed for computing the AUC metric and ROC graphs.
The decision trees used by us are different from traditional
decision trees, as already mentioned in the discussion of 9.
���
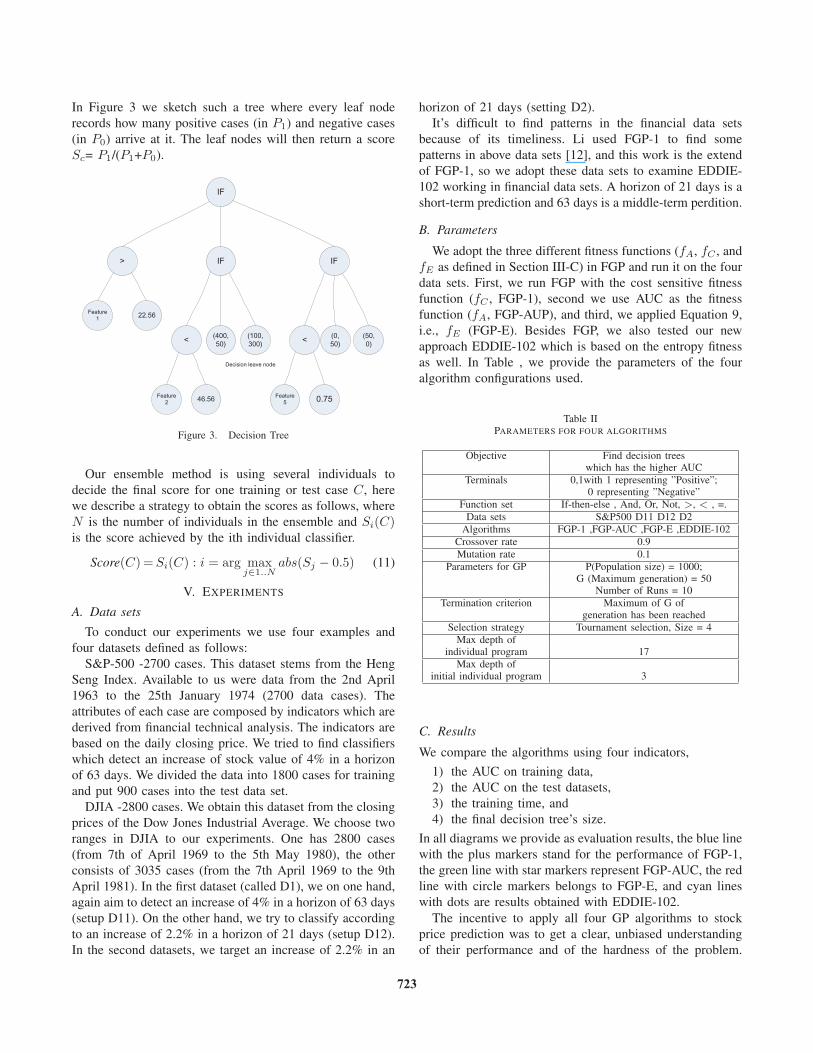
In Figure 3 we sketch such a tree where every leaf node
records how many positive cases (in P1) and negative cases
(in P0) arrive at it. The leaf nodes will then return a score
Sc= P1/(P1+P0).
Figure 3. Decision Tree
Our ensemble method is using several individuals to
decide the final score for one training or test case C, here
we describe a strategy to obtain the scores as follows, where
N is the number of individuals in the ensemble and Si(C)is the score achieved by the ith individual classifier.
Score(C) =Si(C) : i = arg maxj∈1..N
abs(Sj − 0.5) (11)
V. EXPERIMENTS
A. Data sets
To conduct our experiments we use four examples and
four datasets defined as follows:
S&P-500 -2700 cases. This dataset stems from the Heng
Seng Index. Available to us were data from the 2nd April
1963 to the 25th January 1974 (2700 data cases). The
attributes of each case are composed by indicators which are
derived from financial technical analysis. The indicators are
based on the daily closing price. We tried to find classifiers
which detect an increase of stock value of 4% in a horizon
of 63 days. We divided the data into 1800 cases for training
and put 900 cases into the test data set.
DJIA -2800 cases. We obtain this dataset from the closing
prices of the Dow Jones Industrial Average. We choose two
ranges in DJIA to our experiments. One has 2800 cases
(from 7th of April 1969 to the 5th May 1980), the other
consists of 3035 cases (from the 7th April 1969 to the 9th
April 1981). In the first dataset (called D1), we on one hand,
again aim to detect an increase of 4% in a horizon of 63 days
(setup D11). On the other hand, we try to classify according
to an increase of 2.2% in a horizon of 21 days (setup D12).
In the second datasets, we target an increase of 2.2% in an
horizon of 21 days (setting D2).
It’s difficult to find patterns in the financial data sets
because of its timeliness. Li used FGP-1 to find some
patterns in above data sets [12], and this work is the extend
of FGP-1, so we adopt these data sets to examine EDDIE-
102 working in financial data sets. A horizon of 21 days is a
short-term prediction and 63 days is a middle-term perdition.
B. Parameters
We adopt the three different fitness functions (fA, fC , and
fE as defined in Section III-C) in FGP and run it on the four
data sets. First, we run FGP with the cost sensitive fitness
function (fC , FGP-1), second we use AUC as the fitness
function (fA, FGP-AUP), and third, we applied Equation 9,
i.e., fE (FGP-E). Besides FGP, we also tested our new
approach EDDIE-102 which is based on the entropy fitness
as well. In Table , we provide the parameters of the four
algorithm configurations used.
Table IIPARAMETERS FOR FOUR ALGORITHMS
Objective Find decision treeswhich has the higher AUC
Terminals 0,1with 1 representing ”Positive”;0 representing ”Negative”
Function set If-then-else , And, Or, Not, >, < , =.Data sets S&P500 D11 D12 D2
Algorithms FGP-1 ,FGP-AUC ,FGP-E ,EDDIE-102Crossover rate 0.9Mutation rate 0.1
Parameters for GP P(Population size) = 1000;G (Maximum generation) = 50
Number of Runs = 10Termination criterion Maximum of G of
generation has been reachedSelection strategy Tournament selection, Size = 4
Max depth ofindividual program 17
Max depth ofinitial individual program 3
C. Results
We compare the algorithms using four indicators,
1) the AUC on training data,
2) the AUC on the test datasets,
3) the training time, and
4) the final decision tree’s size.
In all diagrams we provide as evaluation results, the blue line
with the plus markers stand for the performance of FGP-1,
the green line with star markers represent FGP-AUC, the red
line with circle markers belongs to FGP-E, and cyan lines
with dots are results obtained with EDDIE-102.
The incentive to apply all four GP algorithms to stock
price prediction was to get a clear, unbiased understanding
of their performance and of the hardness of the problem.
��4
more and more researchers [10, 11, 15, 17, 18] adopt the
Area under an ROC Curve (AUC) for measuring their final
results. This measure is considered to be more reasonable
than accuracy in comparing learning algorithms [19]. In this
work, we will introduce AUC into FGP in order to improve
its performance and result quality.
The C4.5 algorithm by Quinlan [8] is a famous tool
for classification. Because of its greedy tree construction
algorithm, it is faster than most other classification ap-
proaches. It utilizes entropy as heuristic which costs much
less computation time than AUC. We will therefore also
test how using entropy as classifier fitness influences the
performance of our Genetic Programming system.
EDDIE-1 and FGP-1 adopt a standard EA and simple
operators in the algorithms. Besides the two mentioned
novelties, we also introduce the unfitness method discussed
by Muni et al. [11] and a modified mutation operator into
EDDIE-3.
III. CLASSIFIER METRICS AND FITNESS FUNCTION
A classifier performance metric is a value which rates the
utility of the classifier. The larger (or smaller) this value is,
the better classifier. There are various metrics for measuring
classifiers and we describe the ones relevant to our work in
the following.
A. Confusion Matrix and Metrics
Table ICONFUSION MATRIX TO CLASSIFY TWO CLASSES
TN FP TN + FPFN TP FN + TP
TN + FN FP + TP Ntr.
Table I sketches the blueprint of a confusion matrix for
a binary classification problem. Here, true positive (TP) is
the number of instances which are positive and which have
also been classified as positive, false negatives (FN) are the
instance which belong to class positive but are classified as
negative, and the meaning of false positives (FP) and true
negative (TN) are analogous. Ntr is the total number of
instances in the data set. From the confusion matrix, the
following metrics can be extracted:
Accuracy =TP + TN
Ntr(1)
True-Positive Rate(Recall) =TP
FN + TP(2)
False-Positive Rate (FPR) =FP
TN + FP(3)
Rate of Failure(RF ) =FP
FP + TP(4)
Rate of Missing chance(RMC) =FN
FN + TP(5)
Accuracy focuses on the rate of correct classification in
the whole data set but does not consider the balance [20,
21] of the data set. Assume, for example, that there is a
dataset with 90 positive instances and 10 negative instances.
A classifier always classifying an instance as positive will
then have an accuracy rating of 0.9. Although this rating is
high, it is meaningless.
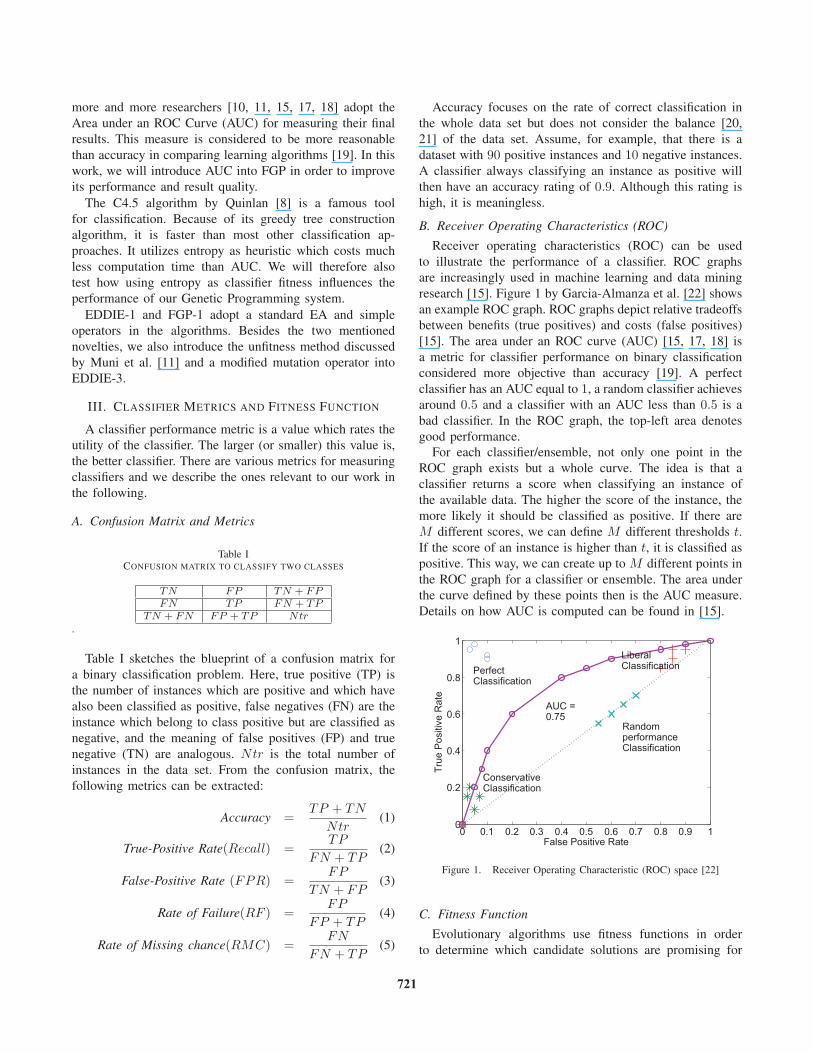
B. Receiver Operating Characteristics (ROC)
Receiver operating characteristics (ROC) can be used
to illustrate the performance of a classifier. ROC graphs
are increasingly used in machine learning and data mining
research [15]. Figure 1 by Garcia-Almanza et al. [22] shows
an example ROC graph. ROC graphs depict relative tradeoffs
between benefits (true positives) and costs (false positives)
[15]. The area under an ROC curve (AUC) [15, 17, 18] is
a metric for classifier performance on binary classification
considered more objective than accuracy [19]. A perfect
classifier has an AUC equal to 1, a random classifier achieves
around 0.5 and a classifier with an AUC less than 0.5 is a
bad classifier. In the ROC graph, the top-left area denotes
good performance.
For each classifier/ensemble, not only one point in the
ROC graph exists but a whole curve. The idea is that a
classifier returns a score when classifying an instance of
the available data. The higher the score of the instance, the
more likely it should be classified as positive. If there are
M different scores, we can define M different thresholds t.If the score of an instance is higher than t, it is classified as
positive. This way, we can create up to M different points in
the ROC graph for a classifier or ensemble. The area under
the curve defined by these points then is the AUC measure.
Details on how AUC is computed can be found in [15].
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
False Positive Rate
True
Pos
itive
Rat
e
AUC =0.75
PerfectClassification
ConservativeClassification
LiberalClassification
RandomperformanceClassification
Figure 1. Receiver Operating Characteristic (ROC) space [22]
C. Fitness Function
Evolutionary algorithms use fitness functions in order
to determine which candidate solutions are promising for
���
Related Documents











