A Design of Automatic Dish-Antenna Positioning System for Receiving Geo-Satellites Signals EMAD ADDEEN ABDUL GABBAR MOHAMMED ALHASAN OSMAN M.Sc in Computer Engineering and Networks, University of Gezira, 2006. A Thesis Submitted to the University of Gezira in Fulfillment of the Requirements for Award of the Degree of Doctor of Philosophy in Telecommunication Engineering Department of Electronics Engineering Faculty of Engineering and Technology May/2018

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
A Design of Automatic Dish-Antenna Positioning System for
Receiving Geo-Satellites Signals
EMAD ADDEEN ABDUL GABBAR MOHAMMED ALHASAN OSMAN
M.Sc in Computer Engineering and Networks, University of Gezira, 2006.
A Thesis
Submitted to the University of Gezira in Fulfillment of the Requirements for
Award of the Degree of Doctor of Philosophy
in
Telecommunication Engineering
Department of Electronics Engineering
Faculty of Engineering and Technology
May/2018
ii
A Design of Automatic Dish-Antenna Positioning System for
Receiving Geo-Satellites Signals
EMAD ADDEEN ABDUL GABBAR MOHAMMED ALHASAN OSMAN
Supervision Committee
Name Position Signature
Dr. Abdullahi Akode Othman Main Supervisor ……………….
Dr. Magdi Baker Mahmoud Amien
Co-supervisor ………………
May/2018
iii
A Design of Automatic Dish-Antenna Positioning System for
Receiving Geo-Satellites Signals
EMAD ADDEEN ABDUL GABBAR MOHAMMED ALHASAN OSMAN
Examination Committee:
Name Position Signature
Dr. Abdullahi Akode Othman Chair Person …………………….
Prof. Khalid Hamid Bilal Abdallah External Examiner …………………….
Dr. Sally Dafa-Allah Awadelkriem Internal Examiner …………………….
Date of Examination: 13/May/2018
iv
ACKNOWLEDGEMENTS
I express my deep thanks to my GOD ALLAH for
giving me the ability to complete this work.
Grateful to my supervisor Dr. Abdullahi Akode
Othman.
Grateful to my co-supervisor Dr. Magdi Baker
Mahmoud Amien.
v
DEDICATION
This research is dedicated to
My father.
The soul of my mother.
My brothers and sisters.
My beloved wife.
My son Mohammed and daughters; Ragad and Rafa.
All my dear; friends and colleagues.

vi
A Design of Automatic Dish-Antenna Positioning System for
Receiving Geo-Satellites Signals
EMAD ADDEEN ABDUL GABBAR MOHAMMED ALHASAN OSMAN
ABSTRACT
Geostationary satellite is a professional way to increase the TV broadcasting coverage. In
some times the site maybe within a coverage area of different satellites. To enjoy the services
provided by these satellites, a positioning system must be used to navigate between these
satellites directing the dish-antennas to the intended satellite in a short time with high
precision. Previous studies in dish-antenna positioning problem considered two factors
(azimuth and elevation) using different methods and techniques. In this research the
polarization factor was also considered. The research aims to design a dish-antenna
positioning system that allows the navigation between satellites using an easy-to-use and
effective remote-control positioning system. The designed system uses the antenna site data
(latitude, longitude) and the intended sub-satellite point (longitude) as inputs. Then it
calculates the azimuth and elevation as well as polarization angles and transforms the
calculated angles to real angles by using stepper-motors to direct the dish-antenna to the
intended satellite. The positioning system was developed and verified in two main phases. In
the first phase a mathematical model was generated based on assumption and the calculation
sequence stated above. In this phase a general relationship between stepper motor and the dish
antenna was developed to improve the positioning system efficiency. The second step in the
first phase was mathematical model simulation and validation. In the second phase the
simulated mathematical model was transformed into a real model. The real model designed
consists of two parts, software design and hardware design, based on microcontroller Arduino
Uno card, stepper-motors and IR-remote control which was used for entering satellite
longitudes and user control commands, to direct the dish-antenna. The micro-controller
provides the control signals to the motors drivers to direct the antenna. The real model was
tested using different sites data (longitude, latitude) for different locations in Sudan (Wad
Medani, Um-Durman, Port-Sudan and Kassala). The real model results illustrate that the
model achieves the azimuth/elevation positioning process in high precision. The highest
azimuth difference-average (miss-alignment) was 0.28° obtained in Kassla with gain-loss up
to -0.4255dB. Also the highest elevation difference-average was 0.28° obtained in Um-
Durman with gain-loss up to -0.4255dB. For the polarization, the highest difference-average
was 0.25° obtained in Wad Medani with miss-matching loss up to -0.000043dB. The designed
positioning system improves the directing time. It takes 40 seconds to achieve the intended
position when compared with previous studies where minimum directing time was 3 minutes.
In addition to that the designed system uses a small size microcontroller board, avoids tuning
complexity when compared with the similar system. The research recommended,
implementing the system in the southern hemisphere by modifying the mathematical model
specifically the azimuth angle and settings. Also recommends studying the dish-antenna
weight and mechanical part deeply in the design process.
vii
تصميم نظام توجيه تلقائي لهوائي إستقبال اإلشارات التلفزيونية من األقمار الصناعية
عماد الدين عبد الجبار محمد الحسن عثمان
دراسةال ملخص
األقمار الصناعية هي إحدى الطرق المستخدمة لزيادة مساحة البث التلفزيوني. في بعض األحيان قد تقع بعض المناطق
لمستخدم من اإلستمتاع ومشاهدة القنوات الفضائية التي ان األقمار الصناعية. وحتى يتمكن البث الخاص بعدد مفي مجال
فترة الهوائي بصورة دقيقة وفي هتبث عبر هذه األقمار. كان ال بد من توفر نظام تحكم يمكن من التنقل بين األقمار وتوجي
والراسي Azimuth الهوائيات في البعدين األفقي هالمجال على توجيزمنية قصيرة. عملت عدة دراسات سابقة في هذا
Elevation دون األخذ في اإلعتبار عملية ضبط اإلستقطاب الخاص باإلشارات المستقبلة Polarization هدفت هذه .
عية التي يقع في الصنا الدراسة الي تصميم نظام تحكم عن بعد يسمح للمستخدم بتوجيه هوائي اإلستقبال والتنقل بين األقمار
نطاق بثها بطريقة فعالة ودقيقة وسهلة اإلستخدام. يعتمد النظام المصمم على إحداثيات موقع الهوائي وإحداثي القمر
ياضية رظام بتحويل هذه الزوايا من قيم المستهدف في عمليات حساب الزوايا )األفقي والراسي واألستقطاب( ومن ثم يقوم الن
قية )وذلك باستخدام موتورات الخطوة( تخلص الي توجية الهوائي في إتجاه القمر المستهدف. تم تصميم الي إتجاهات حقي
هذا النظام في مرحلتين. إحتوت المرحلة األولى على النموذج الرياضي الذي تم تطويره بناء على الفرضيات والمعادالت
الخطوة حركاتط بين مواصفات الهوائي المستخدم ومالرياضية. في هذه المرحلة تم إيجاد عالقة رياضية عامة ترب
. أيضا في هذه المرحلة تم عمل محاكاة للنظام المصمم ةة عالياءهذه العالقة تضمن عمل النظام بكفالمستخدمة في هذا النظام.
ي الي الرياض موذجكما تم التحقق من صحة النظام وإمكانية تطبيقه. في المرحلة الثانية من الدراسة تم تحويل محاكاة الن
نموذج حقيقي. إحتوى النموذج على شفرة البرنامج الذي يعمل على التحكم في النظام المصمم، كما إحتوى على المكونات
الخطوة وجهاز تحكم عن بعد. يستخدم النموذج حركاتمو ARDUINO-Unoالمادية المتمثلة في متحكمة أردوينو انو
جهاز التحكم عن بعد كوحدة إدخال يعمل على إدخال إحداثي القمر المستهدف الي المتحكمة والتي بدورها تعمل على إجراء
إحداثيات مالعمليات الحسابية الالزمة ومن ثم توفر إشارات التحكم الالزمة لتوجية الهوائي. تم إختبار هذا النموذج بإستخدا
عدد من المواقع في السودان )ودمدني و أمدرمان وكسال وبورتسودان(. أظهرت نتائج هذه اإلختبارات أن النموذج المصمم
يعمل على إنجاز عملية التوجيه في البعدين األفقي والرأسي بدقة عالية، حيث كانت أعلى قيمة متوسط إنحراف في البعد
. و كانت أعلى قيمة متوسط 0.4255dB-نة كسال وكانت قيمة الفاقد في الكسب هي سجلت في مدي °0.28األفقي هي
. أما 0.4255dB-سجلت في مدينة أمدرمان وكانت قيمة الفاقد في الكسب هي °0.28إنحراف في البعد الرأسي هي
-الفاقد في الكسب هي سجلت في مدينة ودمدني وكانت قيمة °0.25ستقطاب فقد كانت أعلى قيمة متوسط إنحراف هيإلا
0.000043dB ثانية 04. كما أظهرت نتائج اإلختبارات أن النموذج عمل على توجيه الهوائي في فترة زمنية ال تزيد عن
غير معقدة مقارنة باألنظمة األخرى. أوصت استخدامه لتقنية دقائق فضال عن 3مقارنة بالدراسات السابقة التي تستغرق
النموذج في النصف الجنوبي من الكرة األرضية كما اوصت بدراسة مواصفات الهوائي والمواصفات الدراسة بتطبيق هذا
الميكانيكية للنموذج بصورة أكثر عمقا.
viii
LIST OF CONTENTS ACKNOWLEDGEMENTS .................................................................................................... iv
DEDICATION ......................................................................................................................... v
ABSTRACT ........................................................................................................................... vi
ABSTRACT IN ARABIC .................................................................................................... vii
LIST OF CONTENTS .......................................................................................................... viii
LIST OF TABLES ................................................................................................................ xiv
LIST OF FIGURES ............................................................................................................... xv
LIST OF ABBREVIATIONS ............................................................................................ xviii
CHAPTER ONE ...................................................................................................................... 1
1 INTRODUCTION ........................................................................................................ 1
1.1 BACKGROUND ...................................................................................................... 1
1.2 PROBLEM STATEMENT ....................................................................................... 2
1.3 OBJECTIVES ........................................................................................................... 2
1.4 ORGANIZATION OF THE THESIS ....................................................................... 2
CHAPTER TWO ..................................................................................................................... 4
2 LITERATURE REVIEW ............................................................................................. 4
2.1 Communications Satellite ......................................................................................... 4
2.1.1 Types of Satellite ............................................................................................... 4
High Elliptical Orbiting Satellite (HEO) ....................................................... 4
Middle-Earth Orbiting Satellite (MEO) ......................................................... 5
Low-Earth Orbiting Satellite (LEO) .............................................................. 5
Geostationary Orbit Satellite (GEO) .............................................................. 5
2.1.1.4.1 Geometric Distances ................................................................................. 5
2.1.2 Polarization of Satellite Signal .......................................................................... 8
ix
Circular Polarization ...................................................................................... 8
Linear Polarization ......................................................................................... 9
2.2 Antenna ................................................................................................................... 11
2.2.1 Dish-Antenna ................................................................................................... 11
Dish-Antenna Types .................................................................................... 12
Dish-Antenna Gain ...................................................................................... 15
Dish-antenna Beam-Width ........................................................................... 17
2.3 Stepper Motors ........................................................................................................ 18
2.3.1 Types of Stepping Motors ............................................................................... 20
Permanent-magnet (PM) .............................................................................. 20
Variable-reluctance (VR) ............................................................................. 21
2.3.1.2.1 Multi-Stack Variable-Reluctance ........................................................... 21
2.3.1.2.2 Single-stack variable-reluctance stepping motors .................................. 24
Hybrid stepping motors ................................................................................ 25
2.3.2 Operation Mode ............................................................................................... 27
One-Phase-On Full Operation Mode ........................................................... 28
Two-Phase-On Full Operation Mode ........................................................... 29
Half-step Operation Mode ........................................................................... 29
Micro-stepping Operation Mode .................................................................. 30
2.3.3 Choosing a Motor ............................................................................................ 31
Variable Reluctance versus Permanent Magnet or Hybrid .......................... 31
Hybrid versus Permanent Magnet ................................................................ 31
2.3.4 Other Stepping Motors .................................................................................... 32
2.4 Motion Control Systems ......................................................................................... 33
2.4.1 Merits of Electric Systems ............................................................................... 33
x
2.4.2 Motion Control Classification ......................................................................... 33
Closed-Loop System .................................................................................... 33
Open-Loop Motion Control Systems ........................................................... 34
2.5 Previous Related Studies ......................................................................................... 36
CHAPTER THREE ............................................................................................................... 44
3 METHODOLOGY ..................................................................................................... 44
3.1 Theoretical model development processes ............................................................. 45
3.1.1 Assumptions and Arrangements ...................................................................... 45
3.1.3 Mathematical Model ........................................................................................ 45
Azimuth and elevation part .......................................................................... 45
Polarization Part ........................................................................................... 49
Combination of Azimuth, Elevation and Polarization ................................. 50
3.1.2.3.1 Digits to Pulse Transformation ............................................................... 52
3.1.2.3.2 Operation Estimated Time ...................................................................... 52
3.1.2.3.3 System Position Precision Calculation ................................................... 53
3.2 Simulation Model .................................................................................................... 55
3.2.1 Simulation Tests .............................................................................................. 57
Equations Validation .................................................................................... 57
Positioning Accuracy Insurance ................................................................... 57
Maximum Positioning Time ........................................................................ 57
3.3 Designed Model ...................................................................................................... 57
3.3.1 Hardware Design and Requirements ............................................................... 58
Hardware and Components .......................................................................... 58
3.3.1.1.1 Computer ................................................................................................ 58
3.3.1.1.2 Arduino Uno R3 Card ............................................................................ 59
xi
3.3.1.1.3 IR-remote Control .................................................................................. 59
3.3.1.1.4 IR-Receiver ............................................................................................. 59
3.3.1.1.5 Stepper-Motor Drivers ............................................................................ 59
3.3.1.1.6 Stepper-Motors ....................................................................................... 60
3.3.1.1.7 Limit Switches ........................................................................................ 61
Entire System Wiring ................................................................................... 61
3.3.2 Software Design and Requirements ................................................................. 62
System Software .......................................................................................... 62
3.3.2.1.1 Arduino tools .......................................................................................... 63
3.3.2.1.2 Arduino C ............................................................................................... 63
System-Driver Modelling ............................................................................ 63
3.3.2.2.1 Setup function ......................................................................................... 63
3.3.2.2.2 Loop function ......................................................................................... 64
3.3.2.2.3 IR-remote Control Decoder function ...................................................... 64
3.3.2.2.4 Satellite Longitude Digits Function:....................................................... 64
3.3.2.2.5 Operation Confirm Function .................................................................. 65
3.3.2.2.6 Counter Reset function ........................................................................... 66
3.3.2.2.7 Calculations Function ............................................................................. 67
3.3.2.2.8 Back to Reference Function ................................................................... 68
3.3.2.2.9 Reset Satellite Function .......................................................................... 69
3.4 Experimental Test ................................................................................................... 70
3.4.1 Unit Testing ..................................................................................................... 70
3.4.2 Model Integration ............................................................................................ 70
3.5 System Validation ................................................................................................... 70
CHAPTER FOUR ................................................................................................................. 71
xii
4 RESULTS AND DISCUSSIONS .............................................................................. 71
4.1 Theoretical Results .................................................................................................. 71
4.2 Simulation Model Results ....................................................................................... 72
4.2.1 Equations Validation ....................................................................................... 72
4.2.2 Positioning Accuracy Insurance ...................................................................... 73
4.2.3 Maximum Positioning Time Results ............................................................... 77
First site (14.39°N, 33.52°E) ........................................................................ 77
Second site (14.323°N, 33.553°E) ............................................................... 77
4.2.4 Simulation Results Summary .......................................................................... 78
4.3 Model Experimental Setup and Results .................................................................. 78
First site (14.38°N, 33.52°E) Wad Medani: ................................................. 79
Second Site (15.638°N, 32.495°E) Um-Durman: ........................................ 80
The third site (19.61°N, 37.22°E) Port-Sudan: ............................................ 81
The fourth site (15.449°N, 36.39°E) Kassala: ............................................. 82
4.3.2 Model Integration ............................................................................................ 83
4.4 Designed System Validation ................................................................................... 84
4.4.1 Designed System in Contrast with Satsig.net and satlex.de Calculations ....... 84
First site (14.38°N, 33.52°E) Wad Medani .................................................. 84
Second Site (15.638°N, 32.495°E) Um-Durman ......................................... 86
Third site (19.61°N, 37.22°E) Port-Sudan ................................................... 87
Fourth site (15.449°N, 36.39°E) Kassala ..................................................... 89
4.4.2 Comparison between the Designed System and Related Studies .................... 91
CHAPTER FIVE ................................................................................................................... 92
CONCLUSIONS AND RECOMMENDATIONS ................................................................ 92
5.1 Conclusions ............................................................................................................. 92
xiii
5.2 Recommendations ................................................................................................... 92
6 References .................................................................................................................. 94
7 Appendixes ................................................................................................................. 97
7.1 Appendix [A] .......................................................................................................... 97
7.2 Appendix [B]........................................................................................................... 99
7.3 Appendix [C]......................................................................................................... 100
7.4 Appendix [D] ........................................................................................................ 102
7.5 Appendix [E] ......................................................................................................... 104
7.6 Appendix [F] ......................................................................................................... 105
xiv
LIST OF TABLES
TABLE 2.1 RELATIONSHIP BETWEEN WINDING CURRENT AND POLE FIELD DIRECTIONS
(ACARNLEY, 2007) .......................................................................................................... 26
TABLE 2.2 SUMMARIZATION OF THE RELATED STUDIES ........................................................ 42
TABLE 3.1 THE PROPERTIES OF THE USED LAPTOP ................................................................. 58
TABLE 3.2 THE JK1545 STEPPER MOTOR DRIVER PROPERTIES .............................................. 60
TABLE 3.3 STEPPER MOTORS PROPERTIES ............................................................................. 60
TABLE 4.1 THE RESULTS OF SATCALC-LITE IN CONTRAST WITH DESIGNED-SOFTWARE ON THE
SITE (14.39 °N, 33.52 °E) ............................................................................................... 72
TABLE 4.2 THE RESULTS OF SATCALC-LITE IN CONTRAST WITH DESIGNED-SOFTWARE ON
THE SITE (14.323°N, 33.553°E) ...................................................................................... 73
TABLE 4.3 SIMULATION CALCULATED ANGLE AND NEAREST ANGLE PROVIDED BY STEPPER
MOTOR-DRIVERS OPERATED IN HALF-STEPPING MODE (0.9°) ....................................... 74
TABLE 4.4 SIMULATION CALCULATED ANGLE AND NEAREST ANGLE PROVIDED BY STEPPER
MOTOR-DRIVERS OPERATE IN MICRO-STEPPING MODE (0.18°) ..................................... 75
TABLE 4.5 ESTIMATED TIME FOR DIRECTING ANTENNA STARTING FROM REFERENCE POINT
TO THE FARTHEST VISIBLE SATELLITE IN THE CLARKE-BELT ......................................... 77
TABLE 4.6 ESTIMATED TIME FOR DIRECTING ANTENNA STARTING FROM REFERENCE POINT
TO THE FARTHEST VISIBLE SATELLITE IN THE CLARKE-BELT ......................................... 77
TABLE 4.7 MODEL TEST READINGS IN (14.38°N, 33.52°E) SITE WITH ADJUSTING THE STEP
ANGLE TO 0.18° AND TIME DELAY TO 10MS ................................................................... 79
TABLE 4.8 MODEL TEST READINGS IN (15.638°N, 32.495°E) SITE WITH ADJUSTING THE STEP
ANGLE TO 0.18° AND TIME DELAY TO 20MS ................................................................... 80
TABLE 4.9 MODEL TEST READINGS IN (19.61°N, 37.22°E) SITE WITH ADJUSTING THE STEP
ANGLE TO 0.36° AND TIME DELAY TO 20MS ................................................................... 81
TABLE 4.10 MODEL TEST READINGS IN (15.449°N, 36.39°E) SITE WITH ADJUSTING THE STEP
ANGLE TO 0.36° AND TIME DELAY TO 20MS ................................................................... 82
TABLE 7.1 THE STEPPER-MOTOR OPERATION CASES ............................................................. 102
TABLE 7.2 THE EFFECT OF AZIMUTH AND ELEVATION MISS-ALIGNMENT ANGLE REPRESENTED
AS A GAIN-LOSS FOR DISH-ANTENNA WITH HPBW ≈ 3°................................................. 105
xv
LIST OF FIGURES
FIGURE 1.2.1 GEOMETRY OF LOOK ANGLES (KOLAWOLE, 2002) ............................................. 6
FIGURE 2.2 CIRCULAR POLARIZED SIGNAL (BALANIS, 2005) .................................................... 9
FIGURE 2.3 VERTICAL AND HORIZONTAL POLARIZED SIGNALS (ELBERT, 2008) ....................... 9
FIGURE 2.4 RELATIVE RECEIVED POWER AS A TRUE RATIO FOR THE VERTICAL AND
HORIZONTAL POLARIZATION ANGLE OF THE RECEIVING ANTENNA IS ROTATED (ELBERT,
2008) ............................................................................................................................... 11
FIGURE 2.5 FOCAL POINT OF PARABOLIC ANTENNA (LWIN AND WIN, 2014) ......................... 12
FIGURE 2.6 PRIME FOCUS FEED PARABOLIC ANTENNA (DIDACTIC, 2015) ............................. 13
FIGURE 2.7 OFFSET-FEED PARABOLIC ANTENNA (DIDACTIC, 2015) ...................................... 13
FIGURE 2.8 CASSEGRAIN ANTENNA (MILLIGAN, 2005) .......................................................... 15
FIGURE 2.9 GREGORIAN ANTENNA (MILLIGAN, 2005) ........................................................... 15
FIGURE 2.10 TYPICAL ANTENNA GAIN VERSUS DISH SIZE (0.5 M TO 32 M, EFFICIENCY FACTOR
= 0.6) (DIDACTIC, 2015) .................................................................................................. 16
FIGURE 2.11 TYPICAL ANTENNA GAIN VERSUS DISH SIZE (UP TO 2 M, EFFICIENCY FACTOR =
0.6) (DIDACTIC, 2015) ..................................................................................................... 17
FIGURE 2.12 3DB (HALF-POWER BEAM WIDTH) VERSUS DISH SIZE (EFFICIENCY FACTOR =0.6)
(DIDACTIC, 2015). ........................................................................................................... 18
FIGURE 2.13 FORCE COMPONENTS BETWEEN TWO MAGNETICALLY PERMEABLE (ACARNLEY,
2007). .............................................................................................................................. 19
FIGURE 2.14 PERMANENT MAGNET (PM) STEPPER MOTOR (GRANT, 2005)........................... 20
FIGURE 2.15 THREE-STACK VARIABLE-RELUCTANCE STEPPING MOTOR CUTAWAY VIEW
(ACARNLEY, 2007) .......................................................................................................... 22
FIGURE 2.16 A- CROSS-SECTION OF A THREE-STACK VARIABLE-RELUCTANCE STEPPING
MOTOR PARALLEL TO THE SHAFT (ACARNLEY, 2007) .................................................... 23
FIGURE 2.17 CROSS-SECTION OF A SINGLE-STACK VARIABLE-RELUCTANCE STEPPING MOTOR
PERPENDICULAR TO THE SHAFT (ACARNLEY, 2007) ....................................................... 24
FIGURE 2.18 SIDE VIEW AND CROSS-SECTIONS OF THE HYBRID STEPPING MOTOR
(ACARNLEY, 2007) .......................................................................................................... 26
FIGURE 2.19 COMMERCIAL HYBRID STEPPING MOTOR (ACARNLEY, 2007) ........................... 27
FIGURE 2.20 ONE-PHASE-ON STEPPER-MOTOR OPERATION (THERAJA AND THERAJA, 2006) 28
xvi
FIGURE 2.21 TRUTH TABLES OF 2-PHASE OPERATING FULL STEP AND HALF STEPPING MODES
(THERAJA AND THERAJA, 2006) ...................................................................................... 29
FIGURE 2.22 HALF-STEP OPERATION MODE (THERAJA AND THERAJA, 2006) ........................ 30
FIGURE 2.23 CONFIGURATIONS OF THE ELECTRO-MECHANICAL AND ELECTRO-HYDRAULIC
STEPPING MOTORS (REID AND HAMID, 2006) ................................................................. 32
FIGURE 2.24 BLOCK DIAGRAM OF A BASIC CLOSED-LOOP CONTROL SYSTEM (SANDIN, 2003)
........................................................................................................................................ 34
FIGURE 2.25 MICROPROCESSOR-BASED OPEN-LOOP CONTROLS (ACARNLEY, 2007) ............ 35
FIGURE 2.26 CONSTANT STEPPING RATE OPEN-LOOP CONTROL (ACARNLEY, 2007) ............. 36
FIGURE 3.1 RESEARCH METHODOLOGY PROCESS ................................................................... 44
FIGURE 3.2 THE FOUR INTEGER CROSS POINTS SURROUND THE FLOAT CALCULATED (AZ, EL)
........................................................................................................................................ 47
FIGURE 3.3 ILLUSTRATES THE ANTENNA HORIZONTALS HPBW AND THE CALCULATED
AZIMUTH LIMITS ............................................................................................................. 48
FIGURE 3.4 (A) INTEGRATION OF AZIMUTH/ELEVATION ANGLES (B) POLARIZATION ANGLE . 50
FIGURE 3.5 THE PRODUCED PULSE CONTROL THE MOTORS MOVEMENT ............................... 52
FIGURE 3.6 SYSTEM OPERATION SEQUENCE FLOW CHART .................................................... 56
FIGURE 3.7 THE DIAGRAM OF SYSTEM MODEL ...................................................................... 58
FIGURE 3.8 THE MODEL WIRING DIAGRAM............................................................................ 62
FIGURE 3.9 THE COUNTER RESET FUNCTION FLOWCHART ..................................................... 66
FIGURE 3.10 THE CALCULATIONS FUNCTION FLOWCHART .................................................... 68
FIGURE 3.11 THE RESET SATELLITE FUNCTION FLOW-CHART ................................................ 69
FIGURE 4.1 THE RELATION BETWEEN ANTENNA DIAMETER AND STEP-ANGLE ...................... 71
FIGURE 4.2 THE POINTED AZIMUTH ANGLES AND THE HPBW LIMITS IN DEGREES ............... 74
FIGURE 4.3 THE POINTED ELEVATION ANGLES AND THE HPBW LIMITS IN DEGREES ............ 75
FIGURE 4.4 SECOND TEST POINTED AZIMUTH ANGLES AND THE HPBW LIMITS IN DEGREES 76
FIGURE 4.5 SECOND TEST POINTED ELEVATION ANGLES AND THE HPBW LIMITS IN DEGREES
........................................................................................................................................ 76
FIGURE 4.6 SYSTEM IMPLEMENTATION AND UNITS TEST ....................................................... 78
FIGURE 4.7 MODEL OF DISH-ANTENNA POSITIONING SYSTEM ............................................... 83
xvii
FIGURE 4.8 WAD MEDANI AZIMUTH MEASURED ANGLES IN CONTRAST WITH SATSIG.NET AND
SATLEX.DE RESULTS ....................................................................................................... 84
FIGURE 4.9 WAD MEDANI ELEVATION MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 85
FIGURE 4.10 WAD MEDANI POLARIZATION MEASURED ANGLES IN CONTRAST WITH
SATSIG.NET AND SATLEX.DE RESULTS ............................................................................ 85
FIGURE 4.11 UM-DURMAN AZIMUTH MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 86
FIGURE 4.12 UM-DURMAN ELEVATION MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 86
FIGURE 4.13 UM-DURMAN POLARIZATION MEASURED ANGLES IN CONTRAST WITH
SATSIG.NET AND SATLEX.DE RESULTS ............................................................................ 87
FIGURE 4.14 PORT-SUDAN AZIMUTH MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 87
FIGURE 4.15 PORT-SUDAN ELEVATION MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 88
FIGURE 4.16 PORT-SUDAN POLARIZATION MEASURED ANGLES IN CONTRAST WITH
SATSIG.NET AND SATLEX.DE RESULTS ............................................................................ 88
FIGURE 4.17 KASSALA AZIMUTH MEASURED ANGLES IN CONTRAST WITH SATSIG.NET AND
SATLEX.DE RESULTS ....................................................................................................... 89
FIGURE 4.18 KASSALA ELEVATION MEASURED ANGLES IN CONTRAST WITH SATSIG.NET AND
SATLEX.DE RESULTS ....................................................................................................... 89
FIGURE 4.19 KASSALA POLARIZATION MEASURED ANGLES IN CONTRAST WITH SATSIG.NET
AND SATLEX.DE RESULTS ............................................................................................... 90
FIGURE 7.1 OPTIMIZING STEPPER-MOTORS DRIVERS’ OPERATION FLOWCHART .................... 103
xviii
LIST OF ABBREVIATIONS
ACU Antenna Control Unit
AM Amplitude Modulation
API Application Program Interface
API Application Program Interface
CCW Counter Clock Wise
CW Clock Wise
DC Direct Current
DSP Digital Signal Processor
FLC Fuzzy Logic Controller
FNBW First-Null Beam Width
GEO Geostationary Orbit
GPS Global Positioning System
HEO High Elliptical Orbiting
HPBW Half-Power Beam Width
IC Integrated Circuit
IDE Integrated Developer Environment
IEEE Institute of Electrical and Electronic Engineer
IR Infra-Red
LEO Low-Earth Orbiting
LHC Left Hand Circulation
LNB Low Noise Block Down-Converter
LPT Parallel Port
LQR Linear Quadratic Regulator
MEO Middle-Earth Orbiting
OPT Orbit Prediction Tracking
PC Personal Computer
PI Proportional-Integral
PID Proportional-Integral-Derivative
PLC Programmable Logic Controller
xix
PM Permanent-Magnet
PMSM Permanent Magnet Synchronous Motor
RHC Right-Hand Circulation
SSP Sub-Satellite Point
STB Set Top Box
STFLC Self-Tuning Fuzzy Logic Controller
TV Television
VR Variable-Reluctance
VRM Variable Reluctance Motors
VSAT Very Small Aperture Terminal

1
CHAPTER ONE
1 INTRODUCTION
1.1 BACKGROUND
Satellite communication is a wireless technology that is used to communicate all-around the
world. A communication satellite is an electronic communication package located in orbit
whose prime objective that is to initiate or assist communication transmission of information
from one point to another through space. Information transmitted in full-duplex (voice and
digital data) as well as in simplex (radio and television) (Kolawole, 2002).
Satellite communication involves other important communication subsystems called earth
stations. The earth station refers collectively to the equipment concerned with transmitting or
receiving signals from the satellite. The gateway through which the earth station
communicates with the satellite is the earth-station antenna. It is a transducer that coverts the
electromagnetic waves to electrical signals and vise-versa. The high altitude of some of these
satellites results in a large path loss during transmission. For this reason, a high-gain dish-
antennas were usually used for this application. Earth stations differ based on the
communication systems. It can be fixed, mobile land, airborne or sea-based (Kolawole, 2002).
Communication satellites were categorized in different types, some of them were known as
geostationary satellites that remain relatively motionless (stationary) in an apparent position
relative to the earth. Also it is called a synchronous or a geosynchronous orbit, or simply a
geosatellite (Kolawole, 2002). It is used as a professional way to increase the TV broadcast
coverage. The earth station transmits (uplink) the television program to the satellite and then
the satellite retransmits (downlink) the television program to a specific area which was known
as satellite coverage area or satellite footprint. To receive signals form a specific satellite,
direct the earth-station antenna in a specific azimuth/elevation angles (look angles) and
aligned the (LNB) with the polarization angle of the electric field of the incoming signals
(skew angle).
In general, sites can be located within the footprints of a number of satellites providing
services simultaneously. To navigate between these satellites, an antenna positioning system
must be used.
2
1.2 PROBLEM STATEMENT
The research highlights a number of problems existing in antenna positioning systems that
can be mentioned as follows:
Design complications.
Hard tuning processes.
Polarization alignment.
Significant delay in positioning process.
1.3 OBJECTIVES
The objective of this research is to design a small dish-antenna control system model for
receiving signals from geostationary satellites operating in Ku-band.
The designed model will:
Provide effective and easy-to-use positioning system.
Minimize the dish alignment-time.
Reduce the system hardware.
Provide a control system that can be embedded in (IRDs) and (STBs).
Allow the user to navigate between satellites remotely (using IR-remote control).
1.4 ORGANIZATION OF THE THESIS
The thesis consists of five chapters arranged as follows:
Chapter one contains introduction, problem definition, objectives and organization of
the thesis.
Chapter two reviews the literature that the research was based on illustrating the
concepts of the research field and the important data used to design the model’s
software/hardware components.
Chapter three discusses the methodology followed to design the model and its
verification. The explanation of the theoretical and mathematical model development
process, model simulation, real model design, experimental test and comparing the
experimental results with other sources for verifications that have been elaborated.
3
Chapter four explains and discusses the results obtained in every phase mentioned in
chapter three. In this chapter, different methods were used (figures, tables and texts)
to clarify and prove the obtained results.
Chapter five consists of the conclusions reached from the research as well as the
recommendations for future work.
And finally there are references and appendixes.
4
CHAPTER TWO
2 LITERATURE REVIEW
This chapter discusses the literature explanation of the current study. Five main titles have
been included in this chapter with their corresponding subtitles. The first title was
communications satellite which is concerned with the satellite type and some of the main
equations used in designing and modelling. The second title was the antenna; focused on the
antenna type used in the research. The third title is the stepper motors (the motors used to
position and reposition the dish-antenna). The fourth title is the motion control systems which
defines the control systems and the uses of the motors in each one. The fifth title is the related
studies which consist of different researches using different antenna positioning system
approaches.
2.1 Communications Satellite
Communications satellite is defined as a repeater station that permits users with appropriate
earth stations to exchange data and information in different formats (Elbert, 2008). New-
generation satellites are regenerative; that is, they have onboard processing capability making
them more of an intelligent unit than a mere repeater. This capability enables the satellite to
reformat received uplink data then routes the data to specified locations, or actually
regenerates data onboard the spacecraft as opposed to act simply as a relay station between
two or more ground stations (Kolawole, 2002).
2.1.1 Types of Satellite
There are, in general, four types of satellite:
High elliptical orbiting satellite (HEO)
Middle-earth orbiting satellite (MEO)
Low-earth orbiting satellite (LEO)
Geostationary satellite (GEO)
High Elliptical Orbiting Satellite (HEO)
HEO satellite is a special satellite continuously swings very close to the earth, loops out into
space, and then repeats its swing by the earth. It is an elliptical orbit almost 18,000 to
5
35,000km above the earth’s surface, not necessarily above the equator. HEOs are designed to
provide better coverage to countries with higher northern or southern latitudes (Kolawole,
2002).
Middle-Earth Orbiting Satellite (MEO)
MEO is a circular orbit satellite orbiting in the region of 8,000 to 18,000 km above the earth’s
surface, again not necessarily above the equator. MEO satellite is a compromise between the
lower orbits and the geosynchronous orbits. MEO system design involves more delays and
higher power levels than satellites in the lower orbits. However, it requires fewer satellites to
achieve the same coverage (Kolawole, 2002).
Low-Earth Orbiting Satellite (LEO)
LEO satellites orbiting the earth in networks that stretch in the region of 160 to 1,600 km
above the earth’s surface. These satellites are small, easy to launch, and lend themselves to
mass production techniques. A network of LEO satellites has the capacity to carry vast
amounts of facsimile, batch file, electronic mail and broadcast data at great speed and
communicate to end users through terrestrial links on ground-based stations. With advances
in technology, it will not be long until utility companies are accessing residential meter
readings through an LEO system or transport agencies and police are accessing vehicle plates,
monitoring traffic flow, and measuring truck weights through an LEO system (Kolawole,
2002).
Geostationary Orbit Satellite (GEO)
A geostationary orbit satellite (also known as the Clarke belt) is a circular orbit in the
equatorial plane with zero eccentricity and zero inclination (Kolawole, 2002). The satellite
remains in a fixed apparent position relative to the earth; about 22,300 miles away from the
earth if its elevation angle is orthogonal (90ᴼ) to the equator. Its revolution period is
synchronized with that of the earth in inertial space (Stonejk, 2010).
2.1.1.4.1 Geometric Distances
By considering the geometry of the geo-satellite’s orbit in its orbital plane, the following
will be calculated:
1. The distance between the satellite and earth station, called the slant range, Rs.
6
2. The azimuth and elevation angles, collectively called the look angles. The look
angles are the coordinates to which an earth station antenna must be pointed to
communicate with a satellite.
The azimuth angle az is the angle at which the earth station’s disk is pointing at the
horizon, whereas the elevation angle θ is the angle by which the antenna bore sight
must be rotated to lock on to the satellite.
3. The width of the viewed section along the orbit ground trace is called the swath
distance or swath width (Kolawole, 2002).
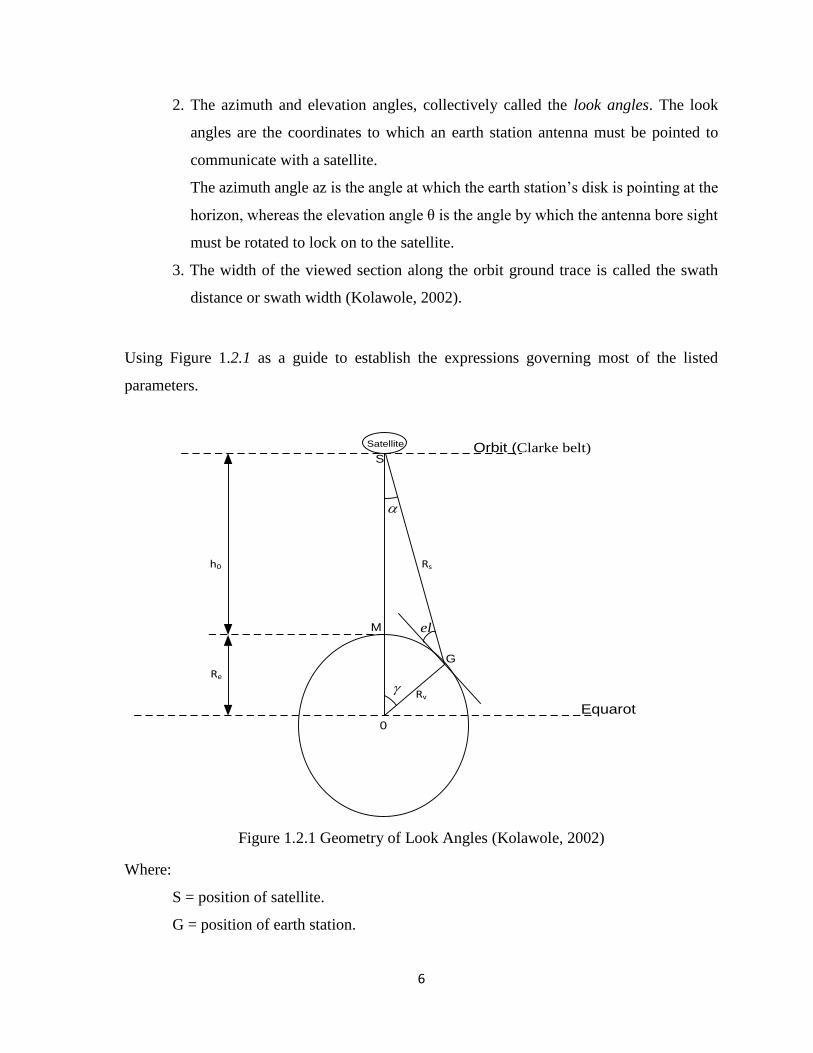
Using Figure 1.2.1 as a guide to establish the expressions governing most of the listed
parameters.
0
Equarot
Orbit (Clarke belt)
h0
M
G
Rv
Re
el
Rs
Satellite
S
Figure 1.2.1 Geometry of Look Angles (Kolawole, 2002)
Where:
S = position of satellite.
G = position of earth station.

7
Rv = OG = geocentric radius of earth at G latitude.
el = elevation angle of satellite from the earth station.
LET = latitude of the earth station. This value is positive for latitudes in the Northern
Hemisphere (i.e., north of the equator) and negative for the Southern Hemisphere (i.e.,
south of the equator).
M = location of sub-satellite point. This location’s longitude and latitude are
determined from a satellite ephemeris table. Nominally, latitude is taken as 0о for
geostationary satellite.
LSAT = latitude of the satellite.
Δ = difference in longitude between the earth station and the satellite.
γ= central angle.
r = radius of the orbit = OM + MS = Re + h0.
The central angle can be determined by using the spherical trigonometric relations as follow
(Kolawole, 2002).
γ = cos−1(sin 𝐿𝑆𝐴𝑇 sin 𝐿𝐸𝑇 + cos 𝐿𝑆𝐴𝑇 𝑐𝑜𝑠𝐿𝐸𝑇𝑐𝑜𝑠Δ) (2.1)
The slant range equation can be written as follow:
Rs = √𝑅𝑒 2 + 𝑟2 − 2rRe cos γ Km (2.2a)
Alternatively,
Rs =Rυ sin γ
cos(γ+θ) Km (2.2b)
The geocentric, Rυ, can be described by
Rυ= Re(0.99832+0.002684 cos2LET – 0.000004cos4LET …) Km (2.3)
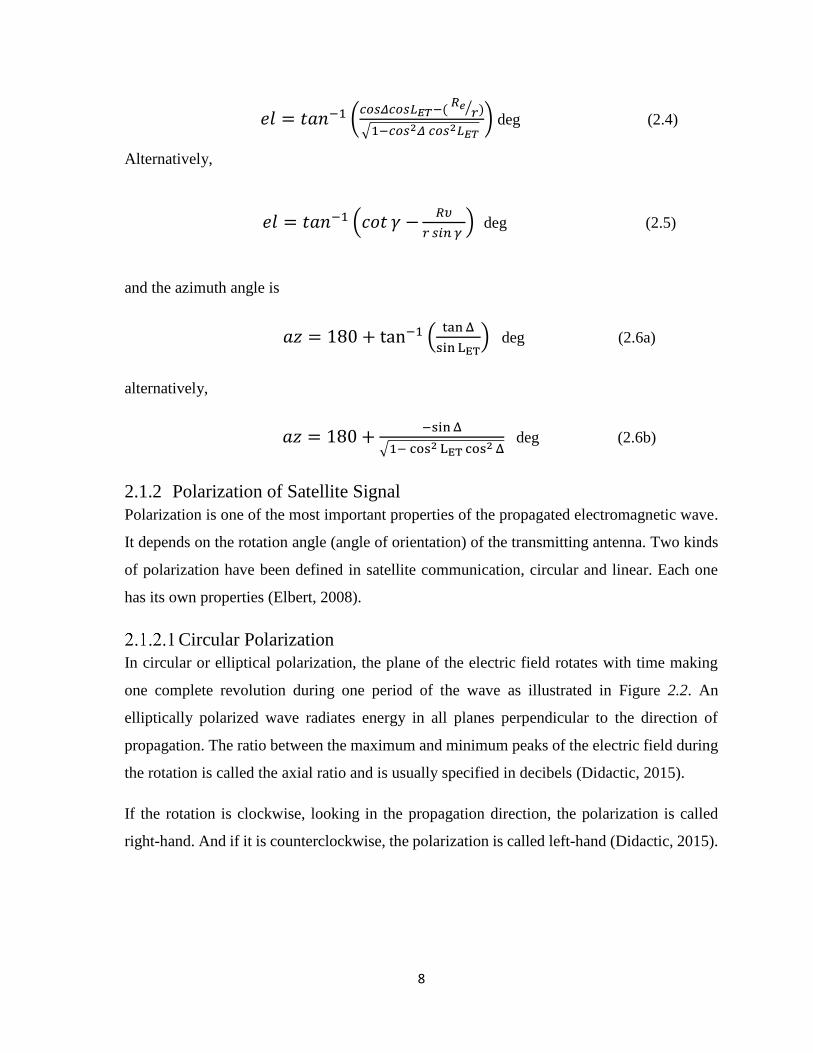
The elevation angle el can be written as
8
𝑒𝑙 = 𝑡𝑎𝑛−1 (𝑐𝑜𝑠𝛥𝑐𝑜𝑠𝐿𝐸𝑇−(
𝑅𝑒𝑟⁄ )
√1−𝑐𝑜𝑠2𝛥 𝑐𝑜𝑠2𝐿𝐸𝑇 ) deg (2.4)
Alternatively,
𝑒𝑙 = 𝑡𝑎𝑛−1 (𝑐𝑜𝑡 𝛾 −𝑅𝜐
𝑟 𝑠𝑖𝑛 𝛾 ) deg (2.5)
and the azimuth angle is
𝑎𝑧 = 180 + tan−1 (tanΔ
sin LET) deg (2.6a)
alternatively,
𝑎𝑧 = 180 +−sinΔ
√1− cos2 LET cos2 Δ
deg (2.6b)
2.1.2 Polarization of Satellite Signal
Polarization is one of the most important properties of the propagated electromagnetic wave.
It depends on the rotation angle (angle of orientation) of the transmitting antenna. Two kinds
of polarization have been defined in satellite communication, circular and linear. Each one
has its own properties (Elbert, 2008).
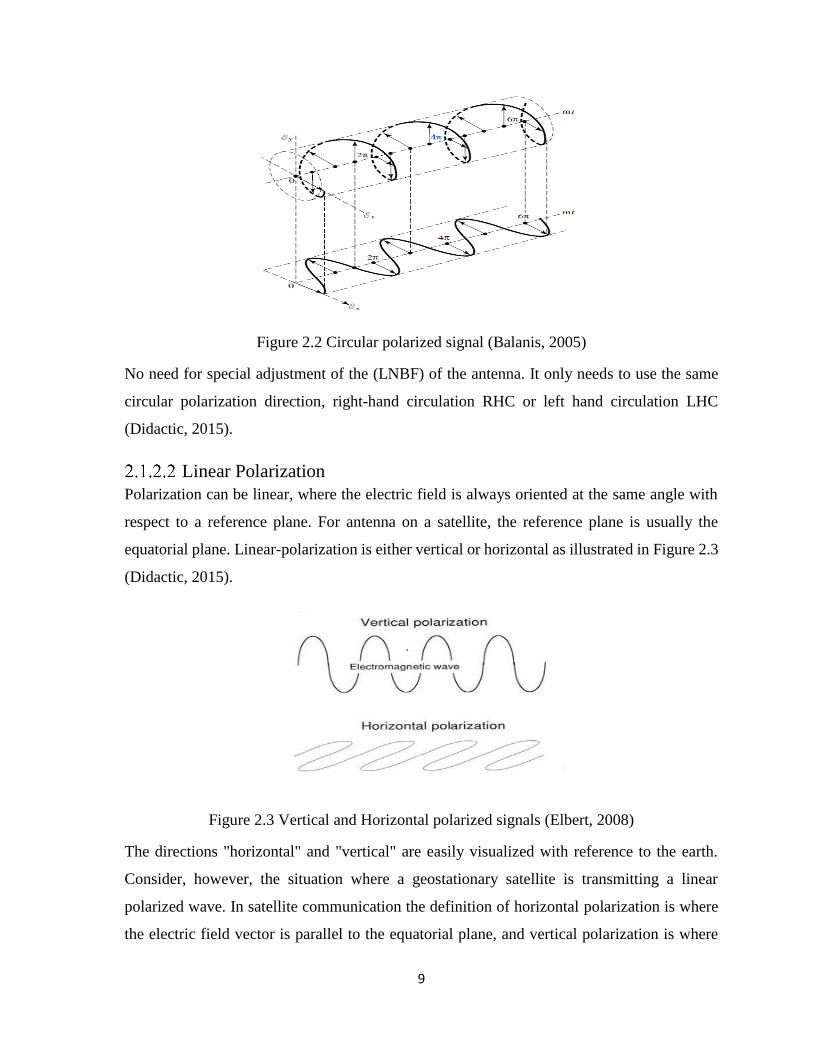
Circular Polarization
In circular or elliptical polarization, the plane of the electric field rotates with time making
one complete revolution during one period of the wave as illustrated in Figure 2.2. An
elliptically polarized wave radiates energy in all planes perpendicular to the direction of
propagation. The ratio between the maximum and minimum peaks of the electric field during
the rotation is called the axial ratio and is usually specified in decibels (Didactic, 2015).
If the rotation is clockwise, looking in the propagation direction, the polarization is called
right-hand. And if it is counterclockwise, the polarization is called left-hand (Didactic, 2015).
9
Figure 2.2 Circular polarized signal (Balanis, 2005)
No need for special adjustment of the (LNBF) of the antenna. It only needs to use the same
circular polarization direction, right-hand circulation RHC or left hand circulation LHC
(Didactic, 2015).
Linear Polarization
Polarization can be linear, where the electric field is always oriented at the same angle with
respect to a reference plane. For antenna on a satellite, the reference plane is usually the
equatorial plane. Linear-polarization is either vertical or horizontal as illustrated in Figure 2.3
(Didactic, 2015).
Figure 2.3 Vertical and Horizontal polarized signals (Elbert, 2008)
The directions "horizontal" and "vertical" are easily visualized with reference to the earth.
Consider, however, the situation where a geostationary satellite is transmitting a linear
polarized wave. In satellite communication the definition of horizontal polarization is where
the electric field vector is parallel to the equatorial plane, and vertical polarization is where
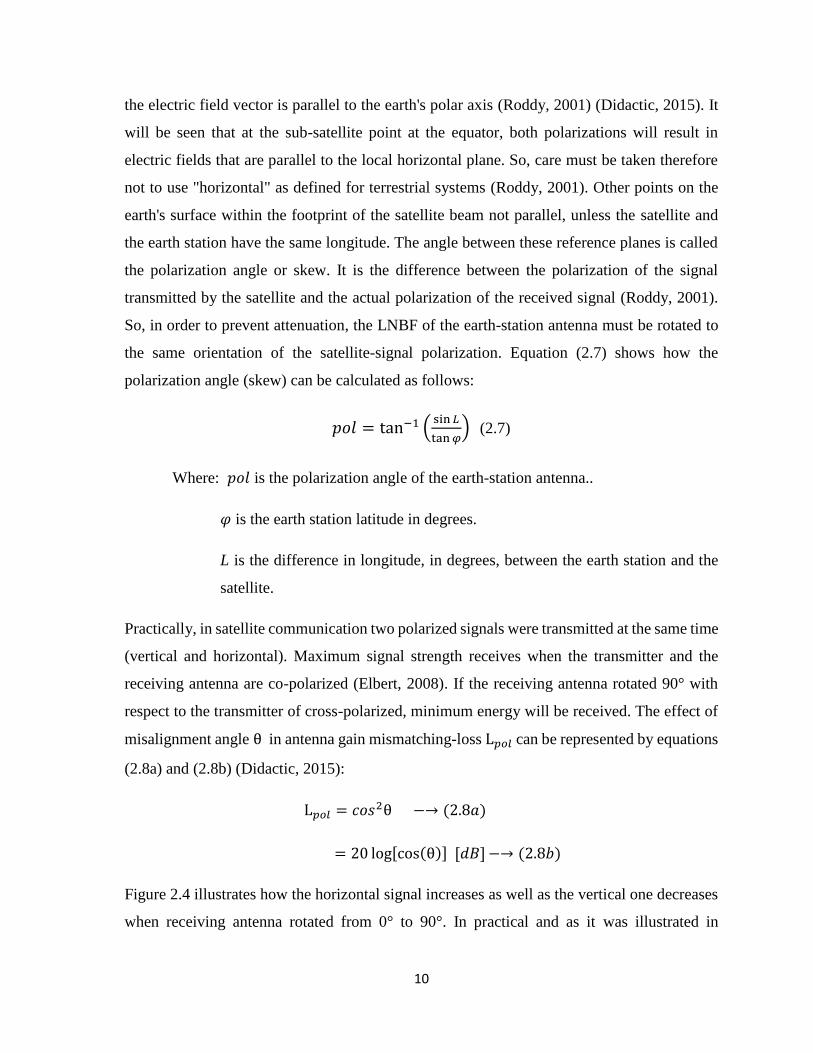
10
the electric field vector is parallel to the earth's polar axis (Roddy, 2001) (Didactic, 2015). It
will be seen that at the sub-satellite point at the equator, both polarizations will result in
electric fields that are parallel to the local horizontal plane. So, care must be taken therefore
not to use "horizontal" as defined for terrestrial systems (Roddy, 2001). Other points on the
earth's surface within the footprint of the satellite beam not parallel, unless the satellite and
the earth station have the same longitude. The angle between these reference planes is called
the polarization angle or skew. It is the difference between the polarization of the signal
transmitted by the satellite and the actual polarization of the received signal (Roddy, 2001).
So, in order to prevent attenuation, the LNBF of the earth-station antenna must be rotated to
the same orientation of the satellite-signal polarization. Equation (2.7) shows how the
polarization angle (skew) can be calculated as follows:
𝑝𝑜𝑙 = tan−1 (sin 𝐿
tan𝜑) (2.7)
Where: 𝑝𝑜𝑙 is the polarization angle of the earth-station antenna..
𝜑 is the earth station latitude in degrees.
L is the difference in longitude, in degrees, between the earth station and the
satellite.
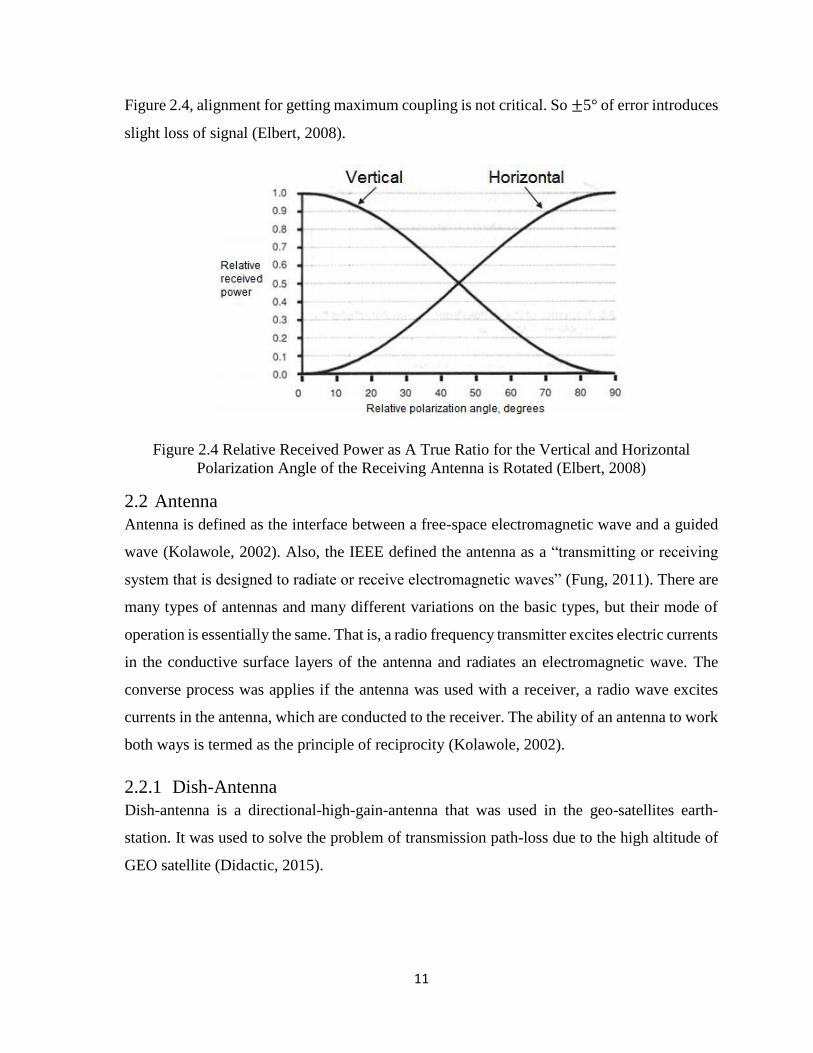
Practically, in satellite communication two polarized signals were transmitted at the same time
(vertical and horizontal). Maximum signal strength receives when the transmitter and the
receiving antenna are co-polarized (Elbert, 2008). If the receiving antenna rotated 90° with
respect to the transmitter of cross-polarized, minimum energy will be received. The effect of
misalignment angle θ in antenna gain mismatching-loss L𝑝𝑜𝑙 can be represented by equations
(2.8a) and (2.8b) (Didactic, 2015):
L𝑝𝑜𝑙 = 𝑐𝑜𝑠2θ −→ (2.8𝑎)
= 20 log[cos(θ)] [𝑑𝐵]−→ (2.8𝑏)
Figure 2.4 illustrates how the horizontal signal increases as well as the vertical one decreases
when receiving antenna rotated from 0° to 90°. In practical and as it was illustrated in
11
Figure 2.4, alignment for getting maximum coupling is not critical. So ±5° of error introduces
slight loss of signal (Elbert, 2008).
Figure 2.4 Relative Received Power as A True Ratio for the Vertical and Horizontal
Polarization Angle of the Receiving Antenna is Rotated (Elbert, 2008)
2.2 Antenna
Antenna is defined as the interface between a free-space electromagnetic wave and a guided
wave (Kolawole, 2002). Also, the IEEE defined the antenna as a “transmitting or receiving
system that is designed to radiate or receive electromagnetic waves” (Fung, 2011). There are
many types of antennas and many different variations on the basic types, but their mode of
operation is essentially the same. That is, a radio frequency transmitter excites electric currents
in the conductive surface layers of the antenna and radiates an electromagnetic wave. The
converse process was applies if the antenna was used with a receiver, a radio wave excites
currents in the antenna, which are conducted to the receiver. The ability of an antenna to work
both ways is termed as the principle of reciprocity (Kolawole, 2002).
2.2.1 Dish-Antenna
Dish-antenna is a directional-high-gain-antenna that was used in the geo-satellites earth-
station. It was used to solve the problem of transmission path-loss due to the high altitude of
GEO satellite (Didactic, 2015).
12
Dish-Antenna Types
Subsequent demands of reflector-antenna for uses in different applications increased the
development progress of experimental techniques and complicated analytical in shaping the
reflectors and optimizing illumination over their apertures to maximize the gain (Balanis,
2005).
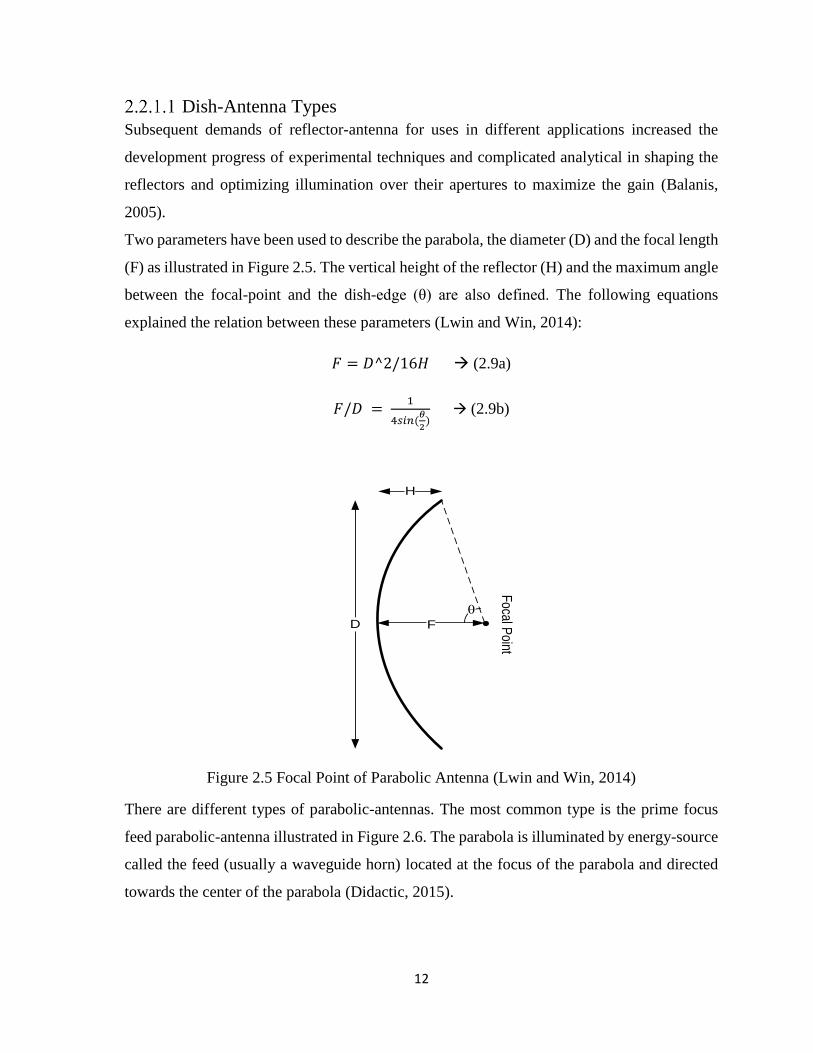
Two parameters have been used to describe the parabola, the diameter (D) and the focal length
(F) as illustrated in Figure 2.5. The vertical height of the reflector (H) and the maximum angle
between the focal-point and the dish-edge (θ) are also defined. The following equations
explained the relation between these parameters (Lwin and Win, 2014):
𝐹 = 𝐷^2/16𝐻 (2.9a)
𝐹/𝐷 = 1
4𝑠𝑖𝑛(𝜃
2) (2.9b)
D
H
F
θ
Focal P
oint
Figure 2.5 Focal Point of Parabolic Antenna (Lwin and Win, 2014)
There are different types of parabolic-antennas. The most common type is the prime focus
feed parabolic-antenna illustrated in Figure 2.6. The parabola is illuminated by energy-source
called the feed (usually a waveguide horn) located at the focus of the parabola and directed
towards the center of the parabola (Didactic, 2015).
13
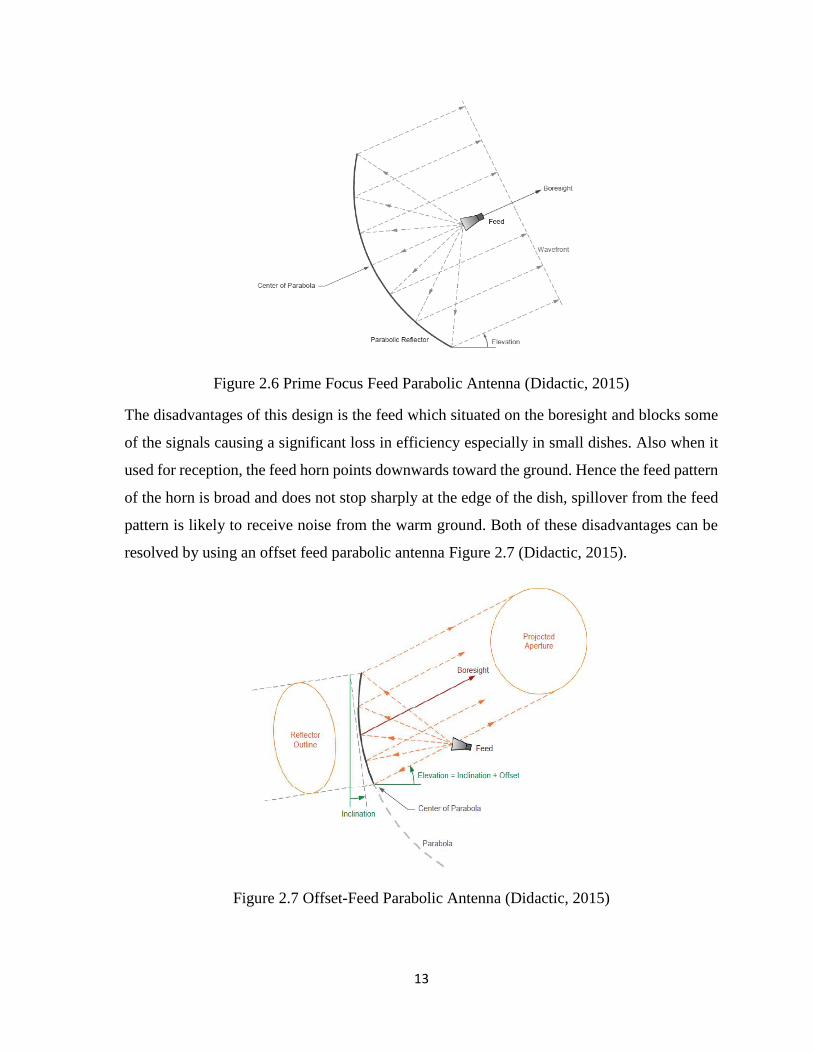
Figure 2.6 Prime Focus Feed Parabolic Antenna (Didactic, 2015)
The disadvantages of this design is the feed which situated on the boresight and blocks some
of the signals causing a significant loss in efficiency especially in small dishes. Also when it
used for reception, the feed horn points downwards toward the ground. Hence the feed pattern
of the horn is broad and does not stop sharply at the edge of the dish, spillover from the feed
pattern is likely to receive noise from the warm ground. Both of these disadvantages can be
resolved by using an offset feed parabolic antenna Figure 2.7 (Didactic, 2015).
Figure 2.7 Offset-Feed Parabolic Antenna (Didactic, 2015)
14
An offset-feed antenna also has the feed at the focus of the parabola. However, the reflector
forms only a section of the parabola. As a result, the feed is no longer on the bore-sight. If the
section does not include the center of the parabola, then none of the radiated beam is blocked
by the feed horn. With many antennas, however, the bottom of the reflector coincides with the
center of the parabola, a shown in Figure 2.7. In this case, a small portion of the beam is
blocked by the feed, causing a slight loss in efficiency (Didactic, 2015).
Although the antennas shown in Figure 2.6 and Figure 2.7 have the same elevation, the feed
horn of the offset feed antenna is pointing slightly upwards, which results in less sensitivity
to noise from the ground (Didactic, 2015).
The reflector of an offset feed antenna is slightly elliptical, as shown in Figure 2.7 with the
long axis in the vertical direction. This ensures that the aperture projected along the bore-sight
is circular. The relation between the short and long axes of the reflector depends on the antenna
offset.
𝑜𝑓𝑓𝑠𝑒𝑡 = cos−1 (𝑠ℎ𝑜𝑟𝑡 𝑎𝑥𝑖𝑠
𝑙𝑜𝑛𝑔 𝑎𝑥𝑖𝑠)−→ (2.10)
The offset of the antenna must be taken into account when setting the elevation of an offset
antenna with the satellite. The elevation will be equal to the inclination of the reflector plus
the offset of the antenna. Figure 2.7 illustrated that the elevation of the antenna is greater than
the inclination of the reflector. The difference between the two is the offset (Didactic, 2015).
𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 = 𝑖𝑛𝑐𝑙𝑖𝑛𝑎𝑡𝑖𝑜𝑛 + 𝑜𝑓𝑓𝑠𝑒𝑡 −→ (2.11)
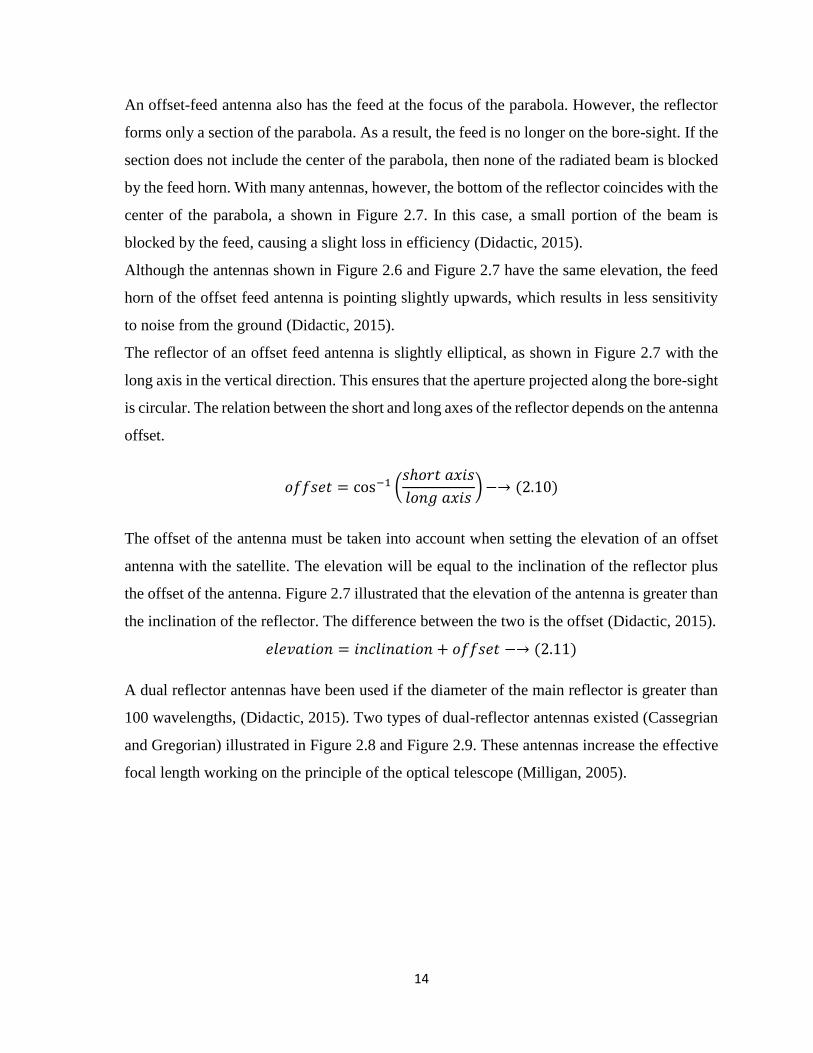
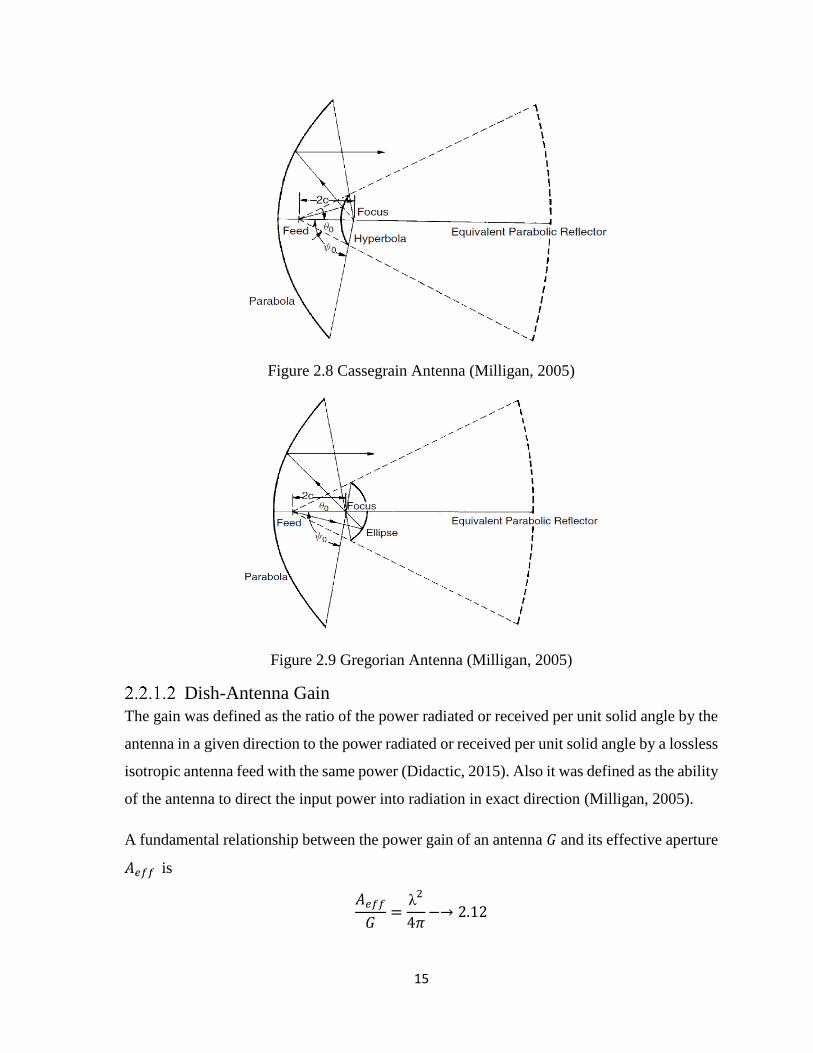
A dual reflector antennas have been used if the diameter of the main reflector is greater than
100 wavelengths, (Didactic, 2015). Two types of dual-reflector antennas existed (Cassegrian
and Gregorian) illustrated in Figure 2.8 and Figure 2.9. These antennas increase the effective
focal length working on the principle of the optical telescope (Milligan, 2005).
15
Figure 2.8 Cassegrain Antenna (Milligan, 2005)
Figure 2.9 Gregorian Antenna (Milligan, 2005)
Dish-Antenna Gain
The gain was defined as the ratio of the power radiated or received per unit solid angle by the
antenna in a given direction to the power radiated or received per unit solid angle by a lossless
isotropic antenna feed with the same power (Didactic, 2015). Also it was defined as the ability
of the antenna to direct the input power into radiation in exact direction (Milligan, 2005).
A fundamental relationship between the power gain of an antenna 𝐺 and its effective aperture
𝐴𝑒𝑓𝑓 is
𝐴𝑒𝑓𝑓
𝐺=
λ2
4𝜋−→ 2.12
16
The effective aperture 𝐴𝑒𝑓𝑓 is smaller than the physical aperture 𝐴𝑝ℎ𝑦𝑠𝑖𝑐𝑎𝑙 by a factor known
as the illumination efficiency 𝜂.
𝐴𝑒𝑓𝑓 = 𝜂𝐴𝑝ℎ𝑦𝑠𝑖𝑐𝑎𝑙 −→ 2.13
The illumination efficiency 𝜂 is usually a specified number within the range of 0.5 and 0.8.
The conventional value often used in calculation is 0.55 (Roddy, 2001).
The physical aperture 𝐴𝑝ℎ𝑦𝑠𝑖𝑐𝑎𝑙 is
𝐴𝑝ℎ𝑦𝑠𝑖𝑐𝑎𝑙 =𝜋𝐷2
4 −→ 2.14
From the relationships given by Equations (2.12) up-to (2.14), the gain is
𝐺 =4𝜋
𝜆2𝜂 𝐴𝑝ℎ𝑦𝑠𝑖𝑐𝑎𝑙−→ 2.15
= 𝜂 (𝜋𝐷
𝜆)2
−→ 2.16
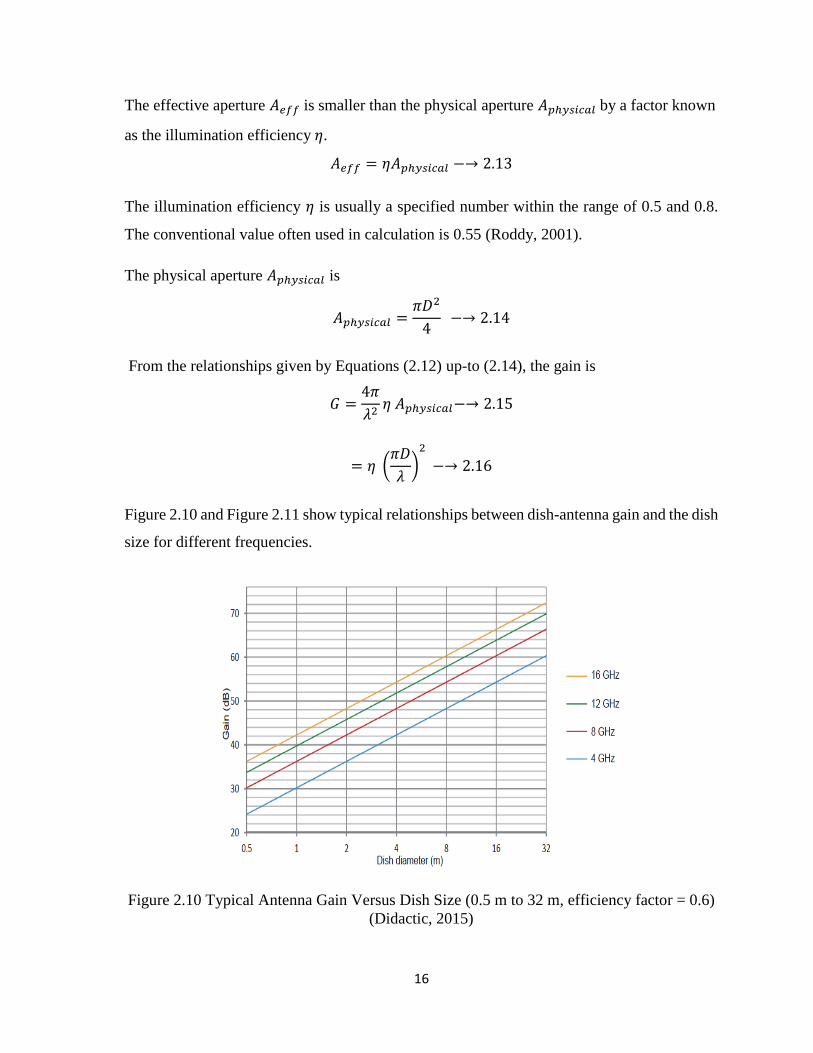
Figure 2.10 and Figure 2.11 show typical relationships between dish-antenna gain and the dish
size for different frequencies.
Figure 2.10 Typical Antenna Gain Versus Dish Size (0.5 m to 32 m, efficiency factor = 0.6)
(Didactic, 2015)
17
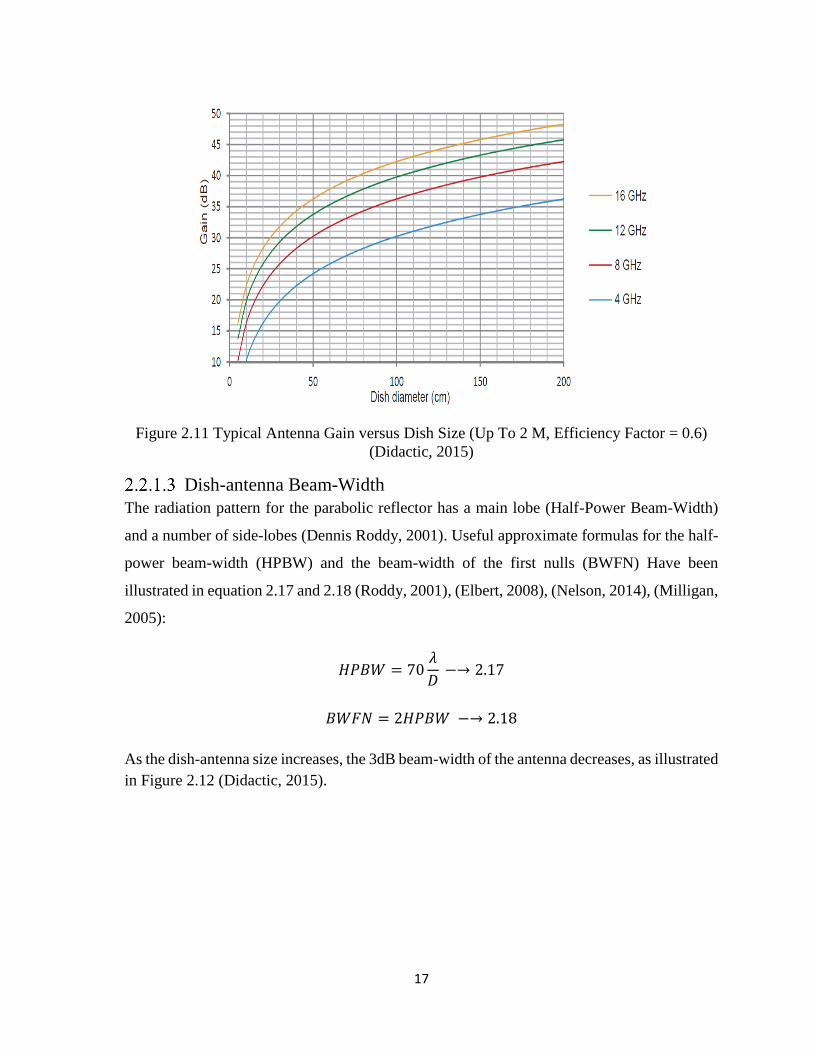
Figure 2.11 Typical Antenna Gain versus Dish Size (Up To 2 M, Efficiency Factor = 0.6)
(Didactic, 2015)
Dish-antenna Beam-Width
The radiation pattern for the parabolic reflector has a main lobe (Half-Power Beam-Width)
and a number of side-lobes (Dennis Roddy, 2001). Useful approximate formulas for the half-
power beam-width (HPBW) and the beam-width of the first nulls (BWFN) Have been
illustrated in equation 2.17 and 2.18 (Roddy, 2001), (Elbert, 2008), (Nelson, 2014), (Milligan,
2005):
𝐻𝑃𝐵𝑊 = 70𝜆
𝐷 −→ 2.17
𝐵𝑊𝐹𝑁 = 2𝐻𝑃𝐵𝑊 −→ 2.18
As the dish-antenna size increases, the 3dB beam-width of the antenna decreases, as illustrated
in Figure 2.12 (Didactic, 2015).
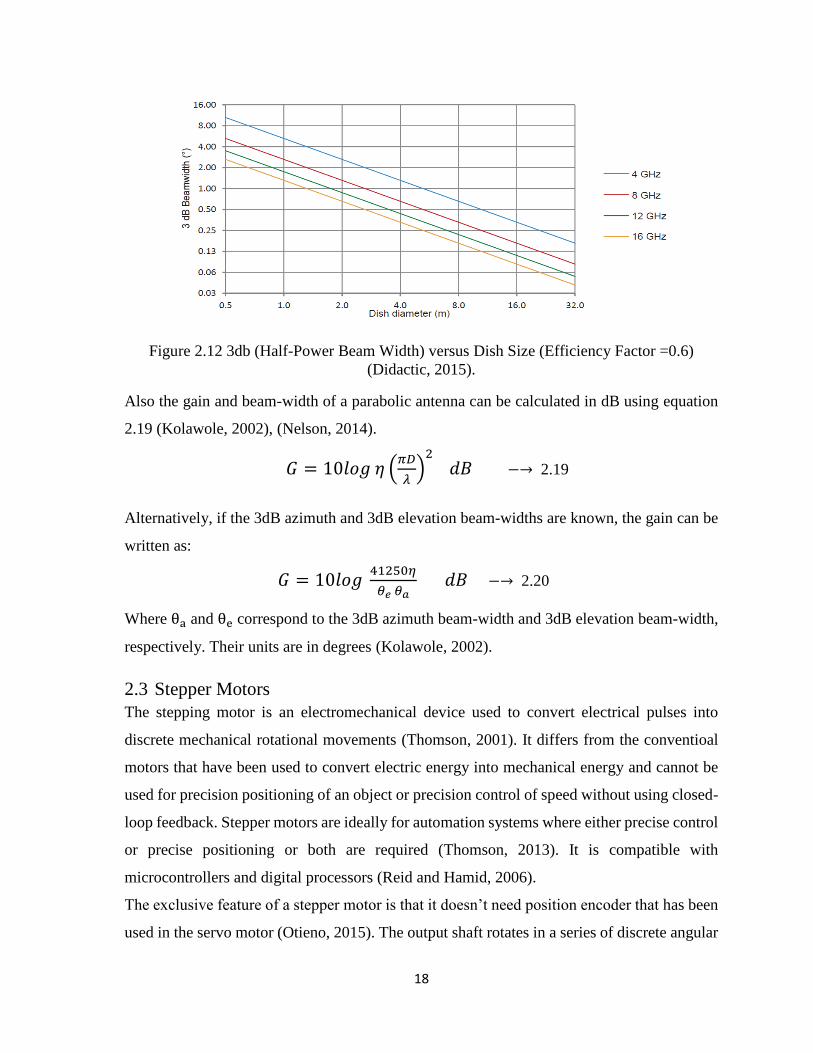
18
Figure 2.12 3db (Half-Power Beam Width) versus Dish Size (Efficiency Factor =0.6)
(Didactic, 2015).
Also the gain and beam-width of a parabolic antenna can be calculated in dB using equation
2.19 (Kolawole, 2002), (Nelson, 2014).
𝐺 = 10𝑙𝑜𝑔 𝜂 (𝜋𝐷
𝜆)2 𝑑𝐵 −→ 2.19
Alternatively, if the 3dB azimuth and 3dB elevation beam-widths are known, the gain can be
written as:
𝐺 = 10𝑙𝑜𝑔 41250𝜂
𝜃𝑒 𝜃𝑎 𝑑𝐵 −→ 2.20
Where θa and θe correspond to the 3dB azimuth beam-width and 3dB elevation beam-width,
respectively. Their units are in degrees (Kolawole, 2002).
2.3 Stepper Motors
The stepping motor is an electromechanical device used to convert electrical pulses into
discrete mechanical rotational movements (Thomson, 2001). It differs from the conventioal
motors that have been used to convert electric energy into mechanical energy and cannot be
used for precision positioning of an object or precision control of speed without using closed-
loop feedback. Stepper motors are ideally for automation systems where either precise control
or precise positioning or both are required (Thomson, 2013). It is compatible with
microcontrollers and digital processors (Reid and Hamid, 2006).
The exclusive feature of a stepper motor is that it doesn’t need position encoder that has been
used in the servo motor (Otieno, 2015). The output shaft rotates in a series of discrete angular
19
steps, one step for each time a command pulse is received. So, receiving a definite number of
pulses, cause in turning the shaft through a definite known angle (no feedback needs to be
taken to the output shaft). This feature reduces the complexity of mechanical part in designed
systems. It makes the stepper-motor well-suited for open-loop position control (Thomson,
2013).
The angle which the motor-shaft rotates for each command pulse is called step-angle β. Small
step-angle means great number of steps per revolution and high resolution or accuracy of
positioning obtained. The most common step-angle size are 1.8°, 2.5°, 7.5° and 15°.
(Thomson, 2013).
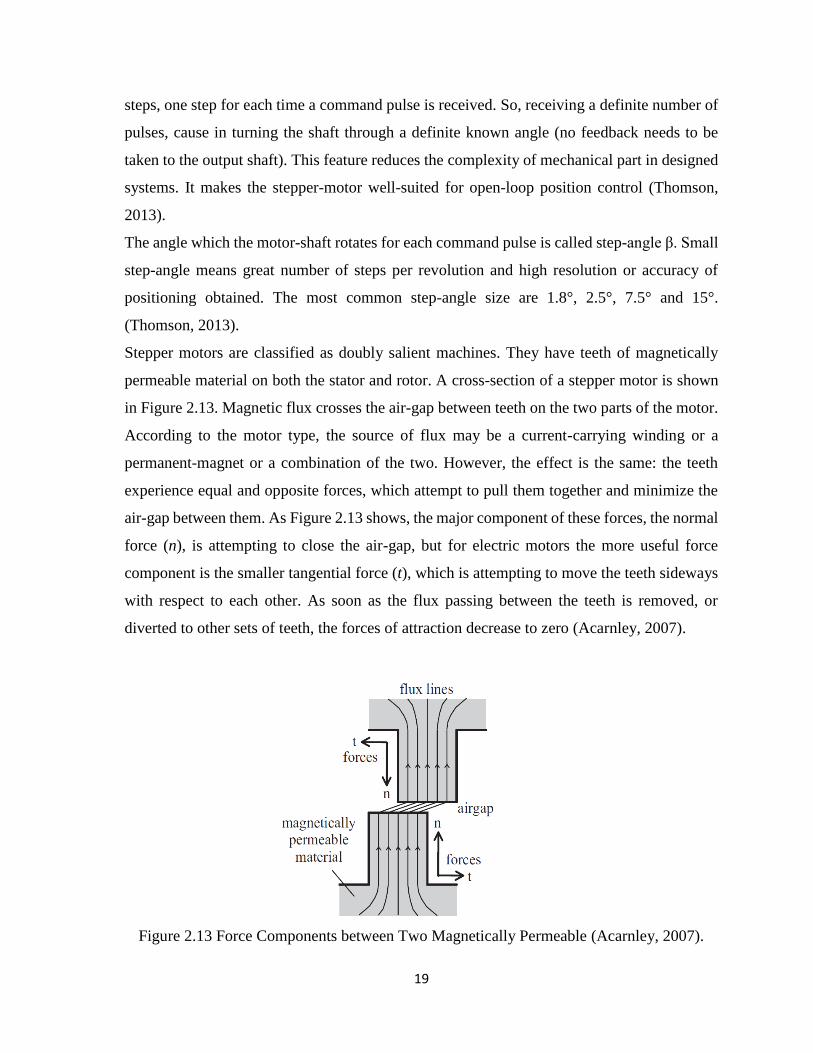
Stepper motors are classified as doubly salient machines. They have teeth of magnetically
permeable material on both the stator and rotor. A cross-section of a stepper motor is shown
in Figure 2.13. Magnetic flux crosses the air-gap between teeth on the two parts of the motor.
According to the motor type, the source of flux may be a current-carrying winding or a
permanent-magnet or a combination of the two. However, the effect is the same: the teeth
experience equal and opposite forces, which attempt to pull them together and minimize the
air-gap between them. As Figure 2.13 shows, the major component of these forces, the normal
force (n), is attempting to close the air-gap, but for electric motors the more useful force
component is the smaller tangential force (t), which is attempting to move the teeth sideways
with respect to each other. As soon as the flux passing between the teeth is removed, or
diverted to other sets of teeth, the forces of attraction decrease to zero (Acarnley, 2007).
Figure 2.13 Force Components between Two Magnetically Permeable (Acarnley, 2007).
20
2.3.1 Types of Stepping Motors
There are three basic types of stepping motors: permanent magnet, variable reluctance and
hybrid. Permanent magnet motors have a magnetized rotor, while variable reluctance motors
have toothed soft-iron rotors and hybrid stepping motors combine features of both permanent
magnet and variable reluctance motors (Condit and Jones, 2004).
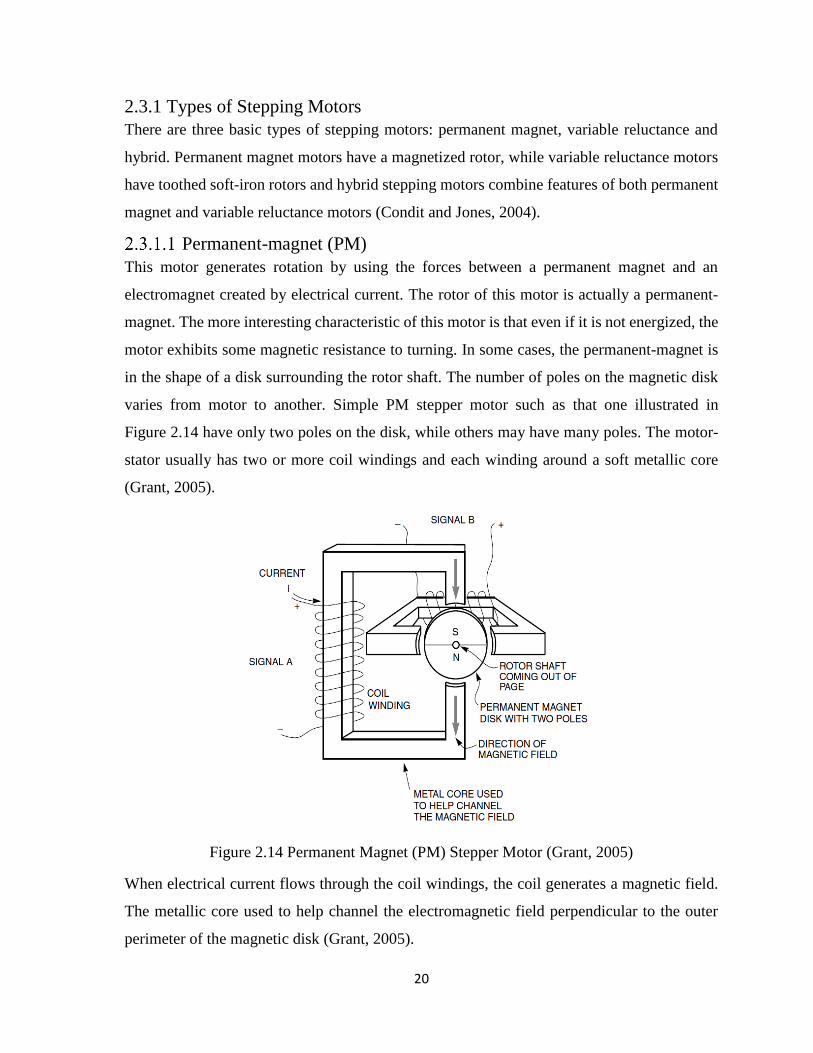
Permanent-magnet (PM)
This motor generates rotation by using the forces between a permanent magnet and an
electromagnet created by electrical current. The rotor of this motor is actually a permanent-
magnet. The more interesting characteristic of this motor is that even if it is not energized, the
motor exhibits some magnetic resistance to turning. In some cases, the permanent-magnet is
in the shape of a disk surrounding the rotor shaft. The number of poles on the magnetic disk
varies from motor to another. Simple PM stepper motor such as that one illustrated in
Figure 2.14 have only two poles on the disk, while others may have many poles. The motor-
stator usually has two or more coil windings and each winding around a soft metallic core
(Grant, 2005).
Figure 2.14 Permanent Magnet (PM) Stepper Motor (Grant, 2005)
When electrical current flows through the coil windings, the coil generates a magnetic field.
The metallic core used to help channel the electromagnetic field perpendicular to the outer
perimeter of the magnetic disk (Grant, 2005).
21
Depends on the polarity of the generated electromagnetic field in the coil and the closest
permanent magnetic field on the disk. This causes in an attraction force spinning the rotor in
a direction that lets an opposite pole on the perimeter of the magnetic disk to align itself with
the electromagnetic field generated by the coil. When the nearest opposite pole on the disk
aligns itself with the electromagnetic field generated by the coil, the rotor will break and
remain fixed in this alignment as long as the electromagnetic field from the coil is not changed
(Grant, 2005).
The value of step-angle β can be expressed either in terms of the rotor and stator poles (teeth)
Nr and Ns respectively or in terms of the number of stator phases (m) and rotor teeth as follow
(Thomson, 2013).
𝛽 =(𝑁𝑠 − 𝑁𝑟)
𝑁𝑠. 𝑁𝑟× 360° (2.22)
OR
𝛽 =360°
𝑚.𝑁𝑟=
360°
𝑁𝑜. 𝑜𝑓 𝑠𝑡𝑎𝑡𝑜𝑟 𝑝ℎ𝑎𝑠𝑒 × 𝑁𝑜. 𝑜𝑓 𝑟𝑜𝑡𝑜𝑟 𝑝ℎ𝑎𝑠𝑒 (2.23)
Variable-reluctance (VR)
There are two configurations for the variable-reluctance stepper motor (multi-stack and
single-stack), but in both cases the magnetic field is produced solely by the winding currents.
It has no permanent-magnet rotor. It has been operated on the principle of minimizing the
reluctance along the path of the applied magnetic field. When the stator coils are energized,
the rotor teeth will align with the energized stator poles. It differs from the PM stepper in that
it has no residual torque to hold the rotor at one position when turned off. (Thomson, 2013).
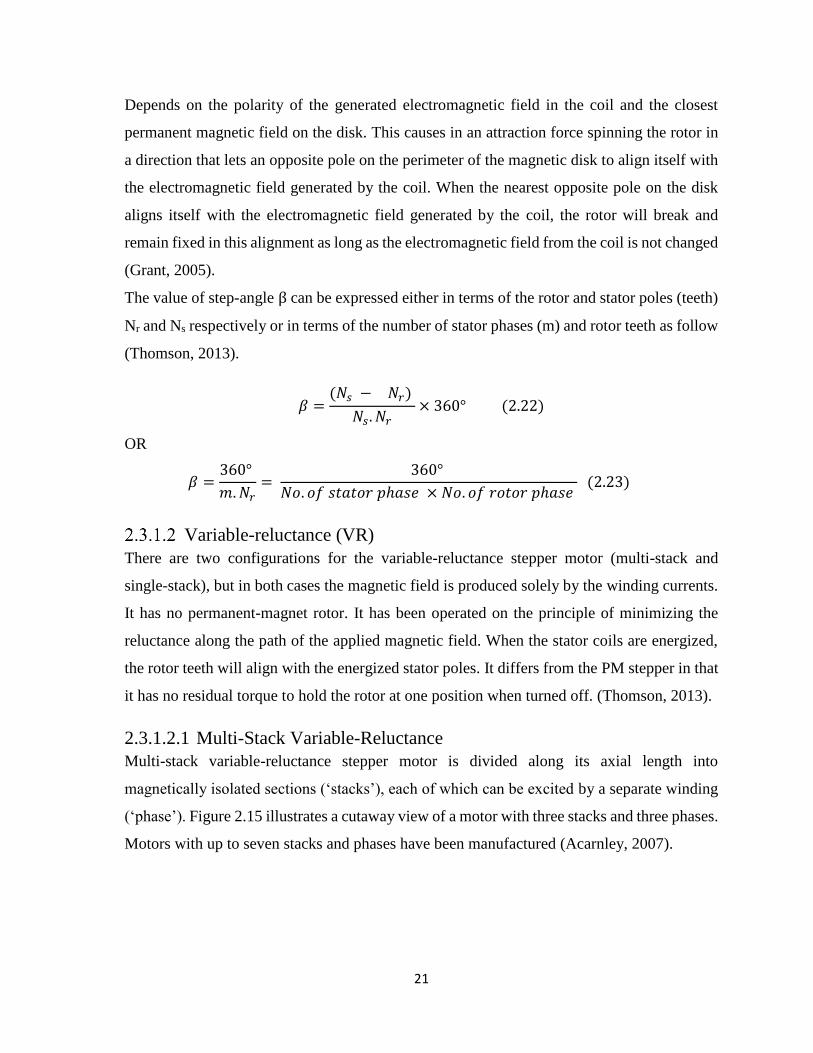
2.3.1.2.1 Multi-Stack Variable-Reluctance
Multi-stack variable-reluctance stepper motor is divided along its axial length into
magnetically isolated sections (‘stacks’), each of which can be excited by a separate winding
(‘phase’). Figure 2.15 illustrates a cutaway view of a motor with three stacks and three phases.
Motors with up to seven stacks and phases have been manufactured (Acarnley, 2007).
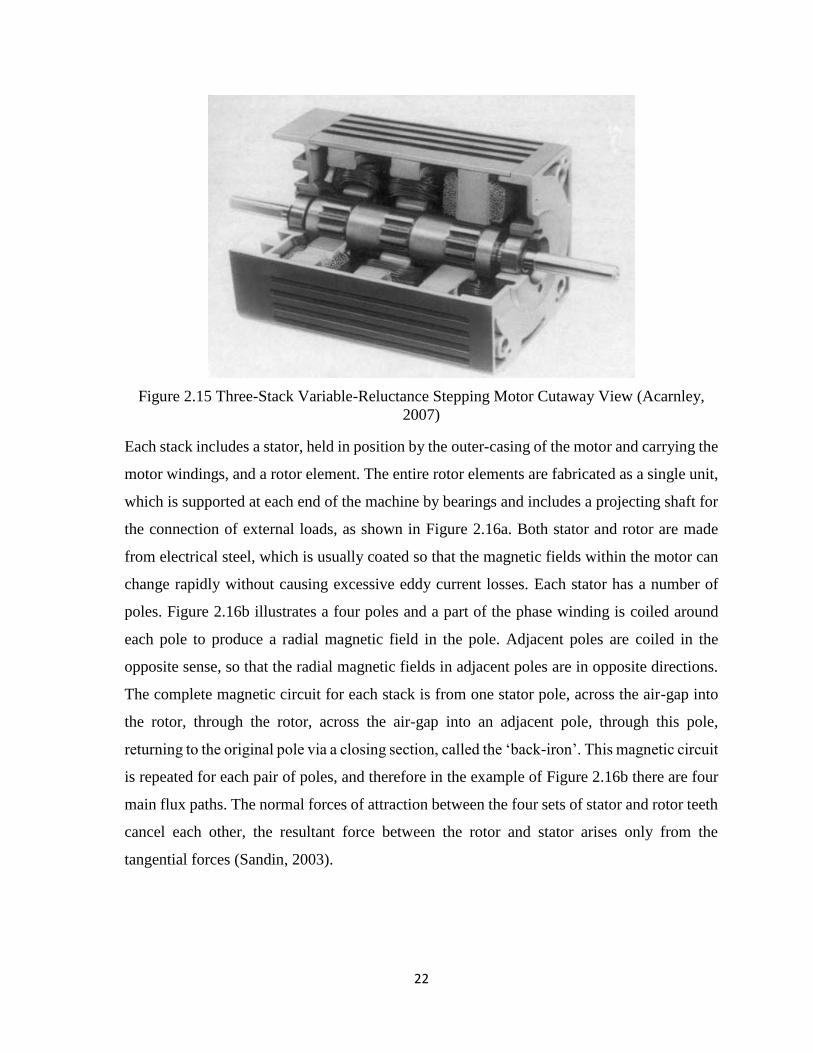
22
Figure 2.15 Three-Stack Variable-Reluctance Stepping Motor Cutaway View (Acarnley,
2007)
Each stack includes a stator, held in position by the outer-casing of the motor and carrying the
motor windings, and a rotor element. The entire rotor elements are fabricated as a single unit,
which is supported at each end of the machine by bearings and includes a projecting shaft for
the connection of external loads, as shown in Figure 2.16a. Both stator and rotor are made
from electrical steel, which is usually coated so that the magnetic fields within the motor can
change rapidly without causing excessive eddy current losses. Each stator has a number of
poles. Figure 2.16b illustrates a four poles and a part of the phase winding is coiled around
each pole to produce a radial magnetic field in the pole. Adjacent poles are coiled in the
opposite sense, so that the radial magnetic fields in adjacent poles are in opposite directions.
The complete magnetic circuit for each stack is from one stator pole, across the air-gap into
the rotor, through the rotor, across the air-gap into an adjacent pole, through this pole,
returning to the original pole via a closing section, called the ‘back-iron’. This magnetic circuit
is repeated for each pair of poles, and therefore in the example of Figure 2.16b there are four
main flux paths. The normal forces of attraction between the four sets of stator and rotor teeth
cancel each other, the resultant force between the rotor and stator arises only from the
tangential forces (Sandin, 2003).

23
Figure 2.16 a- Cross-Section of a Three-Stack Variable-Reluctance Stepping Motor Parallel
to the Shaft (Acarnley, 2007)
b- Cross-Sections of a Three-Stack Variable-Reluctance Stepping Motor Perpendicular to
the Shaft (Acarnley, 2007)
The position of the rotor relative to the stator in a particular stack is accurately defined
whenever the phase winding is excited. Positional accuracy is achieved by means of the equal
numbers of teeth on the stator and rotor, which tend to align so as to reduce the reluctance of
the stack magnetic circuit. In the position where the stator and rotor teeth are fully aligned the
circuit reluctance is minimized and the magnetic flux in the stack is at its maximum value
(Acarnley, 2007).
The step length of a multi-stack variable-reluctance motor can be calculated based on the
numbers of stator/rotor teeth and the number of stacks. If the motor has N stacks (and phases)
the basic excitation sequence consists of each stack being excited in turn, producing a total
rotor movement of N steps. The same stack is excited at the beginning and end of the sequence
and if the stator and rotor teeth are aligned in this stack the rotor has moved one tooth pitch.
Since one tooth pitch is equal to (360/p)°, where p is the number of rotor teeth, the distance
moved for one change of excitation is
𝑠𝑡𝑒𝑝 𝑙𝑒𝑛𝑔𝑡ℎ = (360 𝑁𝑝⁄ )° (2.24)
The motor illustrated in Figure 2.16a has three stacks and eight rotor teeth, so the step length
is 15°. The step length for the multi-stack variable-reluctance stepping motor is typically in
the range (2–15)° (Acarnley, 2007).

24
2.3.1.2.2 Single-stack variable-reluctance stepping motors
This motor is fabricated as a single unit. Its cross-section parallel to the shaft is similar to one
stack of the motor illustrated in Figure 2.15 and Figure 2.16b. The cross-section perpendicular
to the shaft has been illustrated in
Figure 2.17 (Acarnley, 2007).
Considering the stator arrangement, the stator teeth extend from the stator/rotor air-gap to the
back-iron. Each tooth has a separate winding which produces a radial magnetic field when
excited by a direct current. The motor in Figure 2.17 has six stator teeth and the windings on
opposite teeth are connected together to form one phase. So, this machine has three phases
which is the minimum number required to produce rotation in either direction. Windings on
opposite stator teeth are in opposing senses, so that the radial magnetic field in one tooth is
directed towards the air-gap whereas in the other tooth the field is directed away from the air-
gap. For one phase excited the main flux path is from one stator tooth, across the air-gap into
a rotor tooth, directly across the rotor to another rotor tooth/air-gap/stator tooth combination
and returning via the back-iron. However, it is possible for a small proportion of the flux to
leak through unexcited stator teeth. These secondary flux paths produce mutual coupling
between the phase windings of the single-stack stepping motor (Acarnley, 2007).
- - - flux paths for phase A excited
Figure 2.17 Cross-Section of a Single-Stack Variable-Reluctance Stepping Motor
Perpendicular to the Shaft (Acarnley, 2007)
25
The most striking feature of the rotor is that it has a different number of teeth to the stator: the
example of Figure 2.17 has four rotor teeth. With one phase excited only two of the rotor teeth
carry the main flux, the other pair of rotor teeth lie adjacent to the unexcited stator teeth. If the
phase excitation is changed, these other pair of rotor teeth would be aligned with the newly
excited stator teeth.
Figure 2.17 shows the rotor position with phase A excited, the rotor having adopted a position
which minimizes the main flux path reluctance. If the excitation is now transferred to phase
B the rotor takes a step in the anticlockwise direction and the opposite pair of rotor teeth are
aligned with the phase B stator teeth. Excitation of phase C produces another anticlockwise
step, so for continuous anticlockwise rotation the excitation sequence is A, B, C, A, B, C,
A,…. Similarly, clockwise rotation can be produced using the excitation sequence A, C, B,
A, C, B, A,… It is interesting to find that, in the illustrated motor, the rotor movement is in
the opposite direction to the stepped rotation of the stator magnetic field (Acarnley, 2007).
The step length can be simply expressed in terms of the numbers of phases and rotor teeth.
For an N-phase, motor excitation of each phase in sequence produces N steps of rotor motion
and at the end of these N steps excitation returns to the original set of stator teeth. The rotor
teeth are once again aligned with these stator teeth, except that the rotor has moved a rotor
tooth pitch. For a machine with p rotor teeth the tooth pitch is (360/p)° corresponding to a
movement of N steps, so
𝑠𝑡𝑒𝑝 𝑙𝑒𝑛𝑔𝑡ℎ = (360 𝑁𝑝⁄ ) ° (2.25)
In the example of Figure 2.17 there are three phases and four rotor teeth, giving a step length
of 30° (Acarnley, 2007).
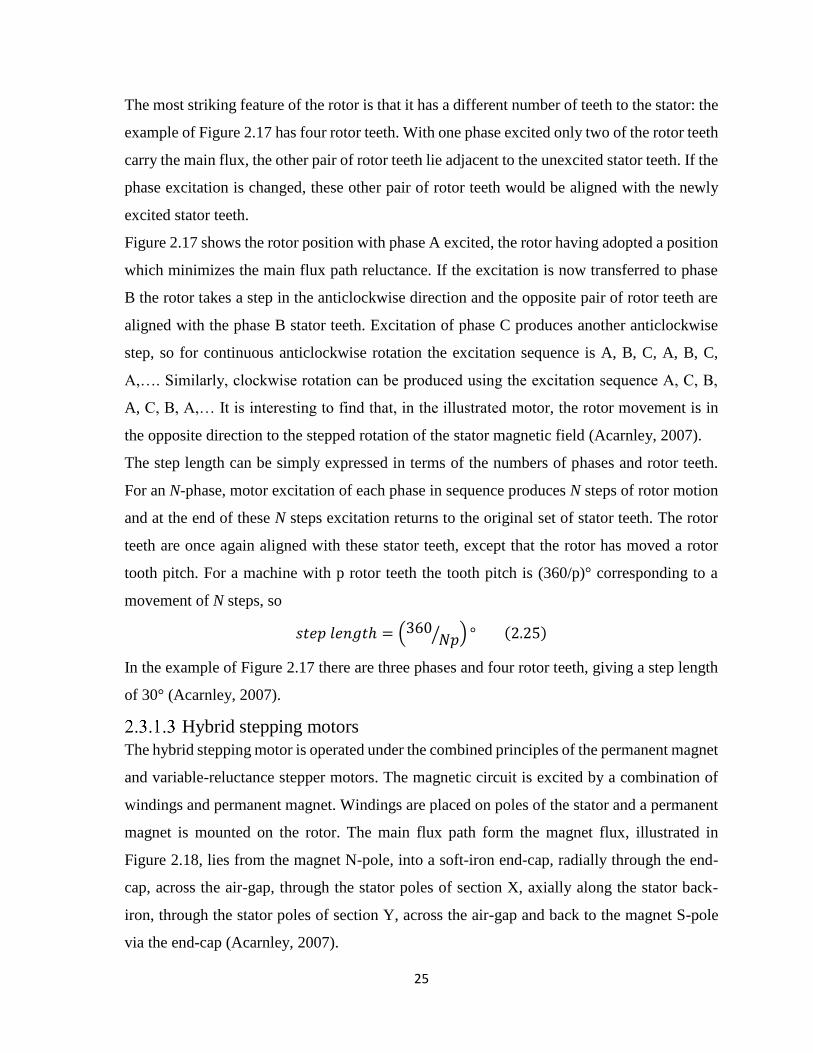
Hybrid stepping motors
The hybrid stepping motor is operated under the combined principles of the permanent magnet
and variable-reluctance stepper motors. The magnetic circuit is excited by a combination of
windings and permanent magnet. Windings are placed on poles of the stator and a permanent
magnet is mounted on the rotor. The main flux path form the magnet flux, illustrated in
Figure 2.18, lies from the magnet N-pole, into a soft-iron end-cap, radially through the end-
cap, across the air-gap, through the stator poles of section X, axially along the stator back-
iron, through the stator poles of section Y, across the air-gap and back to the magnet S-pole
via the end-cap (Acarnley, 2007).
26
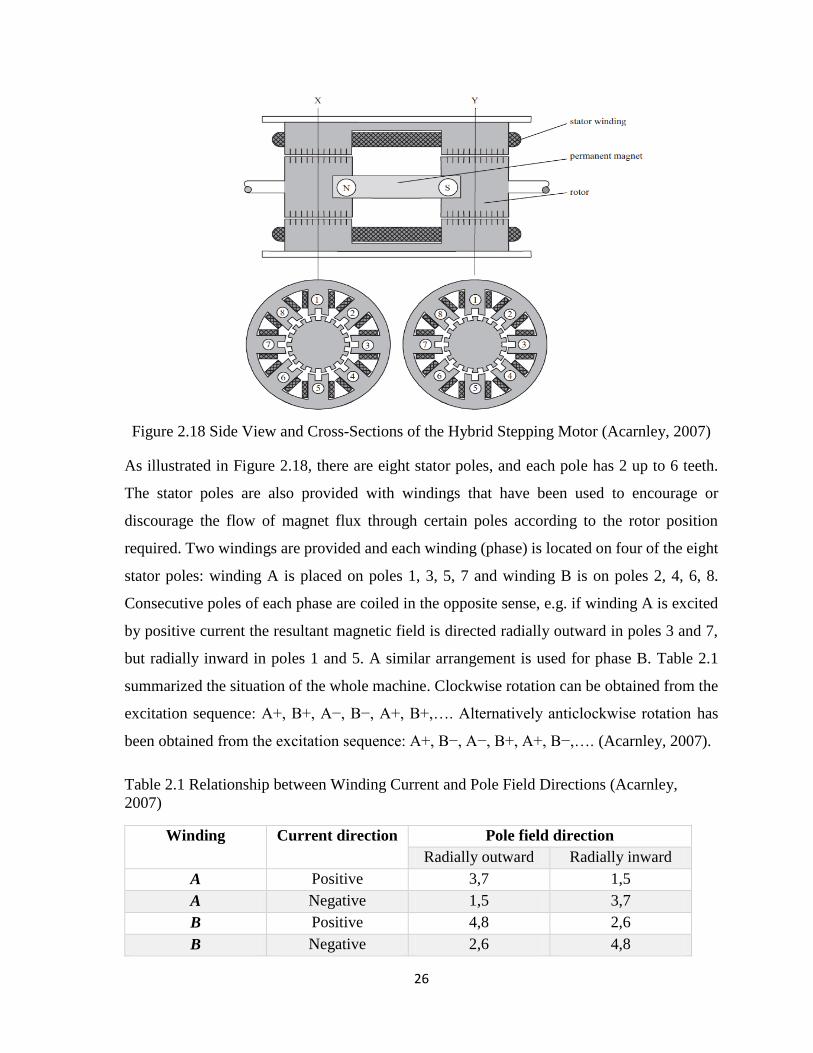
Figure 2.18 Side View and Cross-Sections of the Hybrid Stepping Motor (Acarnley, 2007)
As illustrated in Figure 2.18, there are eight stator poles, and each pole has 2 up to 6 teeth.
The stator poles are also provided with windings that have been used to encourage or
discourage the flow of magnet flux through certain poles according to the rotor position
required. Two windings are provided and each winding (phase) is located on four of the eight
stator poles: winding A is placed on poles 1, 3, 5, 7 and winding B is on poles 2, 4, 6, 8.
Consecutive poles of each phase are coiled in the opposite sense, e.g. if winding A is excited
by positive current the resultant magnetic field is directed radially outward in poles 3 and 7,
but radially inward in poles 1 and 5. A similar arrangement is used for phase B. Table 2.1
summarized the situation of the whole machine. Clockwise rotation can be obtained from the
excitation sequence: A+, B+, A−, B−, A+, B+,…. Alternatively anticlockwise rotation has
been obtained from the excitation sequence: A+, B−, A−, B+, A+, B−,…. (Acarnley, 2007).
Table 2.1 Relationship between Winding Current and Pole Field Directions (Acarnley,
2007)
Winding Current direction Pole field direction
Radially outward Radially inward
A Positive 3,7 1,5
A Negative 1,5 3,7
B Positive 4,8 2,6
B Negative 2,6 4,8
27
The step-length can be related to the number of rotor teeth, p. A complete cycle of excitation
for the hybrid motor consists of four states and produces four steps of rotor movement. The
excitation state is the same before and after these four steps, so the alignment of stator/rotor
teeth occurs under the same stator poles. Therefore four steps correspond to a rotor movement
of one tooth pitch of (360/p)° and for the hybrid motor.
𝑠𝑡𝑒𝑝 𝑙𝑒𝑛𝑔𝑡ℎ = (90 𝑝⁄ )° (2.26)
The motor illustrated in Figure 2.18 has 18 rotor teeth, then the step length is equal to 5°.
Hybrid motors are usually manufactured with smaller step lengths: the motor illustrated in
Figure 2.19 has 50 rotor teeth and a step length of 1.8° (Acarnley, 2007).
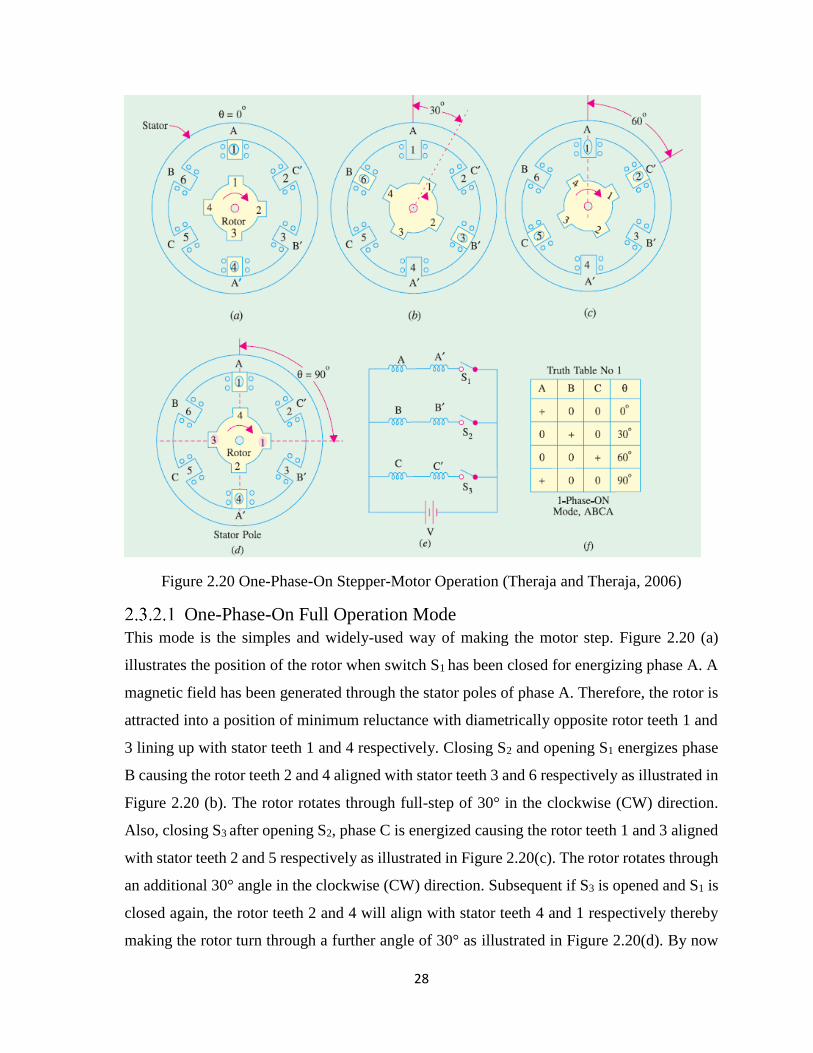
2.3.2 Operation Mode
The operation or stepping mode can be summarized into four stepping modes: one- phase on,
two-phase-on, half-step and micro-stepping mode. To explain the operation modes, the simple
circuit illustrated in Figure 2.20(e) has been used for supplying current to the stator coil in
proper sequence. The step-angle of these three phases, four rotor teeth motor illustrated in
Figure 2.20 can be obtained by equation 2.27 (Theraja and Theraja, 2006):
𝛽 = 3604 × 3⁄ = 30ᴼ (2.27)
Figure 2.19 Commercial Hybrid Stepping Motor (Acarnley, 2007)
28
Figure 2.20 One-Phase-On Stepper-Motor Operation (Theraja and Theraja, 2006)
One-Phase-On Full Operation Mode
This mode is the simples and widely-used way of making the motor step. Figure 2.20 (a)
illustrates the position of the rotor when switch S1 has been closed for energizing phase A. A
magnetic field has been generated through the stator poles of phase A. Therefore, the rotor is
attracted into a position of minimum reluctance with diametrically opposite rotor teeth 1 and
3 lining up with stator teeth 1 and 4 respectively. Closing S2 and opening S1 energizes phase
B causing the rotor teeth 2 and 4 aligned with stator teeth 3 and 6 respectively as illustrated in
Figure 2.20 (b). The rotor rotates through full-step of 30° in the clockwise (CW) direction.
Also, closing S3 after opening S2, phase C is energized causing the rotor teeth 1 and 3 aligned
with stator teeth 2 and 5 respectively as illustrated in Figure 2.20(c). The rotor rotates through
an additional 30° angle in the clockwise (CW) direction. Subsequent if S3 is opened and S1 is
closed again, the rotor teeth 2 and 4 will align with stator teeth 4 and 1 respectively thereby
making the rotor turn through a further angle of 30° as illustrated in Figure 2.20(d). By now
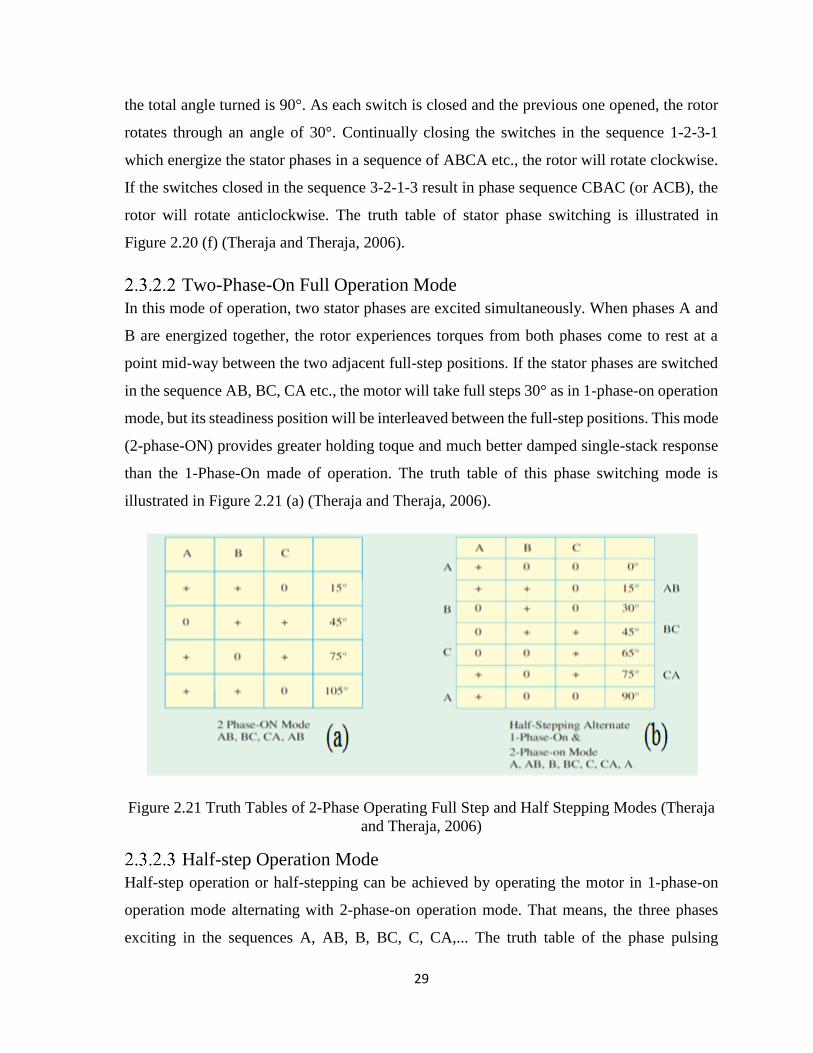
29
the total angle turned is 90°. As each switch is closed and the previous one opened, the rotor
rotates through an angle of 30°. Continually closing the switches in the sequence 1-2-3-1
which energize the stator phases in a sequence of ABCA etc., the rotor will rotate clockwise.
If the switches closed in the sequence 3-2-1-3 result in phase sequence CBAC (or ACB), the
rotor will rotate anticlockwise. The truth table of stator phase switching is illustrated in
Figure 2.20 (f) (Theraja and Theraja, 2006).
Two-Phase-On Full Operation Mode
In this mode of operation, two stator phases are excited simultaneously. When phases A and
B are energized together, the rotor experiences torques from both phases come to rest at a
point mid-way between the two adjacent full-step positions. If the stator phases are switched
in the sequence AB, BC, CA etc., the motor will take full steps 30° as in 1-phase-on operation
mode, but its steadiness position will be interleaved between the full-step positions. This mode
(2-phase-ON) provides greater holding toque and much better damped single-stack response
than the 1-Phase-On made of operation. The truth table of this phase switching mode is
illustrated in Figure 2.21 (a) (Theraja and Theraja, 2006).
Figure 2.21 Truth Tables of 2-Phase Operating Full Step and Half Stepping Modes (Theraja
and Theraja, 2006)
Half-step Operation Mode
Half-step operation or half-stepping can be achieved by operating the motor in 1-phase-on
operation mode alternating with 2-phase-on operation mode. That means, the three phases
exciting in the sequences A, AB, B, BC, C, CA,... The truth table of the phase pulsing
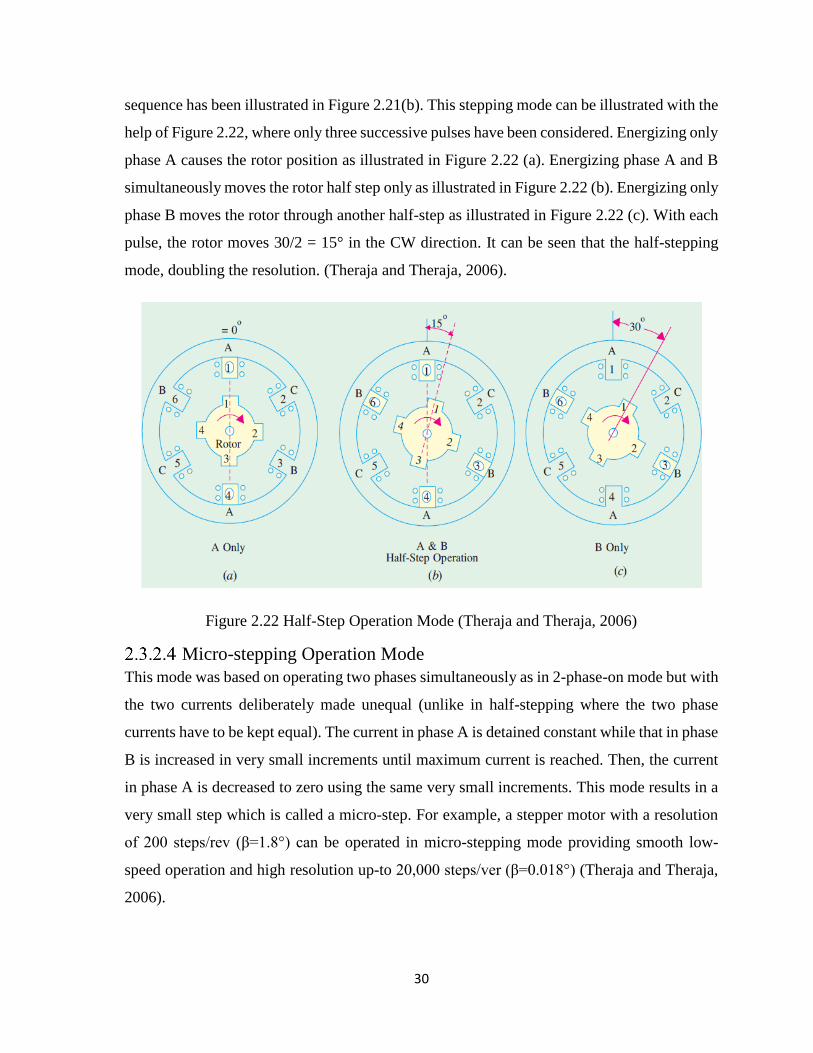
30
sequence has been illustrated in Figure 2.21(b). This stepping mode can be illustrated with the
help of Figure 2.22, where only three successive pulses have been considered. Energizing only
phase A causes the rotor position as illustrated in Figure 2.22 (a). Energizing phase A and B
simultaneously moves the rotor half step only as illustrated in Figure 2.22 (b). Energizing only
phase B moves the rotor through another half-step as illustrated in Figure 2.22 (c). With each
pulse, the rotor moves 30/2 = 15° in the CW direction. It can be seen that the half-stepping
mode, doubling the resolution. (Theraja and Theraja, 2006).
Figure 2.22 Half-Step Operation Mode (Theraja and Theraja, 2006)
Micro-stepping Operation Mode
This mode was based on operating two phases simultaneously as in 2-phase-on mode but with
the two currents deliberately made unequal (unlike in half-stepping where the two phase
currents have to be kept equal). The current in phase A is detained constant while that in phase
B is increased in very small increments until maximum current is reached. Then, the current
in phase A is decreased to zero using the same very small increments. This mode results in a
very small step which is called a micro-step. For example, a stepper motor with a resolution
of 200 steps/rev (β=1.8°) can be operated in micro-stepping mode providing smooth low-
speed operation and high resolution up-to 20,000 steps/ver (β=0.018°) (Theraja and Theraja,
2006).
31
2.3.3 Choosing a Motor
Several factors must be considered when choosing a stepping motor for a specific application.
Some of these factors are the motor type, required torque, features of the controller and
physical characteristics of the motor. The following paragraphs discuss some of these
considerations (Condit and Jones, 2004).
Variable Reluctance versus Permanent Magnet or Hybrid
Variable reluctance motors (VRM) have very simple design. They are generally more robust
than permanent magnet motors (Condit and Jones, 2004).
For all stepping motors, the torque drops with increased motor speed. The variable reluctance
motors have the less drop in torque with speed when compared with hybrid and permanent
magnet motors (Condit and Jones, 2004).
With sinusoidal exciting currents, variable reluctance motors are very noisy. In contrast,
permanent magnet and hybrid motors are generally quiet. As a result, permanent magnet or
hybrid motors are typically preferred where noise or vibration are issues (Condit and Jones,
2004).
Unlike variable reluctance motors, the permanent magnets in hybrid and permanent magnet
motors attract the stator poles even when there is no power. This magnetic residual holding
torque is desirable in some applications, but it can be a source of problems if smooth sailing
is required (Condit and Jones, 2004).
Both hybrid and permanent magnet motors can be operated in micro-stepping mode allowing
smooth, jerk-free moves from step to the next one. This operation mode is not applicable in
all variable reluctance motors. Variable reluctance motors are typically run in full-step (Condit
and Jones, 2004).
Hybrid versus Permanent Magnet
The two primary issues that have been considered in selecting between hybrid and permanent
magnet motors are cost and resolution. The stator of permanent magnet motors are constructed
as a stack of two windings surrounded in metal stampings that resemble tin cans, so sometimes
they are defined as can-stack motors and almost inexpensive to manufacture. In contrast,
hybrid motors are made by stacked laminations with motor windings that are significantly
more difficult to wind and almost expensive to manufacture (Condit and Jones, 2004).
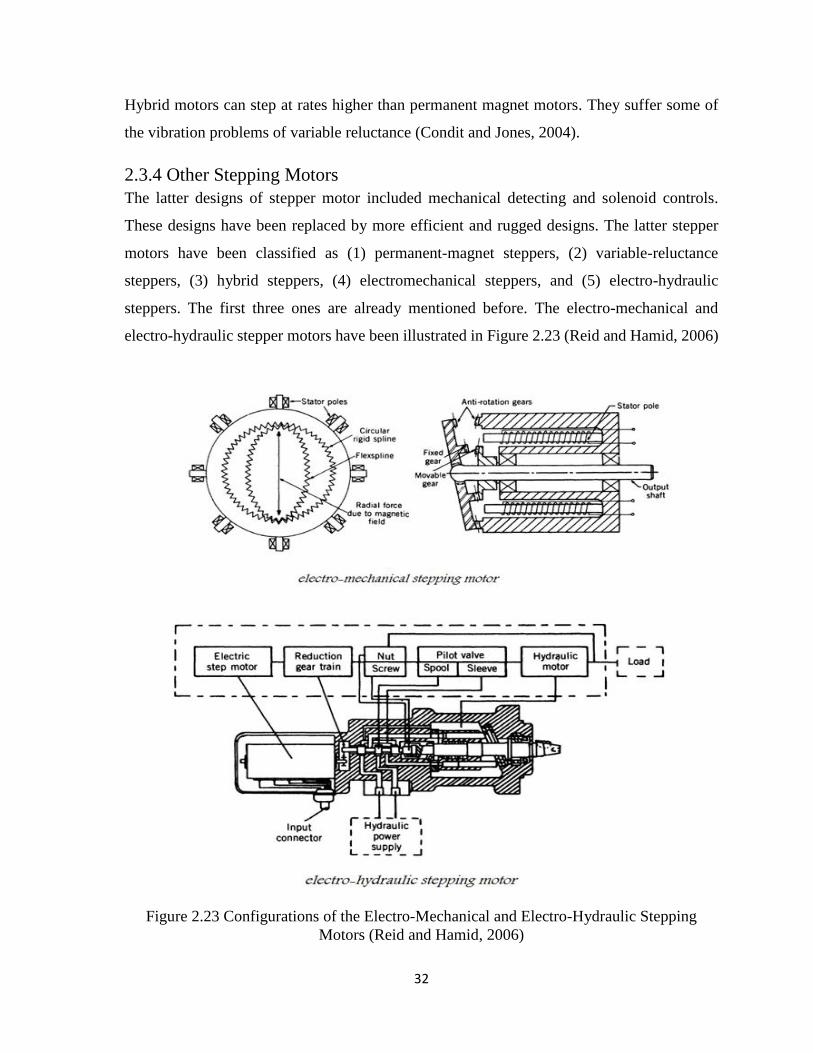
32
Hybrid motors can step at rates higher than permanent magnet motors. They suffer some of
the vibration problems of variable reluctance (Condit and Jones, 2004).
2.3.4 Other Stepping Motors
The latter designs of stepper motor included mechanical detecting and solenoid controls.
These designs have been replaced by more efficient and rugged designs. The latter stepper
motors have been classified as (1) permanent-magnet steppers, (2) variable-reluctance
steppers, (3) hybrid steppers, (4) electromechanical steppers, and (5) electro-hydraulic
steppers. The first three ones are already mentioned before. The electro-mechanical and
electro-hydraulic stepper motors have been illustrated in Figure 2.23 (Reid and Hamid, 2006)
Figure 2.23 Configurations of the Electro-Mechanical and Electro-Hydraulic Stepping
Motors (Reid and Hamid, 2006)
33
2.4 Motion Control Systems
A modern motion control system typically consists of a motion controller, a motor drive, an
electric motor and feedback sensors. A motion controller today can be a standalone
programmable controller, a personal computer containing a motion control card or a
programmable logic controller (PLC).
All of the components of a motion control system must work together seamlessly to achieve
their assigned functions. Selection of these components must be based on both engineering
and economic considerations (Sandin, 2003).
2.4.1 Merits of Electric Systems
Most modern motion control systems are powered by electric motors rather than hydraulic or
pneumatic motors or actuators because of the bellow benefits that they offer:
Simple designing, programming and installing.
Extra precise load positioning.
High flexibility, efficiency and capacity.
Few product or process defects.
Clean and quiet operation without any oil or air leakage.
Low maintenance costs (Sandin, 2003).
2.4.2 Motion Control Classification
Motion control systems can be classified as closed-loop or open-loop. A closed-loop system
requires feedback sensors that measure the output variables and provide error-correcting
signals. In contrast, an open-loop system does not require any measurements of output
variables (Sandin, 2003).
Closed-Loop System
A closed-loop motion control system block diagram illustrated in Figure 2.24, has one or more
feedback loops that continuously compare the system’s response with input commands or
settings to correct errors in: motor speed, position and torque as well as load position.
Feedback sensors provide the electronic signals for correcting deviations from the desired
input commands. Closed-loop systems are also called servo-systems (Sandin, 2003).
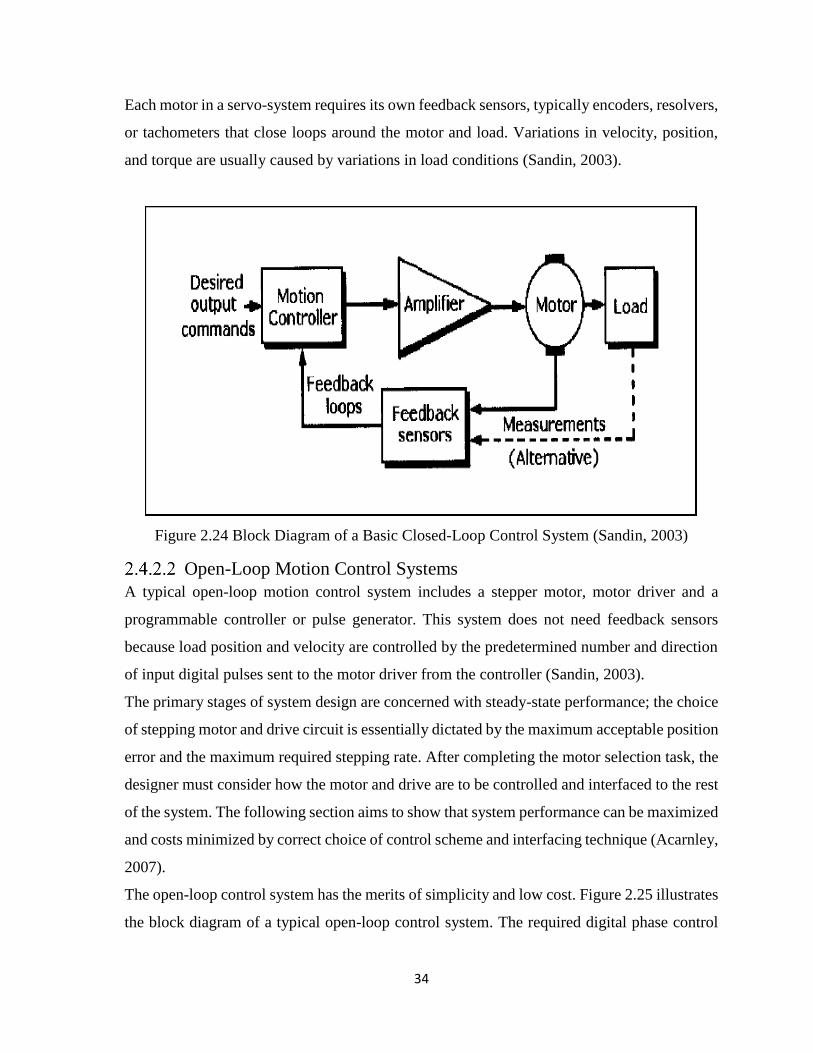
34
Each motor in a servo-system requires its own feedback sensors, typically encoders, resolvers,
or tachometers that close loops around the motor and load. Variations in velocity, position,
and torque are usually caused by variations in load conditions (Sandin, 2003).
Figure 2.24 Block Diagram of a Basic Closed-Loop Control System (Sandin, 2003)
Open-Loop Motion Control Systems
A typical open-loop motion control system includes a stepper motor, motor driver and a
programmable controller or pulse generator. This system does not need feedback sensors
because load position and velocity are controlled by the predetermined number and direction
of input digital pulses sent to the motor driver from the controller (Sandin, 2003).
The primary stages of system design are concerned with steady-state performance; the choice
of stepping motor and drive circuit is essentially dictated by the maximum acceptable position
error and the maximum required stepping rate. After completing the motor selection task, the
designer must consider how the motor and drive are to be controlled and interfaced to the rest
of the system. The following section aims to show that system performance can be maximized
and costs minimized by correct choice of control scheme and interfacing technique (Acarnley,
2007).
The open-loop control system has the merits of simplicity and low cost. Figure 2.25 illustrates
the block diagram of a typical open-loop control system. The required digital phase control
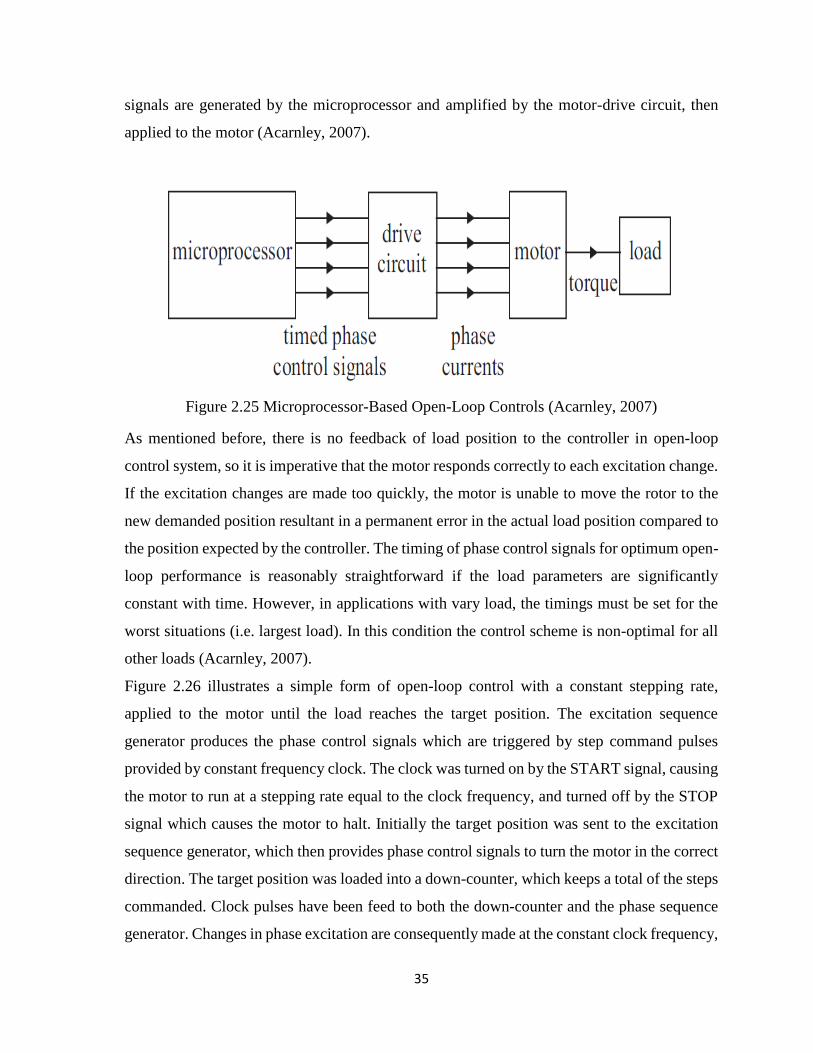
35
signals are generated by the microprocessor and amplified by the motor-drive circuit, then
applied to the motor (Acarnley, 2007).
Figure 2.25 Microprocessor-Based Open-Loop Controls (Acarnley, 2007)
As mentioned before, there is no feedback of load position to the controller in open-loop
control system, so it is imperative that the motor responds correctly to each excitation change.
If the excitation changes are made too quickly, the motor is unable to move the rotor to the
new demanded position resultant in a permanent error in the actual load position compared to
the position expected by the controller. The timing of phase control signals for optimum open-
loop performance is reasonably straightforward if the load parameters are significantly
constant with time. However, in applications with vary load, the timings must be set for the
worst situations (i.e. largest load). In this condition the control scheme is non-optimal for all
other loads (Acarnley, 2007).
Figure 2.26 illustrates a simple form of open-loop control with a constant stepping rate,
applied to the motor until the load reaches the target position. The excitation sequence
generator produces the phase control signals which are triggered by step command pulses
provided by constant frequency clock. The clock was turned on by the START signal, causing
the motor to run at a stepping rate equal to the clock frequency, and turned off by the STOP
signal which causes the motor to halt. Initially the target position was sent to the excitation
sequence generator, which then provides phase control signals to turn the motor in the correct
direction. The target position was loaded into a down-counter, which keeps a total of the steps
commanded. Clock pulses have been feed to both the down-counter and the phase sequence
generator. Changes in phase excitation are consequently made at the constant clock frequency,
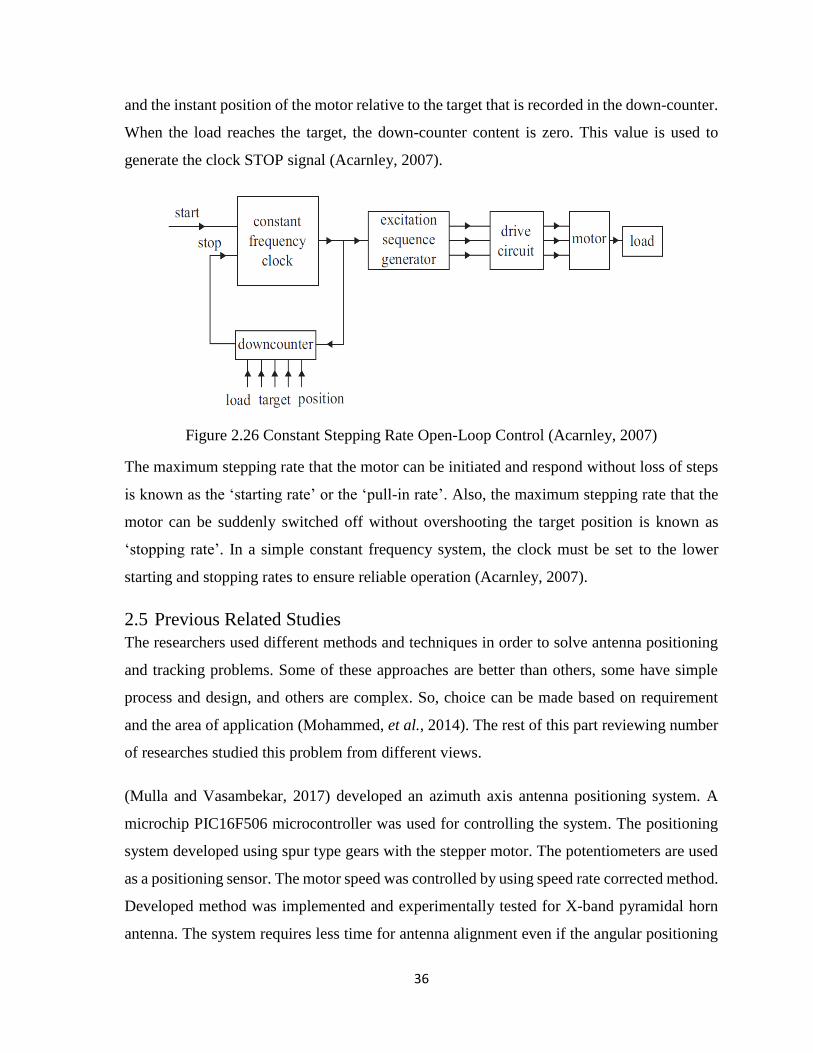
36
and the instant position of the motor relative to the target that is recorded in the down-counter.
When the load reaches the target, the down-counter content is zero. This value is used to
generate the clock STOP signal (Acarnley, 2007).
Figure 2.26 Constant Stepping Rate Open-Loop Control (Acarnley, 2007)
The maximum stepping rate that the motor can be initiated and respond without loss of steps
is known as the ‘starting rate’ or the ‘pull-in rate’. Also, the maximum stepping rate that the
motor can be suddenly switched off without overshooting the target position is known as
‘stopping rate’. In a simple constant frequency system, the clock must be set to the lower
starting and stopping rates to ensure reliable operation (Acarnley, 2007).
2.5 Previous Related Studies
The researchers used different methods and techniques in order to solve antenna positioning
and tracking problems. Some of these approaches are better than others, some have simple
process and design, and others are complex. So, choice can be made based on requirement
and the area of application (Mohammed, et al., 2014). The rest of this part reviewing number
of researches studied this problem from different views.
(Mulla and Vasambekar, 2017) developed an azimuth axis antenna positioning system. A
microchip PIC16F506 microcontroller was used for controlling the system. The positioning
system developed using spur type gears with the stepper motor. The potentiometers are used
as a positioning sensor. The motor speed was controlled by using speed rate corrected method.
Developed method was implemented and experimentally tested for X-band pyramidal horn
antenna. The system requires less time for antenna alignment even if the angular positioning
37
error is large. It is a low cost solution for fast and large antenna alignment for the desired
satellite (Mulla and Vasambekar, 2017).
(Linus Aloo, et al., 2016) addressed antenna positioning control system that was based on DC
servomotor. The design was simulated in MATLAB/SIMULINK software. The research aims
to minimize the deviations from the desired position. Proportional-integral-derivative (PID)
controller was used in the first test. The obtained results of the tuned PID controller were
improved by adding linear quadratic regulator (LQR) which apart from optimizing the system
response increases the accuracy of the state variables by estimating the states. The results
show that the performance of the hybrid PID-LQR controller is much better than that of the
PID controller in terms of reduced settling time and overshoot (Linus Aloo, et al., 2016).
(Prajwal, et al., 2015) proposed system helps in adjusting the dish antenna position remotely
by using smart-phone/tablet operating android application program. The smart-phone/tablet
acts as a transmitter which sends data to Arduino microcontroller via Bluetooth device. The
micro-controller manages motor motion by sending control signals to the motors-drivers. The
proposed system controls the dish rotation in two axes (X and Y). System measurements were
carried out using the fully functional but not optimal device built on the breadboard (Prajwal,
et al., 2015).
(Rajini and Murthy, 2015) discussed an antenna servo control system for remote sensing
satellite ground station. The mathematical model of servo control system was presented. A
close loop system using PID controller was demonstrated. System stability conditions were
verified. The performance of the system increases by implementing a fuzzy controller.
(Abdul Rehman, et al., 2014) studied the design and implementation of azimuth antenna
position control system. The response of the system without using any controller was studied
and noticed that the response was not good. For getting a better response, a PID controller has
been used. Then LQR controller was added to the deigned system so as to get better response
in case of disturbance. The study illustrates that the LQR results are much better than the
results obtained by PID controller (Abdul Rehman, et al., 2014).
38
(Singh, et al., 2013) described a design and modeling concepts of control system for ground
station antenna for remote sensing satellite tracking. The system uses orbit prediction tracking
(OPT) for X-band ground station antenna servo system. The article aims to driver 4.5 m
antenna system involving integration of drive chains for elevation and azimuth axes of
antenna. Optimization and tuning of the entire integrated system uses the approximations
obtained from the mathematical model and simulation studies. To predict and optimize the
practical system a PID controller variables have been used. It has been established with
elevation and azimuth axes, initially tuned with proportional variables then integral and lastly
with derivative. The results of the study show that the experimental and simulation results
were close and almost same in response (Singh, et al., 2013).
(Okumus, et al., 2013) studied an antenna azimuth position control system. A self-tuning
fuzzy logic controller (STFLC) was proposed which was designed via Matlab/Simulink
environment. The proposed controller was used to control the antenna positioning system with
other controllers, classic proportional-integral controller (PI) and fuzzy logic controller (FLC).
The simulation results observed that the proposed STFLC gives results better than the PID
and FLC (Okumus, et al., 2013).
(Me. Me, et al., 2012) developed a satellite-dish positioning close-loop control system by
using DC motor and IR-remote control. The designed system was based on microcontroller
of PIC 16F877A, servo mechanism based on relay driver and DC motor. The microcontroller
was connected to IR-receiver. An IR-remote control was used as a transmitter which was
sending 12 bits decoded data to the microcontroller through IR-receiver. The microcontroller
sends the control signal to the DC motor through an interface known as relay driver. Reed
sensor switch was used to feedback the system. Also limit switches were used to protect the
system. This system was implemented by using Basic pro language (Me. Me, et al., 2012).
(Rafael, et al., 2012) presented and discussed the result of an automated system developed for
maneuvering of the parabolic reflector antenna of a satellite communication. The system used
data about the satellite available for transmission in broadcasting in specific area (Brazil). It
was developed based on the procedures for the manual maneuvering a satellite dish. The study
mainly focuses on designed and developed a control system antenna maneuvering using Java
39
programming language. The method used a S3A which integrates a database that contains the
position of the available satellites in that area (Brazil). Then the S3A generates reference
positions. By choosing the intended satellite, the S3A produces the reference position that
was used by the servo-mechanism to direct the antenna. Then start processing the C/N and
making a fine adjustment of the position of the antenna so as to improve signal reception. The
fine tuning process employs a fuzzy controller which uses 63 rules generated based on the
procedures followed in manual maneuvering a satellite. The results illustrate that the presented
system performed the alignment process into 3 minutes instead of 50 minutes taken in the
manual process (Rafael, et al., 2012).
(Wang, et al., 2011) proposed a parabolic antenna position controller using a digital signal
processor (DSP). The system used PI controller and a permanent magnet synchronous motor
(PMSM). The system was simulated, implemented and tested. The results show that the
designed servo system has a good performance and it can be implemented in practical
application (Wang, et al., 2011).
A satellite antenna position controller was developed by (Jia, et al., 2009). The controller used
adaptive variable structure with the aim of getting rid of the problem of model uncertainties
achieved using the feed-forward compensation technique. Tests conducted using the satellite
antenna pointing compound full-physical simulation system and the results showed that the
controller had improved the pointing accuracy of the system (Jia, et al., 2009).
(He, et al., 2009) developed a combined proportional-integral and linear quadratic gaussian
controller so as to solve the problem of position control accuracy and wind gust rejection for
the 34m diameter cassegrain antenna operating in S, X and Ka-Bands. State estimation and
optimal control techniques were used for implementing this controller. The performance of
the controller was compared with that of a proportional-integral controller. The results
presented that the combined control scheme was able to satisfy the pointing precision of up to
the Ka-band Frequency with good disturbance rejection while the proportional-integral
controller only satisfied for up to the X-Band with system disturbance velocity up to 10m/s
(He, et al., 2009).
40
(Russell and Callum, 2008) concerned with designing and implementing a computer based
system for controlling elevation over azimuth tracking platform as well as developing an
application program interface (API). The API provides a number of methods for controlling
the antenna-platform position and movement in both azimuth and elevation. The system uses
the parallel port (LPT) for interfacing between the computer and the control hardware. The
system driver was developed in an open source environment (Ubuntu 8.04.1 LTS-Hardy
Heron) with a Linux kernel version of 2.6.24.21. The positioning accuracy of azimuth,
elevation axes were calculated to be within 0.2915° for azimuth and 0.0193° for elevation
(Russell and Callum, 2008).
(Bhuyan, 2007) presented a design and implementation of wireless dish antenna control
system using DC motor and microcomputer. The designed system was used to direct small-
dish to the desired angles entered to the system by using the keyboard. The dish was directed
vertically and horizontally (azimuth, elevation) by using two DC motors. The control driver
was located in a PC. An infrared transmitter-receiver system was developed to send and
receive the required signals between the PC (through the LPT) and the circuit used to control
the motor’s rotation as well as speed. Automatic calibration method has also been integrated
to calibrate the system any time. The study represents that since the infrared signals were
used, the photo-detector can be affected by ambient lights. Also the data maybe loss during
the wireless communication. That means the dish may not be positioned properly to the
correct position (Bhuyan, 2007).
(Pran, et al., 1998) presents a control system to position a small dish antenna. The system was
based on microcomputer and two DC motors to direct the dish (one for azimuth and the other
for elevation). The microcomputer controls the two motors by forwarding pulses generated by
developed software. The system inputs were the angles to be rotated in azimuth and elevation.
Those angles were obtained by the pulse width of the signals sent from the microcomputer to
the motor through the parallel port so as to rotate the dish to the desired position. The study
represents that the system may need to be recalibrated due to aging that affects the system
hardware. Also the study recommends including an auto-calibration technique to the designed
system (Pran, et al., 1998).

41
Table 2.2 summarizes the remarks on the related studies into a number of points and can be
arranged into; design complexity, tuning complications, significant delay in dish-antenna
directing time, using two factors (azimuth/elevation) to direct the antenna and needing more
controller to improve the performance.
In this research the polarization factor is considered and straight open-loop control method is
used to avoid the design complexity, tuning complexity and enhance the dish-antenna
directing time by using new technology.
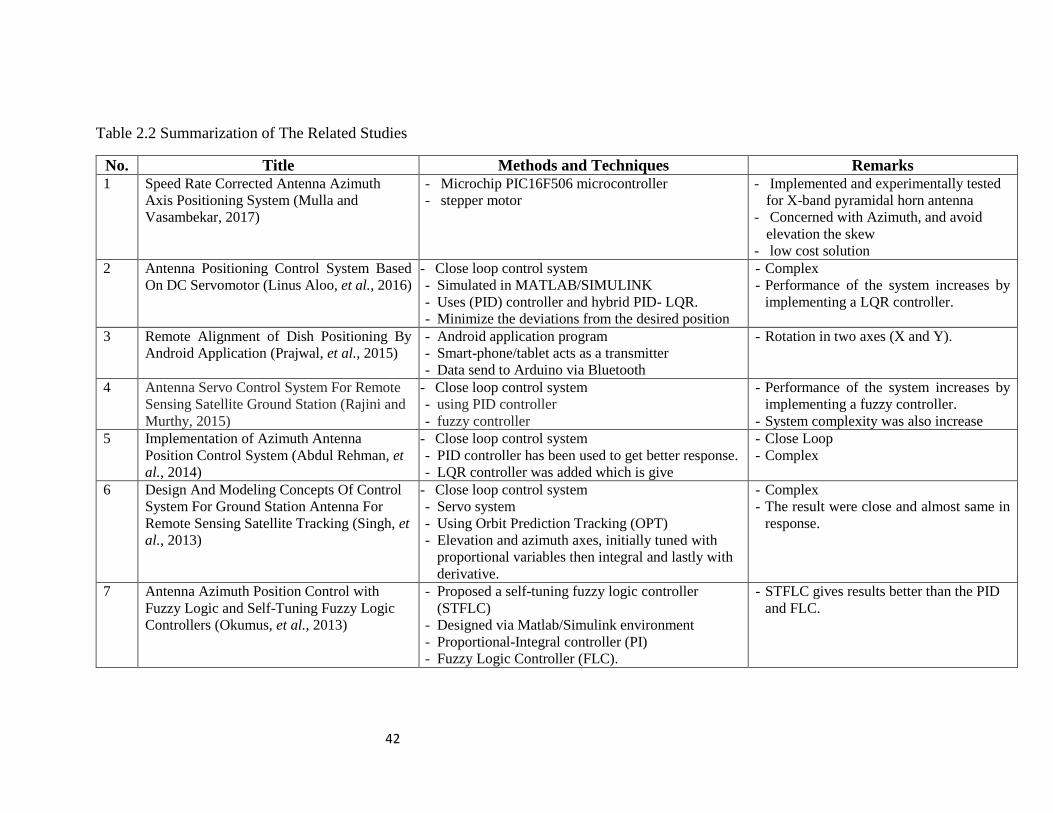
42
Table 2.2 Summarization of The Related Studies
No. Title Methods and Techniques Remarks 1 Speed Rate Corrected Antenna Azimuth
Axis Positioning System (Mulla and
Vasambekar, 2017)
- Microchip PIC16F506 microcontroller
- stepper motor
- Implemented and experimentally tested
for X-band pyramidal horn antenna
- Concerned with Azimuth, and avoid
elevation the skew
- low cost solution
2 Antenna Positioning Control System Based
On DC Servomotor (Linus Aloo, et al., 2016)
- Close loop control system
- Simulated in MATLAB/SIMULINK
- Uses (PID) controller and hybrid PID- LQR.
- Minimize the deviations from the desired position
- Complex
- Performance of the system increases by
implementing a LQR controller.
3 Remote Alignment of Dish Positioning By
Android Application (Prajwal, et al., 2015)
- Android application program
- Smart-phone/tablet acts as a transmitter
- Data send to Arduino via Bluetooth
- Rotation in two axes (X and Y).
4 Antenna Servo Control System For Remote
Sensing Satellite Ground Station (Rajini and
Murthy, 2015)
- Close loop control system
- using PID controller
- fuzzy controller
- Performance of the system increases by
implementing a fuzzy controller.
- System complexity was also increase
5 Implementation of Azimuth Antenna
Position Control System (Abdul Rehman, et
al., 2014)
- Close loop control system
- PID controller has been used to get better response.
- LQR controller was added which is give
- Close Loop
- Complex
6 Design And Modeling Concepts Of Control
System For Ground Station Antenna For
Remote Sensing Satellite Tracking (Singh, et
al., 2013)
- Close loop control system
- Servo system
- Using Orbit Prediction Tracking (OPT)
- Elevation and azimuth axes, initially tuned with
proportional variables then integral and lastly with
derivative.
- Complex
- The result were close and almost same in
response.
7 Antenna Azimuth Position Control with
Fuzzy Logic and Self-Tuning Fuzzy Logic
Controllers (Okumus, et al., 2013)
- Proposed a self-tuning fuzzy logic controller
(STFLC)
- Designed via Matlab/Simulink environment
- Proportional-Integral controller (PI)
- Fuzzy Logic Controller (FLC).
- STFLC gives results better than the PID
and FLC.
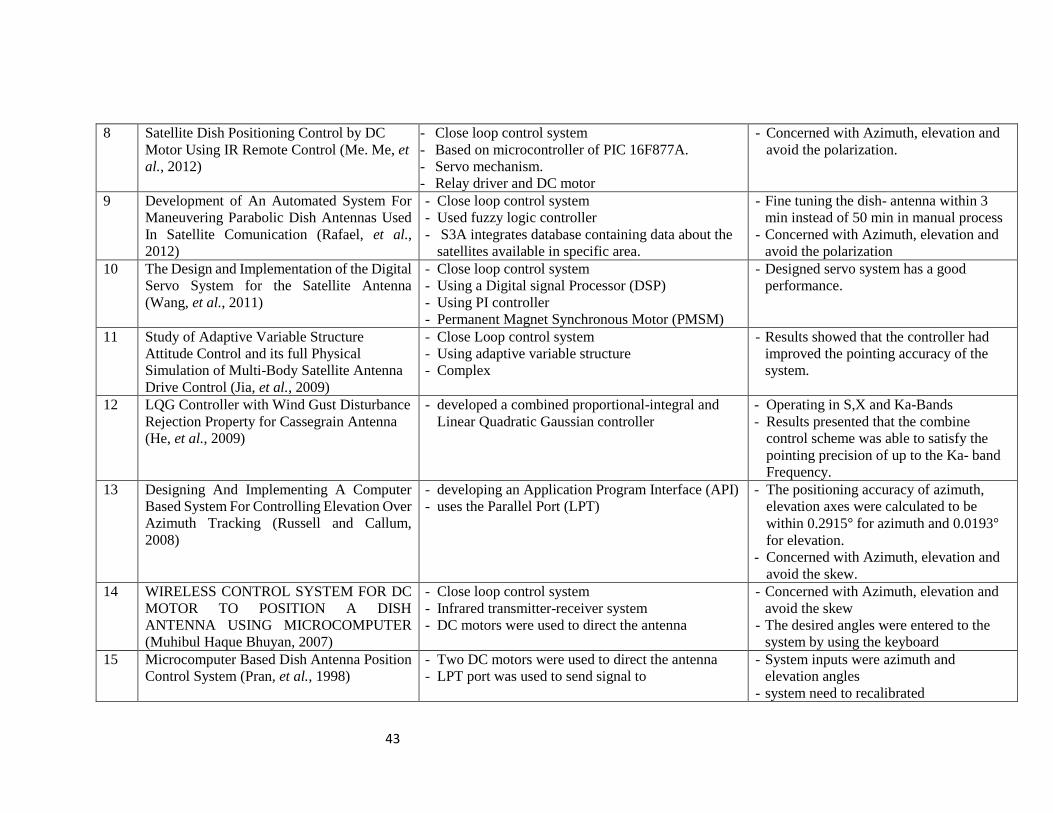
43
8 Satellite Dish Positioning Control by DC
Motor Using IR Remote Control (Me. Me, et
al., 2012)
- Close loop control system
- Based on microcontroller of PIC 16F877A.
- Servo mechanism.
- Relay driver and DC motor
- Concerned with Azimuth, elevation and
avoid the polarization.
9 Development of An Automated System For
Maneuvering Parabolic Dish Antennas Used
In Satellite Comunication (Rafael, et al.,
2012)
- Close loop control system
- Used fuzzy logic controller
- S3A integrates database containing data about the
satellites available in specific area.
- Fine tuning the dish- antenna within 3
min instead of 50 min in manual process
- Concerned with Azimuth, elevation and
avoid the polarization
10 The Design and Implementation of the Digital
Servo System for the Satellite Antenna
(Wang, et al., 2011)
- Close loop control system
- Using a Digital signal Processor (DSP)
- Using PI controller
- Permanent Magnet Synchronous Motor (PMSM)
- Designed servo system has a good
performance.
11 Study of Adaptive Variable Structure
Attitude Control and its full Physical
Simulation of Multi-Body Satellite Antenna
Drive Control (Jia, et al., 2009)
- Close Loop control system
- Using adaptive variable structure
- Complex
- Results showed that the controller had
improved the pointing accuracy of the
system.
12 LQG Controller with Wind Gust Disturbance
Rejection Property for Cassegrain Antenna
(He, et al., 2009)
- developed a combined proportional-integral and
Linear Quadratic Gaussian controller
- Operating in S,X and Ka-Bands
- Results presented that the combine
control scheme was able to satisfy the
pointing precision of up to the Ka- band
Frequency.
13 Designing And Implementing A Computer
Based System For Controlling Elevation Over
Azimuth Tracking (Russell and Callum,
2008)
- developing an Application Program Interface (API)
- uses the Parallel Port (LPT)
- The positioning accuracy of azimuth,
elevation axes were calculated to be
within 0.2915° for azimuth and 0.0193°
for elevation.
- Concerned with Azimuth, elevation and
avoid the skew.
14 WIRELESS CONTROL SYSTEM FOR DC
MOTOR TO POSITION A DISH
ANTENNA USING MICROCOMPUTER
(Muhibul Haque Bhuyan, 2007)
- Close loop control system
- Infrared transmitter-receiver system
- DC motors were used to direct the antenna
- Concerned with Azimuth, elevation and
avoid the skew
- The desired angles were entered to the
system by using the keyboard
15 Microcomputer Based Dish Antenna Position
Control System (Pran, et al., 1998)
- Two DC motors were used to direct the antenna
- LPT port was used to send signal to
- System inputs were azimuth and
elevation angles
- system need to recalibrated
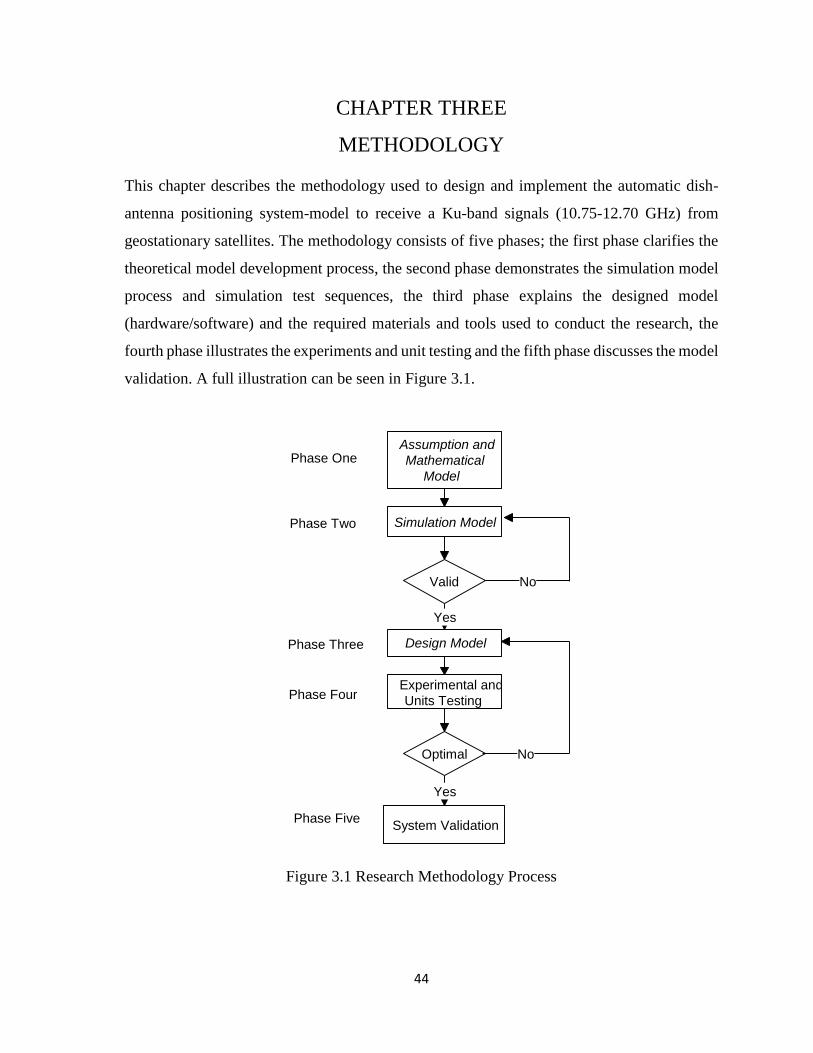
44
CHAPTER THREE
3 METHODOLOGY
This chapter describes the methodology used to design and implement the automatic dish-
antenna positioning system-model to receive a Ku-band signals (10.75-12.70 GHz) from
geostationary satellites. The methodology consists of five phases; the first phase clarifies the
theoretical model development process, the second phase demonstrates the simulation model
process and simulation test sequences, the third phase explains the designed model
(hardware/software) and the required materials and tools used to conduct the research, the
fourth phase illustrates the experiments and unit testing and the fifth phase discusses the model
validation. A full illustration can be seen in Figure 3.1.
Figure 3.1 Research Methodology Process
Assumption and Mathematical
Model
Simulation Model
Design Model
Phase One
Phase Four
System Validation Phase Five
Valid No No
Yes Yes
Phase Two
Phase Three
Optimal No No
Yes Yes
Experimental and Units Testing
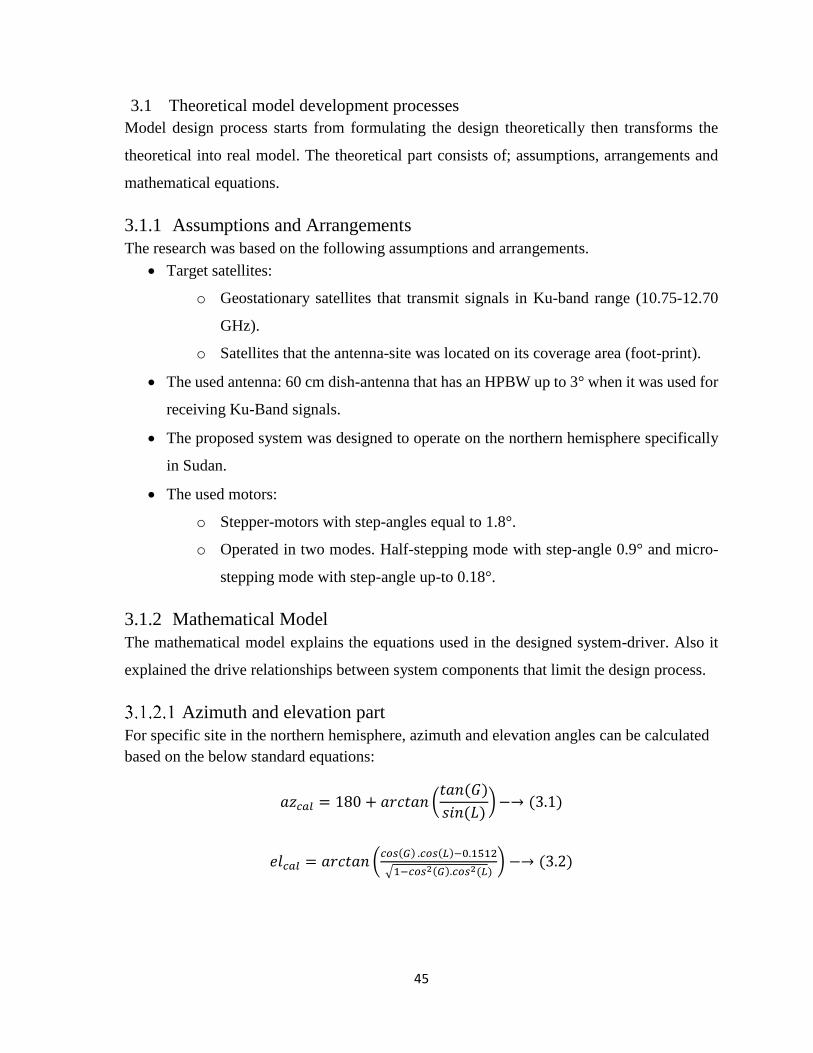
45
3.1 Theoretical model development processes
Model design process starts from formulating the design theoretically then transforms the
theoretical into real model. The theoretical part consists of; assumptions, arrangements and
mathematical equations.
3.1.1 Assumptions and Arrangements
The research was based on the following assumptions and arrangements.
Target satellites:
o Geostationary satellites that transmit signals in Ku-band range (10.75-12.70
GHz).
o Satellites that the antenna-site was located on its coverage area (foot-print).
The used antenna: 60 cm dish-antenna that has an HPBW up to 3° when it was used for
receiving Ku-Band signals.
The proposed system was designed to operate on the northern hemisphere specifically
in Sudan.
The used motors:
o Stepper-motors with step-angles equal to 1.8°.
o Operated in two modes. Half-stepping mode with step-angle 0.9° and micro-
stepping mode with step-angle up-to 0.18°.
3.1.2 Mathematical Model
The mathematical model explains the equations used in the designed system-driver. Also it
explained the drive relationships between system components that limit the design process.
Azimuth and elevation part
For specific site in the northern hemisphere, azimuth and elevation angles can be calculated
based on the below standard equations:
𝑎𝑧𝑐𝑎𝑙 = 180 + 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑡𝑎𝑛(𝐺)
𝑠𝑖𝑛(𝐿))−→ (3.1)
𝑒𝑙𝑐𝑎𝑙 = 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑐𝑜𝑠(𝐺) .𝑐𝑜𝑠(𝐿)−0.1512
√1−𝑐𝑜𝑠2(𝐺).𝑐𝑜𝑠2(𝐿)) −→ (3.2)

46
Where:
𝑎𝑧𝑐𝑎𝑙= azimuth of antenna in degrees
𝑒𝑙𝑐𝑎𝑙=elevation of antenna in degrees
S= sub-satellite point longitude in degrees
N= site longitude in degrees
L= site latitude in degrees
G= S-N
The calculated angles in the above section transformed into a number of steps based on step-
angle of the used stepper-motors. The transformation was done as follows:
𝑎𝑧 =𝑎𝑧𝑐𝑎𝑙𝛽𝑎𝑧
−→ (3.3)
𝑒𝑙 =𝑒𝑙𝑐𝑎𝑙𝛽𝑒𝑙
−→ (3.4)
Where:
𝛽𝑎𝑧 = 𝑆𝑡𝑒𝑝 𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡ℎ𝑒 𝑎𝑧𝑖𝑚𝑢𝑡ℎ 𝑚𝑜𝑡𝑜𝑟
𝛽𝑒𝑙 = 𝑆𝑡𝑒𝑝 𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡ℎ𝑒 𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 𝑚𝑜𝑡𝑜𝑟
The stepping-motor does not offer all calculated positions. It divides the looking radius into
discrete positions based on the step-angle. So, the calculated values in the above equations
(az, and el) maybe integer number (aligned with a discrete position) or float (contents fraction)
that means, it placed between two discrete positions. For all cases, the calculated look-angle
(azimuth, elevation) will drop within four integer cross-points as illustreated in Figure 3.2. So
the optimum choice will be the nearest cross point to the look-angle ( the nearest point to the
center of the main-lobe).
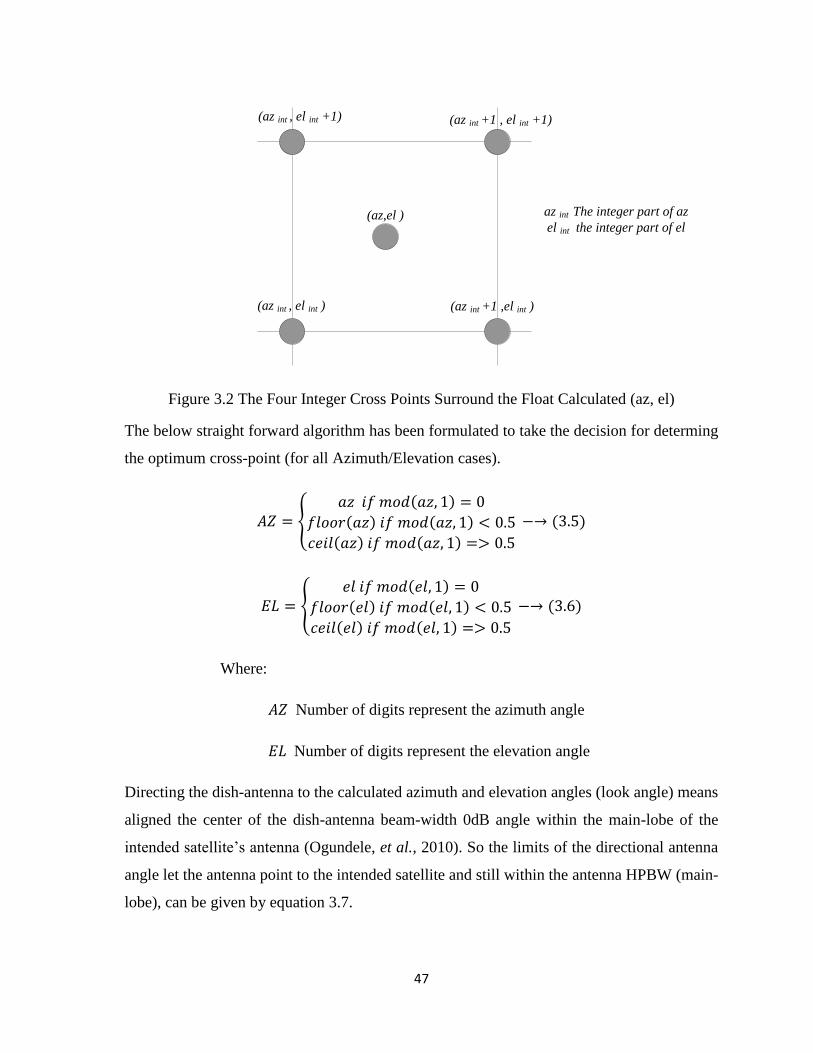
47
(az int +1 ,el int )
(az int , el int +1)
(az int , el int )
(az int +1 , el int +1)
(az,el ) az int The integer part of az
el int the integer part of el
Figure 3.2 The Four Integer Cross Points Surround the Float Calculated (az, el)
The below straight forward algorithm has been formulated to take the decision for determing
the optimum cross-point (for all Azimuth/Elevation cases).
𝐴𝑍 = 𝑎𝑧 𝑖𝑓 𝑚𝑜𝑑(𝑎𝑧, 1) = 0
𝑓𝑙𝑜𝑜𝑟(𝑎𝑧) 𝑖𝑓 𝑚𝑜𝑑(𝑎𝑧, 1) < 0.5
𝑐𝑒𝑖𝑙(𝑎𝑧) 𝑖𝑓 𝑚𝑜𝑑(𝑎𝑧, 1) => 0.5
−→ (3.5)
𝐸𝐿 = 𝑒𝑙 𝑖𝑓 𝑚𝑜𝑑(𝑒𝑙, 1) = 0
𝑓𝑙𝑜𝑜𝑟(𝑒𝑙) 𝑖𝑓 𝑚𝑜𝑑(𝑒𝑙, 1) < 0.5
𝑐𝑒𝑖𝑙(𝑒𝑙) 𝑖𝑓 𝑚𝑜𝑑(𝑒𝑙, 1) => 0.5
−→ (3.6)
Where:
𝐴𝑍 Number of digits represent the azimuth angle
𝐸𝐿 Number of digits represent the elevation angle
Directing the dish-antenna to the calculated azimuth and elevation angles (look angle) means
aligned the center of the dish-antenna beam-width 0dB angle within the main-lobe of the
intended satellite’s antenna (Ogundele, et al., 2010). So the limits of the directional antenna
angle let the antenna point to the intended satellite and still within the antenna HPBW (main-
lobe), can be given by equation 3.7.
48
𝑎𝑧𝑙𝑖𝑚𝑖𝑡 = (𝑎𝑧𝑐𝑎𝑙 ±𝐻𝑃𝐵𝑊
2)𝑑𝑒𝑔−→ (3.7)
To insure that the dish-antenna receives satellite signals, at least one of the cross-points
illustrated in Figure 3.2 must be located within the dish-antenna HPBW. In other words, the
nearest point that was chosen by the azimuth and elevation algorithms (3.5) and (3.6) must be
located within the dish-antenna main-lobe as shown in Figure 3.3.
Figure 3.3 Illustrates the Antenna Horizontals HPBW and the Calculated Azimuth Limits
That means:
𝑎𝑧𝑖𝑛𝑡 ∗ 𝛽𝑎𝑧 ≥ 𝑎𝑧𝑐𝑎𝑙 −𝐻𝑃𝐵𝑊
2 deg −→(3.8𝑎)
Or
(𝑎𝑧𝑖𝑛𝑡 + 1) ∗ 𝛽𝑎𝑧 ≤ 𝑎𝑧𝑐𝑎𝑙 +𝐻𝑃𝐵𝑊
2 deg−→(3.8𝑏)
Multiplying equation (3.8𝑎)*(-1) results in:
−𝑎𝑧𝑖𝑛𝑡 ∗ 𝛽𝑎𝑧 ≤ −𝑎𝑧𝑐𝑎𝑙 +𝐻𝑃𝐵𝑊
2 𝑑𝑒𝑔 −→ (3.9)
Adding equation (3.9) 𝑡𝑜 (3.8𝑏) results in:
𝛽𝑎𝑧 ≤ 2 ∗𝐻𝑃𝐵𝑊
2 deg−→(3.10𝑎)
Or
𝛽𝑎𝑧 ≤ 𝐻𝑃𝐵𝑊 deg−→ (3.10𝑏)

49
In this study, the used parabolic antenna had elliptical aperture. The HPBW in the horizontal
and vertical were around or equal. So the limitations administrate antenna HPBW and motor
step-angle in the horizontal axis (azimuth) can be generalized also in vertical (elevation). That
means:
𝛽𝑒𝑙 ≤ 𝐻𝑃𝐵𝑊 deg−→ (3.11)
The above azimuth/elevation calculations were the basic that the designed system uses to
position the antenna to the intended satellite in an accurate way.
Polarization Part
In linear polarization (Vertical and Horizontal) used in this research (Ku-band), the LNB must
be aligned with the polarization of the source signal (satellite signal). So the below
polarization angle calculations must be taken in account.
𝑝𝑜𝑙𝑐𝑎𝑙 = 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑠𝑖𝑛(𝐺)
𝑡𝑎𝑛(𝐿))−→ (3.12)
Where:
𝑝𝑜𝑙𝑐𝑎𝑙= polarization angle (skew angle) of the earth-station antenna
G= S-N
S= sub-satellite point longitude in degrees
N= site longitude in degrees
L= site latitude in degrees
Same as followed in azimuth and elevation angles, the calculated polarization-angle must be
changed into a number of steps based on the step-angle of the used stepper-motor:
𝑝𝑜𝑙 =𝑝𝑜𝑙𝑐𝑎𝑙𝛽𝑝𝑜𝑙
−→ (3.13)
Where:
𝛽𝑝𝑜𝑙 = 𝑆𝑡𝑒𝑝 𝑎𝑛𝑔𝑙𝑒 𝑜𝑓 𝑡ℎ𝑒 𝑝𝑜𝑙𝑎𝑟𝑖𝑧𝑎𝑡𝑖𝑜𝑛 𝑚𝑜𝑡𝑜𝑟
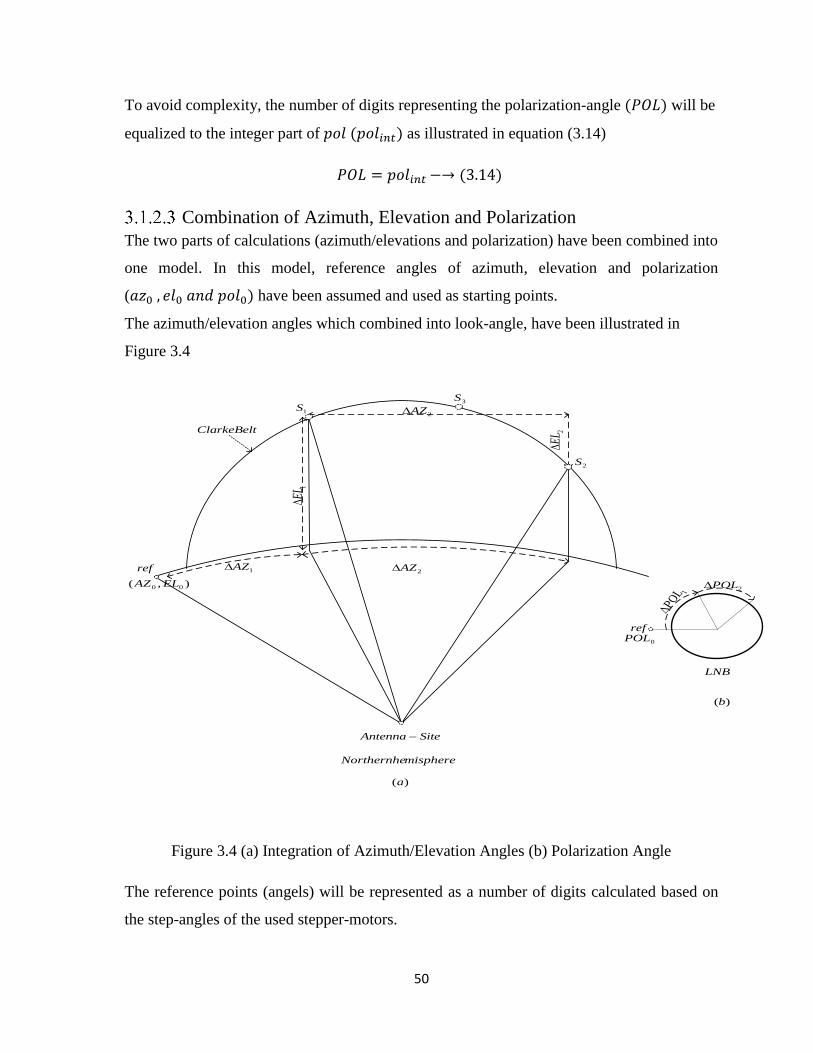
50
To avoid complexity, the number of digits representing the polarization-angle (𝑃𝑂𝐿) will be
equalized to the integer part of 𝑝𝑜𝑙 (𝑝𝑜𝑙𝑖𝑛𝑡) as illustrated in equation (3.14)
𝑃𝑂𝐿 = 𝑝𝑜𝑙𝑖𝑛𝑡 −→ (3.14)
Combination of Azimuth, Elevation and Polarization
The two parts of calculations (azimuth/elevations and polarization) have been combined into
one model. In this model, reference angles of azimuth, elevation and polarization
(𝑎𝑧0 , 𝑒𝑙0 𝑎𝑛𝑑 𝑝𝑜𝑙0) have been assumed and used as starting points.
The azimuth/elevation angles which combined into look-angle, have been illustrated in
Figure 3.4
2AZ1AZ
1EL
2EL
1S
2S
),( 00 ELAZ
ClarkeBelt
SiteAntenna
misphereNorthernhe
1
POL
2POL
LNB
0POL
2AZ
ref
ref
3S
)(a
)(b
Figure 3.4 (a) Integration of Azimuth/Elevation Angles (b) Polarization Angle
The reference points (angels) will be represented as a number of digits calculated based on
the step-angles of the used stepper-motors.

51
𝐴𝑍0 =𝑎𝑧0
𝛽𝑎𝑧⁄ −→ (3.15𝑎)
𝐸𝐿0 =𝑒𝑙0
𝛽𝑒𝑙⁄ −→ (3.15𝑏)
𝑃𝑂𝐿0 =𝑝𝑜𝑙0
𝛽𝑝𝑜𝑙⁄ −→ (3.15𝑐)
Figure 3.4(a), starting from the reference points (𝐴𝑍0 , 𝐸𝐿0𝑎𝑛𝑑 𝑃𝑂𝐿0), to let the dish antenna
point to one of these satellites (assumed S1) which was represented by the digits AZ1, EL1 and
POL1 respectively. The motors must move the difference between azimuth, elevation and
polarization digits of S1 satellite and the reference points. These can be calculated using
equations 3.16a up-to 3.16c.
𝛥𝐴𝑍1 = 𝐴𝑍1 − 𝐴𝑍0−→ (3.16𝑎)
𝛥𝐸𝐿1 = 𝐸𝐿1 − 𝐸𝐿0−→ (3.16𝑏)
𝛥𝑃𝑂𝐿1 = 𝑃𝑂𝐿1 − 𝑃𝑂𝐿0−→ (3.16𝑐)
Also to move the dish-antenna from S1 to S2 that’s illustrated in
Figure 3.4, the motors must move the difference between azimuth, elevation and polarization
digits present S1 and S2. These can be calculated using equations 3.17a up-to 3.17c.
𝛥𝐴𝑍2 = 𝐴𝑍2 − 𝐴𝑍1−→ (3.17𝑎)
𝛥𝐸𝐿2 = 𝐸𝐿2 − 𝐸𝐿1−→ (3.17𝑏)
𝛥𝑃𝑂𝐿2 = 𝑃𝑂𝐿2 − 𝑃𝑂𝐿1−→ (3.17𝑐)
The general form of the above equations for all visible satellites can be formulated as follows:
𝛥𝐴𝑧𝑛 = 𝐴𝑧𝑛 − 𝐴𝑧𝑛−1−→ (3.18𝑎)
𝛥𝐸𝑙𝑛 = 𝐸𝑙𝑛 − 𝐸𝑙𝑛−1−→ (3.18𝑏)
𝛥𝑃𝑜𝑙𝑛 = 𝑃𝑜𝑙𝑛 − 𝑃𝑜𝑙𝑛−1−→ (3.18𝑐)
The negative value of every 𝛥 in the above equations means that the espacific motor
movement is CCW.
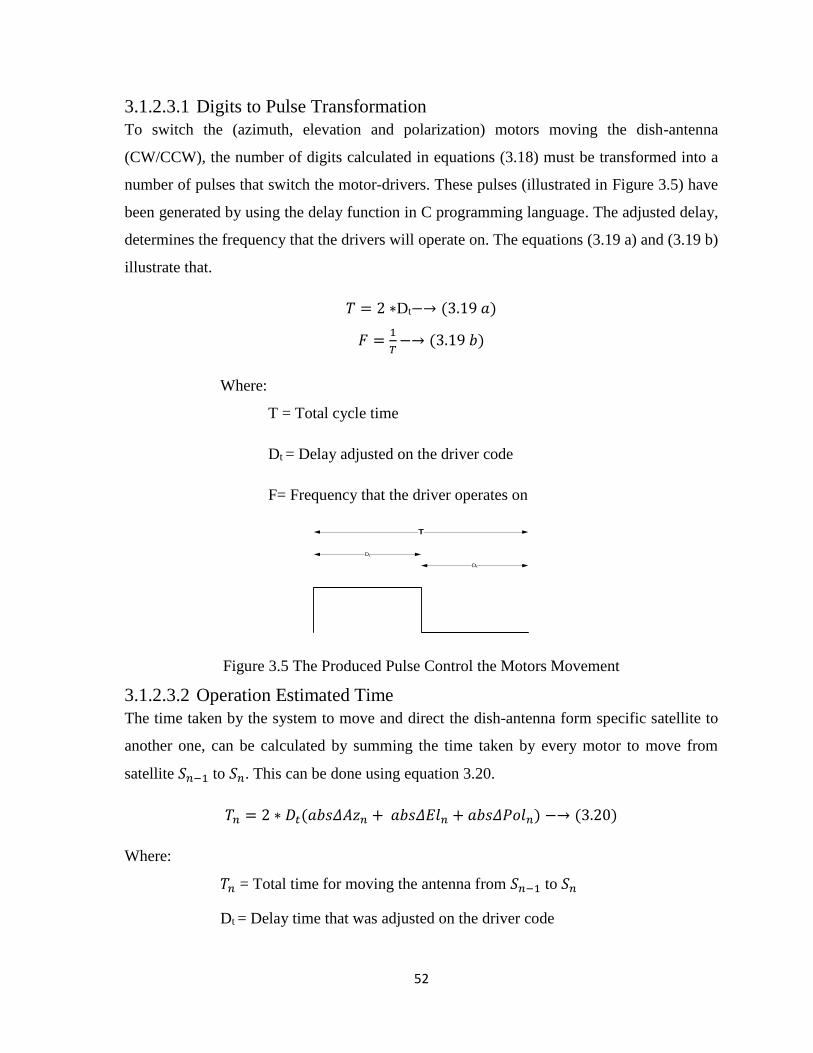
52
3.1.2.3.1 Digits to Pulse Transformation
To switch the (azimuth, elevation and polarization) motors moving the dish-antenna
(CW/CCW), the number of digits calculated in equations (3.18) must be transformed into a
number of pulses that switch the motor-drivers. These pulses (illustrated in Figure 3.5) have
been generated by using the delay function in C programming language. The adjusted delay,
determines the frequency that the drivers will operate on. The equations (3.19 a) and (3.19 b)
illustrate that.
𝑇 = 2 ∗Dt−→ (3.19 𝑎)
𝐹 =1
𝑇−→ (3.19 𝑏)
Where:
T = Total cycle time
Dt = Delay adjusted on the driver code
F= Frequency that the driver operates on
Dt
Dt
T
Figure 3.5 The Produced Pulse Control the Motors Movement
3.1.2.3.2 Operation Estimated Time
The time taken by the system to move and direct the dish-antenna form specific satellite to
another one, can be calculated by summing the time taken by every motor to move from
satellite 𝑆𝑛−1 to 𝑆𝑛. This can be done using equation 3.20.
𝑇𝑛 = 2 ∗ 𝐷𝑡(𝑎𝑏𝑠𝛥𝐴𝑧𝑛 + 𝑎𝑏𝑠𝛥𝐸𝑙𝑛 + 𝑎𝑏𝑠𝛥𝑃𝑜𝑙𝑛) −→ (3.20)
Where:
𝑇𝑛 = Total time for moving the antenna from 𝑆𝑛−1 to 𝑆𝑛
Dt = Delay time that was adjusted on the driver code

53
𝑎𝑏𝑠𝛥𝐴𝑧𝑛= absolute value of the 𝐴𝑧 difference
𝑎𝑏𝑠𝛥𝐸𝑙𝑛= absolute value of the 𝐸𝑙 difference
𝑎𝑏𝑠𝛥𝑃𝑜𝑙𝑛= absolute value of the 𝑃𝑜𝑙 difference
3.1.2.3.3 System Position Precision Calculation
Practically, because of the different error sources, the azimuth/elevation measured angles may
not be equal to the calculated ones. So, the precision of azimuth/elevation readings must be
defined. It will be represented as a gain with mismatching loss which was calculated based on
angles misalignment (difference between the calculated angles and the measure ones).
The azimuth and elevation misalignment angles can be represented as:
∆𝑎𝑧 = 𝑎𝑧𝑐𝑎𝑙 − 𝑎𝑧𝑚 −→ (3.21𝑎)
∆𝑒𝑙 = 𝑒𝑙𝑐𝑎𝑙 − 𝑒𝑙𝑚 −→ (3.21𝑏)
Where:
∆𝑎𝑧 𝑖𝑠 𝑡ℎ𝑒 𝑎𝑧𝑖𝑚𝑢𝑡ℎ 𝑚𝑖𝑠𝑎𝑙𝑖𝑔𝑛𝑚𝑒𝑛𝑡 𝑎𝑛𝑔𝑙𝑒 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
∆𝑒𝑙 𝑖𝑠 𝑡ℎ𝑒 𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 𝑚𝑖𝑠𝑎𝑙𝑖𝑔𝑛𝑚𝑒𝑛𝑡 𝑎𝑛𝑔𝑙𝑒 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
𝑎𝑧𝑐𝑎𝑙 𝑖𝑠 𝑡ℎ𝑒 𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑒𝑑 𝑎𝑧𝑖𝑚𝑢𝑡ℎ 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
𝑒𝑙𝑐𝑎𝑙 𝑖𝑠 𝑡ℎ𝑒 𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑒𝑑 𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
𝑎𝑧𝑚 𝑖𝑠 𝑡ℎ𝑒 𝑚𝑎𝑒𝑠𝑢𝑟𝑒𝑑 𝑎𝑧𝑖𝑚𝑢𝑡ℎ 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
𝑒𝑙𝑚 𝑖𝑠 𝑡ℎ𝑒 𝑚𝑎𝑒𝑠𝑢𝑟𝑒𝑑 𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 𝑖𝑛 𝑑𝑒𝑔𝑟𝑒𝑒𝑠
The absolute value of misalignment angle as a ratio of HPBW can be represented as:
∆𝑎𝑧𝐻𝑃𝐵𝑊 = [(𝑎𝑧𝑐𝑎𝑙 − 𝑎𝑧𝑚)
𝐻𝑃𝐵𝑊𝑎𝑧⁄ ] −→ (3.22𝑎)
∆𝑒𝑙𝐻𝑃𝐵𝑊 = [(𝑒𝑙𝑐𝑎𝑙 − 𝑒𝑙𝑚)
𝐻𝑃𝐵𝑊𝑒𝑙⁄ ] −→ (3.22𝑏)
Where:
∆𝑎𝑧𝐻𝑃𝐵𝑊 𝑖𝑠 𝑡ℎ𝑒 𝑎𝑧𝑖𝑚𝑢𝑡ℎ 𝑚𝑖𝑠𝑎𝑙𝑖𝑔𝑛𝑚𝑒𝑛𝑡 𝑎𝑠 𝑎𝑟𝑡𝑖𝑜 𝑜𝑓 𝐻𝑃𝐵𝑊
∆𝑒𝑙𝐻𝑃𝐵𝑊 𝑖𝑠 𝑡ℎ𝑒 𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 𝑚𝑖𝑠𝑎𝑙𝑖𝑔𝑛𝑚𝑒𝑛𝑡 𝑎𝑠 𝑎𝑟𝑡𝑖𝑜 𝑜𝑓 𝐻𝑃𝐵𝑊

54
The highest gain (0dB) of the antenna can be obtained when the difference between the
calculated angle and the measured one was equal to zero. Also the half power gain (3dB) that
can be received by the antenna can be obtained when absolute value of ∆𝑎𝑧𝐻𝑃𝐵𝑊 and ∆𝑒𝑙𝐻𝑃𝐵𝑊
were equal to 0.5. The above cases can be represented mathematically as follow:
𝐺𝑎𝑧
= 0(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑎𝑧 𝐻𝑃𝐵𝑊𝑎𝑧
⁄ ) = 0
≥ −3(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑎𝑧 𝐻𝑃𝐵𝑊𝑎𝑧⁄ ) ≤ 0.5
< −3(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑎𝑧 𝐻𝑃𝐵𝑊𝑎𝑧⁄ ) > 0.5
−→ (3.23𝑎)
𝐺𝑒𝑙
= 0(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑒𝑙 𝐻𝑃𝐵𝑊𝑒𝑙
⁄ ) = 0
=> −3(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑒𝑙 𝐻𝑃𝐵𝑊𝑒𝑙⁄ ) ≤ 0.5
< −3(𝑑𝐵) 𝑤ℎ𝑒𝑛 𝑎𝑏𝑠 (∆𝑒𝑙 𝐻𝑃𝐵𝑊𝑒𝑙⁄ ) > 0.5
−→ (3.23𝑏)
In general, the more the absolute value of misalignment was increased the gain loss increased
and vice-versa. And the more HPBW increased the gain-loss decreased and vice-versa. This
can be calculated using the equations 3.24a and 3.24b.
𝐺𝑎𝑧 = 10 log [1 − 𝑎𝑏𝑠 (∆𝑎𝑧
𝐻𝑃𝐵𝑊𝑎𝑧⁄ )] [𝑑𝐵] −→ (3.24𝑎)
𝐺𝑒𝑙 = 10 log [1 − 𝑎𝑏𝑠 (∆𝑒𝑙
𝐻𝑃𝐵𝑊𝑒𝑙⁄ )] [𝑑𝐵] −→ (3.24𝑏)
The polarization gain with mismatching loss can be calculated using equation (3.24c).
𝐺𝑝𝑜𝑙 = 20 log[cos(𝛽𝑝𝑜𝑙)] [𝑑𝐵] −→ (3.24𝑐)
The gain average of azimuth, elevation and polarization can be obtained by using the
following equations:
𝐴𝑣𝑔 𝐺𝑎𝑧 =∑𝐺𝑎𝑧
𝑛⁄∞
𝑛=1
[𝑑𝐵]−→ (3.25 𝑎)
𝐴𝑣𝑔 𝐺𝑒𝑙 =∑𝐺𝑒𝑙
𝑛⁄∞
𝑛=1
[𝑑𝐵]−→ (3.25 𝑏)
𝐴𝑣𝑔 𝐺𝑝𝑜𝑙 =∑𝐺𝑝𝑜𝑙
𝑛⁄10
𝑛=1
[𝑑𝐵]−→ (3.25 𝑐)
Where: 𝑛 is number of reading
55
The driven equations in the mathematical part would be the base that the system model and
simulation will be based on.
3.2 Simulation Model
This part of research is concerned with simulating the model input, process and output stages.
To achieve that, a C programming code has been developed. The developed code follows the
sequences followed in manual positioning process controlled by the equations derived in the
mathematical model. In this simulation, the computer key-board was used as an input unit and
also used for confirming the operations. The output and important information were monitored
as numerical results that have been used in the system analyses and evaluation. The developed
simulation code follows the below algorithm and flowchart illustrated in Figure 3.6.
step 01: Start.
step 02: Read the antenna instant direction (azimuth, elevation and polarization) which
was saved as a number of pulses or (digits) based on stepper motors step angles.
step 03: Enter Antenna latitude,longitude and intend satellite longitude (degree).
step 04: Calculate the intend satellite azimuth,elevation and polarization (degree).
step 05: Check if the selected satellite is visible (Yes) , continue step 6,7 and so on. Else
(No), stop the procedures and go to the End.
step 06: Confirm the operation. If the decision is (Yes), follow step 7,8 and so on. Else
(No), stop the procedures and go to the End.
step 07: Change the (azimuth,elevation and polarization) calculated in step-4 from degrees
to number of pulses (digits) based on stepper motors step angles.
step 08: Store the values of the last confirmed antenna (azimuth elevation and
polarization) in the antenna data file (which was calculated in step-7).
step 09: Calculate the differences of (azimuths,elevations and polarizations) in step-2 and
step-7 (differences in pulses).
step 10: Move the dish horizintaly (azimuths pulses difference which was obtained in step-
9) until it points to the intended azimuth which was calculated in step-4.
step 11: Move the dish verticaly (elevations pulses difference which was obtained in step-
9) until it points to the intended elevation which was calculated in step-4.
step 12: Change the antenna skew to the new direction (polarizations pulses difference
which was obtained in step-9).
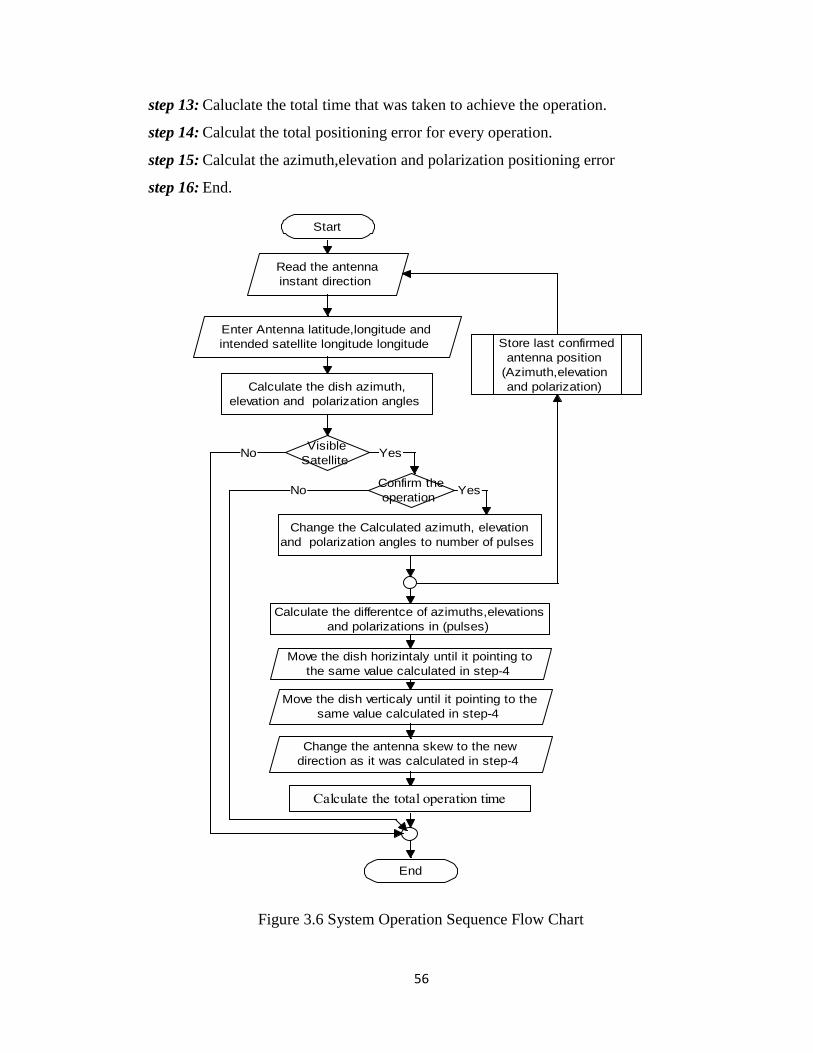
56
Start
End
Enter Antenna latitude,longitude and
intended satellite longitude longitude
Read the antenna
instant direction
Calculate the dish azimuth,
elevation and polarization angles
Visible
Satellite
Confirm the
operation
Change the Calculated azimuth, elevation
and polarization angles to number of pulses
Move the dish horizintaly until it pointing to
the same value calculated in step-4
Move the dish verticaly until it pointing to the
same value calculated in step-4
Change the antenna skew to the new
direction as it was calculated in step-4
Calculate the differentce of azimuths,elevations
and polarizations in (pulses)
Store last confirmed
antenna position
(Azimuth,elevation
and polarization)
NoNo
YesYes
YesYes
NoNo
Calculate the total operation time
Figure 3.6 System Operation Sequence Flow Chart
step 13: Caluclate the total time that was taken to achieve the operation.
step 14: Calculat the total positioning error for every operation.
step 15: Calculat the azimuth,elevation and polarization positioning error
step 16: End.
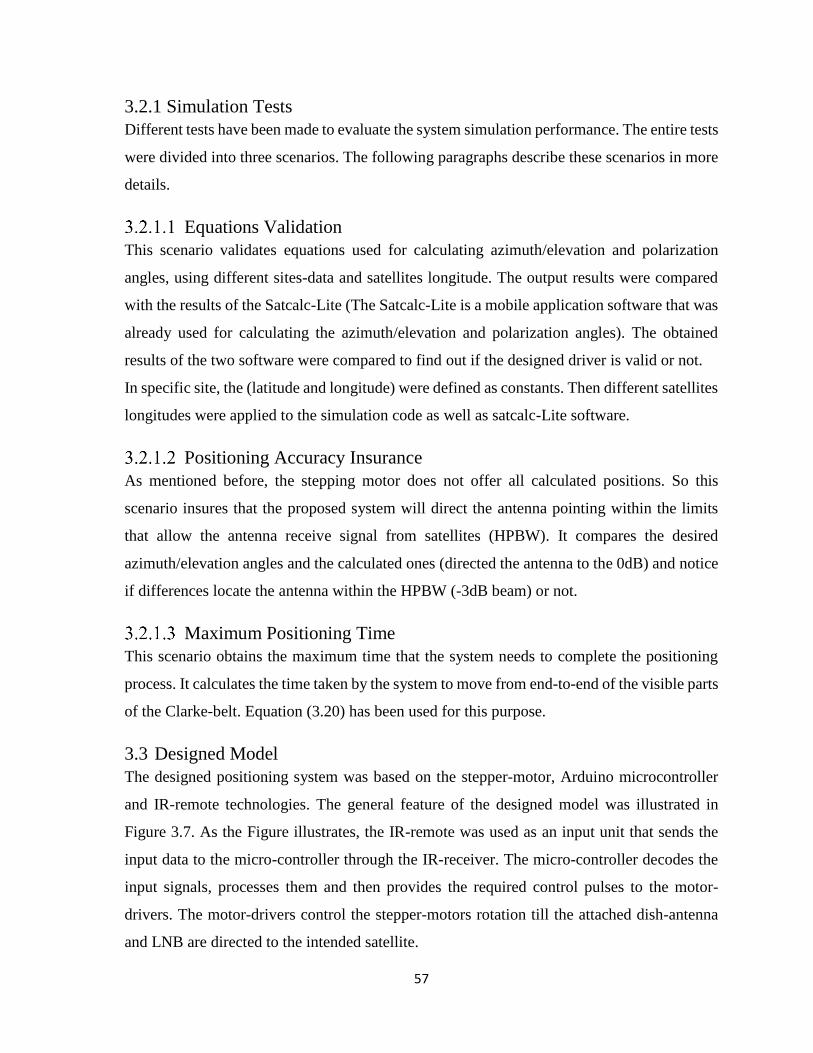
57
3.2.1 Simulation Tests
Different tests have been made to evaluate the system simulation performance. The entire tests
were divided into three scenarios. The following paragraphs describe these scenarios in more
details.
Equations Validation
This scenario validates equations used for calculating azimuth/elevation and polarization
angles, using different sites-data and satellites longitude. The output results were compared
with the results of the Satcalc-Lite (The Satcalc-Lite is a mobile application software that was
already used for calculating the azimuth/elevation and polarization angles). The obtained
results of the two software were compared to find out if the designed driver is valid or not.
In specific site, the (latitude and longitude) were defined as constants. Then different satellites
longitudes were applied to the simulation code as well as satcalc-Lite software.
Positioning Accuracy Insurance
As mentioned before, the stepping motor does not offer all calculated positions. So this
scenario insures that the proposed system will direct the antenna pointing within the limits
that allow the antenna receive signal from satellites (HPBW). It compares the desired
azimuth/elevation angles and the calculated ones (directed the antenna to the 0dB) and notice
if differences locate the antenna within the HPBW (-3dB beam) or not.
Maximum Positioning Time
This scenario obtains the maximum time that the system needs to complete the positioning
process. It calculates the time taken by the system to move from end-to-end of the visible parts
of the Clarke-belt. Equation (3.20) has been used for this purpose.
3.3 Designed Model
The designed positioning system was based on the stepper-motor, Arduino microcontroller
and IR-remote technologies. The general feature of the designed model was illustrated in
Figure 3.7. As the Figure illustrates, the IR-remote was used as an input unit that sends the
input data to the micro-controller through the IR-receiver. The micro-controller decodes the
input signals, processes them and then provides the required control pulses to the motor-
drivers. The motor-drivers control the stepper-motors rotation till the attached dish-antenna
and LNB are directed to the intended satellite.
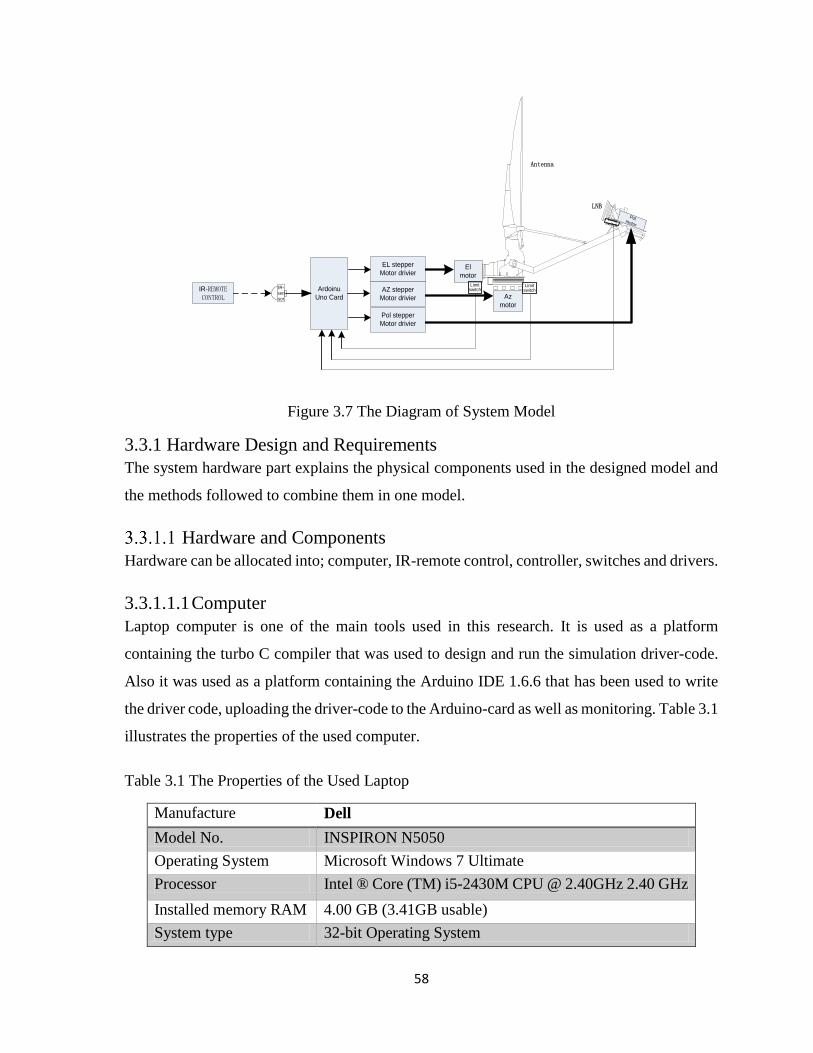
58
Ardoinu
Uno Card
IR-REMOTE CONTROL
El
motor
Antenna
IR-
sen
sor
AZ stepper
Motor drivier
Pol stepper
Motor drivier
EL stepper
Motor drivier
Az
motor
LNB
Polmotor
Limit switch
Limit switch
Limit switch
Figure 3.7 The Diagram of System Model
3.3.1 Hardware Design and Requirements
The system hardware part explains the physical components used in the designed model and
the methods followed to combine them in one model.
Hardware and Components
Hardware can be allocated into; computer, IR-remote control, controller, switches and drivers.
3.3.1.1.1 Computer
Laptop computer is one of the main tools used in this research. It is used as a platform
containing the turbo C compiler that was used to design and run the simulation driver-code.
Also it was used as a platform containing the Arduino IDE 1.6.6 that has been used to write
the driver code, uploading the driver-code to the Arduino-card as well as monitoring. Table 3.1
illustrates the properties of the used computer.
Table 3.1 The Properties of the Used Laptop
Manufacture Dell
Model No. INSPIRON N5050
Operating System Microsoft Windows 7 Ultimate
Processor Intel ® Core (TM) i5-2430M CPU @ 2.40GHz 2.40 GHz
Installed memory RAM 4.00 GB (3.41GB usable)
System type 32-bit Operating System
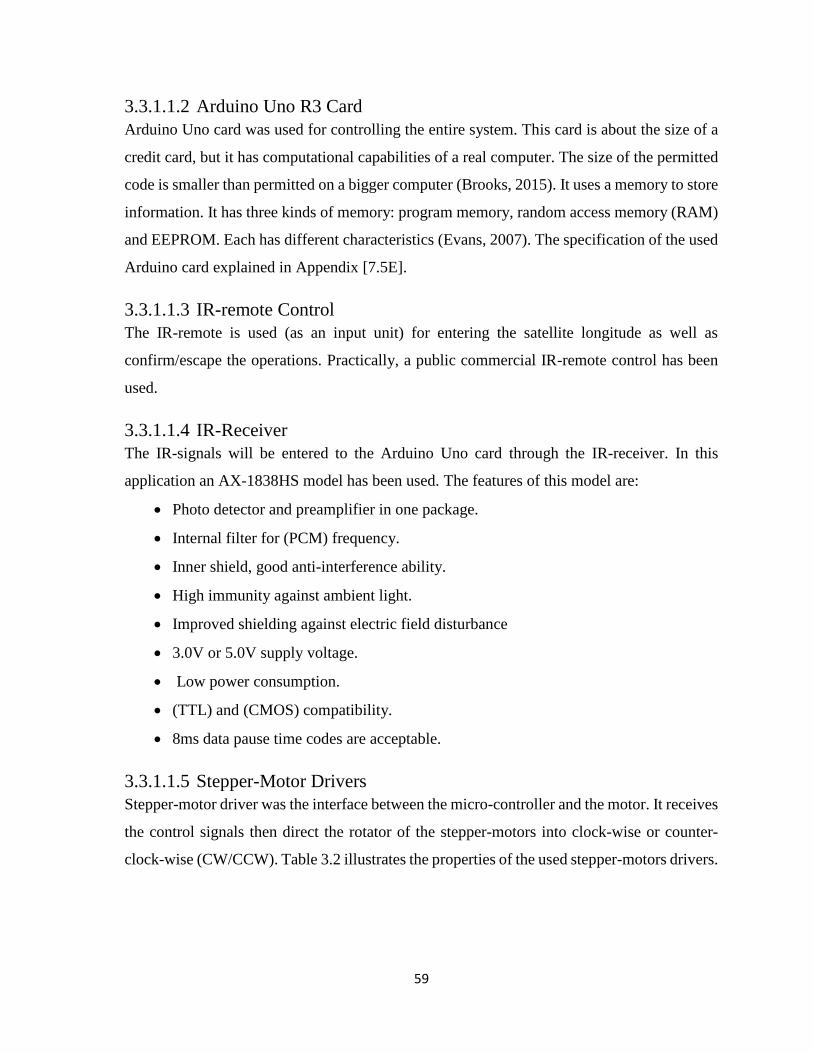
59
3.3.1.1.2 Arduino Uno R3 Card
Arduino Uno card was used for controlling the entire system. This card is about the size of a
credit card, but it has computational capabilities of a real computer. The size of the permitted
code is smaller than permitted on a bigger computer (Brooks, 2015). It uses a memory to store
information. It has three kinds of memory: program memory, random access memory (RAM)
and EEPROM. Each has different characteristics (Evans, 2007). The specification of the used
Arduino card explained in Appendix [7.5E].
3.3.1.1.3 IR-remote Control
The IR-remote is used (as an input unit) for entering the satellite longitude as well as
confirm/escape the operations. Practically, a public commercial IR-remote control has been
used.
3.3.1.1.4 IR-Receiver
The IR-signals will be entered to the Arduino Uno card through the IR-receiver. In this
application an AX-1838HS model has been used. The features of this model are:
Photo detector and preamplifier in one package.
Internal filter for (PCM) frequency.
Inner shield, good anti-interference ability.
High immunity against ambient light.
Improved shielding against electric field disturbance
3.0V or 5.0V supply voltage.
Low power consumption.
(TTL) and (CMOS) compatibility.
8ms data pause time codes are acceptable.
3.3.1.1.5 Stepper-Motor Drivers
Stepper-motor driver was the interface between the micro-controller and the motor. It receives
the control signals then direct the rotator of the stepper-motors into clock-wise or counter-
clock-wise (CW/CCW). Table 3.2 illustrates the properties of the used stepper-motors drivers.
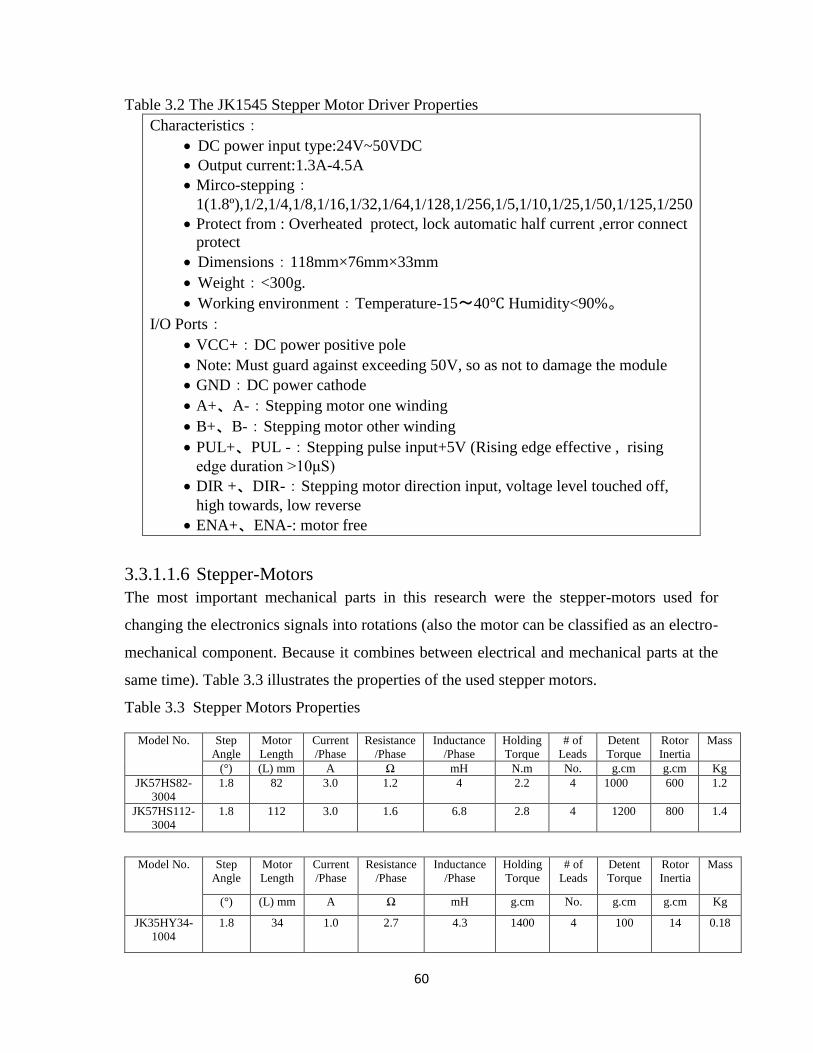
60
Table 3.2 The JK1545 Stepper Motor Driver Properties
Characteristics:
DC power input type:24V~50VDC
Output current:1.3A-4.5A
Mirco-stepping:1(1.8º),1/2,1/4,1/8,1/16,1/32,1/64,1/128,1/256,1/5,1/10,1/25,1/50,1/125,1/250
Protect from : Overheated protect, lock automatic half current ,error connect
protect
Dimensions:118mm×76mm×33mm
Weight:<300g.
Working environment:Temperature-15~40 Humidity<90%。
I/O Ports:
VCC+:DC power positive pole
Note: Must guard against exceeding 50V, so as not to damage the module
GND:DC power cathode
A+、A-:Stepping motor one winding
B+、B-:Stepping motor other winding
PUL+、PUL -:Stepping pulse input+5V (Rising edge effective , rising
edge duration >10μS)
DIR +、DIR-:Stepping motor direction input, voltage level touched off,
high towards, low reverse
ENA+、ENA-: motor free
3.3.1.1.6 Stepper-Motors
The most important mechanical parts in this research were the stepper-motors used for
changing the electronics signals into rotations (also the motor can be classified as an electro-
mechanical component. Because it combines between electrical and mechanical parts at the
same time). Table 3.3 illustrates the properties of the used stepper motors.
Table 3.3 Stepper Motors Properties
Model No. Step
Angle
Motor
Length
Current
/Phase
Resistance
/Phase
Inductance
/Phase
Holding
Torque
# of
Leads
Detent
Torque
Rotor
Inertia
Mass
(°) (L) mm A Ω mH N.m No. g.cm g.cm Kg
JK57HS82-
3004
1.8 82 3.0 1.2 4 2.2 4 1000 600 1.2
JK57HS112-
3004
1.8 112 3.0 1.6 6.8 2.8 4 1200 800 1.4
Model No. Step
Angle
Motor
Length
Current
/Phase
Resistance
/Phase
Inductance
/Phase
Holding
Torque
# of
Leads
Detent
Torque
Rotor
Inertia
Mass
(°) (L) mm A Ω mH g.cm No. g.cm g.cm Kg
JK35HY34-
1004
1.8 34 1.0 2.7 4.3 1400 4 100 14 0.18
61
3.3.1.1.7 Limit Switches
Limit switches have been used to determine the reference points. By pressing every one of
these switches, a logic signal has been sent to the controller changing the status and indicating
that the motor had reached the reference point (explained in more details later).
Entire System Wiring
This part describes the method that was followed to connect the system hardware (stepper
motors, motor-drivers, limit switches, IR-receiver, micro-controller and PC) with each other.
Figure 3.8 illustrates the digital I/O pins used to connect the motor-drivers and the limit
switches to the Arduino card. Pin-2 up to pin-7 configured as output pins to send control signal
to the motor-drivers and pin-8 up-to pin-10 configured as an input to receive signals from the
limit-switches. Each one of the motor-drivers was connected to the Arduino card by using
three wires. One, for deliver pulses that move the specific stepper-motor (CW). The second,
for deliver pulses that move the motor (CCW) and the third one for grounding. Practically,
pin-2 and pin-3 were specified for controlling azimuths motor, pin-4 and pin-5 for controlling
elevations one and pin-6 and pin-7 for controlling polarizations one.
The IR-receiver is the input port that receives the intended satellite longitude as well as the
confirmation command and other control commands.
The USB connection was used to upload the designed system-driver to the Arduino card. Also
it is used to monitor the entered satellite longitude, the calculated azimuth, elevation and
polarization angles and other information.
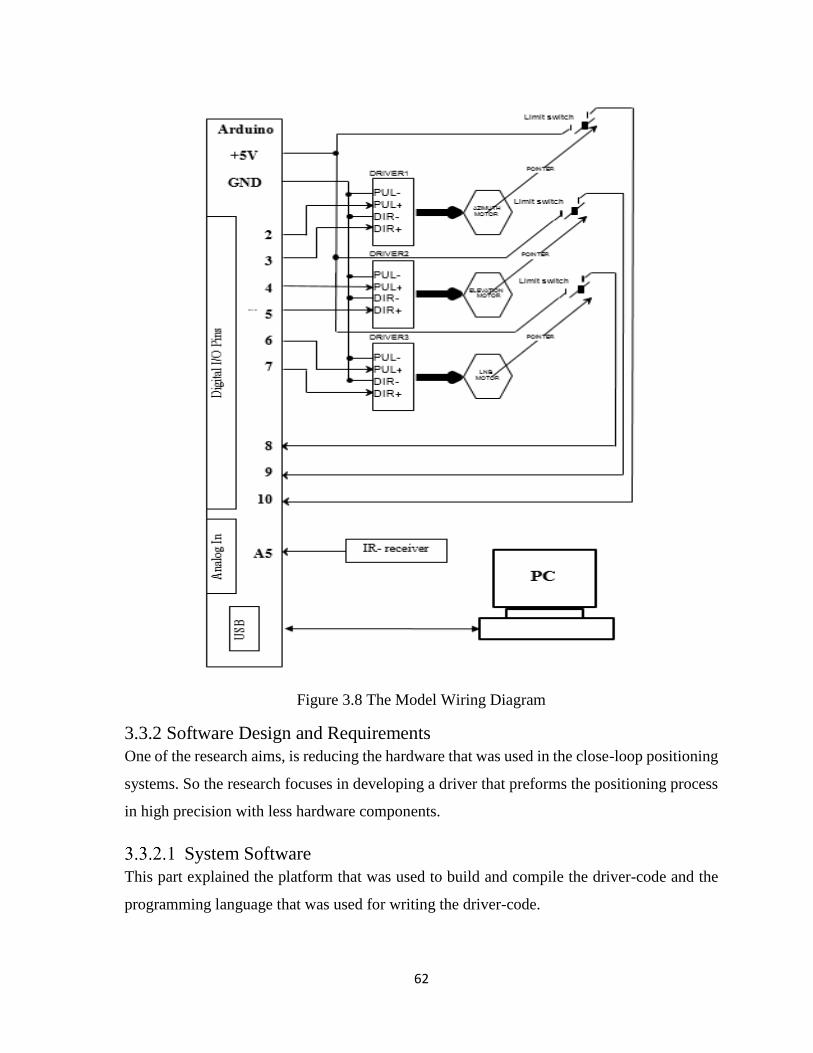
62
Figure 3.8 The Model Wiring Diagram
3.3.2 Software Design and Requirements
One of the research aims, is reducing the hardware that was used in the close-loop positioning
systems. So the research focuses in developing a driver that preforms the positioning process
in high precision with less hardware components.
System Software
This part explained the platform that was used to build and compile the driver-code and the
programming language that was used for writing the driver-code.
63
3.3.2.1.1 Arduino tools
Arduino provided an integrated development environment (IDE) free download from Arduino
website. In this research an Arduino IDE 1.6.6 version was used to develop, compile and
upload the control driver-code to the micro-controller.
3.3.2.1.2 Arduino C
The programming language that was used to write the driver-code was a robust subset of
standard C. This subset of standard C was called Arduino C (Purdum, 2012). Its syntax and
structure are similar to other programming language. So every programmer using any
programming language with experience should have no difficulty in programming the
Arduino, although some hardware-specific language components may be unfamiliar (Brooks,
2015). The major difference between micro controller programming and “conventional”
programming (e.g. uses for scientific and engineering computation) was that the essential
purpose of micro controller programming is to control hardware (Brooks, 2015).
System-Driver Modelling
This part discussed the method that was followed to design the system-driver using Arduino
C language. Every Arduino C code (which is called sketch) consists of setup and loop
functions even if the setup or loop doesn’t do anything. The setup function is executed once
when the Arduino card is turned on, or when the reset-button was pressed (Purdum, 2012).
In this research, the IR-remote control was used to enter the satellite longitude. Also it was
used to control the model with different commands. For different uses of the IR-remote control
and avoiding the complexity, the driver code was written as a multifunction code. Every one
of these functions was called base on demand. This part of the research explained the
algorithms of every function as well as when it was called to serve a specific job.
3.3.2.2.1 Setup function
The setup function is the function that was used to configure the output ports that will be used
to deliver the control signal to the stepper-motor drivers and the input ports that will be used
to receive signals from the IR-remote and limit switches, appendix [A].
64
3.3.2.2.2 Loop function
The loop function was the function that contains the repeatedly run commands. It was used as
the main function in the conventional C code. The other functions have been called from inside
this function based on demand. The Algorithm of this function was explained as follows.
Algorithm:
step 01: Start.
step 02: Receive IR-remote encoded signal.
step 03: Send the received signal to IR-remote Control Decoder function so as to be
decoded.
step 04: If Reset-Sat button was pressed, switch to Reset Satellite function.
step 05: Else, check if the OK button was pressed, switch to Operation Confirm and
Counter Reset functions. Then go to step (8).
step 06: Else check if Exit button was pressed, switch to Counter Reset function. Then
go to step (8).
step 07: Else switch to Satellite Longitude Digits function. Then go to step (8).
step 08: Resume receiving IR-remote input.
step 09: End.
3.3.2.2.3 IR-remote Control Decoder function
The IR-remote was used to input the sub-satellite point (satellite longitude) to the designed
system. This function was used to decode the encoded hexadecimal-numbers which represent
every one of the IR-remote control keys. A special sketch has been used and upload to the
Arduino card to display the encoded hexadecimal number of every one of the IR-remote keys
appendix [7.2B]. The IR-remote number-keys and some of the keys have been used for
execute and confirm commands as mentioned. The remaining keys were decoded to reject or
escape the operation when pressed. This function has been written as a switch statement. It
was formulated as represented in the appendix [7.3C].
3.3.2.2.4 Satellite Longitude Digits Function:
This function was used for entering the IR-decoded numbers used to build the satellite
longitude arranged from 0-360. So the satellite longitude may contains 1 up to 3 digits. The
Arduino Uno starts processing the IR-remote encoded signal as soon as it was received. This
65
function was developed to let the Arduino start the processing after entering the entire digits
of satellite longitude. The function algorithm can be explained as follows:
step 01: Start.
step 02: Press one of the number-keys of the IR-remote (0-9).
step 03: If the number-key pressed value is equal to the longitude of the satellite (for
example 7) then go to step (10). If-else go to the step (4). Else go to step (12).
step 04: Press one of the number-keys for the second time to build the number equal to
the satellite longitude.
step 05: Multiply the first entered number by 10. Then add the second one to the result.
step 06: If the result of the calculations in step (5) is equal to the longitude of the satellite
(for example 23) then go to step (10). If-else go to the next step. Else go to step
(12).
step 07: Press one of the number-keys for the third time to build the number equal to the
satellite longitude.
step 08: Multiply the result of the calculations in step (5) by 10. Then add the third
entered number to the result.
step 09: If the result of the calculations in step (8) is equal to the longitude of the satellite
(for example 334) then go to the next step. Else go to step (12).
step 10: Call Operation Confirm Function to start calculating the azimuth, elevation
and polarization angles.
step 11: If the result of the calculations in step (8) is greater than 360, the system will
escape and back to the starting point.
step 12: Escape the operation.
step 13: End.
Note:
If you press one more digit, the system will erase the entire digits and back to the start
point.
3.3.2.2.5 Operation Confirm Function
This function was called by Loop-function when the operation was confirmed. Also it was
called by Satellite Longitude Digits function. It was used to read the decoded number that
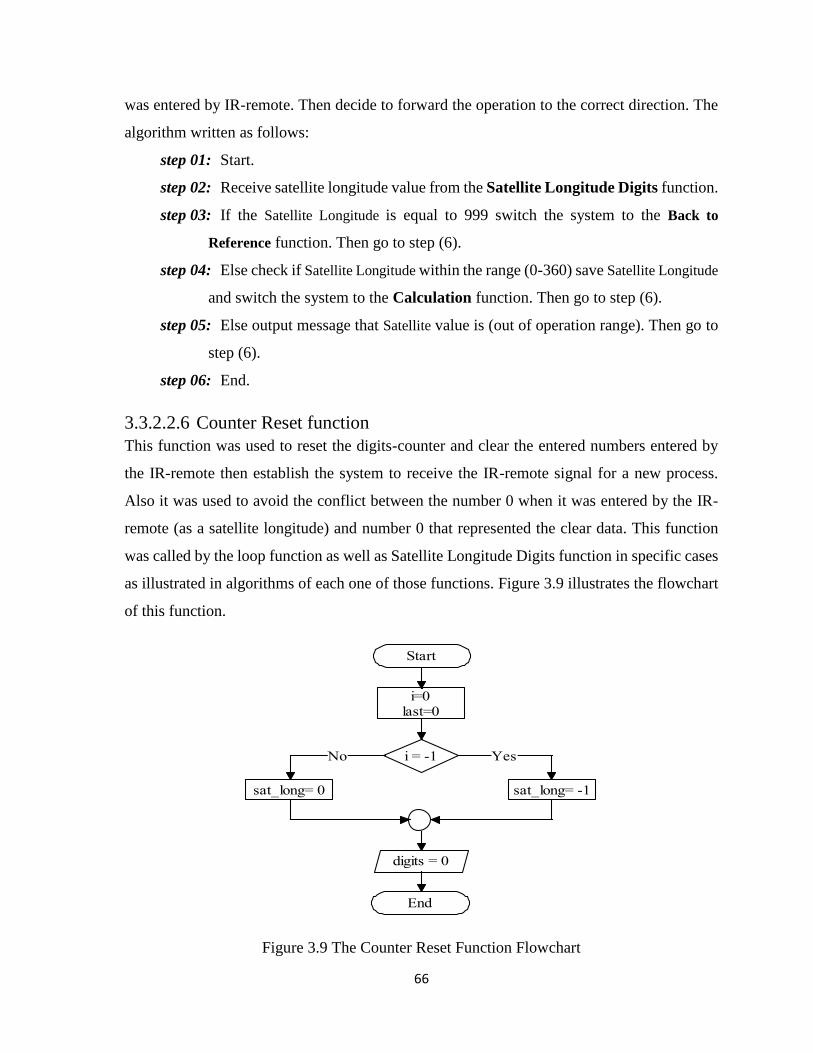
66
was entered by IR-remote. Then decide to forward the operation to the correct direction. The
algorithm written as follows:
step 01: Start.
step 02: Receive satellite longitude value from the Satellite Longitude Digits function.
step 03: If the Satellite Longitude is equal to 999 switch the system to the Back to
Reference function. Then go to step (6).
step 04: Else check if Satellite Longitude within the range (0-360) save Satellite Longitude
and switch the system to the Calculation function. Then go to step (6).
step 05: Else output message that Satellite value is (out of operation range). Then go to
step (6).
step 06: End.
3.3.2.2.6 Counter Reset function
This function was used to reset the digits-counter and clear the entered numbers entered by
the IR-remote then establish the system to receive the IR-remote signal for a new process.
Also it was used to avoid the conflict between the number 0 when it was entered by the IR-
remote (as a satellite longitude) and number 0 that represented the clear data. This function
was called by the loop function as well as Satellite Longitude Digits function in specific cases
as illustrated in algorithms of each one of those functions. Figure 3.9 illustrates the flowchart
of this function.
Figure 3.9 The Counter Reset Function Flowchart
Start
i=0last=0
i = -1
sat_long= -1sat_long= 0
YesYesNoNo
digits = 0
End
67
3.3.2.2.7 Calculations Function
This function contents the equations used to calculate the azimuth/elevation and polarization
angles in degrees then changes it into a number of pulses. Also it generates the pulses and
switches them to the motor-drivers moving the motors and directing the antenna to the
intended satellite.
Practically, the used stepper- motors driver does not response for all operation cases as
expected. Instead of that optimization Algorithm was developed to solve this problem. The
developed optimization algorithm was imbedded in this calculations function appendix [D].
The Calculations function was formulated as the following algorithm and flowchart illustrated
in Figure 3.10.
step 01: Start.
step 02: Receive satellite longitude.
step 03: Read the site latitude, longitude.
step 04: Calculate the azimuth, elevation and polarization angles.
step 05: If the calculated elevation angle is less than 0 (print the selected satellite is
invisible), then go to step 13.
step 06: Else, convert the azimuth, elevation and polarization angles to a number of
pulses.
step 07: Read the last saved antenna azimuth, elevation and polarization number of
pulses.
step 08: Calculate the difference between the azimuths, elevations and polarizations
number of pulses obtained in steps 6 and 7.
step 09: Read the last motors movement directions saved on Arduino RAM.
step 10: Apply the algorithm of optimizing stepper-motor drivers operation appendix
[D].
step 11: Save the last motors movement directions based on calculations in step 8.
step 12: Send the calculated numbers to the specific driver to rotate the motor so as to
direct the antenna to the correct direction.
step 13: End.
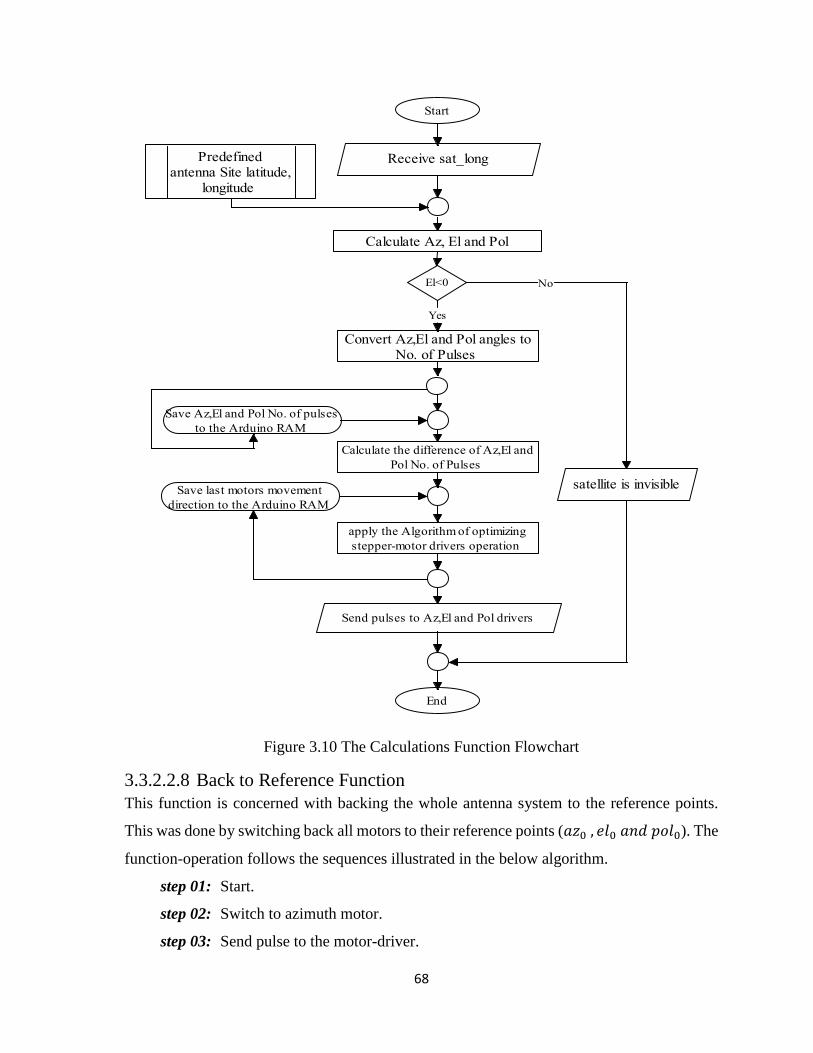
68
Figure 3.10 The Calculations Function Flowchart
3.3.2.2.8 Back to Reference Function
This function is concerned with backing the whole antenna system to the reference points.
This was done by switching back all motors to their reference points (𝑎𝑧0 , 𝑒𝑙0 𝑎𝑛𝑑 𝑝𝑜𝑙0). The
function-operation follows the sequences illustrated in the below algorithm.
step 01: Start.
step 02: Switch to azimuth motor.
step 03: Send pulse to the motor-driver.
End
Predefinedantenna Site latitude,
longitude
Start
Save Az,El and Pol No. of pulses
to the Arduino RAM
Receive sat_long
Calculate Az, El and Pol
El<0 NoNo
Convert Az,El and Pol angles to No. of Pulses
YesYes
Send pulses to Az,El and Pol drivers
Calculate the difference of Az,El and
Pol No. of Pulses
Save last motors movement
direction to the Arduino RAM
apply the Algorithm of optimizing
stepper-motor drivers operation
satellite is invisible
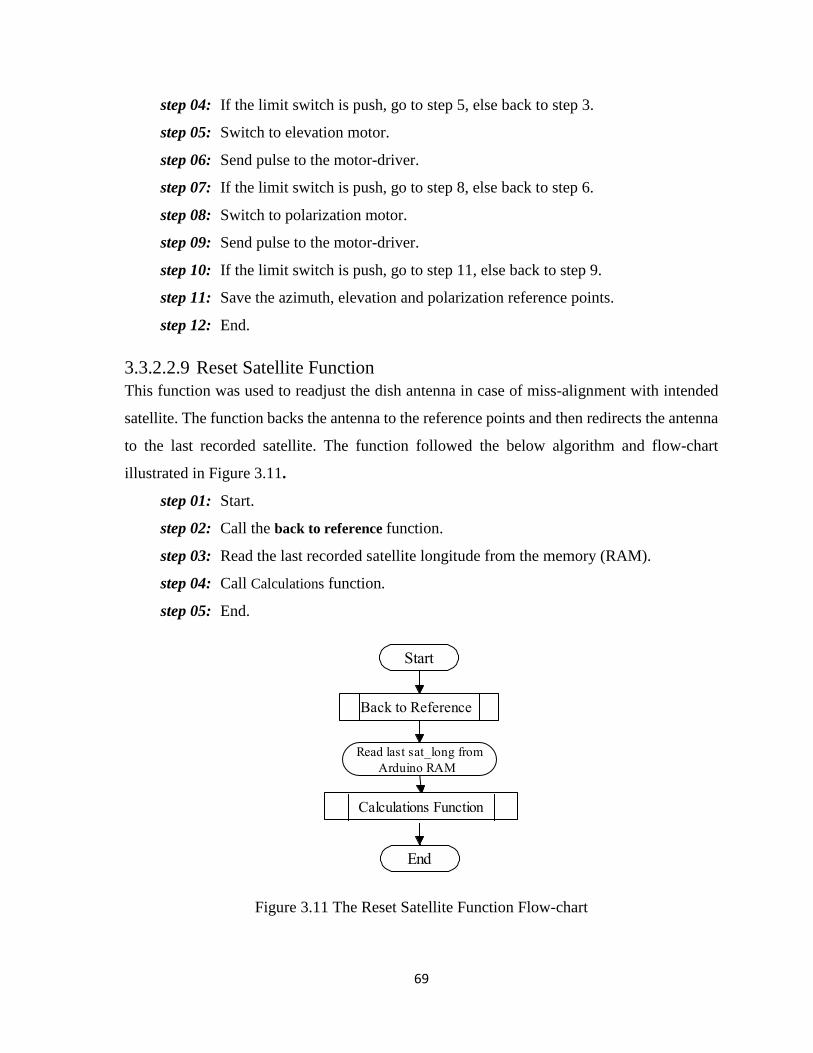
69
step 04: If the limit switch is push, go to step 5, else back to step 3.
step 05: Switch to elevation motor.
step 06: Send pulse to the motor-driver.
step 07: If the limit switch is push, go to step 8, else back to step 6.
step 08: Switch to polarization motor.
step 09: Send pulse to the motor-driver.
step 10: If the limit switch is push, go to step 11, else back to step 9.
step 11: Save the azimuth, elevation and polarization reference points.
step 12: End.
3.3.2.2.9 Reset Satellite Function
This function was used to readjust the dish antenna in case of miss-alignment with intended
satellite. The function backs the antenna to the reference points and then redirects the antenna
to the last recorded satellite. The function followed the below algorithm and flow-chart
illustrated in Figure 3.11.
step 01: Start.
step 02: Call the back to reference function.
step 03: Read the last recorded satellite longitude from the memory (RAM).
step 04: Call Calculations function.
step 05: End.
Figure 3.11 The Reset Satellite Function Flow-chart
Start
End
Read last sat_long from
Arduino RAM
Calculations Function
Back to Reference
70
3.4 Experimental Test
This section explains the methods followed to conduct the research. After completing the
hardware and software design, a number of tests have been done to insure that the designed
system can be implemented in real world.
3.4.1 Unit Testing
It is so complicated to insure that the system components operate in an accurate way if the
system has been tested as one unit. Instead of that, the test was done for every one of stepper-
motors separately.
A protractor has been attached to every one of the motors. Also pointers were fixed to the
rotators of the motors. Different satellites longitudes were applied to the designed-software.
The software calculated azimuth, elevation and polarization angles and displayed them on the
PC screen. Then the controller sent control signals rotating the attached pointers and stopping
them upright angles reading on the protractors. The displayed angles readings were located on
tables in contrast with the observed ones which the pointers stopped upright over them on
protractors. Based on these readings the system positioning precision was calculated.
3.4.2 Model Integration
Small model was integrated to illustrate how can the designed system position the antenna
and switch between a number of satellites. The azimuth/elevation motors and the dish-antenna
were combined in one unit.
3.5 System Validation
This part determined if the designed system was effective or not, insuring that the designed
system answers and solves the problems mentioned in problem statement part in chapter one.
It was divided into two sections. The first section obtained the system positioning accuracy.
In this section the measured angles achieved in the unit testing part were compared with the
angles calculated by (http://satsig.net/) and (http://satlex.de/) web sides. The system accuracy
was calculated based on the averages of the differences between the measured and calculated
angles. The second section highlights a number of properties of the designed system and
compares them with that mentioned in the related studies.
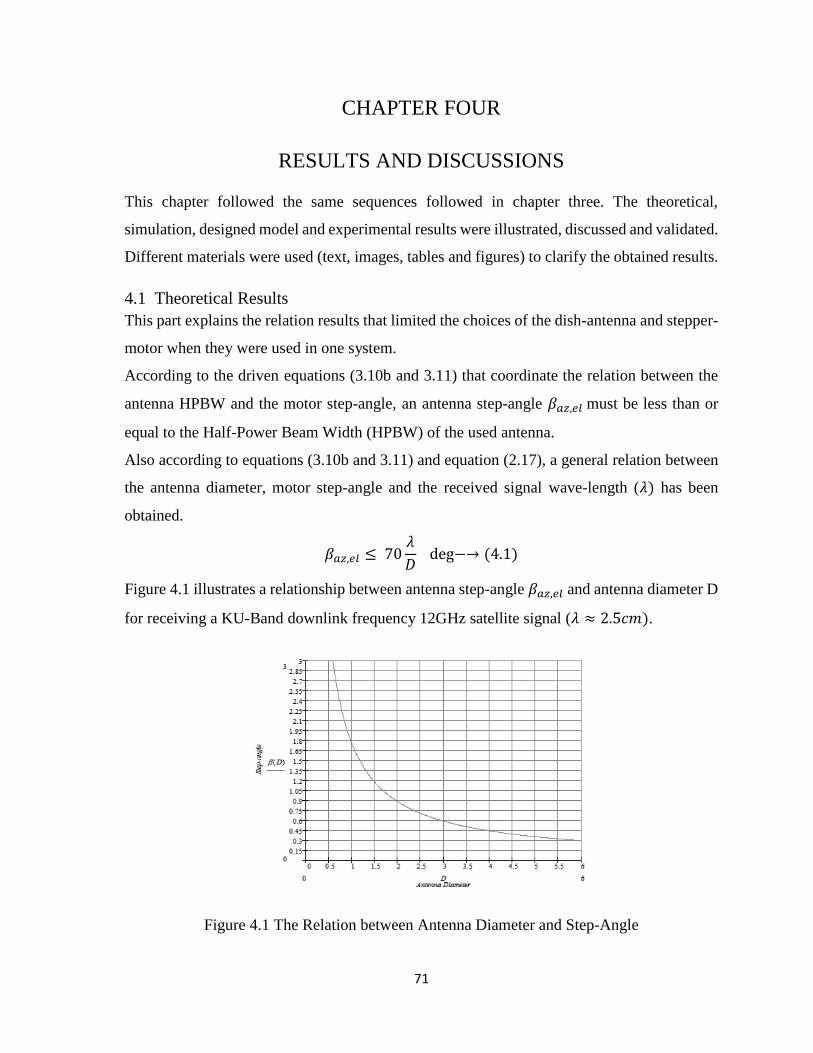
71
CHAPTER FOUR
4 RESULTS AND DISCUSSIONS
This chapter followed the same sequences followed in chapter three. The theoretical,
simulation, designed model and experimental results were illustrated, discussed and validated.
Different materials were used (text, images, tables and figures) to clarify the obtained results.
4.1 Theoretical Results
This part explains the relation results that limited the choices of the dish-antenna and stepper-
motor when they were used in one system.
According to the driven equations (3.10b and 3.11) that coordinate the relation between the
antenna HPBW and the motor step-angle, an antenna step-angle 𝛽𝑎𝑧,𝑒𝑙 must be less than or
equal to the Half-Power Beam Width (HPBW) of the used antenna.
Also according to equations (3.10b and 3.11) and equation (2.17), a general relation between
the antenna diameter, motor step-angle and the received signal wave-length (𝜆) has been
obtained.
𝛽𝑎𝑧,𝑒𝑙 ≤ 70𝜆
𝐷 deg−→ (4.1)
Figure 4.1 illustrates a relationship between antenna step-angle 𝛽𝑎𝑧,𝑒𝑙 and antenna diameter D
for receiving a KU-Band downlink frequency 12GHz satellite signal (𝜆 ≈ 2.5𝑐𝑚).
Figure 4.1 The Relation between Antenna Diameter and Step-Angle
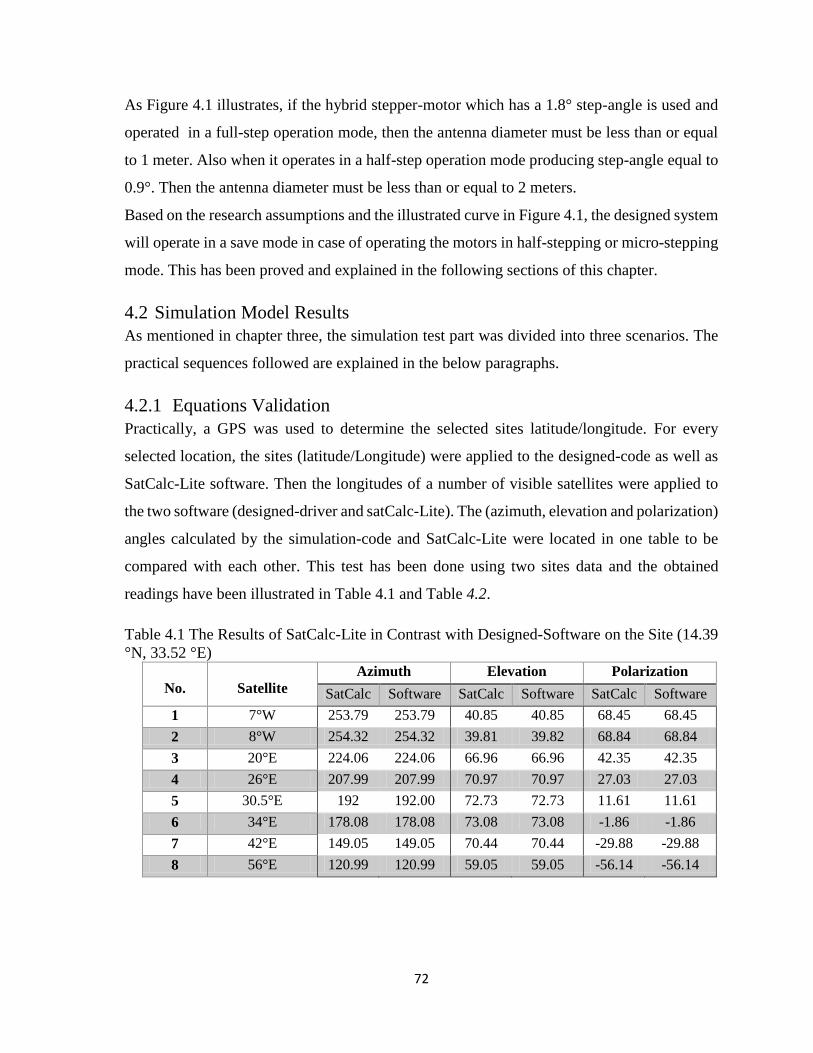
72
As Figure 4.1 illustrates, if the hybrid stepper-motor which has a 1.8° step-angle is used and
operated in a full-step operation mode, then the antenna diameter must be less than or equal
to 1 meter. Also when it operates in a half-step operation mode producing step-angle equal to
0.9°. Then the antenna diameter must be less than or equal to 2 meters.
Based on the research assumptions and the illustrated curve in Figure 4.1, the designed system
will operate in a save mode in case of operating the motors in half-stepping or micro-stepping
mode. This has been proved and explained in the following sections of this chapter.
4.2 Simulation Model Results
As mentioned in chapter three, the simulation test part was divided into three scenarios. The
practical sequences followed are explained in the below paragraphs.
4.2.1 Equations Validation
Practically, a GPS was used to determine the selected sites latitude/longitude. For every
selected location, the sites (latitude/Longitude) were applied to the designed-code as well as
SatCalc-Lite software. Then the longitudes of a number of visible satellites were applied to
the two software (designed-driver and satCalc-Lite). The (azimuth, elevation and polarization)
angles calculated by the simulation-code and SatCalc-Lite were located in one table to be
compared with each other. This test has been done using two sites data and the obtained
readings have been illustrated in Table 4.1 and Table 4.2.
Table 4.1 The Results of SatCalc-Lite in Contrast with Designed-Software on the Site (14.39
°N, 33.52 °E)
No.
Satellite
Azimuth Elevation Polarization
SatCalc Software SatCalc Software SatCalc Software
1 7°W 253.79 253.79 40.85 40.85 68.45 68.45
2 8°W 254.32 254.32 39.81 39.82 68.84 68.84
3 20°E 224.06 224.06 66.96 66.96 42.35 42.35
4 26°E 207.99 207.99 70.97 70.97 27.03 27.03
5 30.5°E 192 192.00 72.73 72.73 11.61 11.61
6 34°E 178.08 178.08 73.08 73.08 -1.86 -1.86
7 42°E 149.05 149.05 70.44 70.44 -29.88 -29.88
8 56°E 120.99 120.99 59.05 59.05 -56.14 -56.14
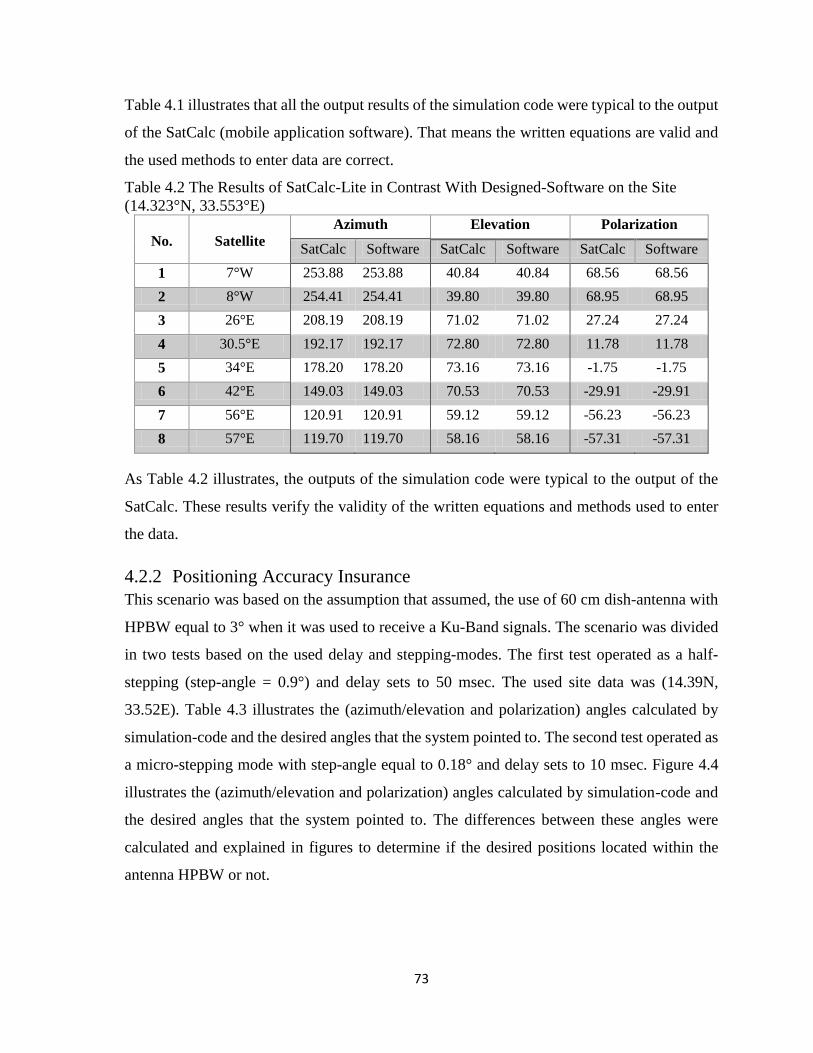
73
Table 4.1 illustrates that all the output results of the simulation code were typical to the output
of the SatCalc (mobile application software). That means the written equations are valid and
the used methods to enter data are correct.
Table 4.2 The Results of SatCalc-Lite in Contrast With Designed-Software on the Site
(14.323°N, 33.553°E)
No.
Satellite
Azimuth Elevation Polarization
SatCalc Software SatCalc Software SatCalc Software
1 7°W 253.88 253.88 40.84 40.84 68.56 68.56
2 8°W 254.41 254.41 39.80 39.80 68.95 68.95
3 26°E 208.19 208.19 71.02 71.02 27.24 27.24
4 30.5°E 192.17 192.17 72.80 72.80 11.78 11.78
5 34°E 178.20 178.20 73.16 73.16 -1.75 -1.75
6 42°E 149.03 149.03 70.53 70.53 -29.91 -29.91
7 56°E 120.91 120.91 59.12 59.12 -56.23 -56.23
8 57°E 119.70 119.70 58.16 58.16 -57.31 -57.31
As Table 4.2 illustrates, the outputs of the simulation code were typical to the output of the
SatCalc. These results verify the validity of the written equations and methods used to enter
the data.
4.2.2 Positioning Accuracy Insurance
This scenario was based on the assumption that assumed, the use of 60 cm dish-antenna with
HPBW equal to 3° when it was used to receive a Ku-Band signals. The scenario was divided
in two tests based on the used delay and stepping-modes. The first test operated as a half-
stepping (step-angle = 0.9°) and delay sets to 50 msec. The used site data was (14.39N,
33.52E). Table 4.3 illustrates the (azimuth/elevation and polarization) angles calculated by
simulation-code and the desired angles that the system pointed to. The second test operated as
a micro-stepping mode with step-angle equal to 0.18° and delay sets to 10 msec. Figure 4.4
illustrates the (azimuth/elevation and polarization) angles calculated by simulation-code and
the desired angles that the system pointed to. The differences between these angles were
calculated and explained in figures to determine if the desired positions located within the
antenna HPBW or not.
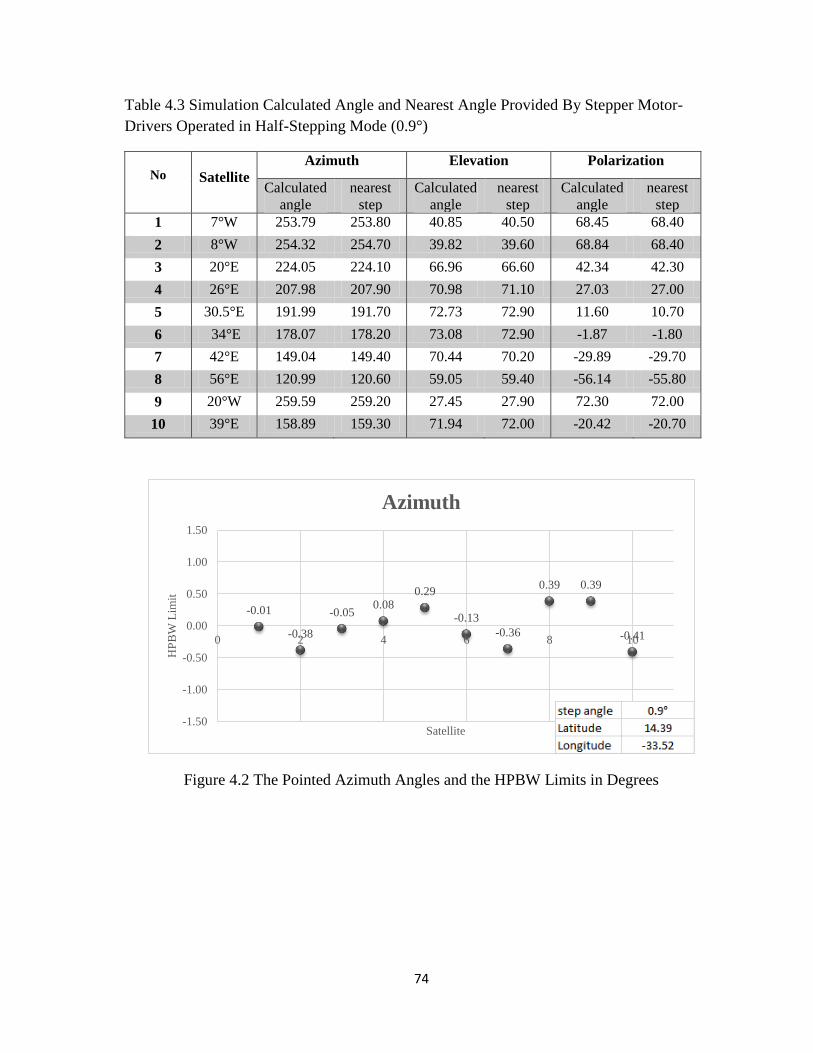
74
Table 4.3 Simulation Calculated Angle and Nearest Angle Provided By Stepper Motor-
Drivers Operated in Half-Stepping Mode (0.9°)
No
Satellite
Azimuth Elevation Polarization
Calculated
angle
nearest
step
Calculated
angle
nearest
step
Calculated
angle
nearest
step
1 7°W 253.79 253.80 40.85 40.50 68.45 68.40
2 8°W 254.32 254.70 39.82 39.60 68.84 68.40
3 20°E 224.05 224.10 66.96 66.60 42.34 42.30
4 26°E 207.98 207.90 70.98 71.10 27.03 27.00
5 30.5°E 191.99 191.70 72.73 72.90 11.60 10.70
6 34°E 178.07 178.20 73.08 72.90 -1.87 -1.80
7 42°E 149.04 149.40 70.44 70.20 -29.89 -29.70
8 56°E 120.99 120.60 59.05 59.40 -56.14 -55.80
9 20°W 259.59 259.20 27.45 27.90 72.30 72.00
10 39°E 158.89 159.30 71.94 72.00 -20.42 -20.70
Figure 4.2 The Pointed Azimuth Angles and the HPBW Limits in Degrees
-0.01
-0.38
-0.050.08
0.29
-0.13
-0.36
0.39 0.39
-0.41
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0 2 4 6 8 10
HP
BW
Lim
it
Satellite
Azimuth
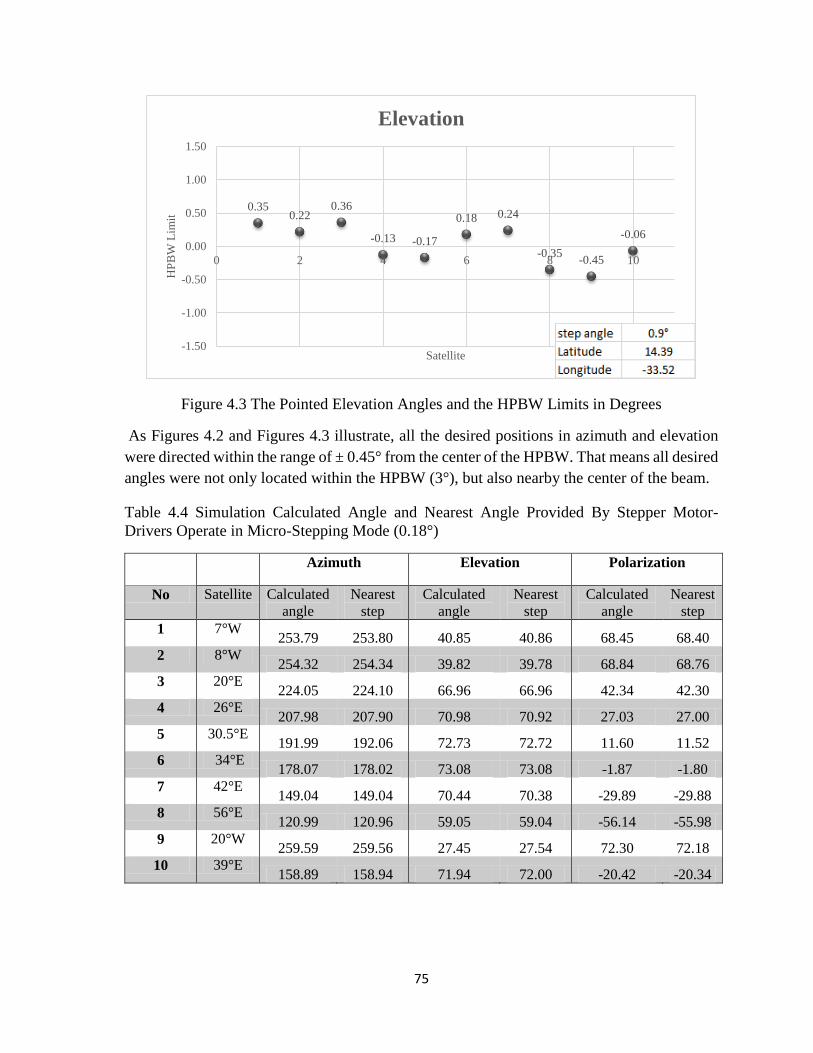
75
Figure 4.3 The Pointed Elevation Angles and the HPBW Limits in Degrees
As Figures 4.2 and Figures 4.3 illustrate, all the desired positions in azimuth and elevation
were directed within the range of ± 0.45° from the center of the HPBW. That means all desired
angles were not only located within the HPBW (3°), but also nearby the center of the beam.
Table 4.4 Simulation Calculated Angle and Nearest Angle Provided By Stepper Motor-
Drivers Operate in Micro-Stepping Mode (0.18°)
Azimuth Elevation Polarization
No Satellite Calculated
angle
Nearest
step
Calculated
angle
Nearest
step
Calculated
angle
Nearest
step
1 7°W 253.79 253.80 40.85 40.86 68.45 68.40
2 8°W 254.32 254.34 39.82 39.78 68.84 68.76
3 20°E 224.05 224.10 66.96 66.96 42.34 42.30
4 26°E 207.98 207.90 70.98 70.92 27.03 27.00
5 30.5°E 191.99 192.06 72.73 72.72 11.60 11.52
6 34°E 178.07 178.02 73.08 73.08 -1.87 -1.80
7 42°E 149.04 149.04 70.44 70.38 -29.89 -29.88
8 56°E 120.99 120.96 59.05 59.04 -56.14 -55.98
9 20°W 259.59 259.56 27.45 27.54 72.30 72.18
10 39°E 158.89 158.94 71.94 72.00 -20.42 -20.34
0.350.22
0.36
-0.13 -0.17
0.18 0.24
-0.35-0.45
-0.06
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0 2 4 6 8 10
HP
BW
Lim
it
Satellite
Elevation
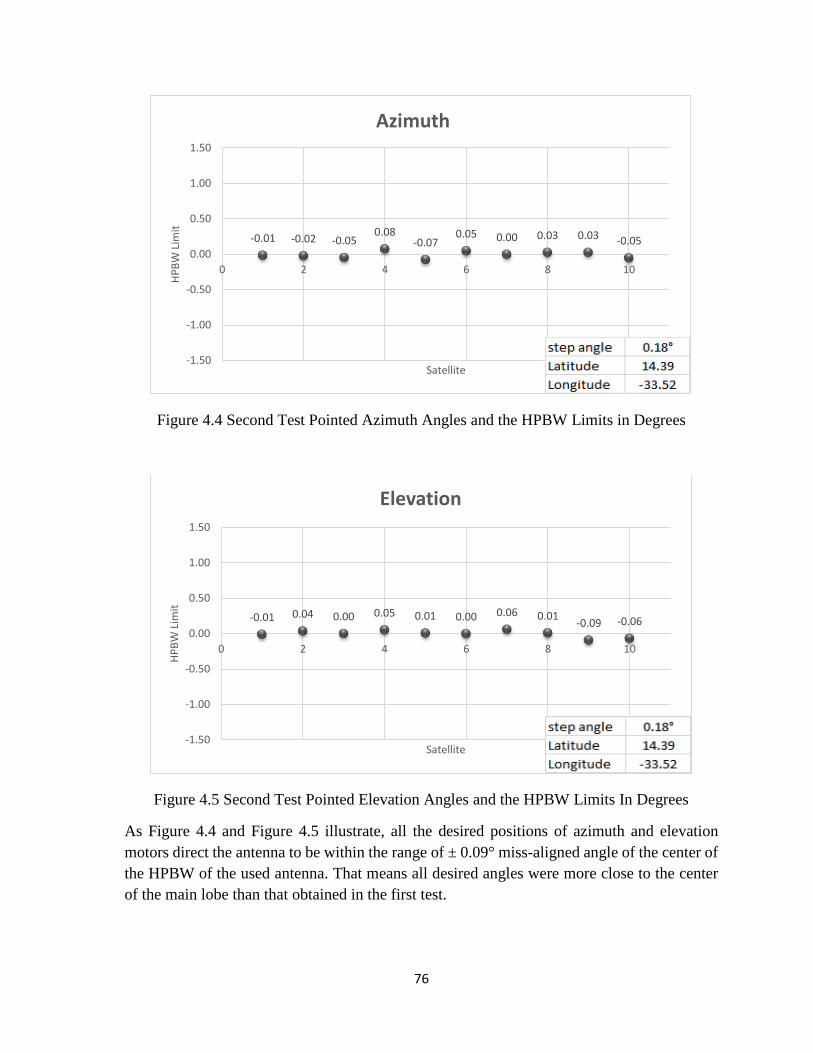
76
Figure 4.4 Second Test Pointed Azimuth Angles and the HPBW Limits in Degrees
Figure 4.5 Second Test Pointed Elevation Angles and the HPBW Limits In Degrees
As Figure 4.4 and Figure 4.5 illustrate, all the desired positions of azimuth and elevation
motors direct the antenna to be within the range of ± 0.09° miss-aligned angle of the center of
the HPBW of the used antenna. That means all desired angles were more close to the center
of the main lobe than that obtained in the first test.
-0.01 -0.02 -0.050.08
-0.070.05 0.00 0.03 0.03 -0.05
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0 2 4 6 8 10
HP
BW
Lim
it
Satellite
Azimuth
-0.01 0.04 0.00 0.05 0.01 0.00 0.06 0.01-0.09 -0.06
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
0 2 4 6 8 10
HP
BW
Lim
it
Satellite
Elevation
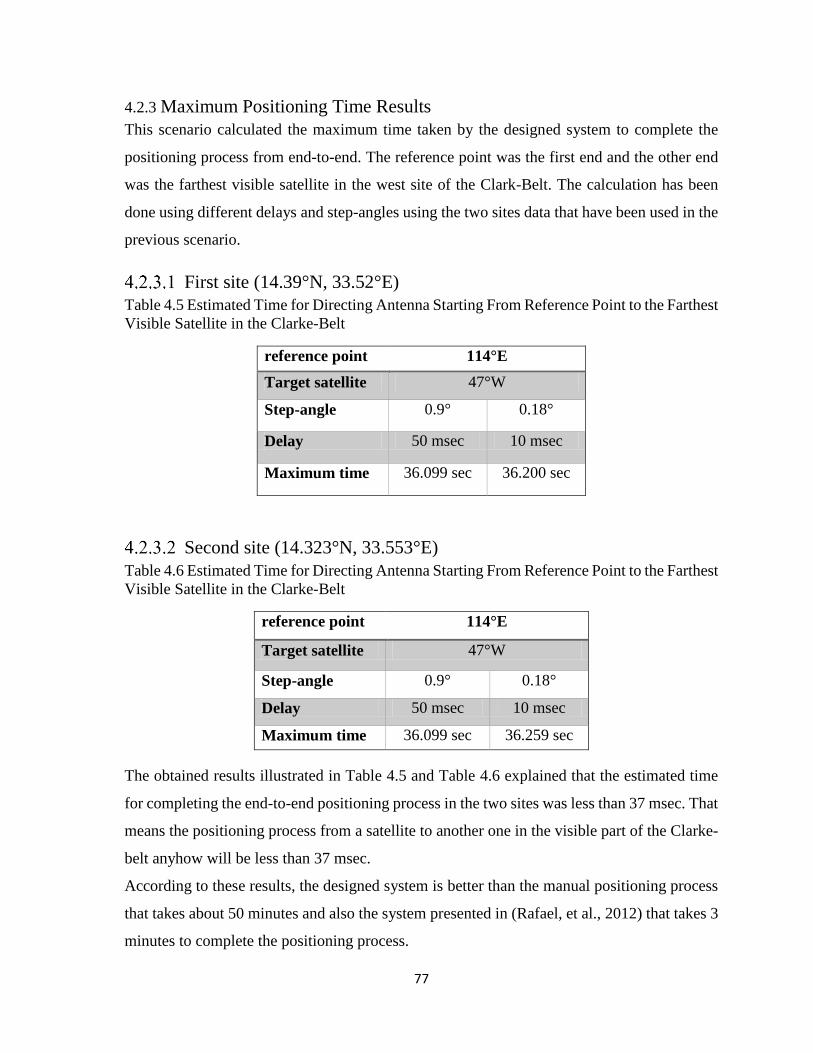
77
4.2.3 Maximum Positioning Time Results
This scenario calculated the maximum time taken by the designed system to complete the
positioning process from end-to-end. The reference point was the first end and the other end
was the farthest visible satellite in the west site of the Clark-Belt. The calculation has been
done using different delays and step-angles using the two sites data that have been used in the
previous scenario.
First site (14.39°N, 33.52°E)
Table 4.5 Estimated Time for Directing Antenna Starting From Reference Point to the Farthest
Visible Satellite in the Clarke-Belt
reference point 114°E
Target satellite 47°W
Step-angle 0.9° 0.18°
Delay 50 msec 10 msec
Maximum time 36.099 sec 36.200 sec
Second site (14.323°N, 33.553°E)
Table 4.6 Estimated Time for Directing Antenna Starting From Reference Point to the Farthest
Visible Satellite in the Clarke-Belt
reference point 114°E
Target satellite 47°W
Step-angle 0.9° 0.18°
Delay 50 msec 10 msec
Maximum time 36.099 sec 36.259 sec
The obtained results illustrated in Table 4.5 and Table 4.6 explained that the estimated time
for completing the end-to-end positioning process in the two sites was less than 37 msec. That
means the positioning process from a satellite to another one in the visible part of the Clarke-
belt anyhow will be less than 37 msec.
According to these results, the designed system is better than the manual positioning process
that takes about 50 minutes and also the system presented in (Rafael, et al., 2012) that takes 3
minutes to complete the positioning process.
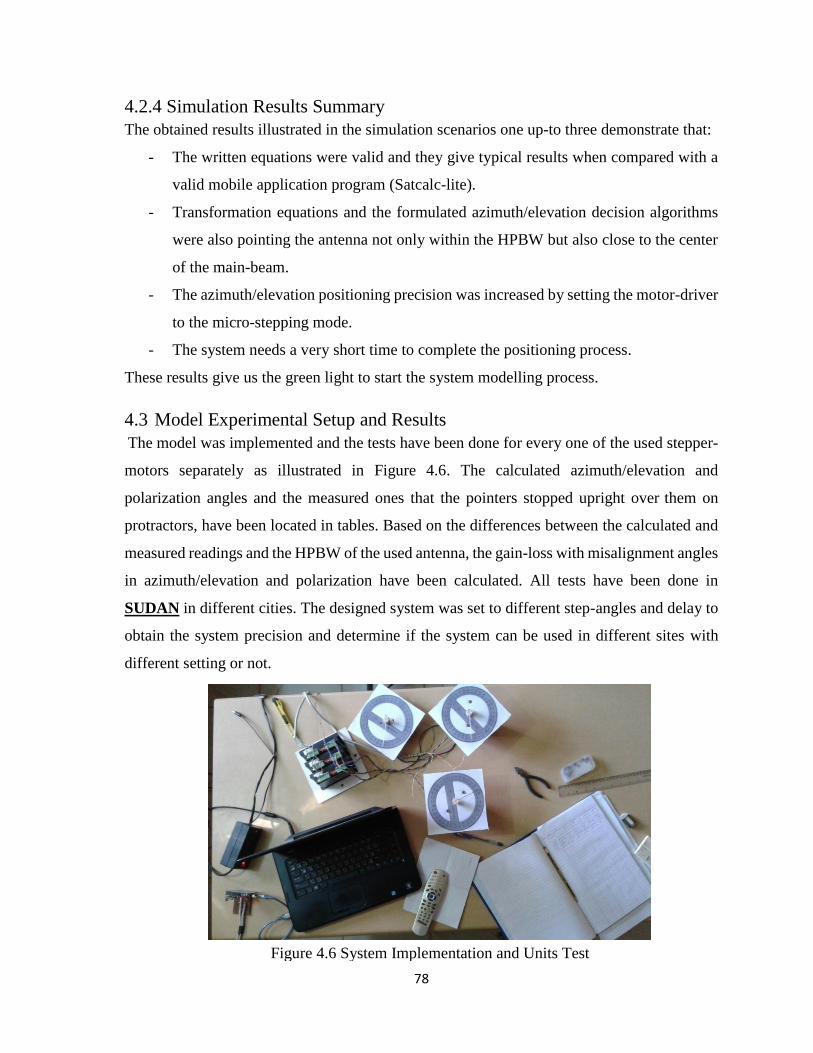
78
Figure 4.6 System Implementation and Units Test
4.2.4 Simulation Results Summary
The obtained results illustrated in the simulation scenarios one up-to three demonstrate that:
- The written equations were valid and they give typical results when compared with a
valid mobile application program (Satcalc-lite).
- Transformation equations and the formulated azimuth/elevation decision algorithms
were also pointing the antenna not only within the HPBW but also close to the center
of the main-beam.
- The azimuth/elevation positioning precision was increased by setting the motor-driver
to the micro-stepping mode.
- The system needs a very short time to complete the positioning process.
These results give us the green light to start the system modelling process.
4.3 Model Experimental Setup and Results
The model was implemented and the tests have been done for every one of the used stepper-
motors separately as illustrated in Figure 4.6. The calculated azimuth/elevation and
polarization angles and the measured ones that the pointers stopped upright over them on
protractors, have been located in tables. Based on the differences between the calculated and
measured readings and the HPBW of the used antenna, the gain-loss with misalignment angles
in azimuth/elevation and polarization have been calculated. All tests have been done in
SUDAN in different cities. The designed system was set to different step-angles and delay to
obtain the system precision and determine if the system can be used in different sites with
different setting or not.
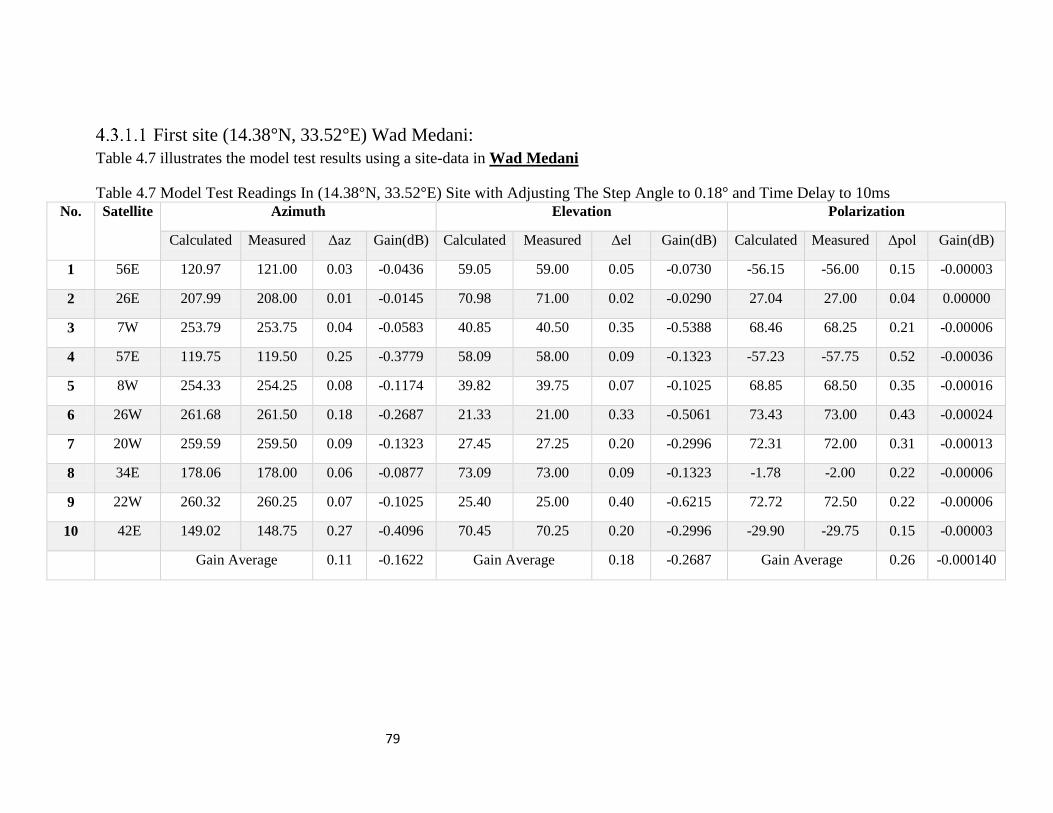
79
First site (14.38°N, 33.52°E) Wad Medani:
Table 4.7 illustrates the model test results using a site-data in Wad Medani
Table 4.7 Model Test Readings In (14.38°N, 33.52°E) Site with Adjusting The Step Angle to 0.18° and Time Delay to 10ms No. Satellite Azimuth Elevation Polarization
Calculated Measured Δaz Gain(dB) Calculated Measured Δel Gain(dB) Calculated Measured Δpol Gain(dB)
1 56E 120.97 121.00 0.03 -0.0436 59.05 59.00 0.05 -0.0730 -56.15 -56.00 0.15 -0.00003
2 26E 207.99 208.00 0.01 -0.0145 70.98 71.00 0.02 -0.0290 27.04 27.00 0.04 0.00000
3 7W 253.79 253.75 0.04 -0.0583 40.85 40.50 0.35 -0.5388 68.46 68.25 0.21 -0.00006
4 57E 119.75 119.50 0.25 -0.3779 58.09 58.00 0.09 -0.1323 -57.23 -57.75 0.52 -0.00036
5 8W 254.33 254.25 0.08 -0.1174 39.82 39.75 0.07 -0.1025 68.85 68.50 0.35 -0.00016
6 26W 261.68 261.50 0.18 -0.2687 21.33 21.00 0.33 -0.5061 73.43 73.00 0.43 -0.00024
7 20W 259.59 259.50 0.09 -0.1323 27.45 27.25 0.20 -0.2996 72.31 72.00 0.31 -0.00013
8 34E 178.06 178.00 0.06 -0.0877 73.09 73.00 0.09 -0.1323 -1.78 -2.00 0.22 -0.00006
9 22W 260.32 260.25 0.07 -0.1025 25.40 25.00 0.40 -0.6215 72.72 72.50 0.22 -0.00006
10 42E 149.02 148.75 0.27 -0.4096 70.45 70.25 0.20 -0.2996 -29.90 -29.75 0.15 -0.00003
Gain Average 0.11 -0.1622 Gain Average 0.18 -0.2687 Gain Average 0.26 -0.000140
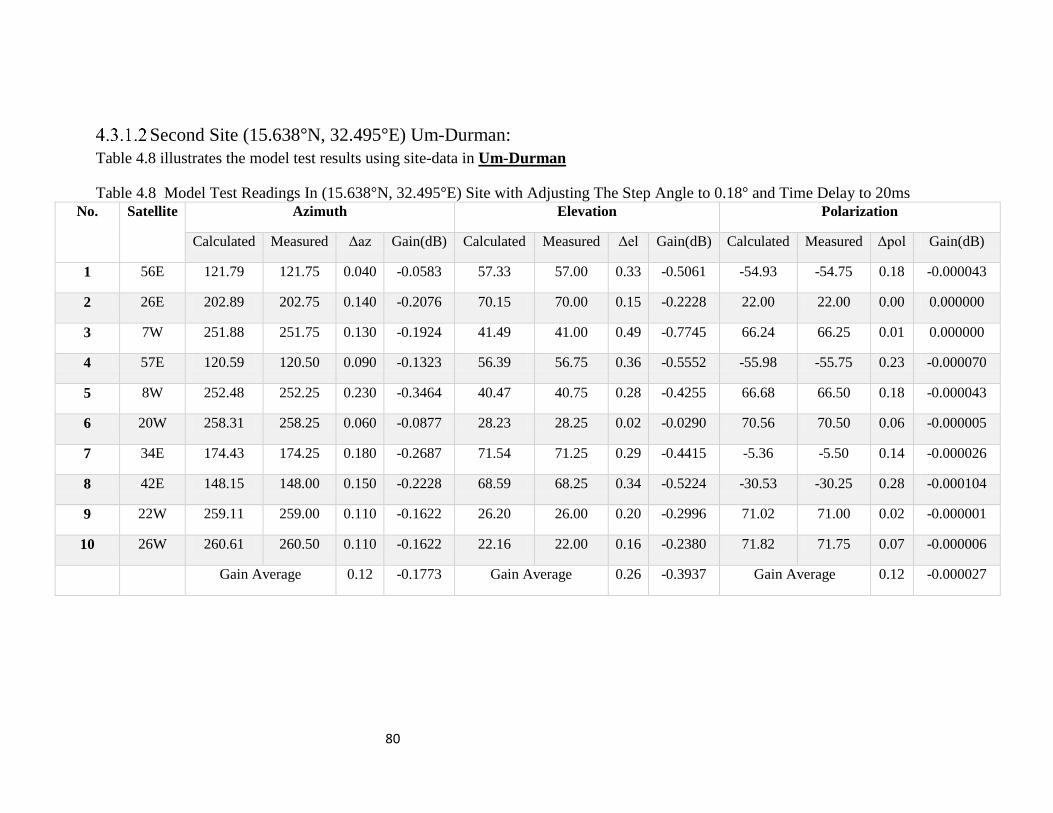
80
Second Site (15.638°N, 32.495°E) Um-Durman:
Table 4.8 illustrates the model test results using site-data in Um-Durman
Table 4.8 Model Test Readings In (15.638°N, 32.495°E) Site with Adjusting The Step Angle to 0.18° and Time Delay to 20ms No. Satellite Azimuth Elevation Polarization
Calculated Measured Δaz Gain(dB) Calculated Measured Δel Gain(dB) Calculated Measured Δpol Gain(dB)
1 56E 121.79 121.75 0.040 -0.0583 57.33 57.00 0.33 -0.5061 -54.93 -54.75 0.18 -0.000043
2 26E 202.89 202.75 0.140 -0.2076 70.15 70.00 0.15 -0.2228 22.00 22.00 0.00 0.000000
3 7W 251.88 251.75 0.130 -0.1924 41.49 41.00 0.49 -0.7745 66.24 66.25 0.01 0.000000
4 57E 120.59 120.50 0.090 -0.1323 56.39 56.75 0.36 -0.5552 -55.98 -55.75 0.23 -0.000070
5 8W 252.48 252.25 0.230 -0.3464 40.47 40.75 0.28 -0.4255 66.68 66.50 0.18 -0.000043
6 20W 258.31 258.25 0.060 -0.0877 28.23 28.25 0.02 -0.0290 70.56 70.50 0.06 -0.000005
7 34E 174.43 174.25 0.180 -0.2687 71.54 71.25 0.29 -0.4415 -5.36 -5.50 0.14 -0.000026
8 42E 148.15 148.00 0.150 -0.2228 68.59 68.25 0.34 -0.5224 -30.53 -30.25 0.28 -0.000104
9 22W 259.11 259.00 0.110 -0.1622 26.20 26.00 0.20 -0.2996 71.02 71.00 0.02 -0.000001
10 26W 260.61 260.50 0.110 -0.1622 22.16 22.00 0.16 -0.2380 71.82 71.75 0.07 -0.000006
Gain Average 0.12 -0.1773 Gain Average 0.26 -0.3937 Gain Average 0.12 -0.000027
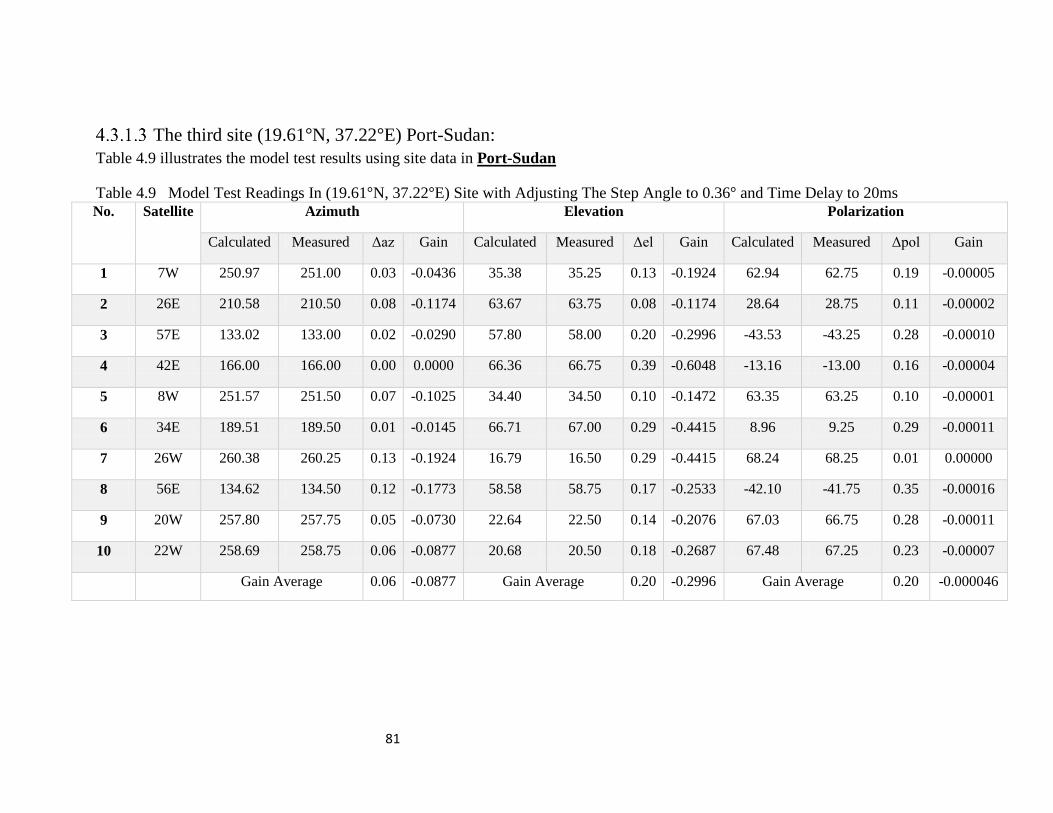
81
The third site (19.61°N, 37.22°E) Port-Sudan:
Table 4.9 illustrates the model test results using site data in Port-Sudan
Table 4.9 Model Test Readings In (19.61°N, 37.22°E) Site with Adjusting The Step Angle to 0.36° and Time Delay to 20ms No. Satellite Azimuth Elevation Polarization
Calculated Measured Δaz Gain Calculated Measured Δel Gain Calculated Measured Δpol Gain
1 7W 250.97 251.00 0.03 -0.0436 35.38 35.25 0.13 -0.1924 62.94 62.75 0.19 -0.00005
2 26E 210.58 210.50 0.08 -0.1174 63.67 63.75 0.08 -0.1174 28.64 28.75 0.11 -0.00002
3 57E 133.02 133.00 0.02 -0.0290 57.80 58.00 0.20 -0.2996 -43.53 -43.25 0.28 -0.00010
4 42E 166.00 166.00 0.00 0.0000 66.36 66.75 0.39 -0.6048 -13.16 -13.00 0.16 -0.00004
5 8W 251.57 251.50 0.07 -0.1025 34.40 34.50 0.10 -0.1472 63.35 63.25 0.10 -0.00001
6 34E 189.51 189.50 0.01 -0.0145 66.71 67.00 0.29 -0.4415 8.96 9.25 0.29 -0.00011
7 26W 260.38 260.25 0.13 -0.1924 16.79 16.50 0.29 -0.4415 68.24 68.25 0.01 0.00000
8 56E 134.62 134.50 0.12 -0.1773 58.58 58.75 0.17 -0.2533 -42.10 -41.75 0.35 -0.00016
9 20W 257.80 257.75 0.05 -0.0730 22.64 22.50 0.14 -0.2076 67.03 66.75 0.28 -0.00011
10 22W 258.69 258.75 0.06 -0.0877 20.68 20.50 0.18 -0.2687 67.48 67.25 0.23 -0.00007
Gain Average 0.06 -0.0877 Gain Average 0.20 -0.2996 Gain Average 0.20 -0.000046
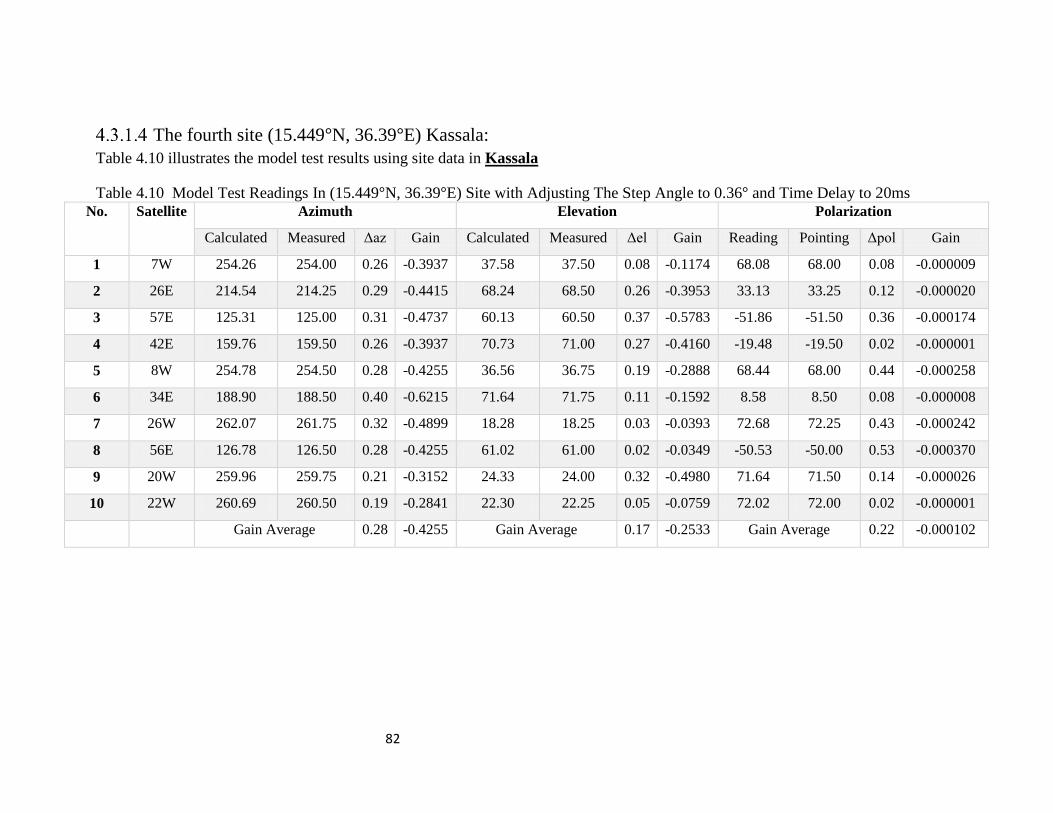
82
The fourth site (15.449°N, 36.39°E) Kassala:
Table 4.10 illustrates the model test results using site data in Kassala
Table 4.10 Model Test Readings In (15.449°N, 36.39°E) Site with Adjusting The Step Angle to 0.36° and Time Delay to 20ms No. Satellite Azimuth Elevation Polarization
Calculated Measured Δaz Gain Calculated Measured Δel Gain Reading Pointing Δpol Gain
1 7W 254.26 254.00 0.26 -0.3937 37.58 37.50 0.08 -0.1174 68.08 68.00 0.08 -0.000009
2 26E 214.54 214.25 0.29 -0.4415 68.24 68.50 0.26 -0.3953 33.13 33.25 0.12 -0.000020
3 57E 125.31 125.00 0.31 -0.4737 60.13 60.50 0.37 -0.5783 -51.86 -51.50 0.36 -0.000174
4 42E 159.76 159.50 0.26 -0.3937 70.73 71.00 0.27 -0.4160 -19.48 -19.50 0.02 -0.000001
5 8W 254.78 254.50 0.28 -0.4255 36.56 36.75 0.19 -0.2888 68.44 68.00 0.44 -0.000258
6 34E 188.90 188.50 0.40 -0.6215 71.64 71.75 0.11 -0.1592 8.58 8.50 0.08 -0.000008
7 26W 262.07 261.75 0.32 -0.4899 18.28 18.25 0.03 -0.0393 72.68 72.25 0.43 -0.000242
8 56E 126.78 126.50 0.28 -0.4255 61.02 61.00 0.02 -0.0349 -50.53 -50.00 0.53 -0.000370
9 20W 259.96 259.75 0.21 -0.3152 24.33 24.00 0.32 -0.4980 71.64 71.50 0.14 -0.000026
10 22W 260.69 260.50 0.19 -0.2841 22.30 22.25 0.05 -0.0759 72.02 72.00 0.02 -0.000001
Gain Average 0.28 -0.4255 Gain Average 0.17 -0.2533 Gain Average 0.22 -0.000102
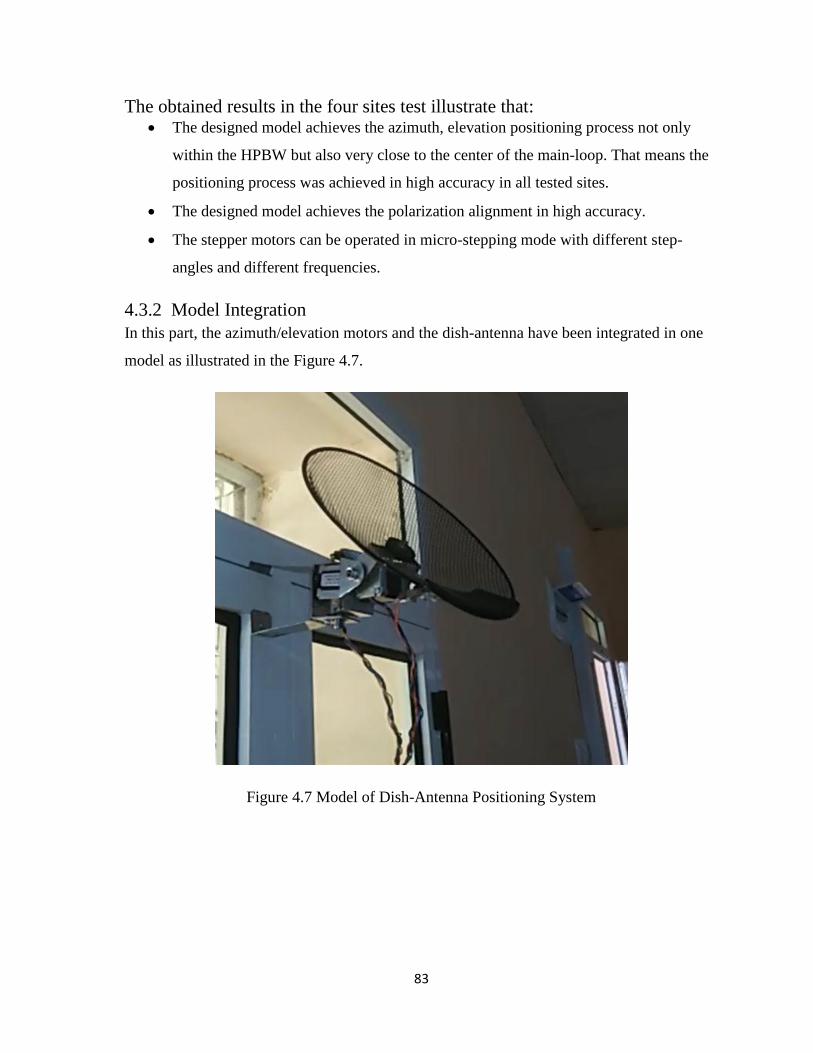
83
The obtained results in the four sites test illustrate that: The designed model achieves the azimuth, elevation positioning process not only
within the HPBW but also very close to the center of the main-loop. That means the
positioning process was achieved in high accuracy in all tested sites.
The designed model achieves the polarization alignment in high accuracy.
The stepper motors can be operated in micro-stepping mode with different step-
angles and different frequencies.
4.3.2 Model Integration
In this part, the azimuth/elevation motors and the dish-antenna have been integrated in one
model as illustrated in the Figure 4.7.
Figure 4.7 Model of Dish-Antenna Positioning System
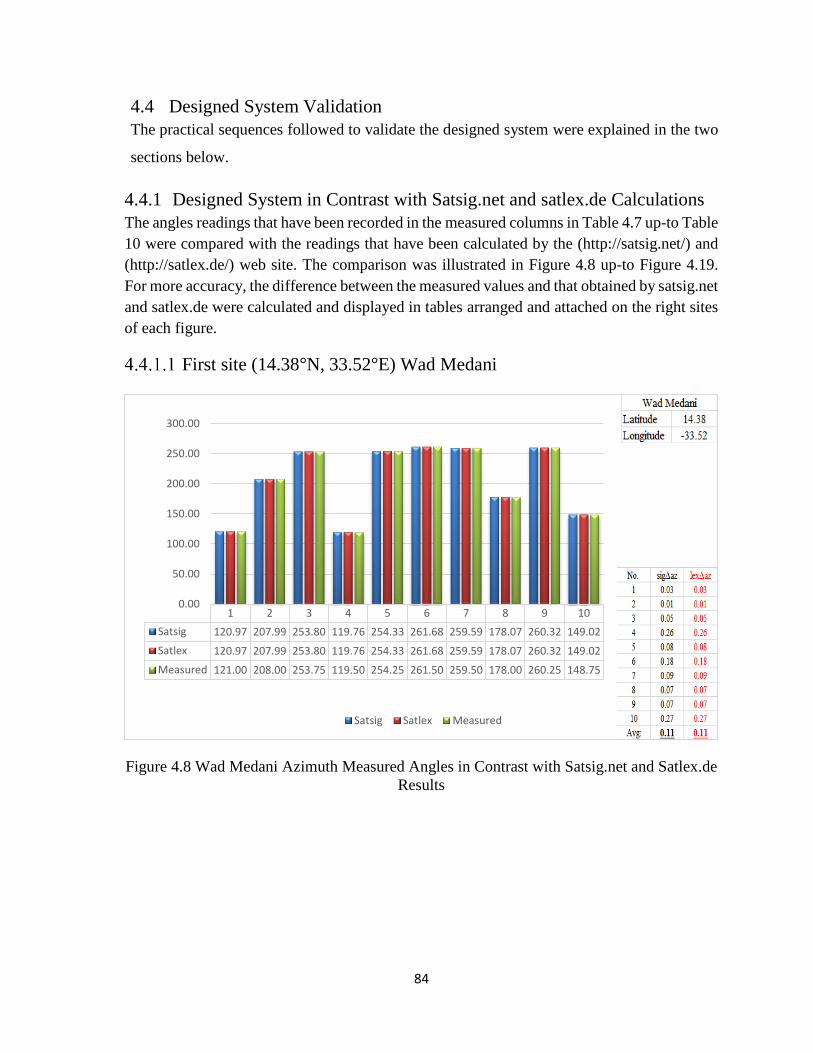
84
4.4 Designed System Validation
The practical sequences followed to validate the designed system were explained in the two
sections below.
4.4.1 Designed System in Contrast with Satsig.net and satlex.de Calculations
The angles readings that have been recorded in the measured columns in Table 4.7 up-to Table
10 were compared with the readings that have been calculated by the (http://satsig.net/) and
(http://satlex.de/) web site. The comparison was illustrated in Figure 4.8 up-to Figure 4.19.
For more accuracy, the difference between the measured values and that obtained by satsig.net
and satlex.de were calculated and displayed in tables arranged and attached on the right sites
of each figure.
First site (14.38°N, 33.52°E) Wad Medani
Figure 4.8 Wad Medani Azimuth Measured Angles in Contrast with Satsig.net and Satlex.de
Results
1 2 3 4 5 6 7 8 9 10
Satsig 120.97 207.99 253.80 119.76 254.33 261.68 259.59 178.07 260.32 149.02
Satlex 120.97 207.99 253.80 119.76 254.33 261.68 259.59 178.07 260.32 149.02
Measured 121.00 208.00 253.75 119.50 254.25 261.50 259.50 178.00 260.25 148.75
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Satsig Satlex Measured
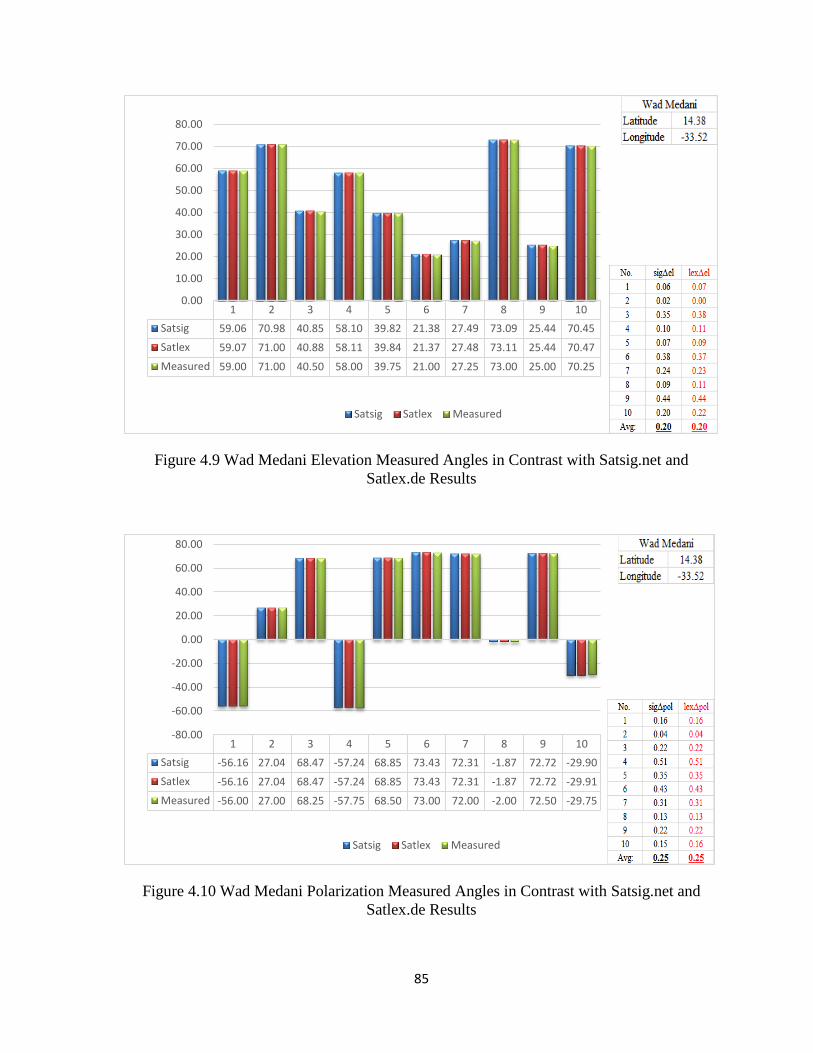
85
Figure 4.9 Wad Medani Elevation Measured Angles in Contrast with Satsig.net and
Satlex.de Results
Figure 4.10 Wad Medani Polarization Measured Angles in Contrast with Satsig.net and
Satlex.de Results
1 2 3 4 5 6 7 8 9 10
Satsig 59.06 70.98 40.85 58.10 39.82 21.38 27.49 73.09 25.44 70.45
Satlex 59.07 71.00 40.88 58.11 39.84 21.37 27.48 73.11 25.44 70.47
Measured 59.00 71.00 40.50 58.00 39.75 21.00 27.25 73.00 25.00 70.25
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
Satsig Satlex Measured
1 2 3 4 5 6 7 8 9 10
Satsig -56.16 27.04 68.47 -57.24 68.85 73.43 72.31 -1.87 72.72 -29.90
Satlex -56.16 27.04 68.47 -57.24 68.85 73.43 72.31 -1.87 72.72 -29.91
Measured -56.00 27.00 68.25 -57.75 68.50 73.00 72.00 -2.00 72.50 -29.75
-80.00
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
Satsig Satlex Measured
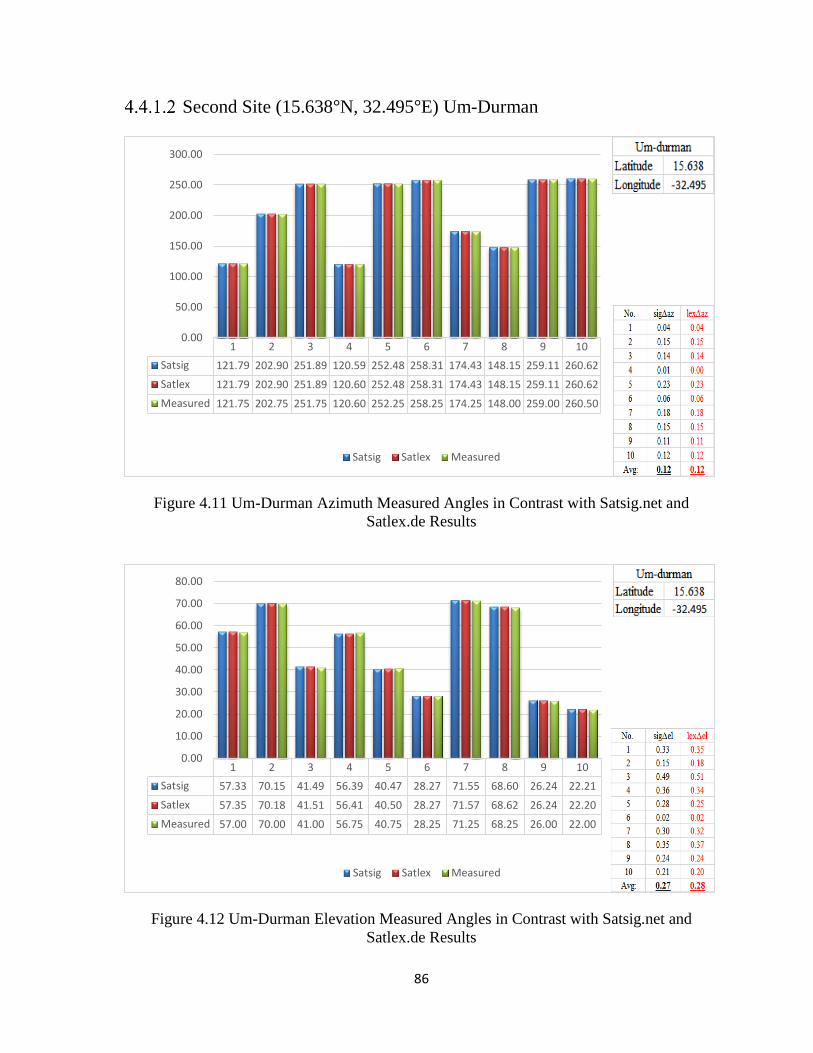
86
Second Site (15.638°N, 32.495°E) Um-Durman
Figure 4.11 Um-Durman Azimuth Measured Angles in Contrast with Satsig.net and
Satlex.de Results
Figure 4.12 Um-Durman Elevation Measured Angles in Contrast with Satsig.net and
Satlex.de Results
1 2 3 4 5 6 7 8 9 10
Satsig 121.79 202.90 251.89 120.59 252.48 258.31 174.43 148.15 259.11 260.62
Satlex 121.79 202.90 251.89 120.60 252.48 258.31 174.43 148.15 259.11 260.62
Measured 121.75 202.75 251.75 120.60 252.25 258.25 174.25 148.00 259.00 260.50
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Satsig Satlex Measured
1 2 3 4 5 6 7 8 9 10
Satsig 57.33 70.15 41.49 56.39 40.47 28.27 71.55 68.60 26.24 22.21
Satlex 57.35 70.18 41.51 56.41 40.50 28.27 71.57 68.62 26.24 22.20
Measured 57.00 70.00 41.00 56.75 40.75 28.25 71.25 68.25 26.00 22.00
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
Satsig Satlex Measured
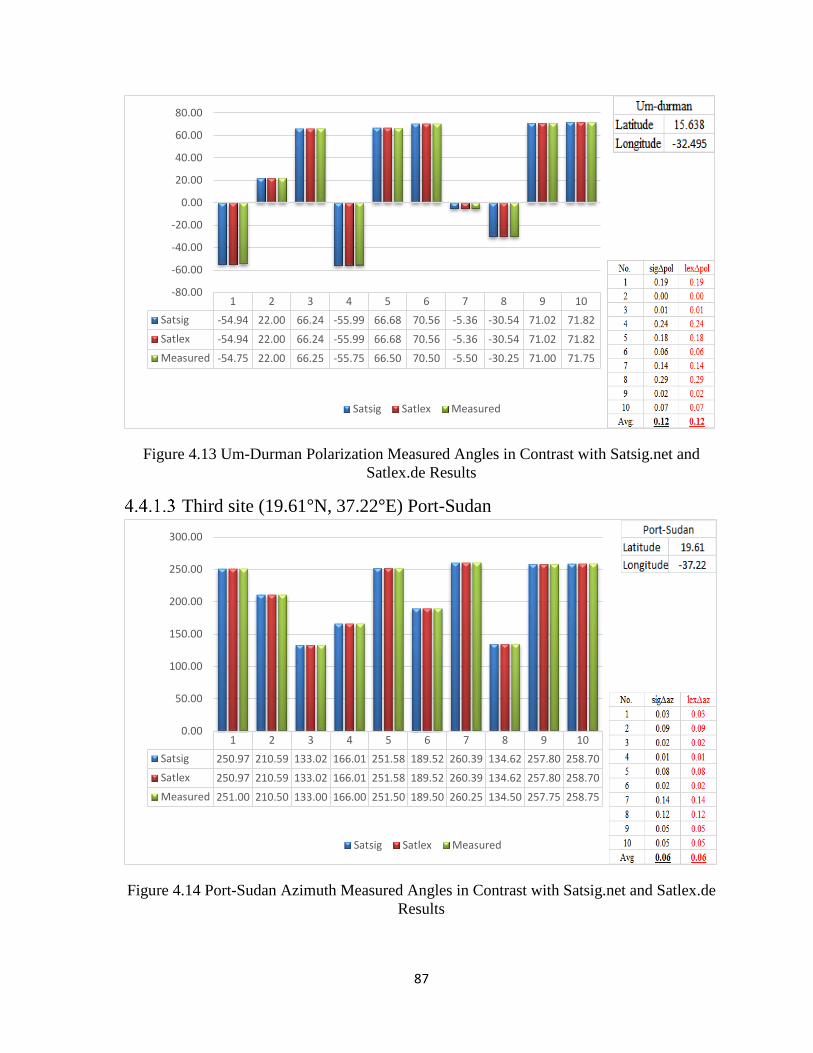
87
Figure 4.13 Um-Durman Polarization Measured Angles in Contrast with Satsig.net and
Satlex.de Results
Third site (19.61°N, 37.22°E) Port-Sudan
Figure 4.14 Port-Sudan Azimuth Measured Angles in Contrast with Satsig.net and Satlex.de
Results
1 2 3 4 5 6 7 8 9 10
Satsig -54.94 22.00 66.24 -55.99 66.68 70.56 -5.36 -30.54 71.02 71.82
Satlex -54.94 22.00 66.24 -55.99 66.68 70.56 -5.36 -30.54 71.02 71.82
Measured -54.75 22.00 66.25 -55.75 66.50 70.50 -5.50 -30.25 71.00 71.75
-80.00
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
Satsig Satlex Measured
1 2 3 4 5 6 7 8 9 10
Satsig 250.97 210.59 133.02 166.01 251.58 189.52 260.39 134.62 257.80 258.70
Satlex 250.97 210.59 133.02 166.01 251.58 189.52 260.39 134.62 257.80 258.70
Measured 251.00 210.50 133.00 166.00 251.50 189.50 260.25 134.50 257.75 258.75
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Satsig Satlex Measured
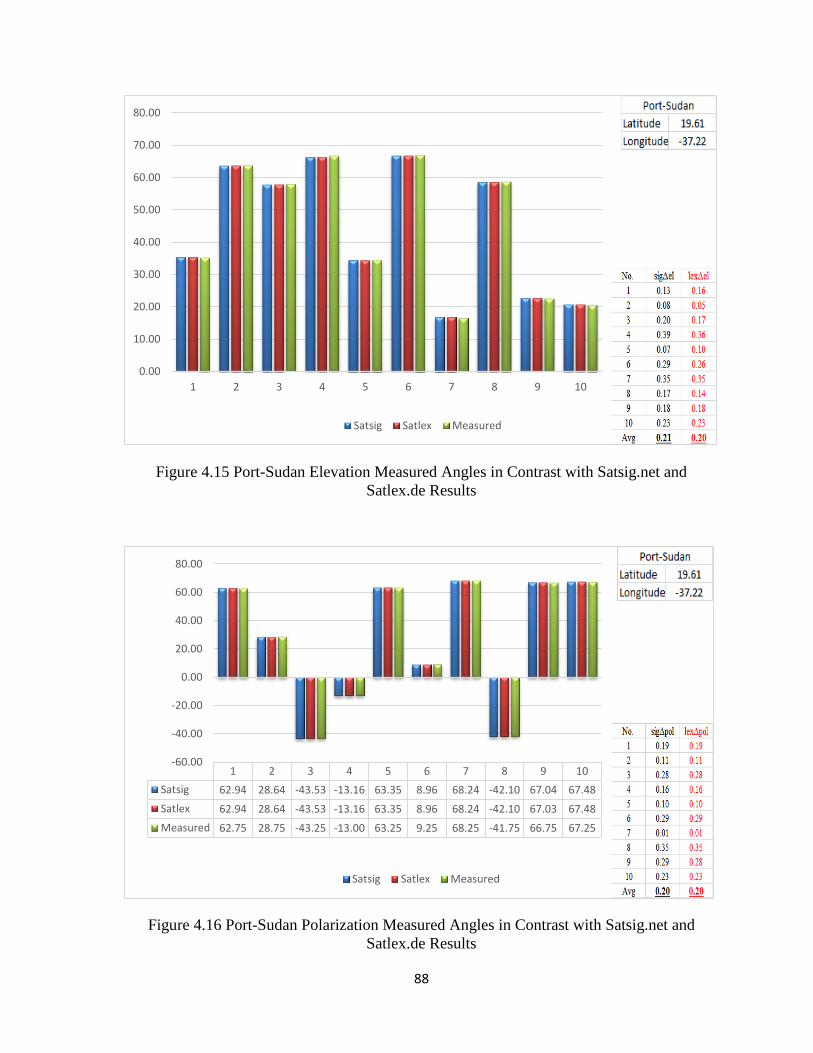
88
Figure 4.15 Port-Sudan Elevation Measured Angles in Contrast with Satsig.net and
Satlex.de Results
Figure 4.16 Port-Sudan Polarization Measured Angles in Contrast with Satsig.net and
Satlex.de Results
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
1 2 3 4 5 6 7 8 9 10
Satsig Satlex Measured
1 2 3 4 5 6 7 8 9 10
Satsig 62.94 28.64 -43.53 -13.16 63.35 8.96 68.24 -42.10 67.04 67.48
Satlex 62.94 28.64 -43.53 -13.16 63.35 8.96 68.24 -42.10 67.03 67.48
Measured 62.75 28.75 -43.25 -13.00 63.25 9.25 68.25 -41.75 66.75 67.25
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
Satsig Satlex Measured
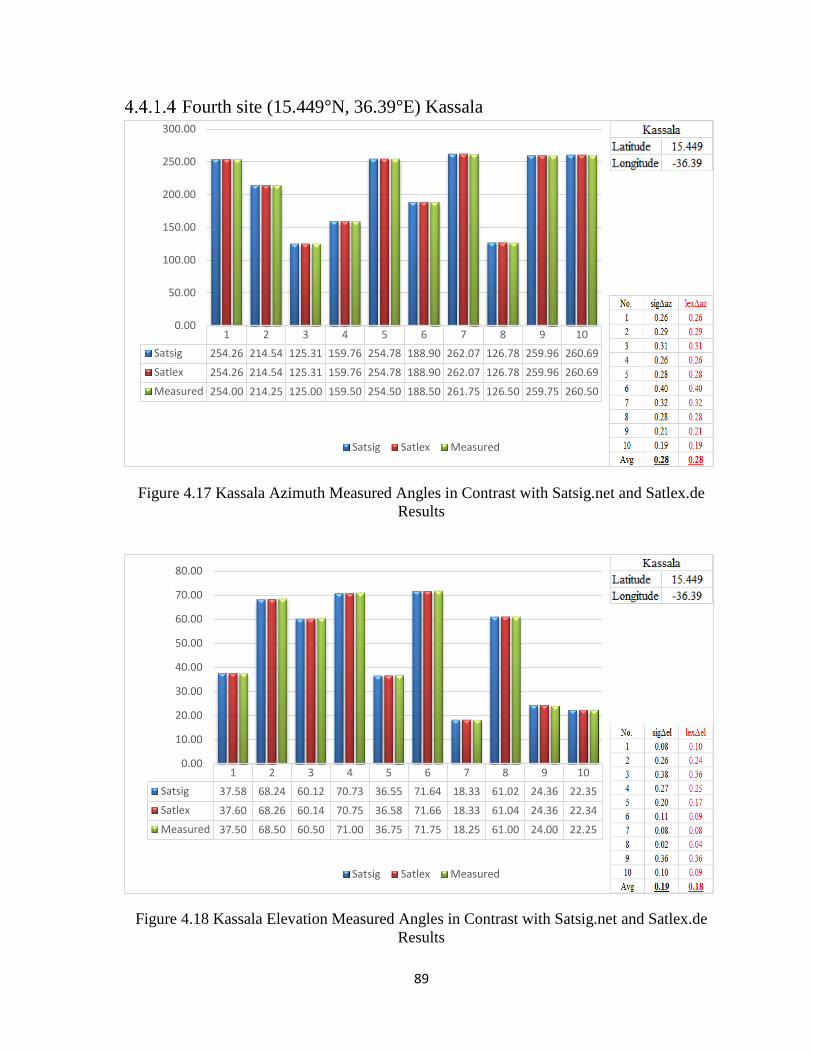
89
Fourth site (15.449°N, 36.39°E) Kassala
Figure 4.17 Kassala Azimuth Measured Angles in Contrast with Satsig.net and Satlex.de
Results
Figure 4.18 Kassala Elevation Measured Angles in Contrast with Satsig.net and Satlex.de
Results
1 2 3 4 5 6 7 8 9 10
Satsig 254.26 214.54 125.31 159.76 254.78 188.90 262.07 126.78 259.96 260.69
Satlex 254.26 214.54 125.31 159.76 254.78 188.90 262.07 126.78 259.96 260.69
Measured 254.00 214.25 125.00 159.50 254.50 188.50 261.75 126.50 259.75 260.50
0.00
50.00
100.00
150.00
200.00
250.00
300.00
Satsig Satlex Measured
1 2 3 4 5 6 7 8 9 10
Satsig 37.58 68.24 60.12 70.73 36.55 71.64 18.33 61.02 24.36 22.35
Satlex 37.60 68.26 60.14 70.75 36.58 71.66 18.33 61.04 24.36 22.34
Measured 37.50 68.50 60.50 71.00 36.75 71.75 18.25 61.00 24.00 22.25
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
Satsig Satlex Measured
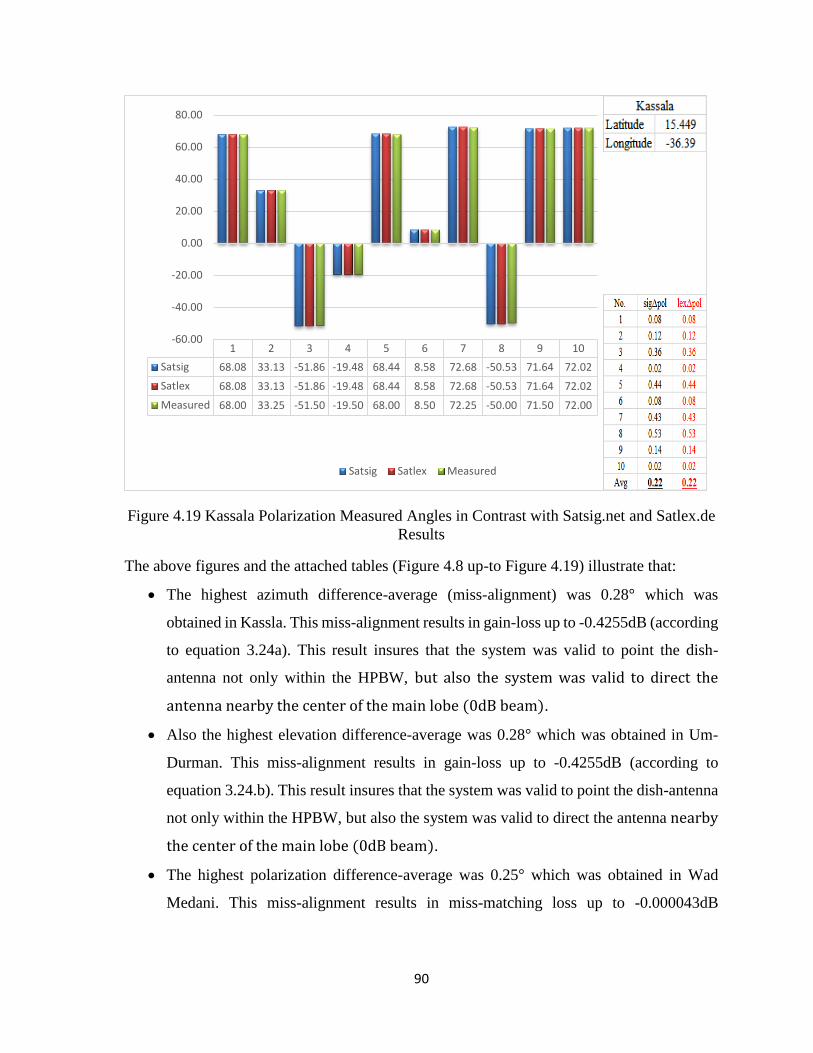
90
Figure 4.19 Kassala Polarization Measured Angles in Contrast with Satsig.net and Satlex.de
Results
The above figures and the attached tables (Figure 4.8 up-to Figure 4.19) illustrate that:
The highest azimuth difference-average (miss-alignment) was 0.28° which was
obtained in Kassla. This miss-alignment results in gain-loss up to -0.4255dB (according
to equation 3.24a). This result insures that the system was valid to point the dish-
antenna not only within the HPBW, but also the system was valid to direct the
antenna nearby the center of the main lobe (0dB beam).
Also the highest elevation difference-average was 0.28° which was obtained in Um-
Durman. This miss-alignment results in gain-loss up to -0.4255dB (according to
equation 3.24.b). This result insures that the system was valid to point the dish-antenna
not only within the HPBW, but also the system was valid to direct the antenna nearby
the center of the main lobe (0dB beam).
The highest polarization difference-average was 0.25° which was obtained in Wad
Medani. This miss-alignment results in miss-matching loss up to -0.000043dB
1 2 3 4 5 6 7 8 9 10
Satsig 68.08 33.13 -51.86 -19.48 68.44 8.58 72.68 -50.53 71.64 72.02
Satlex 68.08 33.13 -51.86 -19.48 68.44 8.58 72.68 -50.53 71.64 72.02
Measured 68.00 33.25 -51.50 -19.50 68.00 8.50 72.25 -50.00 71.50 72.00
-60.00
-40.00
-20.00
0.00
20.00
40.00
60.00
80.00
Satsig Satlex Measured
91
(according to equation 3.24.c). This result insures that the system was valid to align the
LNB with the satellite signal source.
4.4.2 Comparison between the Designed System and Related Studies
The properties of the designed system were highlighted and compared with that mentioned
in the related studies. The comparison was done based on a number of points shown in the
below points.
Positioning Time
The designed system achieved the positioning task with high accuracy in not more than
40 seconds instead of a number of minutes taken by the other systems or consuming long
time in manual positioning process.
Polarization alignment
The designed system is concerned with adjusting the antenna polarization as well as
pointing the antenna in azimuth and elevation.
Reduce the hardware and avoid complexity
The research focused in designing and developing the software-driver to reduce the
hardware that was found in the closed-loop systems and avoid the complexity of the PID,
PI and LQR controllers. Also to reduce the hardware, the designed system was based on
micro-controller and IR-remote control instead of PC.
Simple to use and develop
The designed system uses new technology (Arduino micro-controller) that was very
simple to be implemented and developed. Also it is simple to be handled by the user
because it uses a familiar tool to be controlled (public IR-remote control).
Portable System
The designed system can be tested in different sites all-round the northern hemisphere. It
needs only updating the site-data (latitude, longitude).
92
CHAPTER FIVE
CONCLUSIONS AND RECOMMENDATIONS
5.1 Conclusions
Based on the theories, methodology, experimental results and discussions illustrated in the
previous chapters, the designed model which was based on microcontroller Arduino Uno card,
stepper-motors and IR-remote control, achieves the goal of the research (design a small dish-
antenna control system model for receiving signals from geostationary satellites operating in
Ku-band). The designed model was tested using different sites data (longitude, latitude) for
different locations in Sudan (Wad Medani, Um-Durman, Port-Sudan and Kassala). The results
illustrate that the model achieves the azimuth/elevation positioning process in high precision.
The highest azimuth difference-average (miss-alignment) was 0.28° obtained in Kassla with
gain-loss up to -0.4255dB. Also the highest elevation difference-average was 0.28° obtained
in Um-Durman with gain-loss up to -0.4255dB. For the polarization, the highest difference-
average was 0.25° obtained in Wad Medani with miss-matching loss up to -0.000043dB. Also
the model improves the directing time. It takes 40 seconds to achieve the intended position
when compared with the previous studies where the minimum directing time was 3 minutes.
The research contributes in the satellite positioning systems in a number of issues that can be
arranged in: reducing the system hardware, avoiding the complexity of the closed-loop control
system that was found in existing systems, providing an effective positioning system, offering
a controlled system that can be embedded in the commercial IRDs or STBs, delivering an
easy-to-use technology for the users, navigating between satellites and increasing the number
of channels that can be watched.
5.2 Recommendations
The system was studied in sites in the northern part of the earth. The research
recommends the study of the designed system in the southern hemisphere as well as
in the northern one.
The research deals with studying the system software design and the general features
of the model and not caring for the antenna weight and the optimum motors torque
93
calculations. More works must be done in this part to operate the designed system in
a save mode.
Also the research recommends to apply this system in real to be validated by receiving
real signals from a number of visible satellites.
94
6 References
Abdul Rehman, Chishti; Bukhari, Syed Fasih-Ur-Rehman; Khaliq, Hafiz Saad; Khan,
Mohammad Hunain; Bukhari, Syed Zulfiqar Haider, 2014. Radio Telescope Antenna
Azimuth Position Control System Design and Analysis in Matlab/Simulink Using PID and
LQR Controller. Buletinul Institutului Politehnic Din Iaşi. LX (LXIV), Volume 3-4, pp. 45-
57.
Acarnley, P., (2007). Stepping Motors a Guide to Theory and Practice. 4th ed. United
Kingdom: The Institution of Enngineering and Technology.
Balanis, C. A., (2005). Antenna Theory Analysis and Design. 3rd ed. United States of
America: John Wiley and Sons.
Bhuyan, M. H., (2007). Wireless Control System for Dc Motor to Position a Dish Antenna
Using Microcomputer. Journal of Science and Technology, 2(1), pp. 44-49.
Brooks, D. R., (2015). Arduino-Based Dataloggers: Hardware and Software. Institute for
Earth Science Research and Education, Volume V 1.2.
Condit, R. and Jones, D. D. W., (2004). Stepping Motors Fundamentals. Microchip
Technology Inc., pp. 1-26.
Didactic, F., (2015). Satellite Orbits, Coverage, and Antenna Alignment. 1st ed. Canada: Festo
Didactic Ltee/Ltd.
Elbert, B. R., (2008). Introduction to Satellite Communication. 3rd ed. United States of
America: ARTECH HOUSE.
Evans, B. W., (2007). Arduino Programming Notebook. 1st ed. s.l.:Creative Commons
Attribution-Noncommercial-Share Alike 3.0 License..
Fung, C., (2011). Basic Antenna Theory and Application, s.l.: Project Number: SNM MQP
0414.
Grant, M., (2005). Quick Start for Beginners to Drive a Stepper Motor, Ver.1: Freescale
Semiconductor, Inc.
He, G., G.Li and Huang, M. L. a. Y., (2009). LQG Controller with Wind Gust Disturbance
Rejection Property for Cassegrain Antenna. s.l., Proceedings of IEEE International
Conference on Intelligent Computing and Intelligent Systems (ICIS),2: 344-348.
Jia, J and Qin, L. X. a. Y., (2009). Study of Adaptive Variable Structure Attitude Control and
its full Physical Simulation of Multi-Body Satellite Antenna Drive Control. , Proceedings of
World Congess on Computer and Information Engineering (WRI), 2: 546-549.
95
Kolawole, M. O., (2002). Satellite Communication Engineering. 1st ed. United States of
America,New York: Marcel Dekker.
Linus Aloo, A., Kihato, P. K. and Kamau, S. I., (2016). DC Servomotor-based Antenna
Positioning Control System Design using Hybrid PID-LQR Controller. European
International Journal of Science and Technology, 5(2), pp. 17-31.
Lwin, M. M. and Win, N. N., (2014). Microcontroller Based Smart Solar Tracking System.
International Journal of Scientific Engineering and Technology Research, 3(9), pp. 1845-
1859.
Me. Me, Tun, K. O. C. M. N. and Myo, H., (2012). Satellite Dish Positioning Control by DC
Motor Using IR Remote Control. International Journal of Electronics and Computer
Science Engineering, 3(3), pp. 199-207.
Milligan, T. A., (2005). MODERN ANTENNA DESIGN. 2nd ed. United States of America: A
JOHN WILEY and SONS.
Mohammed, A., Noor, S. B. B. M., Hassan, M. K. B. and Soh, A. B. C., (2014). A Review of
Strategies for Parabolic Antenna Control. Australian Journal of Basic and Applied Sciences,
8(7), pp. 135-148.
Mulla, A. A. and Vasambekar, P., (2017). Speed Rate Corrected Antenna Azimuth Axis
Positioning System. International Journal of Electronics Engineering Research, 9(2), pp.
151-158.
Nelson, D. R. A., (2014). Satellite Communication Design and Engineering. [Online]
Available at: http://www.aticourses.com/satellite_communications_systems.htm
[Accessed 28 July 2016].
Ogundele, A., D., E.C.A, A. H. and A, A. Y., (2010). Mathematical Modelling of Antenna
Look Angles of Geostationary Communications Satellite Using Two Models of Control
Stations. International Conference on Advanced Computer Theory and Engineering, 4(3),
pp. 236-240.
Okumus, H. İ., Sahin, E. and Akyazi, O., (2013). Antenna Azimuth Position Control with
Fuzzy Logic and Self-Tuning Fuzzy Logic Controllers. [Online]
Available at: http://www.emo.org.tr/ekler/30721392f46c410_ek.pdf
[Accessed 26 January (2017)].
Otieno, O. R., (2015). Solar Tracker For Solar Panel. University of Nairobi 2015, 24 April.
Prajwal, B., Grover, P. and Pannu, P., (2015). Remote Alignment of Dish Positioning By
Android Application. International Journal of Engineering Research and Management
Technology, 2(2), pp. 267-269.
96
Pran, S. K. et al., (1998). Microcomputer Based Dish Antenna Position Control System.
Dhaka, International Conference on Computer and Information Tech.
Purdum, P. J., (2012). Beginning C for Arduino. 1st ed. : Apress.
Rafael, M. C., Prado, J. B. G. and do, P. P. L., (2012). Development of an Automated System
for Maneuvering Parabolic Dish Antennas Used in Satellite Comunication. ABCM
Symposium Series in Mechatronics, 5(2), pp. 69-78.
Rajini, M. G. and Murthy, M. K. K., (2015). Design and Implementation of Antenna Servo
Control System for Ground Station. International Journal of Professional Engineering
Studies, V(5), pp. 57- 63.
Reid, K. N. and Hamid, S., (2006). SERVOACTUATORS FOR. In: M. Kutz, ed.
Instrumentation, Systems, Controls, and MEMS. s.l.:John Wiley and Sons, Inc., pp. 542-
619.
Roddy, D., (2001). Satellite Communications. 3rd ed. United States of America: McGraw-
Hill.
Russell and Callum, J., (2008). A Control System and Application Program. 20 October, pp.
73-74.
Sandin, P. E., (2003). Robot Mechanisms and Mechanical Devices Illustrated. 1st ed. United
States of America: McGraw-Hill.
Singh, R. H., Reddy, B. R. and B.C.S.Rao, (2013). Design and Implementation of Antenna
Control Servo System for Satellite Ground Station. International Journal of Electrical
Engineering and Technology, 4(4), pp. 93-100.
Stonejk, (2010). Defense Media Center Satellite Handbook. Ver 3.26, s.l.: AFRTS.
Theraja, B. L. and Theraja, A. K., (2006). Special Machines. In: Textbook of electrical
technology in SI units. : S Chand, pp. 1536-1546.
Thomson, I., (2001). Product Selection and Engineering Guide. Thomson Airpax Motors and
Actuators Catalog, pp. 2-9.
Thomson, I., (2013). Stepper Motor Technology. [Online]
Available at: http://courses.cs.washington.edu/courses/cse466/02au/Labs/motor.pdf
[Accessed 24 August (2013)].
Wang, A., Zhang, L. and Wei, L., (2011). The Design and Implementation of the Digital Servo
System for the Satellite Antenna. International Conference on Machines and Systems, pp.
1-5.
97
7 Appendixes
7.1 Appendix [A]
Setup Function
void setup()
// The Section For remote
Serial.begin(9600); // opens serial port, sets data rate to 9600 bps
irrecv.enableIRIn(); // Start the receiver
// This Section For direct The Antenna
// For Controling the Azimuth Stepper Motor
int a;
for (a = 0; a < 100; a++) // to define that we will use for statement in our sketch
pinMode(2, OUTPUT); // Connected to PUL+ pin in the Az stepper motor driver to move the motor
CW
pinMode(3, OUTPUT); // Connected to DIR+ pin in the Az stepper motor driver to move the motor
CCW
// For Controling the Elevation Stepper Motor
pinMode(4, OUTPUT); // Connected to PUL+ pin in the El stepper motor driver to move the motor
CW
pinMode(5, OUTPUT); //Connected to DIR+ pin in the El stepper motor driver to move the motor
CCW
// For Controling the Polarization Stepper Motor
pinMode(6, OUTPUT); //Connected to PUL+ pin in the Pol stepper motor driver to move the motor
CW
pinMode(7, OUTPUT); //Connected to DIR+ pin in the Pol stepper motor driver to move the motor
CCW
// defining Limit switchs of the stepper motors
98
pinMode(SW1, INPUT); // Connected to the Az Reference Point limit switch
pinMode(SW2, INPUT); // Connected to the El Reference Point limit switch
pinMode(SW3, INPUT); // Connected to the Pol Reference Point limit switch
/*---------------- (end setup ) ----------------*/
99
7.2 Appendix [B]
IR-remote encoded hexadecimal number representation sketch
The sketch that was used to display the hexadecimal number represent the IR-remote control keys
was formulated as follow:
#include <IRremote.h>
int RECV_PIN = 13;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
void loop()
if (irrecv.decode(andresults))
Serial.println(results.value, HEX);
irrecv.resume(); // Receive the next value
100
7.3 Appendix [C]
IR-remote Control Decoder
IRDecoder( ) // takes action based on IR code received
// Decoding IR-remote KEYES
switch(results.value)
case 0x807F807F: i=1; Serial.println(i); break;
case 0x807F40BF: i=2; Serial.println(i); break;
case 0x807F609F: i=3; Serial.println(i); break;
case 0x807F20DF: i=4; Serial.println(i); break;
case 0x807FA05F: i=5; Serial.println(i); break;
case 0x807FE01F: i=6; Serial.println(i); break;
case 0x807F10EF: i=7; Serial.println(i); break;
case 0x807F50AF: i=8; Serial.println(i); break;
case 0x807FD02F: i=9; Serial.println(i); break;
case 0x807F708F: i=0; Serial.println(i); break;
case 0x807F8877: i=777; Serial.println("EXIT"); break;
case 0x807F48B7: i=888; Serial.println(" OK "); break;
case 0x807FE817:i=9999; Serial.println(9999); break; // VOL (+)
case 0x807F28D7:i=9999; Serial.println(9999); break; // VOL (-)
case 0x807FA857:i=9999; Serial.println(9999); break; // CH (+)
case 0x807F6897:i=9999; Serial.println(9999); break; // CH (-)
case 0x807F629D:i=1004; Serial.println("FWD"); break; // FWD for skew CW
case 0x807F22DD:i=1005; Serial.println("REW"); break; // REW for skew CCW
case 0x807FE21D:i=1006; Serial.println("ResetSat"); break; // RECALL for ResetSat
101
case 0x807F00FF:i=9999; Serial.println(9999); break; // Power
case 0x807FC03F:i=9999; Serial.println(9999); break; // Mute
case 0x807F30CF:i=9999; Serial.println(9999); break; // TV/RAD
case 0x807FF00F:i=9999; Serial.println(9999); break; // TV/SAT
case 0x807F08F7:i=9999; Serial.println(9999); break; // Menu
case 0x807F18E7:i=9999; Serial.println(9999); break; // EPG
case 0x807F9867:i=9999; Serial.println(9999); break; // INFO
case 0x807FC837:i=9999; Serial.println(9999); break; // GROUP
case 0x807FF807:i=9999; Serial.println(9999); break; // COLOR
case 0x807F7887:i=9999; Serial.println(9999); break; // PAGE up
case 0x807FB04F:i=9999; Serial.println(9999); break; // PAGE down
case 0x807F58A7:i=9999; Serial.println(9999); break; // PAUSE
case 0x807F38C7:i=9999; Serial.println(9999); break; // ZOOM
case 0x807F827D:i=9999; Serial.println(9999); break; // AUDIO
case 0x807F42BD:i=9999; Serial.println(9999); break; // TEXT
case 0x807FB847:i=9999; Serial.println(9999); break; // MULTIVEIW
case 0x807FA25D:i=9999; Serial.println(9999); break; // ADVANCE
case 0x807F02FD:i=9999; Serial.println(9999); break; // REC
case 0x807F906F:i=9999; Serial.println(9999); break; // PLAY
case 0x807FD827:i=9999; Serial.println(9999); break; // STOP
case 0x807FD22D:i=9999; Serial.println(9999); break; // FILE LIST
case 0x807FC23D:i=9999; Serial.println(9999); break; // BOOK MARK
case 0x807FFA05:i=9999; Serial.println(9999); break; // SLEEP
// End Case switch
102
7.4 Appendix [D]
Optimization of motor-driver operation Algorithm
The number of steps that the motors move must be equal to the digits calculated by the
software. Stepper motor-drivers operations can be summarized in four cases based on the
direction of the last operation and the next one as illustrated in the below table.
Theoretically, the motor-drivers change between those cases without any complications. But
practically, it was found that the motor-drivers response for three cases (1st, 3rd and 4th) as
illustrated in Table 7.1. And when the drivers get through the 2nd case (CW to CCW), they
decrease the number of the applied pulses by 2. So the number of steps that the motor moved
will not be equal to the accurate calculated ones. And that results in misalignment in all angles
(azimuth, elevation and polarization).
Table 7.1 The stepper-motor operation cases
Case Last operation Next Operation
1st CW CW
2nd CW CCW
3rd CCW CW
4th CCW CCW
CW Stands for Clock Wise
CCW Stands for Counter Clock Wise
For one operation, this difference may not result in problems when the drivers operate in
micro-stepping mode with a very small step-angle. But when this difference accumulates, the
system will be unreliable.
For solving the above problem and making the designed system operate in a reliable mode, an
optimization algorithm has been developed and formulated as follows:
step 01: Initialize.
step 02: Calculate the different (n) between the calculated number of steps and the last
saved one.
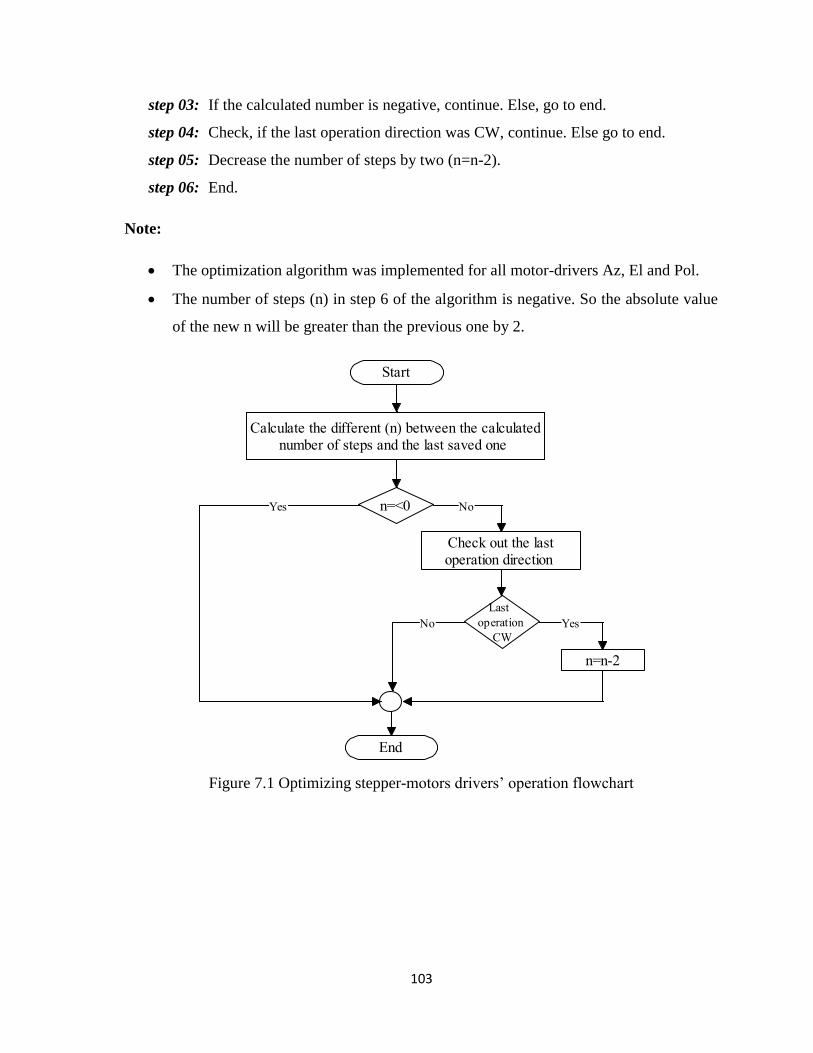
103
step 03: If the calculated number is negative, continue. Else, go to end.
step 04: Check, if the last operation direction was CW, continue. Else go to end.
step 05: Decrease the number of steps by two (n=n-2).
step 06: End.
Note:
The optimization algorithm was implemented for all motor-drivers Az, El and Pol.
The number of steps (n) in step 6 of the algorithm is negative. So the absolute value
of the new n will be greater than the previous one by 2.
Figure 7.1 Optimizing stepper-motors drivers’ operation flowchart
Start
Calculate the different (n) between the calculated number of steps and the last saved one
n=<0 NoNoYesYes
Check out the last operation direction
Last
operation
CW
NoNo YesYes
n=n-2
End
104
7.5 Appendix [E]
The specifications of the used Arduino card are as illustrated below:
ATmega32x 16 MHz Microcontroller
32 KB Flash Memory (program storage)
2 KB SRAM (program execution)
1 KB EEPROM (data storage)
14 Digital I/O Pins (6 PWM outputs)
6 Analog Input Pins
Operating Voltage 5V, 50mA
USB Interface
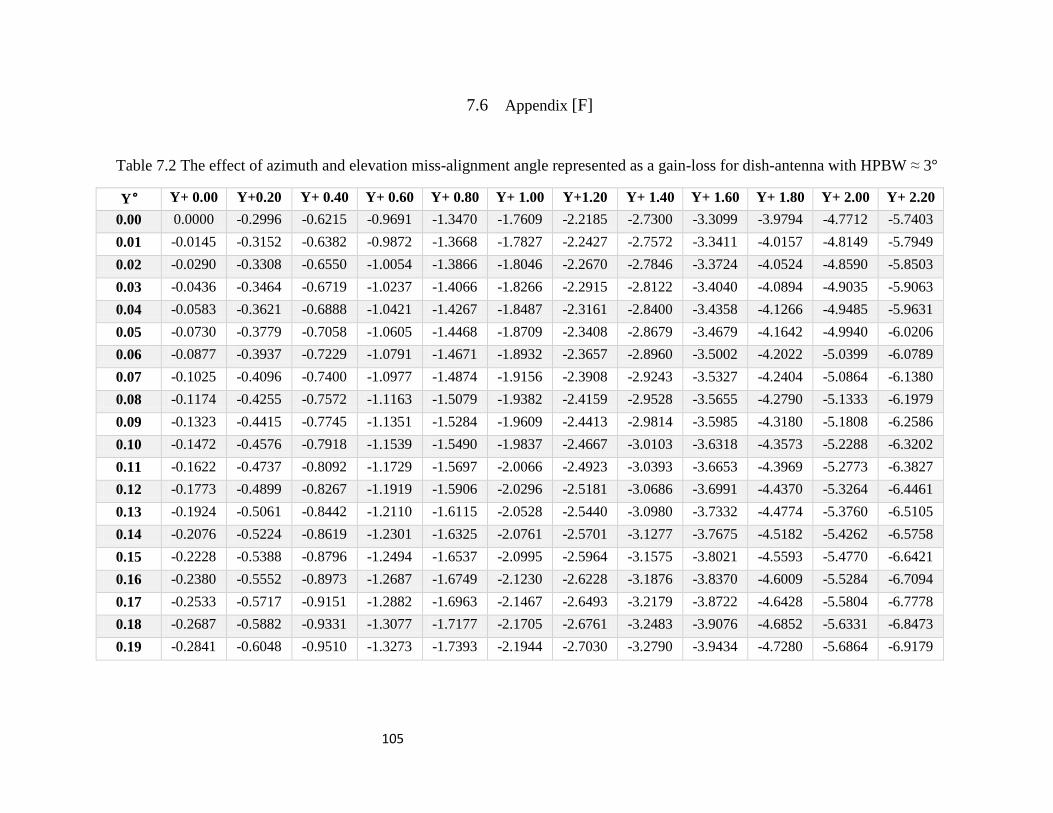
105
7.6 Appendix [F]
Table 7.2 The effect of azimuth and elevation miss-alignment angle represented as a gain-loss for dish-antenna with HPBW ≈ 3°
Y° Y+ 0.00 Y+0.20 Y+ 0.40 Y+ 0.60 Y+ 0.80 Y+ 1.00 Y+1.20 Y+ 1.40 Y+ 1.60 Y+ 1.80 Y+ 2.00 Y+ 2.20
0.00 0.0000 -0.2996 -0.6215 -0.9691 -1.3470 -1.7609 -2.2185 -2.7300 -3.3099 -3.9794 -4.7712 -5.7403
0.01 -0.0145 -0.3152 -0.6382 -0.9872 -1.3668 -1.7827 -2.2427 -2.7572 -3.3411 -4.0157 -4.8149 -5.7949
0.02 -0.0290 -0.3308 -0.6550 -1.0054 -1.3866 -1.8046 -2.2670 -2.7846 -3.3724 -4.0524 -4.8590 -5.8503
0.03 -0.0436 -0.3464 -0.6719 -1.0237 -1.4066 -1.8266 -2.2915 -2.8122 -3.4040 -4.0894 -4.9035 -5.9063
0.04 -0.0583 -0.3621 -0.6888 -1.0421 -1.4267 -1.8487 -2.3161 -2.8400 -3.4358 -4.1266 -4.9485 -5.9631
0.05 -0.0730 -0.3779 -0.7058 -1.0605 -1.4468 -1.8709 -2.3408 -2.8679 -3.4679 -4.1642 -4.9940 -6.0206
0.06 -0.0877 -0.3937 -0.7229 -1.0791 -1.4671 -1.8932 -2.3657 -2.8960 -3.5002 -4.2022 -5.0399 -6.0789
0.07 -0.1025 -0.4096 -0.7400 -1.0977 -1.4874 -1.9156 -2.3908 -2.9243 -3.5327 -4.2404 -5.0864 -6.1380
0.08 -0.1174 -0.4255 -0.7572 -1.1163 -1.5079 -1.9382 -2.4159 -2.9528 -3.5655 -4.2790 -5.1333 -6.1979
0.09 -0.1323 -0.4415 -0.7745 -1.1351 -1.5284 -1.9609 -2.4413 -2.9814 -3.5985 -4.3180 -5.1808 -6.2586
0.10 -0.1472 -0.4576 -0.7918 -1.1539 -1.5490 -1.9837 -2.4667 -3.0103 -3.6318 -4.3573 -5.2288 -6.3202
0.11 -0.1622 -0.4737 -0.8092 -1.1729 -1.5697 -2.0066 -2.4923 -3.0393 -3.6653 -4.3969 -5.2773 -6.3827
0.12 -0.1773 -0.4899 -0.8267 -1.1919 -1.5906 -2.0296 -2.5181 -3.0686 -3.6991 -4.4370 -5.3264 -6.4461
0.13 -0.1924 -0.5061 -0.8442 -1.2110 -1.6115 -2.0528 -2.5440 -3.0980 -3.7332 -4.4774 -5.3760 -6.5105
0.14 -0.2076 -0.5224 -0.8619 -1.2301 -1.6325 -2.0761 -2.5701 -3.1277 -3.7675 -4.5182 -5.4262 -6.5758
0.15 -0.2228 -0.5388 -0.8796 -1.2494 -1.6537 -2.0995 -2.5964 -3.1575 -3.8021 -4.5593 -5.4770 -6.6421
0.16 -0.2380 -0.5552 -0.8973 -1.2687 -1.6749 -2.1230 -2.6228 -3.1876 -3.8370 -4.6009 -5.5284 -6.7094
0.17 -0.2533 -0.5717 -0.9151 -1.2882 -1.6963 -2.1467 -2.6493 -3.2179 -3.8722 -4.6428 -5.5804 -6.7778
0.18 -0.2687 -0.5882 -0.9331 -1.3077 -1.7177 -2.1705 -2.6761 -3.2483 -3.9076 -4.6852 -5.6331 -6.8473
0.19 -0.2841 -0.6048 -0.9510 -1.3273 -1.7393 -2.1944 -2.7030 -3.2790 -3.9434 -4.7280 -5.6864 -6.9179

106
Related Documents











