A GRASP algorithm for fast hybrid 1 (filter-wrapper) feature subset selection in 2 high-dimensional datasets 3 Pablo Bermejo, Jose A. G´ amez, Jose M. Puerta 4 {Pablo.Bermejo,Jose.Gamez,Jose.Puerta}@uclm.es 5 Intelligent Systems and Data Mining Laboratory. Computing Systems Department 6 Universidad de Castilla-La Mancha. Albacete, 02071, Spain 7 Abstract 8 Feature subset selection is a key problem in the data-mining classification task that helps to obtain more compact and understandable models without degrad- ing (or even improving) their performance. In this work we focus on FSS in high-dimensional datasets, that is, with a very large number of predictive at- tributes. In this case, standard sophisticated wrapper algorithms cannot be applied because of their complexity, and computationally lighter filter-wrapper algorithms have recently been proposed. In this work we propose a stochastic al- gorithm based on the GRASP meta-heuristic, with the main goal of speeding up the feature subset selection process, basically by reducing the number of wrap- per evaluations to carry out. GRASP is a multi-start constructive method which constructs a solution in its first stage, and then runs an improving stage over that solution. Several instances of the proposed GRASP method are experimentally tested and compared with state-of-the-art algorithms over 12 high-dimensional datasets. The statistical analysis of the results shows that our proposal is com- parable in accuracy and cardinality of the selected subset to previous algorithms, but requires significantly fewer evaluations. Keywords: Feature selection, classification, GRASP, filter, wrapper, 9 high-dimensional datasets 10 Preprint submitted to Elsevier February 9, 2011

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

A GRASP algorithm for fast hybrid1
(filter-wrapper) feature subset selection in2
high-dimensional datasets3
Pablo Bermejo, Jose A. Gamez, Jose M. Puerta4
{Pablo.Bermejo,Jose.Gamez,Jose.Puerta}@uclm.es5
Intelligent Systems and Data Mining Laboratory. Computing Systems Department6
Universidad de Castilla-La Mancha. Albacete, 02071, Spain7
Abstract8
Feature subset selection is a key problem in the data-mining classification task
that helps to obtain more compact and understandable models without degrad-
ing (or even improving) their performance. In this work we focus on FSS in
high-dimensional datasets, that is, with a very large number of predictive at-
tributes. In this case, standard sophisticated wrapper algorithms cannot be
applied because of their complexity, and computationally lighter filter-wrapper
algorithms have recently been proposed. In this work we propose a stochastic al-
gorithm based on the GRASP meta-heuristic, with the main goal of speeding up
the feature subset selection process, basically by reducing the number of wrap-
per evaluations to carry out. GRASP is a multi-start constructive method which
constructs a solution in its first stage, and then runs an improving stage over that
solution. Several instances of the proposed GRASP method are experimentally
tested and compared with state-of-the-art algorithms over 12 high-dimensional
datasets. The statistical analysis of the results shows that our proposal is com-
parable in accuracy and cardinality of the selected subset to previous algorithms,
but requires significantly fewer evaluations.
Keywords: Feature selection, classification, GRASP, filter, wrapper,9
high-dimensional datasets10
Preprint submitted to Elsevier February 9, 2011

1. Introduction11
This paper deals with the problem of Feature Subset Selection (FSS) in12
the task of supervised classification. Supervised classification is probably the13
data-mining / machine-learning technique that is most commonly used in prac-14
tice. The goal is to learn a function or classifier C from a training set that15
consists of pairs (−→x , c), where −→x = (x1, . . . , xn) denotes the value assigned16
for each attribute in this instance, and y is its correct output. Variables in17
X = {X1, . . . , Xn} are known as predictive attributes while C is known as the18
class, and it can take a finite number {c1, . . . , ck} of values/states/categories or19
simply classes. Thus, we aim to learn a function C : X1 × · · · ×Xn → C that is20
able to generalize from the known data presented in the training set to unseen21
situations in a reasonable way.22
In the data-mining / machine learning community the function C is referred23
to as a classifier and can belong to different paradigms: decision trees (Quinlan,24
1986), Bayesian classifiers (Duda and Hart, 1973; Webb et al., 2005), nearest25
neighbours (Aha et al., 1991), neural networks (Bishop, 1995), support vector26
machines (Boser et al., 1992), etc. In all cases, the time needed to learn and27
execute the classifier, as well as its complexity and the probability of over-fitting,28
increases when we have a large number of predictive attributes, many of them29
being irrelevant or redundant in the presence of others. Because of these reasons,30
and others such as the cost (not only economic) associated with each predictive31
attribute (e.g. physical sensors, medical tests, invasive surgery, etc), reducing32
the number of predictive attributes but without degrading the performance of33
the classifier is one of the data preprocessing tasks most frequently dealt with34
in the literature. This task receives the name of feature subset selection (FSS)35
or variable selection (Guyon and Elisseeff, 2003; Liu and Motoda, 1998) and its36
2

performance can be meassured in different ways, the most commonly used being37
the accuracy of the classifier obtained.38
In this paper we focus on the framework described above (supervised clas-39
sification and the use of accuracy as performance measure), but in addition40
we add the constraint of dealing with high-dimensional datasets, that is, we41
are interested in carrying out FSS over datasets having thousands of variables42
(microarrays, text-mining, etc.). Our goal is to develop an algorithm able to per-43
form FSS efficiently in high-dimensional datasets, and so we aim to maintain (or44
improve) the performance (accuracy and compactness) of previous approaches45
in the literature for dealing with this type of datasets (sequential and incremen-46
tal FSS algorithms (Ruiz et al., 2006; Bermejo et al., 2009; Kittler, 1978)) whilst47
carrying out a significantly smaller number of evaluations. To do this, we pro-48
pose to hybridize these types of FSS algorithms with a randomized algorithm49
known as GRASP (Greedy Randomized Adaptive Search Procedure) (Feo and50
Resende, 1995). GRASP is a multi-start two-stage algorithm. At each iteration51
the method carries out two steps: first a randomized procedure is used to con-52
struct a potential solution to the problem under study; and then, this solution53
is improved by using (usually) a local search method. Randomization of the54
constructive procedure is needed in order to obtain good but different starting55
points. GRASP can then be viewed as a global optimization method, which56
usually improves the quality of the solution obtained by specific heuristics. As57
we have stated above, our goal in this paper is to take advantage of the degrees58
of freedom provided by GRASP criteria design in order to drastically decrease59
the number of wrapper evaluations (proportional to the CPU time needed), but60
of course, without degrading the performance (classification accuracy).61
Our study is structured as follows: the next section presents some prelim-62
inaries on the FSS problem, while Section 3 introduces the basic description63
3
of GRASP meta-heuristics; Section 4 describes in detail the incremental FSS64
algorithm which is used as a building block in our proposal; then, in Section 565
we present our proposed GRASP-based FSS algorithm and in Section 6 we test66
it by means of a set of experiments over high-dimensional datasets; finally, in67
Section 7 we present our concluding remarks and some ideas for future work.68
2. Feature subset selection69
The goal of FSS is to obtain an (almost) optimal subset of the available70
predictive attributes according to a performance score, classification accuracy71
in our case. Because of the large cardinality (2n) of the search space (P(X)),72
exhaustive search is intractable even for moderate values of n, and so different73
strategies must be employed.74
FSS algorithms result from the combination of (1) a search method and75
(2) an evaluation strategy to score the goodness of the candidate features. By76
excluding Embedded methods, where it is the same algorithm for learning the77
classifier that carries out the FSS process (e.g. C4.5 (Quinlan, 1986)), we can78
identify the following search strategies: Complete, Ranker, Sequential, Incre-79
mental and Metaheuristics. As for the features, these may be evaluated in a80
filter or wrapper way.81
In the filter approach, the goodness of an attribute or set of attributes is82
estimated by using only intrinsic properties of the data, while in the wrapper83
approach, the merit of a given candidate subset is obtained by learning and84
evaluating a classifier using only the variables included in the proposed subset.85
Once candidate subsets can be scored (by using a filter or wrapper), then86
we can use a large number of search strategies in order to look for an (almost)87
optimal subset. In practice, the following strategies are used:88
• Rankers. Variables are ordered by their individual merit with respect89
4

to the class and the first k are selected. This approach is fast because90
evaluations are simple (univariate) and only n evaluations are required.91
The problem is that no interactions between the variables are taken into92
account and so the result is far from optimal. Also, the selection of the93
value for k is a problem in itself.94
• Sequential. In this approach variables are added (or deleted) one by95
one. The most commonly used approaches are sequential forward selection96
(SFS) and sequential backward selection (SBS) (Kittler, 1978), usually in97
combination with a wrapper evaluator. Both algorithms haveO(n2) worst-98
case complexity, but specially in high-dimensional datasets only SFS is99
used because the evaluations are simpler (fewer variables in the selected100
subset).101
• Metaheuristics. Local and specially global metaheuristics algorithms have102
been used for feature subset selection, e.g. tabu search, evolutionary and103
memetic algorithms (Yang and Honavar, 1998; Inza et al., 2000; Casado-104
Yusta, 2009). As they organize the search in a global manner they usually105
obtain better subsets than the previous strategies, but their computational106
cost makes their use (almost) prohibitive in high-dimensional datasets.107
To our knowledge, this type of algorithms have been applied to some108
microarray datasets (2000-7000 variables) in Blanco et al. (2001), but109
using SFS as an initial step to seed the population. In this study, our110
proposal is to obtain an accurate FSS method requiring few evaluations111
with respect to worst-case quadratic approaches, so we cannot assume the112
use of SFS as an initial step.113
• Incremental. This kind of algorithms is relatively recent and although they114
are also sequential in the sense that variables are added one at a time, the115
behaviour is quite different to SFS or SBS. Thus, at each step, instead of116
5

evaluating O(n) candidate subsets, only 1 (or O(|S|)) candidate subsets117
are evaluated. To do this, a rank is firstly computed for the predictive118
attributes by using a filter measure, and then the algorithm visits the119
variables following the ranking and tries to add (Ruiz et al., 2006; Flores120
et al., 2008) replace (Bermejo et al., 2009) the one being studied to/in121
the candidate subset. The advantage of these methods is that they reduce122
the number of wrapper evaluations while maintaining the accuracy of the123
selected subset, so they are more suitable than previous ones for high-124
dimensional datasets.125
3. Preliminaries on GRASP126
We divide this section into two different parts: first, we introduce the basic127
scheme for GRASP, and then we briefly review some applications of GRASP to128
the FSS problem.129
3.1. Greedy Randomized Adaptive Search Procedure (GRASP)130
The greedy randomized adaptive search procedure (GRASP) is a meta-131
heuristic algorithm commonly applied to combinatorial optimization problems.132
Seminal papers for GRASP are (Feo and Resende, 1989, 1995) while new ad-133
vancements and applications can be found for example in (Resende and Ribeiro,134
2010; Festa and Resende, 2010). There are two clear stages in a GRASP algo-135
rithm:136
1. Construction phase. In this step a specific (deterministic) heuristic for137
solving the target problem is taken as a basis for constructing a solution.138
Thus, starting from the empty set, the algorithm adds elements from all139
the possible candidates until a solution is obtained. However, in GRASP140
some randomness is introduced in this step in order to obtain a greedy141
6

randomized construction method (also known as semi-greedy heuristic).142
Thus, instead of choosing the best element at each step of the construction,143
the algorithm chooses at random from a list of promising ones.144
2. Improving phase. The solution constructed is taken as the starting point145
for a local search in order to get an improved solution.146
GRASP algorithms run the previous two phases a number of times, working147
in this way as a multi-start method. Because of the quality provided to the148
solution by the deterministic greedy heuristic used as a basis, and because of149
the variability introduced by the randomness added to the process, we can150
expect to obtain good starting points but with enough variability, and so the151
multi-start method will eventually find a global optimum.152
3.2. Tackling the FSS problem by using GRASP153
Recently, Casado-Yusta (2009) proposed the use of GRASP for feature se-154
lection and compared it with sequential floating algorithms (SFFS, SBFS (Pudil155
et al., 1994)) and other meta-heuristics such as tabu search, genetic algorithms156
and memetic algorithms. Her conclusion is that tabu search and GRASP out-157
perform the other tested methods. The GRASP algorithm follows the canonical158
design shown above, and bases the constructive phase on the randomized se-159
lection of d attributes according to their in-group variability (a filter measure).160
This process is repeated several times and the subset with the best fitness (com-161
puted by using the nearest neighbour approach) is passed as the starting point162
for the improving step, which is carried out by means of a standard hill-climbing163
algorithm that uses the same fitness measure and that also looks for subsets hav-164
ing exactly d variables. Then, the previous steps are iterated a number of times.165
This approach, though returning good results for GRASP with respect to other166
techniques, is not suitable when dealing with high-dimensional datasets. First,167
as we will see in the experiments, there is a great variability in the number of168
7

variables selected for each dataset, so we cannot fix a number a priori. And sec-169
ond, the number of evaluations (tested candidate subsets) with respect to the170
number of variables is too high to be used with tens of thousands of variables.171
In fact, the experiments in Casado-Yusta (2009) only consider datasets having172
between 18 and 57 variables.173
Based on the idea of Casado-Yusta (2009), Esseghir (2010) has devised a new174
proposal for GRASP-based FSS that uses well-known filter algorithms such as175
Relief (Kira and Rendell, 1992) and FCBF (Yu and Liu, 2003) for the construc-176
tive phase, and also classical wrapper FSS algorithms in the improving step.177
This approach is closer to the one presented here because of the hybridization178
of the filter and wrapper methods. However, the use of standard techniques179
in both phases of GRASP makes the resulting algorithm prohibitive for its use180
in high-dimensional datasets. In fact, the experiments carried out by Esseghir181
(2010) only have 34, 57, 60, 69 and 279 attributes, which is far from the goal of182
this paper.183
Apart from FSS, GRASP has been applied to different data-mining prob-184
lems, such as clustering (Cano et al., 2002) and Bayesian networks learning185
(de Campos et al., 2002).186
4. Incremental Wrapper Subset Selection187
Our proposal is largely based on the use of the Incremental Wrapper Subset188
Selection (IWSS) algorithm (Ruiz et al., 2006; Flores et al., 2008), so we describe189
it before explaining our GRASP-based proposal in the next section.190
The IWSS approach (Ruiz et al., 2006; Flores et al., 2008) works in two191
steps:192
• Filter. It evaluates each variable independently with respect to the class193
8

in order to create a ranking. Symmetrical Uncertainty194
SU(Xi, C) = 2
(
H(C)−H(C|Xi)
H(C) +H(Xi)
)
,
is usually considered, where H() denotes Shannon entropy. Variables are195
then ranked from the highest (best) value to the smallest (worst) one.196
• Wrapper. The selected subset S is initialized with the first variable in the197
ranking, and then the algorithm iteratively tries to include in S the next198
variable Xi in the ranking by evaluating the goodness of that augmented199
subset Saux = S ∪ {Xi}. Evaluation of candidate subsets is done in a200
wrapper way, and if a positive difference is obtained, then Xi is added to201
S and discarded otherwise.202
Example 1. Let us assume a problem with eight predictive attributesX1, . . . , X8.203
Assume also that the following values are computed in the filter step: SU(X1, C) =204
0.9, SU(X2, C) = 0.8, SU(X3, C) = 0.6, SU(X4, C) = 0.5, SU(X5, C) = 0.4, SU(X6, C) =205
0.2, SU(X7, C) = 0.1 and SU(X8, C) = 0.01. Therefore the filter ranking is206
r = X1, X2, . . . , X8. Then, the execution of the wrapper phase is:207
tested tested classifier resulting
step variable subset accuracy decision subset
1 X1 {X1} 0.6 accept |S| = {X1}
2 X2 {X1, X2} 0.7 accept |S| = {X1, X2}
3 X3 {X1, X2, X3} 0.68 reject |S| = {X1, X2}
4 X4 {X1, X2, X4} 0.71 accept |S| = {X1, X2, X4}
5 X5 {X1, X2, X4, X5} 0.71 reject |S| = {X1, X2, X4}
6 X6 {X1, X2, X4, X6} 0.65 reject |S| = {X1, X2, X4}
7 X7 {X1, X2, X4, X7} 0.70 reject |S| = {X1, X2, X4}
8 X8 {X1, X2, X4, X8} 0.75 accept |S| = {X1, X2, X4, X8}
208
209
9
and so, |S| = {X1, X2, X4, X8} is the selected subset.210
�211
With the goal of obtaining more compact subsets and of avoiding overfit-212
ting, in Ruiz et al. (2006) wrapper evaluation is carried out by using a 5-fold213
cross validation, and a t-test (confidence level α = 0.1) that takes as input the214
classification accuracy over the five folds to decide when the inclusion of a new215
variable in S is significant. Of course, the same five folds are used in all the216
wrapper evaluations in order to have fair comparisons. This and other criteria217
were studied in Bermejo et al. (2008), concluding that an appropiate method218
is to use a purely heuristic criterion that pursues the same goals: the inclu-219
sion of a variable is significant if the averaged classification accuracy over the220
5 folds is greater than the current one, with this advantage also holding in k221
of the 5 folds (k = 2 and k = 3 are the values recommended in Bermejo et al.222
(2008)). Therefore, now, the decision of acceptance or rejection of the studied223
variable is not based on a comparison between two numbers (as in Example 1)224
acc(S1) > acc(S2) but between two vectors −→acc(S1) ⊲−→acc(S2), where acc(S) is225
the accuracy of the classifier trained using only S as predictive attributes, and226
−→acc(S) is a vector containing the five accuracies corresponding to five-fold cross227
validation carried out using only S as predictive attributes.228
More formally, the relevance criterion used in this paper (⊲) is defined as229
10

follows:230
−→acc(S1) ⊲−→acc(S2) =
true iff
average(−→acc(S1)) > average(−→acc(S2))
and
count(−→acc(S1)[i] >−→acc(S2)[i]) ≥ k
false otherwise
(1)
Example 2. Let us consider −→acc(S1) = [0.7, 0.72, 0.75, 0.73, 0.69] and −→acc(S2) =231
[0.7, 0.71, 0.72, 0.74, 0.69], then −→acc(S1) ⊲−→acc(S2) is true if k = 2 and false if232
k = 3 because average(−→acc(S1)) = 0.718 > average(−→acc(S1)) = 0.712 and233
count(−→acc(S1)[i] >−→acc(S2)[i]) = 2. However, if we have−→acc(S1) = [0.75, 0.7, 0.7, 0.7, 0.7]234
and−→acc(S2) = [0.7, 0.7, 0.7, 0.7, 0.7] then−→acc(S1)⊲−→acc(S2) is false because average(
−→acc(S1)) >235
average(−→acc(S1)) due to only one of the five folds, and so we can consider that236
this success is due to noise or randomness in the partition.237
�238
The IWSS algorithm is very efficient, and linear in the number of attributes,239
O(n), because it carries out exactly n filter and wrapper evaluations. However,240
it also presents two main disadvantages: (1) it relies on a univariate ranking, so241
some interesting variables can be judged irrelevant/relevant just because some242
others have been judged irrelevant/relevant before; and (2) to be sure all the243
potentially relevant variables have been analyzed, the full ranking must be ex-244
plored. As an example, let us observe Figure 1, where we have plotted, for245
the twelve datasets used in our experiments, the relation between the number246
of variables in the datasets and the position in the SU-based ranking of the247
last variable selected by IWSS. As we can observe, in 8 out of the 12 datasets,248
variables after position 100 (the threshold commonly used by the linear-forward249
algorithm (Gutlein et al., 2009)) are selected, while the same happens in 6 out250
11

of the 12 datasets if we consider the first 10% of the ranking as theshold.251
1
10
100
1000
10000
100000
1 10 100 1000 10000 100000
Pos
ition
in r
anki
ng o
f the
last
sel
ecte
d at
trib
ute
Number of attributes in the dataset
Figure 1: Relation between the number of attributes in the dataset and the position of thelast attribute selected by IWSS.
Disadvantage (1) can be alleviated by using other algorithms that follow the252
incremental behaviour but somehow manage in possible interactions between253
the variables (IWSSr (Bermejo et al., 2009), BARS (Ruiz et al., 2009) and254
SFS (Kittler, 1978)). However, these improved incremental algorithms are more255
complex, with O(n2) worst case complexity (or even worse in the case of BARS),256
though in practice this complexity reduces to a sub-quadratic number of wrapper257
evaluations. Therefore, different approaches are needed to deal with datasets258
having a very large number of attributes.259
5. A GRASP algorithm for FSS in high-dimmensional datasets260
In this section we describe a proposal for the GRASP algorithm that re-261
duces the number of evaluations to be sub-linear with respect to the number of262
attributes (n = |X|) and so it is suitable for solving FSS in high-dimensional263
datasets. We start by discussing the idea or intuition behind the proposed264
algorithm and then provide a detailed description.265
12

5.1. The idea266
As mentioned above, our idea is similar to the one simultaneously proposed267
by Esseghir (2010), that is to use a fast algorithm in the constructive step and a268
more sophisticated one in the improving step. However, given the focus of this269
paper, which deals with datasets having a (very) large number of predictive at-270
tributes, the use of standard filter (wrapper) FSS algorithms in the constructive271
(improving) step is not suitable. Notice that our goal is to drastically reduce272
the number of (wrapper) evaluations carried out, so the straightforward use of273
these standard algorithms several times is not a solution.274
What we propose in this study is to use a standard hybrid algorithm (IWSS)275
for the first phase, but to run it over a small subset of the available variables.276
The subset used in each iteration of the constructive phase is sampled by using277
problem-specific knowledge, specifically by using proportional selection based278
on a (noisy) filter score, e.g. SU(Xi, C) + ǫ, where ǫ is a tiny positive number.279
In this way, more promising variables receive more chance of being selected, but280
even variables marginally independent of C will receive a small chance, because281
they can become (conditionally) relevant given some other variable.282
Regarding the improving step, we also need to reduce the number of available283
variables in this phase. Notice that if, as usual, we start from the solution284
returned by the constructive step, S, and try to improve it by using a local285
search procedure (e.g. hill climbing) that has at its disposal all the n predictive286
attributes, then the requirements of such a local optimizer are too high (exactly287
n wrapper evaluations for each hill climbing step). Therefore, we must think of288
a different way of improving.289
Our idea tackles the problem of the comparison of two different solutions.290
When using incremental FSS algorithms this comparison is easy, because we291
operate in a local way. That is, we need to compare a subset S with S ∪292
13

{Xi}. Then, as the goal of FSS is to reduce the number of variables used while293
maintaining or improving the expected accuracy, the inclusion of Xi only makes294
sense if the accuracy of S ∪ {Xi} is better (using ⊲ criterion, eq. 1) than the295
one of only using S. However, when moving to global search, as it is the case of296
GRASP, we need to compare solutions coming from non-adjacent points in the297
search space, which means setting up the comparison not only by accuracy but298
also by subset cardinality. Therefore, we can tackle the problem as a bi-objective299
one and give the following definition:300
Definition 1. Given two candidate subsets S1 and S2, we say that S1 dominates301
S2 if |S1| ≤ |S2| and −→acc(S1) ⊲−→acc(S2). Otherwise we say that S2 is non-302
dominated by S1.303
Example 3. Let us consider two different solutions sol1 = 〈{X1, X2}, 0.9, (f11 , . . . , f
15 )〉304
and sol2 = 〈{X1, X3, X4}, 0.92, (f21 , . . . , f
25 )〉, where the first component is the305
subset of selected variables, the second one is the average accuracy over the306
five folders, and fji is the accuracy in folder i for solution j. Then, which one307
is better?. Perhaps the correct answer depends on some context, but without308
extra information, neither sol1 dominates sol2 nor does sol2 dominate sol1, so309
it is difficult to decide.310
�311
In our proposal we will maintain a set of non-dominated solutions (NDS)312
found during each search performed in the constructive phase. Thus, each time313
a new solution is provided by the constructive step, we will update NDS by314
using it (function update in Figure 2). Since we can expect solutions inside NDS315
to be of good quality, we make a pool with all the variables contained in the316
non-dominated solutions: Xnds, and the local search used in the constructive317
step will be limited to the use of only variables contained in this set, which318
presents a much lower cardinality than the original set of variables. In this way319
14

we expect to perform very fast local search in the improving step, and also to320
perform well because of the quality of the available variables.321
In NDS: the set of non-dominated solutions.sol: the candidate solution to be studied.
Out true if NDS is modified, false otherwiseparameter NDS is modified
1 If sol is dominated by any solution s ∈ NDS then return false
2 else
3 delete from NDS all solutions dominated by sol4 include sol in NDS5 return true
Figure 2: Auxiliary function update(NDS,sol).
5.2. The algorithm322
The pseudo-code of the proposed algorithm is shown in Figure 3. The next323
three subsections describe it in detail.324
5.2.1. Initialization325
Lines 1-5 account for the initialization part of the algorithm. Specifically, we326
initialize the set of non-dominated solutions (NDS) to be empty, and compute327
the marginal filter score for each variable with respect to the class in lines 2 and328
3. We store the results in scores[] in order to avoid having to re-compute them329
each time a filter score is needed (constructive step). In this study MT(Xi, C)330
corresponds to the computation of SU(Xi, C) over the training set T.331
Lines 4 and 5 compute and store the probability of selection for each vari-332
able using the proportional rule, that is, the typical roulette wheel or fitness333
proportionate selection used in Genetic Algorithms (Goldberg, 1989).334
5.2.2. Constructive step335
Lines 7-16 account for the constructive phase of GRASP. We can divide336
them into two parts: (1) line 7 selects the subset of variables to be used in this337
15

In T: training set; M : filter measure; C classifier algorithm;size number of variables to consider at each iteration;numIt: number of iterations; improving method
Out S // The selected subset
// initialization1 NDS ← ∅2 for each Xi ∈ X
3 scores[i]=MT(Xi, C) + ǫ // e.g. SU(Xi, C) and ǫ = 10−10
4 for each Xi ∈ X // Prob. of selecting each Xi
5 probSel[i]= scores[i]/∑n
j=1scores[j]
// GRASP6 for it=1 to numIt
// constructive step7 subset← sample size variables from X without replacement by using probSel[ ]8 R[ ]← create a rank for variables in subset by using scores[ ]
9 S = {R[1]} // S will contain the solution obtained by IWSS10 BestData = evaluate(C,S,T)11 for i = 2 to R.size()12 Saux = S ∪ {R[i]}13 AuxData = evaluate(C,Saux,T)14 if (AuxData ⊲ BestData) then15 S = Saux16 BestData = AuxData
// improving step17 if (update(NDS,S)) then18 Xnds ← ∪Si∈NDS Si19 S ′ ← runImprovingMethod(Xnds, S, C,T)20 update(NDS,S ′)
21 return all or best solution(s) in NDS
Figure 3: Proposed GRASP algorithm for FSS.
16

iteration according to the selection probabilities stored in probSel[]; (2) lines 8-338
16 are the code of the IWSS algorithm. Thus, each iteration of the constructive339
part corresponds to a randomized execution of IWSS, where the randomization340
comes from the fact that only a subset of sampled variables can be used.341
IWSS starts in line 7 by ranking those variables (subset) according to SU.342
However, because these values have been previously pre-computed and stored343
in scores[] (lines 2 and 3) no new computations are required. Then, it initializes344
the subset of selected variables (S) to the first variable in the ranking R[1] (line345
9) and the goodness of the selected variable to be the evaluation of such a subset346
(line 10). Notice that the call evaluate(C,S,T) corresponds to carrying out a347
5-cross validation for classifier C over dataset T restricted to use only variables348
in S as predictive variables (see Section 4). Therefore, BestData is a vector349
of size 5 containing the accuracy over the 5 test folds used in this inner cross350
validation. Lines 11-16 are the main loop of IWSS as described in Section 4,351
where variables are tested one at a time by following the ranking (lines 12-13)352
and added to S (lines 14-16) only if their inclusion is significant according to ⊲353
criterion (eq. 1).354
At the end of this phase we obtain a pair 〈S, BestData〉 with the selected355
subset and its accuracies from the cross validation.356
5.2.3. Improving step357
Lines 17-20 correspond to the improving phase. Following the idea described358
above, we only take into consideration the solution S returned by the construc-359
tive phase if it is a non-dominated solution, so the improving step starts by360
checking this requirement (line 17). Notice that the call to the update function361
(line 17) returns true if S is a non-dominated solution, and it also modifies362
NDS. If S is dominated by any solution in NDS, we simply skip the improv-363
ing step in this iteration, otherwise the set of available variables (Xnds) for the364
17
local search is constructed as the union in all non-dominated solutions (line 18)365
and a wrapper local-search-based FSS algorithm is used, provided with S as366
starting point, and restricted to the use of only variables included in Xnds (line367
19). Finally, because a new solution is obtained we again update NDS (line368
20).369
In this study we propose different choices for the local-search-based FSS370
procedure:371
• Hill Climbing. We use a classical hill-climbing algorithm, taking as starting372
point the solution S and Xnds as the list of possible attributes. The373
neighbourhood used is made up of all the subsets having the Hamming374
distance equal to 1 with respect to the current solution. In this way, |Xnds|375
is the number of evaluations per iteration during the hill-climbing search.376
• IWSS. The method described in Section 4 and also used in the constructive377
phase (lines 8-16 in Figure 3), but now it is limited to the variables inXnds.378
The number of evaluations is exactly |Xnds|.379
• IWSSr. This algorithm consists of an enhancement of IWSS by adding the380
operation of replacement (Bermejo et al., 2009). Thus, when an attribute381
ranked in position i is analyzed, not only is its inclusion studied but also382
its interchange with any of the variables already included in S. In this383
way, the algorithm can retract some of its previous decisions, that is, a384
previously selected variable can become useless after adding some others.385
As shown in Bermejo et al. (2009), this algorithm obtains more compact386
subsets than IWSS. In the worst case IWSSr will need O(|Xnds|2) eval-387
uations, but in practice the exponent reduces to 1.2-1.3 (Bermejo et al.,388
2009).389
• SFS. The classical Sequential Forward Selection (Kittler, 1978) described390
18

in Section 2.391
• BARS. The Best Agglomerative Ranked Subset (Ruiz et al., 2009) alter-392
nates between the construction of a ranking of the available subsets (ini-393
tially single variables) and a growing heuristic process that obtains all the394
combinations (by merging) of the first three subsets in the ranking with395
each of the remaining ones. After the growing phase, all the subsets with396
worse accuracy than the current best one are pruned. A new ranking is397
created and so on. The worst case complexity of BARS is exponential,398
but in practice it evaluates fewer candidates than IWSSr.399
Notice that in some of these procedures the only input needed is Xnds, while400
in others, such as in Hill Climbing, both the solution to optimize S and the list401
of available variables Xnds are used as input.402
5.3. Discussion403
The complexity, in terms of wrapper evaluations carried out, of the proposed404
GRASP algorithm comes from the following parameters: n, the number of pre-405
dictive variables; m the cardinality of the subset selected for the constructive406
step; k the number of iterations carried out by the grasp algorithm; and, the407
wrapper FSS method selected for the improving step.408
Due to the use of IWSS in the constructive step the algorithm carries out409
exactly k · m wrapper evaluations. That is, by fixing these parameters, the410
number of evaluations is constant regardless of the target dataset. For example,411
if k = 50 and m = 100, then it needs 5000 wrapper evaluations, which is far412
from the number of evaluations required by most of the algorithms used in this413
study, for large datasets.414
Regarding the improving phase, the complexity depends on the method used,415
the number of times it is called, and on the size of Xnds. Thus, worst case416
19

complexity is bounded byO(k·(k·m)2), assuming an FSS method with quadratic417
worst case complexity (e.g. SFS or IWSSr). However, as can be observed in the418
experiments (Section 6), the number of wrapper evaluations carried out in this419
phase is lower than those carried out in the constructive one. Thus, in-practice420
complexity is bounded by O(2 · k ·m), which in the case of datasets with many421
thousands of variables is far lower than the complexity of standard wrapper FSS422
algorithms.423
Apart from complexity there are some other aspects deserving discussion:424
• Randomization of IWSS in the constructive phase has a positive side ef-425
fect (besides being fast): there is room for the selection of variables that426
otherwise would always be discarded. For example, let us suppose that427
our ranking starts with X1, X2, X3, . . . and that in the score assigned428
by the wrapper evaluator the following holds: acc(X1, X2) > acc(X1);429
acc(X1, X2, X3) < acc(X1, X2), and acc(X1, X3) > acc(X1, X2). Then, if430
we consider this ranking, IWSS will always include the suboptimal selec-431
tion (X1, X2) instead of (X1, X3), which is better. However, because of432
the (pseudo)random selection of small subsets, it could happen than X2433
is not selected in some iterations, and so (X1, X3) has its chance.434
• Once the GRASP algorithm finishes, we obtain a set of solutions instead435
of a single one, so we can choose between returning all of them and letting436
the user decide which one to use depending on the application context, or437
we can directly choose one and return it. In this paper, and in order to438
compare with standard algorithms that only return one solution, we have439
taken a criterion that benefits small subsets but without compromising440
accuracy. Specifically we use the following procedure: (1) rank (from441
lowest to highest) the solutions in NDS by using the number of selected442
attributes; (2) select the first solution in the ranking as best; and (3) run443
20

over the ranking and replace best by the solution currently analyzed only444
if it is better according to ⊲ criterion. Of course, accuracies are computed445
with respect to the corresponding folder of the training set, so it is possible446
that such a high performance is biased (overfitted), resulting in a worse447
performance when applied to the test set, but this fact also happens in448
the rest of the (wrapper) FSS methods.449
6. Experiments450
In this section we experimentally test our proposal over a set of high-dimensional451
datasets. Besides analyzing the different FSS algorithms, we propose to imple-452
ment the improving phase, and a comparison of the resulting GRASP with453
state-of-the-art algorithms is also provided.454
6.1. Methodology and Test Suite455
In pursuit of our goal of dealing with high-dimensional datasets, and in order456
to obtain reliable conclusions, we selected 12 publicly-obtained datasets com-457
monly used in the literature (Table 1): seven microarrays related to cancer pre-458
diction (Colon, Leukemia, Lymphoma, GCM, DLBCL-Stanford, ProstateCan-459
cer and LungCancer-Harvard2) and five datasets used in the NIPS 2003 feature460
selection challenge (Arcene, Madelon, Dorothea, Dexter and Gisette). The first461
four microarray datasets can be downloaded from http://www.upo.es/eps/aguilar/data-462
sets.html while the last three are available at http://sdmc.i2r.a-star.edu.sg/rp/.463
Datasets from the feature selection challenge can be obtained from the web page464
of NIPS 2003. In all of them, there is a range between 500-100000 predictive465
attributes and 47-6000 instances.466
With respect to FSS subset selection algorithms, taking into account that467
wrapper evaluation is used, and the high cardinality of the datasets, we use468
the following six state-of-the-art algorithms as a baseline for comparison: IWSS469
21

Dataset #Features #Instances Dataset #Features #Instances
Colon 2000 62 Leukemia 7129 72
Lymphoma 4026 96 DLBCL 4026 47
Prostate 12600 136 Lung 12533 181
GCM 16063 190 Arcene 10000 100
Madelon 500 2000 Dorothea 100000 800
Dexter 20000 300 Gisette 5000 6000
Table 1: Number of attributes and instances in the datasets used.
(Ruiz et al., 2006; Flores et al., 2008), IWSSr (Bermejo et al., 2009), BARS470
(Ruiz et al., 2009), Linear Forward Selection (LFS) (Gutlein et al., 2009), Fast471
Correlation-Based Filter (FCBF) (Yu and Liu, 2003) and Principal Component472
Analysis (PCA) (Jolliffe, 1986). LFS is an application of SFS in the case of473
high-dimensional datasets with the goal of saving wrapper evaluations. Thus,474
the attributes are ranked by using a filter score (e.g. SU) and then only the first475
k (k=100 by default) are used as input for the SFS algorithm. Finally, FCBF476
and PCA are two well-known filter selection algorithms which are used for the477
sake of completeness in our study. With respect to our proposal, we test five478
different instances of the GRASP algorithm depending on the method selected479
for the improving step: HC, IWSS, IWSSr, SFS and BARS.480
In the experiments, all the filter evaluations were performed using Symmet-481
rical Uncertainty (SU) and for wrapper evaluation we selected the Naive Bayes482
(NB) algorithm (Duda and Hart, 1973). The reason is two-fold: first, NB is483
known to be quite sensitive to the presence of redundant and irrelevant predic-484
tive attributes, so it is a clear candidate to test FSS; and second, preliminary485
experiments with other classifiers (decision trees and nearest neighbours) have486
been carried out and the same conclusions were obtained, so for the sake of487
clarity and conciseness, only the results for NB are shown here.488
22

6.2. Results489
The algorithms IWSS and IWSSr do not need parameters. For the algorithm490
LFS we use the code in WEKA (Hall et al., 2009) and follow the recommenda-491
tions in Gutlein et al. (2009) (fixed-set with k=100). In the case of BARS we492
use the values recommended by the authors in Ruiz et al. (2009): k=3 (number493
of subsets used as seed to form candidates by combination with the remaining494
ones in the ranking) and ℓ=50% (percentage of the rank to be explored). How-495
ever, when BARS is used in the improving stage of our GRASP algorithm, ℓ is496
set to 100% since the search is run over just a few attributes.497
498
Regarding GRASP parameters, we carried out some preliminary tests with499
different values, and in this study we report the results with subset size equal500
to 100, while two different values (50 and 100) were tested for the number of501
iterations (multi-starts). The value of subset size can be tuned for each dataset,502
but our goal is to carry out experimentation showing that the results can be503
generalized to a wide range of datasets without needing specific tuning. In fact,504
the tested values are too large for the smallest datasets (Madelon and Colon),505
but we maintain them in the test suite for coherence with previous research.506
6.2.1. Experiment 1.-507
Table 2 shows the results obtained when running the six deterministic algo-508
rithms: IWSS, IWSSr, LFS, BARS, FCBF and PCA. In all cases we report the509
average over a 10-fold cross validation for accuracy, number of selected variables510
and number of wrapper evaluations. From the results, and before going into a511
deeper analysis, it is clear that LFS obtains more compact subsets, needs far512
fewer evaluations, but also obtains the worst accuracy (see statistical tests in513
Table 4). Of course, if we increase the percentage of the rank considered, these514
values would be considerably modified, but as shown in Figure 1, the problem is515
23

that we do not know in advance the correct percentage of the rank to be used. In516
the limit it is clear that LFS behaves like SFS, which is comparable in accuracy517
to IWSSr, but obtains less compact subsets and needs more wrapper evaluations518
(Bermejo et al., 2009). With regards to IWSS, it needs fewer evaluations than519
IWSSr and BARS but includes more features in the selected subset. Regarding520
IWSSr and BARS, the latter needs fewer evaluations and obtains more com-521
pact subsets. However, we must recall that BARS only explores half the ranking522
while IWSSr explores all the variables. If all the variables in the rank are used523
as input in BARS, then the number of evaluations significantly increases (notice524
that BARS explores 3v subsets just in its first iteration, v being the number525
of attributes considered). With respect to the two filter algorithms used, PCA526
requires such a large amount of memory resources that the experiment could527
not be finished for three of the databses. However, for the complete databases528
and for values obtained in FCBF, it is clear that these two filter algorithms tend529
to perform worse in terms of accuracy and to select many more attributes than530
the wrapper selection algorithms. Finally, we can also observe that the Gisette531
dataset is a sort of outlier, because of the number of variables IWSS and IWSSr532
select in that case.533
6.2.2. Experiment 2.-534
With regards to our proposed GRASP algorithm, assuming (from prelimi-535
nary experiments) that 100 is an adequate subset size, we first investigate its536
performance by allowing it to do 50 iterations (or multi starts). Table 3 shows537
the results obtained when considering the five improving methods described in538
Section 5.2.3. Now, we show the same statistics as before, but also the number539
of non-dominated solutions found in each case. Furthermore, because of the540
stochastic nature of GRASP, the numbers now correspond to the average over541
10 independent runs, each one using a 10-fold cross validation.542
24

Dataset IWSS IWSSr LFS BARS FCBF PCA
Acc Atts Acc Atts Acc Atts Acc Atts Acc Atts Acc Atts
Colon 80.65 3.8 83.87 2.8 83.87 4.1 85.71 3 77.42 14.6 72.58 28.9
Leukemia 87.50 2.5 87.50 2 93.06 3.2 90.54 2.3 95.83 45.8 79.17 53.8
Lymphoma 76.04 8.8 80.21 5.9 79.17 7.4 73.67 6.1 78.13 291 83.33 63.9
DLBCL 85.11 1.9 80.85 1.8 89.36 3.6 76.00 2.4 97.87 49.9 70.21 34.3
Prostate 77.94 11.1 78.68 7 75.74 4.5 86.81 3.7 61.03 35.8 57.35 36.6
Lung 97.24 2.7 97.24 2.4 96.69 2.5 98.36 3 99.45 115.2 85.61 125.2
GCM 64.21 36.6 59.47 19.9 52.63 10.9 60.00 15.9 68.95 57.1 – –
Arcene 70.00 13.4 72.00 6.2 73.00 4.5 74.00 4.9 70.00 34.2 – –
Madelon 59.85 13.3 60.50 8 60.45 4.6 60.30 5.8 61.75 4.6 55.55 413.8
Dorothea 93.50 7.4 92.88 6.3 92.38 5.5 93.88 7.3 92.63 92.8 – –
Dexter 81.00 19.6 83.00 12.9 81.67 12.4 82.67 12.8 86.00 34.3 66.67 244.4
Gisette 94.68 112.6 94.07 30.7 89.77 6.9 93.10 13.6 88.03 30.4 89.62 2405.5
Mean 80.64 19.5 80.85 8.8 80.65 5.8 81.25 6.7 81.42 67.1 – –
Number Of Wrapper Evaluations
Colon 2000.0 7276.5 497.9 5578.4 0 0
Leukemia 7129.0 21378.4 413.0 14541.0 0 0
Lymphoma 40260.0 27663.0 806.8 15576.0 0 0
DLBCL 4026.0 11134.0 451.1 9476.9 0 0
Prostate 12600.0 94507.8 535.7 22578.8 0 0
Lung 12533.0 42603.5 345.5 24658.1 0 0
GCM 16063.0 309750.4 1121.5 69223.7 0 0
Arcene 10000.0 67359.3 533.5 23785.9 0 0
Madelon 500.0 3818.0 546.2 1403.1 0 0
Dorothea 100000.0 441346.2 630.5 203418.0 0 0
Dexter 20000.0 255027.3 1231.5 31153.7 0 0
Gisette 5000.0 137050.7 758.7 9452.2 0 0
Mean 19175.9 118242.9 656.0 35903.8 0 0
Table 2: Results for the use of six deterministic FSS algorithms (4 wrapper and 2 filter).
6.2.3. Experiment 3.-543
Here we investigate whether allowing the algorithm to do a larger number544
of iterations (multi-starts) introduces a significant improvement. We repeated545
the same experiments but fixed the number of multi-starts to 100 instead of 50.546
The conclusions are the same as those obtained with 50 iterations so we do not547
show the results for the sake of clarity. Besides, since increasing the number of548
iterations increases the number of wrapper evaluations, it is clear than 50 is a549
more appropiate value than 100 iterations.550
6.3. Statistical Analysis551
Statistical tests were performed in order to compare the results obtained552
when running 9 different algorithms: 4 deterministic and our GRASP proposal553
with the five tested improving methods. In order to be in a position to draw554
25

Dataset HC IWSS IWSSr BARS SFS
Acc Atts Acc Atts Acc Atts Acc Atts Acc AttsColon 81.13 3.0 79.68 3.4 82.26 3.1 80.00 2.9 80.00 3.5Leukemia 92.64 2.7 93.75 2.7 91.67 2.8 93.33 2.8 93.61 3.3Lymphoma 74.90 6.1 77.40 7.5 77.29 6.8 76.35 6.8 78.75 7.5DLBCL 86.17 2.2 86.60 2.3 87.02 2.1 85.74 2.2 87.66 2.5Prostate 77.87 5.0 78.68 5.7 77.50 4.6 78.60 5.1 78.16 5.6Lung 95.69 2.2 95.08 2.2 95.75 2.4 96.02 2.3 96.02 2.4GCM 55.95 11.7 58.63 19.4 53.63 14.1 57.42 13.3 57.53 20.5Arcene 80.00 5.7 79.30 6.0 78.50 5.7 79.00 5.2 79.30 6.3Madelon 60.85 7.6 60.90 7.2 60.85 7.2 60.50 7.6 60.80 7.9Dorothea 93.36 3.7 93.35 4.2 92.99 3.8 93.50 5.0 93.23 4.4Dexter 83.47 15.7 83.27 15.5 83.37 15.6 83.07 15.6 83.10 15.8Gisette 93.06 15.9 94.45 63.3 92.17 31.9 92.41 26.3 93.39 34.1Mean 81.26 6.8 81.76 11.6 81.08 8.3 81.33 7.9 81.80 9.5
Number Of EvaluationsColon 5065.2 5018.6 5053.6 5081.3 5013.7Leukemia 5472.0 5117.5 5333.3 5761.9 5173.9Lymphoma 5608.6 5287.9 6076.6 7343.4 5411.8DLBCL 5206.1 5063.2 5152.6 5272.9 5064.8Prostate 5252.4 5135.5 5283.2 5361.3 5248.8Lung 5940.1 5243.6 5802.5 6781.9 5397.2GCM 6150.9 5519.6 7090.1 8669.2 7632.9Arcene 5524.3 5203.3 5649.4 5755.4 5392.6Madelon 5076.8 5016.9 5059.9 5083.8 5004.4Dorothea 5172.2 5075.9 5227.2 5502.8 5147.5Dexter 5543.2 5061.8 5421.7 5760.3 5019.5Gisette 7206.2 6549.3 10437.5 11511.7 9651.9Mean 5601.5 5274.4 5965.6 6490.5 5763.3
Number Of Non-Dominated SolutionsColon 3.0 2.7 2.7 3.0 3.1Leukemia 6.7 6.7 6.4 6.7 6.8Lymphoma 4.2 5.7 5.6 5.4 6.4DLBCL 5.9 6.0 6.1 6.2 6.1Prostate 4.2 5.2 4.0 4.6 5.0Lung 9.0 9.4 9.6 9.5 9.7GCM 3.4 7.1 5.0 4.1 7.2Arcene 5.2 6.1 5.5 5.1 6.9Madelon 2.2 2.4 2.5 2.6 1.4Dorothea 4.4 4.4 4.2 5.3 5.4Dexter 3.9 3.1 3.8 4.6 3.1Gisette 4.1 14.3 7.9 7.2 6.9Mean 4.7 6.1 5.3 5.3 5.7
Table 3: Mean Results for the Grasp-based FSS algorithm with numIt = 50.
26

significant conclusions, we use a multiple-algorithms multiple-datasets compar-555
ison by using the Friedman test (Friedman, 1937) followed by a post-hoc Holm556
test (Holm, 1979), as suggested in Demsar (2006) and using the code provided557
in Garcia and Herrera (2008). In all the cases we set the confidence level to558
the standard value α = 0.05. Please note that we do not include the results559
obtained with PCA and FCBF in the experiments because PCA could not be560
completed for all datasets and because of the huge cardinality of FCBF selected561
subsets.562
563
We performed the analysis in three stages. At each stage, a different param-564
eter is analyzed and only the algorithms considered non-different to the control565
one (marked with the • symbol) passed to the following stage. The three stages566
are:567
1. First, the accuracy of the algorithms is compared. That is, we are not568
interested in an algorithm that is too fast or that selects compact subsets,569
but in the price of degrading the classification accuracy.570
2. Second, the cardinality of the selected subsets is compared. Once accuracy571
has been guaranteed, then we prefer algorithms selecting more compact572
attribute subsets.573
3. Finally, we compare the number of wrapper evaluations required by each574
algorithm.575
Table 4 shows the results of the analysis for numIt equals 50. The three rows576
correspond to the three stages previously described. Deterministic algorithms577
are denoted by their name in boldface, while for the GRASP approach (five578
furthest right columns) its different implementations are denoted by the name579
of the FSS algorithm used in the improving phase, followed by a ∗ superscript.580
581
27

Stage IWSS IWSSr LFS BARS HC∗ IWSS∗ IWSSr∗ BARS∗ SFS∗
Acc 80.64 80.85 80.65 81.25 81.26 •81.76 81.08 81.33 81.80Atts 19.5 8.8 6.7 •6.8 11.6 8.3 7.9 9.5Evals 118242.9 35903.8 •5601.4 5965.6 6490.5
Table 4: Statistical Tests.
From the table, the conclusions are quite clear:582
• None of the instances of the GRASP algorithm can be discarded by accu-583
racy.584
• LFS is the worst algorithm in accuracy.585
• Using SFS and IWSS in the improving stage yields larger selected subsets586
than the remaining algorithms.587
• With respect to the number of evaluations, the GRASP approaches clearly588
improve IWSSr and BARS.589
• Among the three surviving GRASP-approaches (HC∗, BARS∗ and IWSSr∗),590
the last two came out as significantly worse in the tests when using the591
number of wrapper evaluations as a parameter. This may seem strange592
considering the behaviour of BARS when used as a deterministic algo-593
rithm, but it has a clear explanation. The good performance of BARS594
with respect to the number of evaluations is due to the pruning of subsets595
that are worse than the current best, but now the pool of available at-596
tributes is made up of very good attributes (those in the non-dominated597
solutions), therefore the subsets created by using these attributes are also598
very good and only a few of them are pruned, increasing in this way the599
number of evaluations carried out by BARS in the improving stage.600
It is also worth remarking that the cases in which GRASP(HC∗) needs more601
iterations (GCM and Gisette) are also those cases in which the use of HC as the602
28

improving method obtains better results with respect to the cardinality of the603
selected subset. The quality (low number of variables) in these two cases also604
has an impact on the existence of a small number of non-dominated solutions.605
Therefore, our recommendation is to use the GRASP algorithm with 50 itera-606
tions or multi-starts, and to use HC as the improving method.607
For the sake of completness, Table 5 shows the Correlation-based Feature Subset608
(CFS) metric (Hall, 1998) computed for the feature subsets selected by each of609
the filter and wrapper selection algorithms used in this work. For our GRASP610
proposal we use the best configuration found (numIt=50 and HC∗). The CFS611
metric computes the worth of a subset of attributes by considering the indi-612
vidual predictive ability of each feature along with the degree of redundancy613
between them.614
Dataset No Selection IWSS IWSSr BARS LFS FCBF PCA HC∗
Colon 0.124 0.360 0.325 0.325 0.253 0.243 0.149 0.283
Leukemia 0.088 0.492 0.600 0.600 0.558 0.302 0.076 0.516
Lymphoma 0.239 0.543 0.516 0.337 0.520 0.285 0.183 0.449
DLBC 0.261 0.509 0.467 0.424 0.661 0.371 0.238 0.494
Prostate 0.042 0.146 0.159 0.181 0.265 0.070 0.052 0.205
LungCancer 0.106 0.804 0.757 0.690 0.710 0.379 0.045 0.743
GCM 0.251 0.462 0.453 0.449 0.608 0.346 – 0.465
ARCENE 0.027 0.048 0.016 0.174 0.117 0.053 – 0.072
MADELON 0.001 0.006 0.009 0.004 0.009 0.015 0.000 0.010
DOROTHEA 0.014 0.305 0.278 0.290 0.206 0.051 – 0.296
DEXTER 0.000 0.063 0.043 0.059 0.055 0.026 0.015 0.076
GISETTE 0.010 0.121 0.064 0.219 0.428 0.118 0.001 0.211
Mean 0.097 0.322 0.307 0.313 0.366 0.188 – 0.319
Table 5: CFS merit of selected subsets.
As can be seen, there is no special difference among wrapper selection algo-615
rithms for this filter metric, but at least it is clear that wrapper feature selection616
increases CFS when compared to not performing any selection or using a filter617
search such as FCBF (which indeed uses the CFS metric) or PCA.618
6.4. Complexity Order and Selection CPU Time619
For the sake of completeness, we have used the number of evaluations of620
the 9 tested wrapper algorithms over the 12 datasets used to estimate their621
29
in-practice complexity order O(nx). The value of x has been computed as the622
one minimizing the mean square error with respect to the actual number of623
evaluations for the 12 datasets.624
With respect to the deterministic wrapper algorithms, leaving out IWSS,625
which is linear, and LFS, which is sub-linear but whose complexity is con-626
trolled by the portion of attributes used, it is interesting to see that IWSSr627
and BARS, whose worst case complexity is quadratic and exponential respec-628
tively, have a better behaviour in practice with O(n1.13) and O(n1.06), respec-629
tively. With respect to the GRASP algorithms, the number of evaluations is630
numIt · subsetSize + ǫ, ǫ being the number of evaluations carried out in the631
improving stage. Anyway, for comparison reasons we also estimate their com-632
plexity order O(nx) and in all the cases the fitted complexity is sub-linear,633
specifically x is between 0.76 and 0.87.634
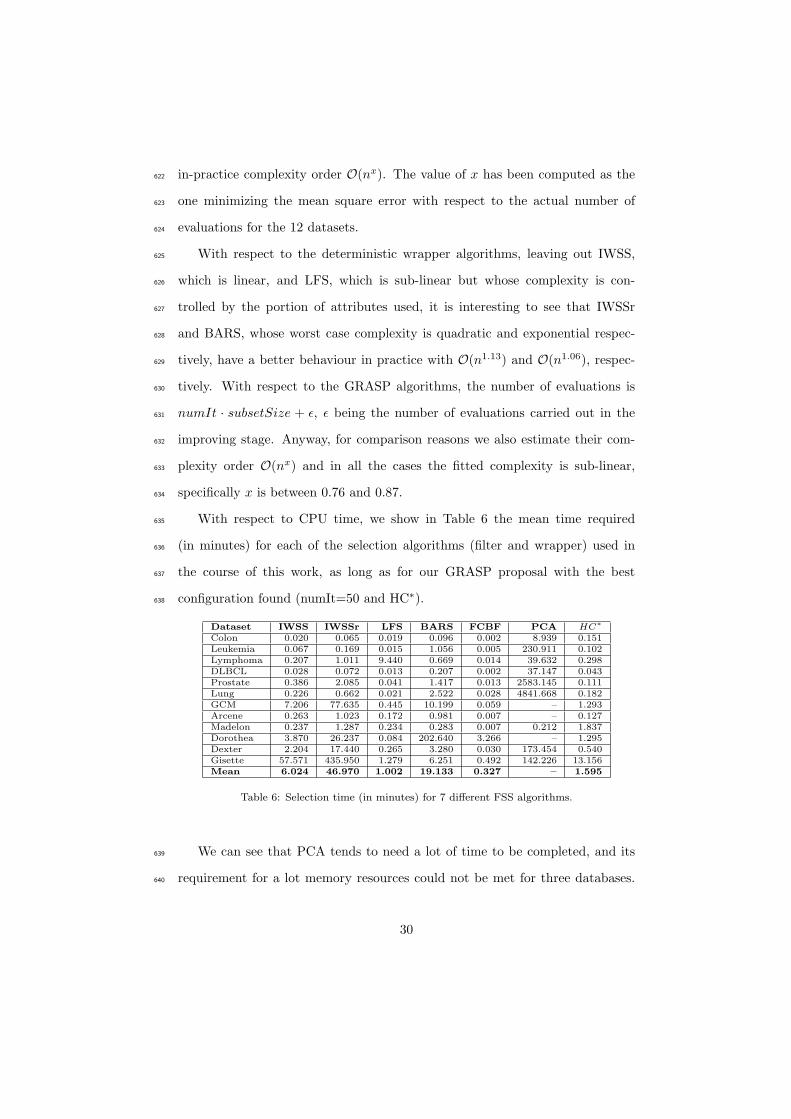
With respect to CPU time, we show in Table 6 the mean time required635
(in minutes) for each of the selection algorithms (filter and wrapper) used in636
the course of this work, as long as for our GRASP proposal with the best637
configuration found (numIt=50 and HC∗).638
Dataset IWSS IWSSr LFS BARS FCBF PCA HC∗
Colon 0.020 0.065 0.019 0.096 0.002 8.939 0.151
Leukemia 0.067 0.169 0.015 1.056 0.005 230.911 0.102
Lymphoma 0.207 1.011 9.440 0.669 0.014 39.632 0.298
DLBCL 0.028 0.072 0.013 0.207 0.002 37.147 0.043
Prostate 0.386 2.085 0.041 1.417 0.013 2583.145 0.111
Lung 0.226 0.662 0.021 2.522 0.028 4841.668 0.182
GCM 7.206 77.635 0.445 10.199 0.059 – 1.293
Arcene 0.263 1.023 0.172 0.981 0.007 – 0.127
Madelon 0.237 1.287 0.234 0.283 0.007 0.212 1.837
Dorothea 3.870 26.237 0.084 202.640 3.266 – 1.295
Dexter 2.204 17.440 0.265 3.280 0.030 173.454 0.540
Gisette 57.571 435.950 1.279 6.251 0.492 142.226 13.156
Mean 6.024 46.970 1.002 19.133 0.327 – 1.595
Table 6: Selection time (in minutes) for 7 different FSS algorithms.
We can see that PCA tends to need a lot of time to be completed, and its639
requirement for a lot memory resources could not be met for three databases.640
30

FCBF is the fastest of all due to its filter nature, but as was seen in Table641
2, it also selects a huge number of attributes. So the two fastest wrapper FSS642
algorithms are LFS and our GRASP proposal which, as Table 4 shows, performs643
better than LFS.644
7. Conclusions and Future Work645
In this paper we have presented a GRASP-based algorithm for feature subset646
selection in high-dimensional datasets. The main goal is to maintain the perfor-647
mance (accuracy and degree of reduction in the number of selected attributes)648
with respect to other state-of-the-art FSS algorithms designed for this problem,649
but with the advantage of needing a significantly smaller number of wrapper650
evaluations. To do this, our GRASP algorithm only uses a small fraction of the651
available attributes in each iteration, which are selected in a pseudo-random652
way, that is, more promising attributes have more chance of being selected. An-653
other novelty lies in the improving stage, which instead of only improving the654
last solution, forces cooperation between all the previously found non-dominated655
solutions by creating a common pool with the variables they contain and running656
an FSS algorithm over them. As a result, we have obtained a highly-competitive657
algorithm for this problem which maintains the performance of state-of-the-art658
deterministic algorithms but in a sub-linear number of wrapper evaluations.659
From the different GRASP instances tested, we recommend the use of those660
running hill climbing or IWSSr in the improving stage.661
An open line of research is to exploit the fact that our algorithm can return662
just one solution, but a set of non-dominated ones. Also, we plan to extend this663
idea to other meta-heuristic algorithms.664
31

Acknowledgments665
This work has been partially supported by the JCCM under project PCI08-666
0048-8577, MEC under project TIN2007-67418-C03-01 and FEDER funds.667
References668
Aha, D. W., Kibler, D., Albert, M. K., 1991. Instance-based learning algorithms.669
Machine Learning 6 (1), 37–66.670
Bermejo, P., Gamez, J., Puerta, J., 2008. On incremental wrapper-based at-671
tribute selection: experimental analysis of the relevance criteria. In: IPMU’08:672
Proceedings of the 12th Intl. Conf. on Information Processing and Manage-673
ment of Uncertainty in Knowledge-Based Systems.674
Bermejo, P., Gamez, J. A., Puerta, J. M., 2009. Incremental wrapper-based675
subset selection with replacement: An advantageous alternative to sequential676
forward selection. In: Proceedings of the IEEE Symposium Series on Com-677
putational Intelligence and Data Mining (SSCI CIDM-2009). pp. 367–374.678
Bishop, C. M., 1995. Neural Networks for Pattern Recognition. Oxford Univer-679
sity Press.680
Blanco, R., Larranaga, P., Inza, I., Sierra, B., 2001. Selection of highly accurate681
genes for cancer classification by estimation of distribution algorithms. In:682
Proceedings of the Workshop of Bayesian Models in Medicine (at AIME-01).683
pp. 29–34.684
Boser, B. E., Guyon, I. M., Vapnik, V. N., 1992. A training algorithm for optimal685
margin classifiers. In: COLT ’92: Proceedings of the fifth annual workshop686
on Computational learning theory. ACM, pp. 144–152.687
32

Cano, J. R., Oscar, C., Fracisco, H., Sanchez, L., 2002. A GRASP algorithm688
for clustering. In: Advances in Artificial Intelligence IBERAMIA 2002. Vol.689
2527 of LNCS. Springer Berlin / Heidelberg, pp. 214–223.690
Casado-Yusta, S., 2009. Different metaheuristic strategies to solve the feature691
selection problem. Pattern Recognition Letters 30 (5), 525–534.692
de Campos, L. M., Fernandez-Luna, J. M., Puerta, J. M., 2002. Local search693
methods for learning bayesian networks using a modified neighborhood in the694
space of dags. In: Advances in Artificial Intelligence IBERAMIA 2002. Vol.695
2527 of LNCS. Springer Berlin / Heidelberg, pp. 182–192.696
Demsar, J., 2006. Statistical comparisons of classifiers over multiple data sets.697
Journal of Machine Learning Research 7, 1–30.698
Duda, R., Hart, P., 1973. Pattern Classification and Scene Analysis. John Wiley699
and Sons.700
Esseghir, M. A., 2010. Effective wrapper-filter hybridization through grasp701
schemata. In: MLR Workshop and Conference Proceedings. Volume 10: Fea-702
ture Selection in Data Mining. pp. 45–54.703
Feo, T. A., Resende, M. G., March 1995. Greedy randomized adaptive search704
procedures. Global Optimization 6 (2), 109–133.705
Feo, T. A., Resende, M. G. C., 1989. A probabilistic heuristic for a computa-706
tionally difficult set covering problem. Operations Research Letters 8 (2), 67707
– 71.708
Festa, P., Resende, M. G., 2010. Effective application of GRASP. In: Lokketan-709
gen, A. (Ed.), Wiley Encyclopedia of Operations Research and Managemente710
Science. Wiley & Sons.711
33

Flores, J., Gamez, J. A., Mateo, J. L., 2008. Mining the esrom: A study of712
breeding value classification in manchego sheep by means of attribute selection713
and construction. Computers and Electronics in Agriculture 60 (2), 167–177.714
Friedman, M., 1937. The use of ranks to avoid the assumption of normality715
implicit in the analysis of variance. Journal of the American Statistical Asso-716
ciation 32, 675–701.717
Garcia, S., Herrera, F., 2008. An extension on ”statistical comparisons of classi-718
fiers over multiple data sets” for all pairwise comparisons. Journal of Machine719
Learning Research 9, 2677–2694.720
Goldberg, D. E., 1989. Genetic Algorithms in Search, Optimization and Machine721
Learning. Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA.722
Gutlein, M., Frank, E., Hall, M., Karwath, A., 2009. Large-scale attribute se-723
lection using wrappers. In: Symposium on Computational Intelligence and724
Data Mining (CIDM). pp. 332–339.725
Guyon, I., Elisseeff, A., 2003. An introduction to variable and feature selection.726
Journal of Machine Learning Research 3, 1157–1182.727
Hall, M., Frank, E., Holmes, G., Pfahringer, B., Reutemann, P., Witten, I. H.,728
2009. The weka data mining software: an update. SIGKDD Exploration729
Newsletter 11 (1), 10–18.730
Hall, M. A., 1998. Correlation-based feature subset selection for machine learn-731
ing. Ph.D. thesis, University of Waikato, Hamilton, New Zealand.732
Holm, S., 1979. A simple sequentially rejective multiple test procedure. Scandi-733
navian Journal of Statistics 6, 65–70.734
34

Inza, I., Larranaga, P., Etxeberria, R., Sierra, B., 2000. Feature subset selection735
by bayesian network-based optimization. Artifical Intelligence 123 (1-2), 157–736
184.737
Jolliffe, I., 1986. Principal Component Analysis. Springer Verlag.738
Kira, K., Rendell, L., 1992. A practical approach to feature selection. In: 9th739
International Workshop on Machine Learning(ML’92). pp. 249–256.740
Kittler, J., 1978. Feature set search algorithms. Pattern Recognition and Signal741
Processing, 41–60.742
Liu, H., Motoda, H., 1998. Feature Selection for Knowledge Discovery and Data743
Mining. Kluwer Academic Publishers.744
Pudil, P., Novovicova, J., Kittler, J., 1994. Floating search methods in feature745
selection. Pattern Recognition Letters 15 (10), 1119–1125.746
Quinlan, J., 1986. Induction of decision trees. Machine Learning 1, 81–106.747
Resende, M., Ribeiro, C., 2010. Greedy Randomized Adaptive Search Proce-748
dures: Advances, Hybridizations and Applications. In Handbook of Meta-749
heuristics, Chapter 10. Springer.750
Ruiz, R., Aguilar, J. S., Riquelme, J., 2009. Best agglomerative ranked subset751
for feature selection. In: JMLR: Workshop and Conference Proceedings vol.752
4 (New Challenges for feature selection). pp. 148–162.753
Ruiz, R., Riquelme, J. C., Aguilar-Ruiz, J. S., 2006. Incremental wrapper-based754
gene selection from microarray data for cancer classification. Pattern Recog-755
nition 39, 2383–2392.756
Webb, G. I., Boughton, J. R., Wang, Z., 2005. Not so naive bayes: aggregating757
one-dependence estimators. Machine Learning 58 (1), 5–24.758
35

Yang, J., Honavar, V., 1998. Feature subset selection using a genetic algorithm.759
IEEE Intelligent Systems 13 (2), 44–49.760
Yu, L., Liu, H., 2003. Feature selection for high-dimensional data: A fast761
correlation-based filter solution. pp. 856–863.762
36
Related Documents











