Anhang A 1 Bücher und Normen A 1.1 Weiterführende Bücher Biezeno, C. B.; Grammel, R.: Technische Dynamik. 2 Bde. Springer-Verlag, Ber- lin, Heidelberg, New York 1971 Brommundt, E.; Sachau, D.: Schwingungslehre mit Maschinendynamik. Teub- ner/GWV Fachverlage, Wiesbaden 2008 Fischer, U.; Stephan, W.: Mechanische Schwingungen. Fachbuchverlag Leipzig 1993 Hagedorn, P.; Hochlenert, D.: Technische Schwingungslehre. Verlag Harri Deutsch, Frankfurt a. M. 2012 Irretier, H.: Grundlagen der Schwingungstechnik. 2 Bde. Vieweg, Braunschweig/ Wiesbaden 2000 bzw. 2001 Klotter, K.: Technische Schwingungslehre Erster Band: Einfache Schwinger Teil A: Lineare Schwingungen. 1988 Teil B: Nichtlineare Schwingungen. 1980 Zweiter Band: Schwinger von mehreren Freiheitsgraden. Nachdruck der 2. Auflage von 1960, Springer-Verlag, Berlin, Heidelberg, New York 1981 Magnus, K.; Popp, K.; Sextro, W.: Schwingungen. Vieweg+Teubner/GWV Fach- verlage, Wiesbaden 2008 Waller, H.; Schmidt, R.: Schwingungslehre für Ingenieure. BI-Wissenschaftsver- lag, Mannheim, Wien, Zürich 1989 Wittenburg, J.: Schwingungslehre: Lineare Schwingungen, Theorie und Anwen- dungen. Springer-Verlag, Berlin, Heidelberg, New York 1996 A 1.2 Ausgewählte Normen DIN 1311 – Schwingungen und schwingungsfähige Systeme, Teil 1 bis Teil 3 2000 bzw. 2002. VDI 3830 – Werkstoff- und Bauteildämpfung. Blatt 1 bis Blatt 5 2004 bzw. 2005. H. Jäger et al., Technische Schwingungslehre, DOI 10.1007/978-3-8348-2099-0, © Springer Fachmedien Wiesbaden 2013

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Anhang
A 1 Bücher und Normen
A 1.1 Weiterführende Bücher
Biezeno, C. B.; Grammel, R.: Technische Dynamik. 2 Bde. Springer-Verlag, Ber-lin, Heidelberg, New York 1971
Brommundt, E.; Sachau, D.: Schwingungslehre mit Maschinendynamik. Teub-ner/GWV Fachverlage, Wiesbaden 2008
Fischer, U.; Stephan, W.: Mechanische Schwingungen. Fachbuchverlag Leipzig 1993
Hagedorn, P.; Hochlenert, D.: Technische Schwingungslehre. Verlag Harri Deutsch, Frankfurt a. M. 2012
Irretier, H.: Grundlagen der Schwingungstechnik. 2 Bde. Vieweg, Braunschweig/ Wiesbaden 2000 bzw. 2001
Klotter, K.: Technische Schwingungslehre Erster Band: Einfache Schwinger Teil A: Lineare Schwingungen. 1988 Teil B: Nichtlineare Schwingungen. 1980 Zweiter Band: Schwinger von mehreren Freiheitsgraden. Nachdruck der 2. Auflage von 1960, Springer-Verlag, Berlin, Heidelberg, New York 1981
Magnus, K.; Popp, K.; Sextro, W.: Schwingungen. Vieweg+Teubner/GWV Fach-verlage, Wiesbaden 2008
Waller, H.; Schmidt, R.: Schwingungslehre für Ingenieure. BI-Wissenschaftsver-lag, Mannheim, Wien, Zürich 1989
Wittenburg, J.: Schwingungslehre: Lineare Schwingungen, Theorie und Anwen-dungen. Springer-Verlag, Berlin, Heidelberg, New York 1996
A 1.2 Ausgewählte Normen
DIN 1311 – Schwingungen und schwingungsfähige Systeme, Teil 1 bis Teil 3 2000 bzw. 2002.
VDI 3830 – Werkstoff- und Bauteildämpfung. Blatt 1 bis Blatt 5 2004 bzw. 2005.
H. Jäger et al., Technische Schwingungslehre,DOI 10.1007/978-3-8348-2099-0, © Springer Fachmedien Wiesbaden 2013
A 2 Lösungen der Aufgaben 213
A 2 Lösungen der Aufgaben
2.1 x = 7,94 cm; 0 = 35,62°
2.2 0 ck sk2 23 ˆ ˆ; 1 cos ; cos4
H Hf H f k f kk k
;
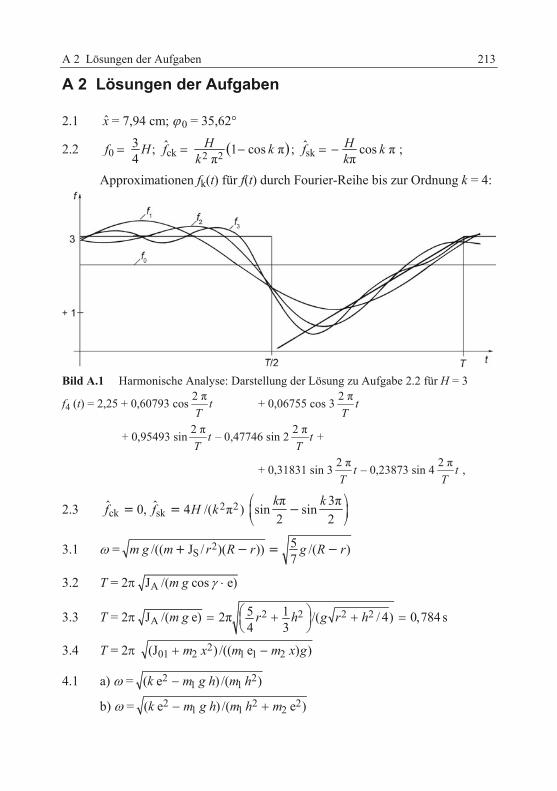
Approximationen fk(t) für f(t) durch Fourier-Reihe bis zur Ordnung k = 4:
Bild A.1 Harmonische Analyse: Darstellung der Lösung zu Aufgabe 2.2 für H = 3
f4 (t) = 2,25 + 0,60793 cos 2 tT
+ 0,06755 cos 3 2 tT
+ 0,95493 sin 2 tT
– 0,47746 sin 2 2 tT
+
+ 0,31831 sin 3 2 tT
– 0,23873 sin 4 2 tT
,
2.3 2 2ck sk3ˆ ˆ0, 4 /( ) sin sin
2 2k k
f f H k
3.1 = 2S5/(( J / )( )) /( )7
m g m r R r g R r
3.2 T = 2 AJ /( cos e)m g
3.3 T = 2 2 2 2 2A5 1J /( e) 2 /( / 4) 0,784 s4 3
m g r h g r h
3.4 T = 2 201 2 1 1 2(J ) /(( e ) )m x m m x g
4.1 a) = 2 21 1( e ) /( )k m g h m h
b) = 2 2 21 1 2( e ) /( e )k m g h m h m

214 Anhang
c) = 2 2 *2 2 21 1 1 2( ) /( )k e m g h m h m h m e FV = m1 r h/e *2 – m2 g
* 2 21 1( ) /( )k e m g h m h
4.2 a) 0/(J )2
d b E l
b) 12 21 2 02/ (4 /( ) ( / ) ) Jb l E d k e e
4.3 Starrachse kges = 2 kr kw /(kr + kw), z = ges12,04/k m
s
Einzelradaufhängung kges = 2 kr kw /2
w rl ek kb e
z ges/ 7,64 1/sk m
4.4 y = m g/k (1 – cos t) mit = /k m ymax = 2 m g/k = 2 FG /k = 2 ystat. Die Federverformung und damit auch
die Beanspruchung der Feder wird bei plötzlicher Belastung doppelt so groß wie bei statischer Belastung (dynamischer Lastfaktor).
4.5 a) T = 2 2 21 2 1 21 /(( / 2 ) )3
m l m x m l m x g
b) FV = k b
1 22 21 2
( / 2 ) (1 /(2 ))1/ 3
m l m x g k bl l bm l m x
4.6 n = 80,4 1/min 4.7 n = 138,3 1/min
4.8 a) kges = 2 113 /( ( )), 768,7 1/ minE I l l l n
b) 1/kges = 2 21 111( ) /(3 ) ( / )l l l E I l lk
n = 526,2 1/min
4.9 a) 2 2Stab Stab1(2 ( / 2 ) ) /3
k e m l ml g m m l

A 2 Lösungen der Aufgaben 215
b) 2 2Stab Stab1(2 ( / 2 ) ) /3
k e m l ml g m m l
c)2 Stab
2Stab
2 ( / 2 ) cos(1/ 3 )
k e m l ml gm m l
4.10 = 2 2 2 2V H 1 21 2 1 2( ) /( )k l k l m e m e
4.11 a)2 21 2
2 2S
/ 2 19,57sJ / 4( )
k b k h m g hm b h
b)2 2S
2 2
J ( ) / 42 2,10 s
/ 2m b h
Tmg b h
4.12 a) T = 2 2 / 1,79 sr g
b) k = m (2 (b)2 r – g)/(2 r) = 18210 N/m
4.13 a) 2 4 2R( /(32 )) /( )k e G d l m e
b) 2 4 2R S( /(32 )) /( J )k e G d l m e
4.14 JS = T2 m g e2/(4 2 l) = 0,647 kg m2
4.15 T = 2 /( )l b e g
4.16 a)2
2 211
3 sin 67,9( / 2 sin ) /(1/12 )s
kk l m lm
b) FV = 3,654 N; von Einfluss, aber sehr gering;
2 2 2V 1 2( ( / 2 sin ) / 2 cos ) /(1/12 / 4)k l F l m l m l = 29,4 1/s
c) 2 2 1 2( sin / 4) /(1/ 3 ) 29, 2 1/sk g d m m ; (ohne FV)
4.17 2 2 21 2( ( / ) cos ) /( )k l l e m g l m l
21 2/ ( / / ) / cosk m l l e l g l
4.18 a) 2D3 5/2 4
k m g l m l

216 Anhang
Stabilitätsbedingung: kD 32
m g l
b) *2 2D( 3 / 2 ) /(5 / 4 )k m r l m l
4.19 a) 2 21 1 1 2 2 2 2F/ , ( ) /( )k m k h m g h m h
b) 22 21 2 2 1 2F( ) /(( ) )k h k h m g h m m h
22 21 2 2 AB 1 2 ABF1( /(( ) )2
k h k h m m g h m m m h
4.20 a) y 3 1 y yers2 / / ; b) /l l k m k m mit
2 42yers 1 3 1 2 21/(( \ ) /(4 ) 8 /( )k l l k l l G d + 64 3 41 1/(3 ))l E d
4.21 a) 12 /k m ;
b) Ohne Federvorspannung: 12 /k m , mit Federvorspannung: Federkraft F2 = FV + F
F2 = FV + k2 2 2( )l x l
= FV +k2 l 2( 1 ( / ) 1)x l
= FV +k2 l2 41 1
1 ... 12 8
x xl l
F2 = FV +k2 l21
2xl
Die weiteren Reihenglieder können vernachlässigt werden, da sie klein von höherer Ordnung sind.
Bild A.2 Zu Aufgabe 4.21 b)
Rückstellkraft aus der zusätzlichen Feder F2x = – F2 sin . Dabei ist
sin =
Klein von höherer Ordnung
2 4
2 2 2
1 1 31 ...2 8
1
x x x x xl l l ll x x
l

A 2 Lösungen der Aufgaben 217
Damit
F2x = –2 2
V 21
12 2l x x x
F kl l l
= – FV
Klein von höherer Ordnung
3 3
2 V1 ...
2 2x l x xk Fl l l
Damit wird die gesamte Rückstellkraft
FR = – 2 k1 x – FV
V1
1 V
2(2 / ) und .
Fkx lk F l x
l m
c) Mit d’Alembert: Trägheitskräfte
Fliehkraft *2F coseF m
Trägheitskraft aus Coriolisbeschleunigung
FC = m 2 * x ( zur Führung)
Bild A.3 Zu Aufgabe 4.21 c)
Nach Newton
ix 1 V F2 sinxF k x F F m xl
oder
– 2 k1 x – FV *2tan mit tanx x
m e m xl e
erhält man V *212 Fk m x m xl
, daraus liest man ab
1 V *22 /k F lm
.
5.1 a) Vier Federn parallelgeschaltet; ky = 2 kR + 2 kW; m = 2 m1 + m2; ohne Dämpfung 0y = y/k m = 103,9 1/s; mit Dämpfung = 2 d/(2 m) = 56 1/s < 0y, schwache Dämpfung. dy = 2 2
0y = 87,5 1/s.

218 Anhang
b) 2 2 2D i G R W Fi cos 2 ( / 2) 2 ( /2)k k r F e k l k e
JO = 2 m1 (l/2)2 + 1/12 m2 l2, ohne Dämpfung 0 = D
OJk = 117,9 1/s,
mit Dämpfung = 2 d 2dr /(2 JO) = 46,0 1/s,
2 2d 0 108,51/s.
5.2 a) fx = 1/(2 3x ges ges 1 ges/ 1/(2 ) 48 /( ) 5,97 Hzk m E I h m
b) fy = 1/(2 ges4 /( ) 67,52 HzE A h m
c) fdy = 0,98 fy = fy 2 21 , 1 0,98 0,199
5.3 a) 0 = 13,53 1/s, b) d = JO / 2dr 0 = 3974,4 kg/s,
= 0 t e– t = 3,0113,53s m
1 , 1/ 0,074 ss
tt e t
max = 0,0816 = 4,67°
c) k > m g e/(2 r2) = 4179 N/m
5.4 a) 2 2 20 R W F S( ( sin ) ) /(J )k l k e m e
b) d < 2/(eF sin )2 2 2 2R W F S( ( sin ) ) (J )k l k e m e
2 2d 0
5.5 a) Td = 0,345 s, d = 18,22 1/s
b) = 0,124 1/s, = 0,0068
c) k = 1,778 · 106 N/m
d) x = 1,8 cm1
0,124s
1 1cos 18,22 0,0068 sin 18,22
s st
e t t
5.6 a) i0 2 22 2
i i a i R a i
2( ) ( ) ( )
r h E b hr r r r r r b r r
b) = 1/20 ln 3 = 0,055

A 2 Lösungen der Aufgaben 219
5.7 a) R W0y yers yers 2W R R W
2/ ,( / )
k kk m kk k l l
b1) 2 20D Ders A Ders W RW R/J , 2( )k k k l k l
JA = 2 2 2 2 21 2 Feder RadR W R21 1 13 2 3
m l m l m l m l
b2) 2 2 2 2dD D W R AoD D W Rmit ( )/Jd l d l
Bei blockierten Rädern vergrößert sich die Drehmasse. JAbl = JA + 2 JERad
5.8 a) 20y ges ges Seil D Seil D/ , /( )k m k E A k E A r k l
y = 0/ 0y sin 0y t , 0 g/ 0y
b) 2 2dy 0 dy dy0y ( /(2 )) , / sintd m y e t
0 darf größer werden.
5.9 a) 20y m m/(8 ) 3 /( ( )) 363,2 1/sd l E m l l
b) = 0,0277: = 1,60 1/s, dy = 363,2 1/s,
c) 2 2 2m m m m
yers 4A B
1 1 64 ( )1/3
l l l l l lkk l k l E d
0y = yers /k m
6.1 a) 0y = 21,95 1/s, b) 0y = 27,05 1/s, Fv ist ohne Einfluss auf die Fre-quenz, wenn sie so groß ist, dass alle Federn stets „im Eingriff“ sind.
c) y = – 0,00773 m, kv | y | = 1159,5 N < Fv, Vorspannkraft reicht aus.
6.2 a) (1)0 81,0 1/s,
b) (2) (1)0 02 114,61/s
c) d 108,31/s,
d) ˆ 0,1037 rad, Fmax = 59,7 N, Vorspannkraft reicht aus.
6.3 a) k = 16151 kg/s2, Fmin = – 49,58 N,
b) JS = 0,761 kgm2

220 Anhang
6.4 a) 0D = 97,6 1/s
b) ˆ = – 1,607 rad, = 100 1/s,
Mmax = 1,025 · 105 Nm, 0D vermindern durch weichere Lagerung: z. B. d1 verkleinern, oder l1, l2 erhöhen.
6.5 a) 0x 12 /k m
b) 20x 1 Feder S22 /( 2( /3 J / ))k m m r
c) 1 Feder 1 Feder2 2( ) / , mit
3kx x m m g m m m m
m,
x = μ (m1 + mFeder) g/(2 k) (1 – cos 0x t), Sprungantwort,
* max 1 Feder/ ( ) /( 2 )x r m m g r m k
6.6 a) 2 20 R W R W S m2 /(( )(J ))k k l k k m l
b) 2ges R W S m R W0,594 2 (J ) / ( )d k k m l k k
l
c) krit = b 0/(2 )
6.7 a)2
22 2 20 1 a 2 ai/ ( / 2) ( ) /122l
k R m r r m l r ,
Beschränkung auf kleine Schwingungen ist nicht notwendig.
b)2
20 2 a3 / 2 /N, N wie bei a)2l
k R m g r
c) 2 2O 0ˆˆ ( /J ) /( ) .M
6.8 a) f0y = 1,82 Hz b) y = 0,0147 mm
6.9 a) f0 = 51,1 Hz b) y = 0,207 cm c) d = 315,2 1/s
6.10 a) f0 = 5,02 Hz b) F = 53,9 N, y = – 1,226 cm
überkritisch erregt, amax = 2 2max ˆ| | 13,76 m/sy y
6.11 a) kB=Ebh3/(4l3) b) 1=0,035 rad 4ˆ =0,042 rad c) ungedämpft: 1=0,035 rad ; 4ˆ =0,125 rad

A 2 Lösungen der Aufgaben 221
Q =k u =k u (a+l) , i = 1,2;i B Bi B i i2 2ˆ ˆQ = Q +Q / 2=144,7 Neff 1 2
7.1 a) 0z = 2 2a i( ) /( )E d d hm ,
0x = 4 40y a i1 3 ( ) /( )
4E d d hm
h,
0Dz = 4 4 2 2a Sz1 2i1 3 ( )( ) /( J )
4E d d l l h
h,
b) x = 1,581 2 2x dDz Dz0Dzkg1, 3,162 ,
s sd m
mit Dz = dx 2 2 Sz1 2( ) /(2 J )l l
c) 2 2 2 2 2 2x0xˆ / ( ) 4mx am
x = arctan (2 x /( 2 20x ))
7.2 a) JAB = 12,96 kgm2 b) kDges = 0,45904 · 106 Nm
c) 0D = 188,2 1s
d) = 2,076 1s
e) dD = 188,19 1s
f) Amplitude ˆ = 0,1002 rad, Phasenverschiebg. = 84,5°
7.3 a) 20z 1 2(2 sin ) /k k m ,
dz = 2 2 21 2 1 2(2 sin ) / ((2 sin ) /(2 ))k k m d d m
b) 0Dx = l sin 1 Sx2 / Jk ,
dDx = 2 2 2 2 21 Sx 1 Sx2 sin / J ( sin / J )k l d l c) = ˆ sin ( )t ,
2 2 2 2 2 20 D Sx 1ˆ / ( J ) (2 sin )M k d l , tan = 2 d1 l2 sin2 / (kD – JSx 2)
7.4 a) 0y = 30,8 1s
b) y = – 0,437 m;
c) – 33 983 N Fu 32 413 N, m2 3304 kg vergrößern, 2. k kleiner wählen.
d) x = 0,041 m, = 95,4°
7.5 a) = 51,34° b) F = 7,68 N
222 Anhang
7.6 a) k = 19 341 kg/s2 b) = 0,04621, = 0,3851 1/s, d = 46,209 kg/s, x = 3,306 cm, = /2 = 90°
8.1 1 = 6,37 1/s, 2 = 33,31 1/s
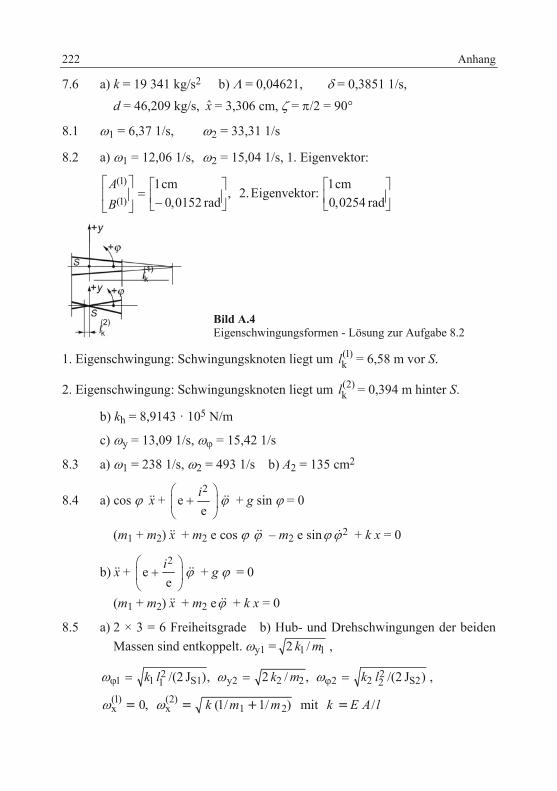
8.2 a) 1 = 12,06 1/s, 2 = 15,04 1/s, 1. Eigenvektor:
(1)
(1)1cm 1cm
, 2.Eigenvektor:0,0152 rad 0,0254 rad
AB
Bild A.4 Eigenschwingungsformen - Lösung zur Aufgabe 8.2
1. Eigenschwingung: Schwingungsknoten liegt um (1)kl = 6,58 m vor S.
2. Eigenschwingung: Schwingungsknoten liegt um (2)kl = 0,394 m hinter S.
b) kh = 8,9143 · 105 N/m
c) y = 13,09 1/s, = 15,42 1/s
8.3 a) 1 = 238 1/s, 2 = 493 1/s b) A2 = 135 cm2
8.4 a) cos x + 2
eei + g sin = 0
(m1 + m2) x + m2 e cos – m2 e sin 2 + k x = 0
b) x + 2
eei + g = 0
(m1 + m2) x + m2 e + k x = 0
8.5 a) 2 × 3 = 6 Freiheitsgrade b) Hub- und Drehschwingungen der beiden Massen sind entkoppelt. y1 = 1 12 /k m ,
2 21 1 S1 y2 2 2 2 2 S21 2/(2 J ), 2 / , /(2 J )k l k m k l ,
(1) (2)x x 1 20, (1/ 1/ ) mit /k m m k E A l
A 2 Lösungen der Aufgaben 223
c) Nur die Schwingungen in x-Richtung werden beeinflusst.
2 23 1 21 2( ) / , / ,v k k m v k m
die beiden Eigenkreisfrequenzen (1) (2)x x, berechnen sich nach (8.6), wo-
bei dort k2 durch k zu ersetzen ist. d) Stab BD an einer der Massen in x-Richtung verschieblich lagern.
8.6 a) 3; b) Translationsschwingung in horizontaler und vertikaler Richtung, Drehschwingung um Achse durch S.
c) 3 30x 0y/( ), ( /(2 ) ) / ,E b h l m E b h l k m
3 2 3 2 20 dx 0x3 /(2 ( )) d)E b h L l m L H ,
2 2d 0 dy 0y, ( /(2 ))d m
8.7 a) 3; b) Translationsschwingung in x-Richtung, y-Richtung, Dreh-schwingung um S. c) 0x 22 /k m ,
0y 1 v 2 0 v 2 dx 0x( 2 / ) / , 6 /( ) d) ,k F l m F l m
2 2dy d 00y ( /(2 )) ,d m
8.8 a) 3; Translationsschwingung in x-Richtung,
0x 2 e /(( ) )E h l b m ; Translationsschwingung in y-Richtung,
3 30y 4 e / (( ) ); Drehschwingung um ,E h l b m S
0 F F F S/(2 ) 2 e ( / 2 ) (2 / ) / Jh l E h b l b l
b) 2 2 2 2 2 2dx dy0x 0y( / cos ) , ( / sin ) ,d m d m
2 2 2 2d S0 ( sin /(4 J ))d b
c) y = – 0/ dy e– y t sin dy t
8.9 a) 311n = 8L / 486EI , 322n = 8L / 486EI ; 312 21n = n = 7L / 486EI
b) 3 8 7L / 486EI
7 8N = ; 3 8 –7
= 32.4EI/L–7 8
K
224 Anhang
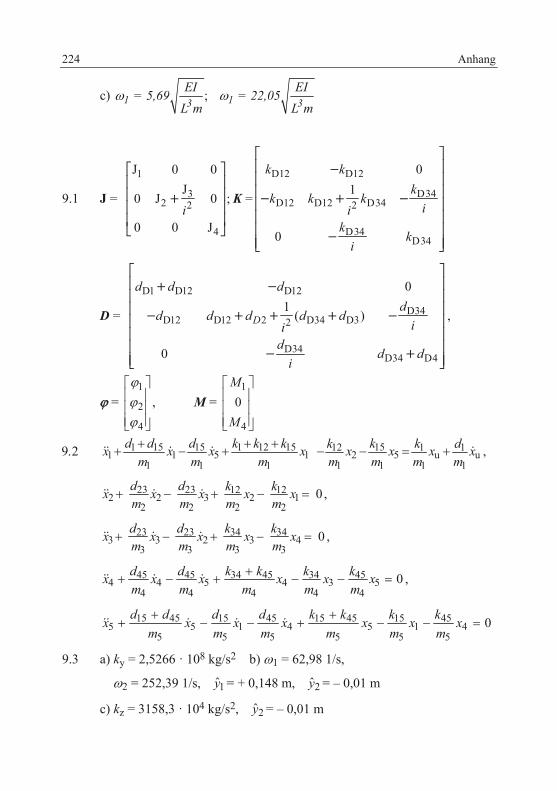
c) ;1 13 3EI EI = 5,69 = 22,05
L m L m
9.1 J =
1
32 2
4
J 0 0J
0 J 0 ;
0 0 Ji
K =
D12 D12
D34D12 D12 D342
D34D34
01
0
k kk
k k kii
kk
i
D =
D1 D12 D12
D34D12 D12 2 D34 D32
D34D34 D4
01
( )
0
D
d d dd
d d d d dii
dd d
i
,
= 1
2
4
, M = 1
4
0M
M
1 15 15 1 12 151 1 5 1
1 1 1
d d d k k kx x x xm m m
1512 1 12 5 u u
1 1 1 1
kk k dx x x xm m m m
23 23 12 122 2 3 2 1
2 2 2 20d d k kx x x x x
m m m m
23 23 34 343 3 2 3 4
3 3 3 30d d k kx x x x x
m m m m
45 45 34 45 34 454 4 5 4 3 5
4 4 4 4 40d d k k k kx x x x x x
m m m m m
15 45 15 45 15 45 15 455 5 1 4 5 1 4
5 5 5 5 5 50d d d d k k k kx x x x x x x
m m m m m m
9.3 a) ky = 2,5266 · 108 kg/s2 b) 1 = 62,98 1/s,
2 = 252,39 1/s, 1y = + 0,148 m, 2y = – 0,01 m
c) kz = 3158,3 · 104 kg/s2, 2y = – 0,01 m

A 2 Lösungen der Aufgaben 225
9.4 e) 42 2 232 J /( )d l G
9.5 a) 1 = 0, 2 = 61,8 1/s b) M = 2,57 · 103 Nm
9.6 a) 2, ja, y = 44,7 1/s, = 78,8 1/s b) y = – 1,51 cm,
ˆ = 0,00024 rad, FAdyn = 146,7 kN c) 1 = 38,8 1/s, 2 = 74,3 1/s
9.7 a) 1 = 0; 2 = 2 e 1 2(1/ J 1/ J )k ; b) = 1 – 2
= 2 21 1 2ˆ /( ( ))M J sin t + C1 cos 2 t + C2 sin 2 t
c) 2 2d 2 mit = 2 d e2 (1/J1 + 1/J2),
= ˆ sin ( t – ) mit ˆ = 1M /J1/ 2 22( ) 4
= arctan (2 / ( ) )
10.1 cos cosh = 1, 1 = 4,73, 2 = 7,85, 3 = 10,996, i = 2 2
i / /l EI
10.2 cos cosh + 1 = 0, 1 =2
+ 0,30431 = 1,8751,
2 = 32
– 0,01830 = 4,6941, 3 = 5 0,00078 7,85482
,
n (2 n – 1)2
10.3 cos cosh = 1,
1 = 32
+ 0,01765 = 4,73004, 2 = 52
– 0,00078 = 7,85320,
3 = 72
+ 0,00003 = 10,99561, … , n (2 n + 1)2
,
1 = 434 1/s, 2 = 1196 1/s
10.4 a) w (0, t) = w (l, t) = 0, w' (0, t) = 0, w" (l, t) = 0 b) tan = tanh c) 1 = 3,9266 d) 1 = 545 1/s
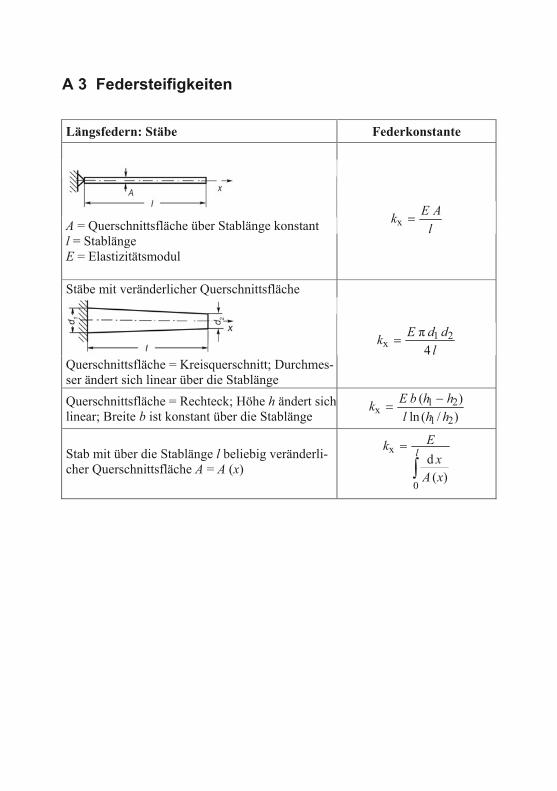
A 3 Federsteifigkeiten
Längsfedern: Stäbe Federkonstante
A = Querschnittsfläche über Stablänge konstant l = Stablänge E = Elastizitätsmodul
xE Ak
l
Stäbe mit veränderlicher Querschnittsfläche
Querschnittsfläche = Kreisquerschnitt; Durchmes-ser ändert sich linear über die Stablänge
1 2x 4
E d dkl
Querschnittsfläche = Rechteck; Höhe h ändert sich linear; Breite b ist konstant über die Stablänge
1 2x
1 2
( )ln ( / )
E b h hkl h h
Stab mit über die Stablänge l beliebig veränderli-cher Querschnittsfläche A = A (x)
x
0
d( )
lEk
xA x
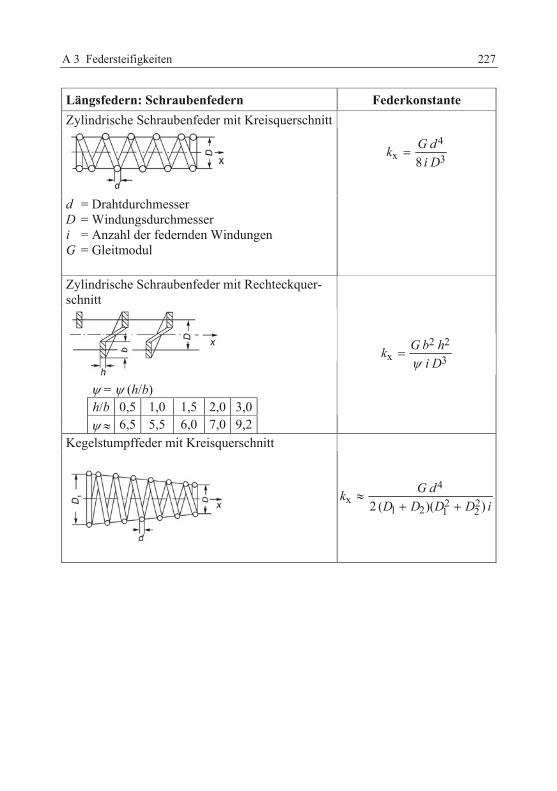
A 3 Federsteifigkeiten 227
Längsfedern: Schraubenfedern Federkonstante Zylindrische Schraubenfeder mit Kreisquerschnitt
4x 38
G dki D
d = Drahtdurchmesser D = Windungsdurchmesser i = Anzahl der federnden Windungen G = Gleitmodul
Zylindrische Schraubenfeder mit Rechteckquer-schnitt
= (h/b) h/b 0,5 1,0 1,5 2,0 3,0 6,5 5,5 6,0 7,0 9,2
2 2x 3
G b hki D
Kegelstumpffeder mit Kreisquerschnitt
4x 2 21 2 1 22 ( )( )
G dkD D D D i
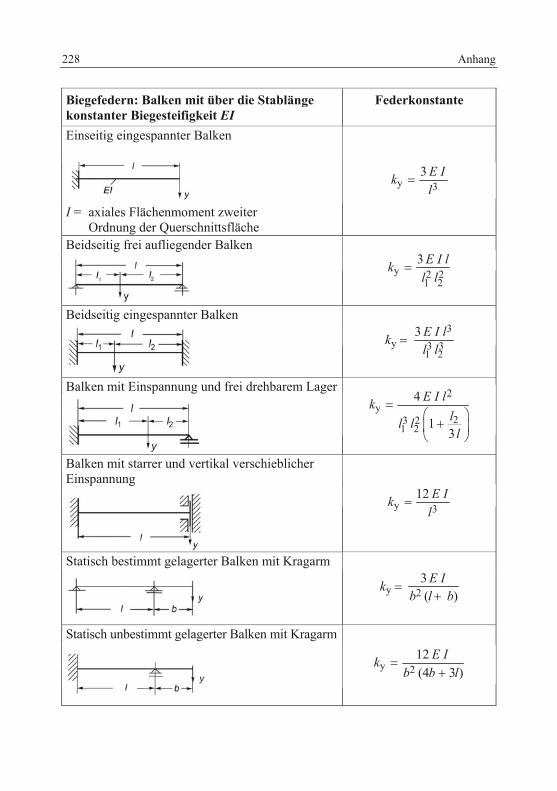
228 Anhang
Biegefedern: Balken mit über die Stablänge konstanter Biegesteifigkeit EI
Federkonstante
Einseitig eingespannter Balken
I = axiales Flächenmoment zweiter
Ordnung der Querschnittsfläche
y 33 E Ik
l
Beidseitig frei aufliegender Balken
y 2 21 2
3 E I lkl l
Beidseitig eingespannter Balken
3y 3 3
1 2
3 E I lkl l
Balken mit Einspannung und frei drehbarem Lager
2y
23 21 2
4
13
E I lkll ll
Balken mit starrer und vertikal verschieblicher Einspannung
y 312 E Ik
l
Statisch bestimmt gelagerter Balken mit Kragarm
y 23( )E Ik
b l b
Statisch unbestimmt gelagerter Balken mit Kragarm
y 212(4 3 )
E Ikb b l
A 3 Federsteifigkeiten 229
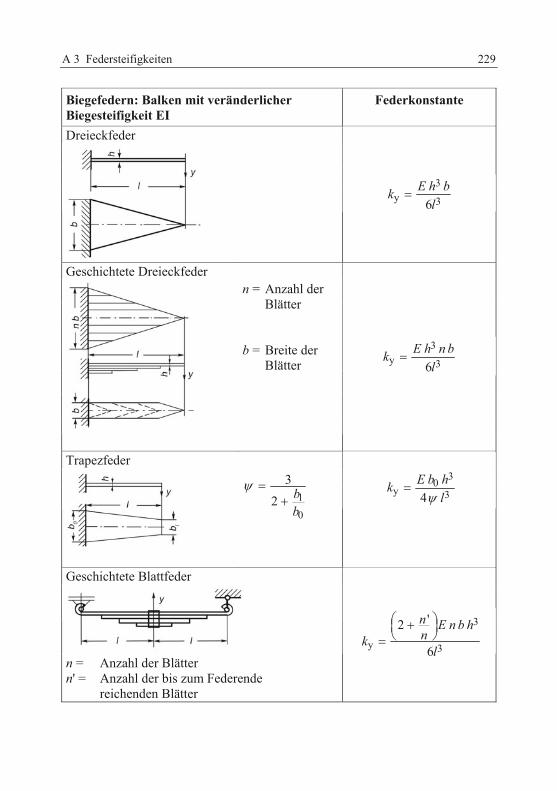
Biegefedern: Balken mit veränderlicher Biegesteifigkeit EI
Federkonstante
Dreieckfeder
3y 36
E h bkl
Geschichtete Dreieckfeder
n = Anzahl der Blätter
b = Breite der
Blätter 3
y 36E h n bk
l
Trapezfeder
1
0
32 b
b
30
y 34E b hk
l
Geschichtete Blattfeder
n = Anzahl der Blätter n' = Anzahl der bis zum Federende
reichenden Blätter
3
y 3
'2
6
n E n b hnk
l
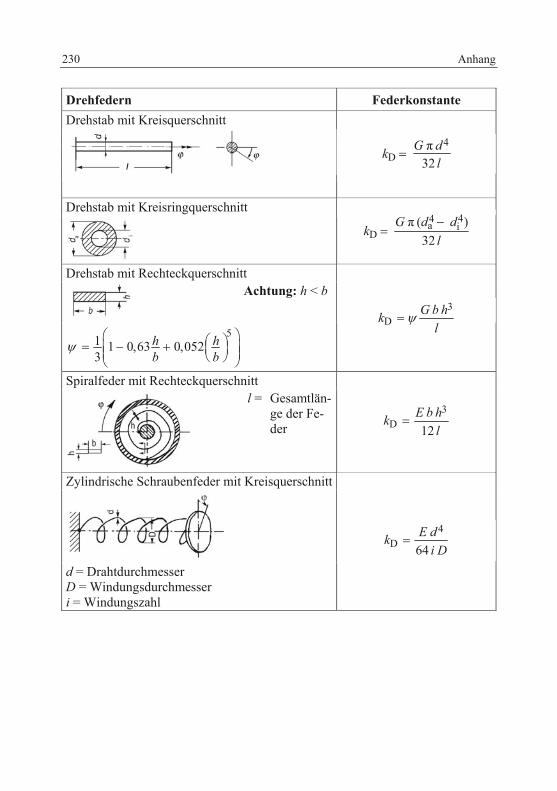
230 Anhang
Drehfedern Federkonstante Drehstab mit Kreisquerschnitt
4D 32
G dkl
Drehstab mit Kreisringquerschnitt
44a iD
( )32
G d dk
l
Drehstab mit Rechteckquerschnitt
Achtung: h < b
51 1 0,63 0,0523
h hb b
3D
G b hkl
Spiralfeder mit Rechteckquerschnitt
l = Gesamtlän-ge der Fe-der
3D 12
E b hkl
Zylindrische Schraubenfeder mit Kreisquerschnitt
d = Drahtdurchmesser D = Windungsdurchmesser i = Windungszahl
4D 64
E dki D
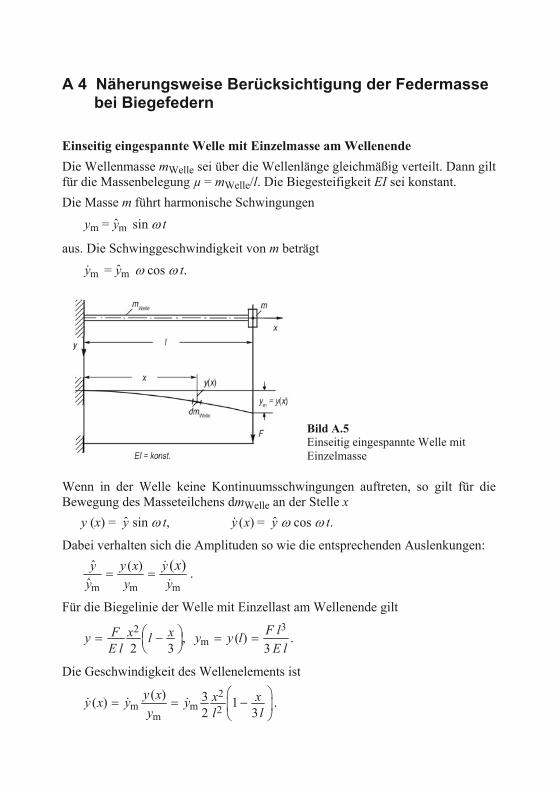
A 4 Näherungsweise Berücksichtigung der Federmasse bei Biegefedern
Einseitig eingespannte Welle mit Einzelmasse am Wellenende Die Wellenmasse mWelle sei über die Wellenlänge gleichmäßig verteilt. Dann gilt für die Massenbelegung μ = mWelle/l. Die Biegesteifigkeit EI sei konstant. Die Masse m führt harmonische Schwingungen
ym = my sin t
aus. Die Schwinggeschwindigkeit von m beträgt
my = my cos t.
Bild A.5 Einseitig eingespannte Welle mit Einzelmasse
Wenn in der Welle keine Kontinuumsschwingungen auftreten, so gilt für die Bewegung des Masseteilchens dmWelle an der Stelle x
y (x) = y sin t, ( )y x = y cos t.
Dabei verhalten sich die Amplituden so wie die entsprechenden Auslenkungen:
m m m
ˆ ( )ˆ
( )yy xyy y y
x .
Für die Biegelinie der Welle mit Einzellast am Wellenende gilt 32
m, ( ) .2 3 3
F lF x xy l y y lE l E l
Die Geschwindigkeit des Wellenelements ist 2
m m 2m
( ) 3( ) 12 3
y x x xy x y yy l l
.

232 Anhang
Für seine kinetische Energie ergibt sich
dEkin Welle = 12
dmWelle 2( )y x
=4 22Welle m 4 2
1 9 2d 12 4 3 9
x x xm yl l l
.
Die gesamte in der Welle enthaltene kinetische Energie erhält man durch Integ-ration über die Wellenlänge:
4 5 6kin Welle m 4 5 6
0
9 2 d8 3 9
lx x xE y xl l l
.
Dabei wird dmWelle = μ dx gesetzt. Die Auswertung des Integrals liefert
Ekin Welle = 1 332 140
mWelle 2my .
Aus der Gesamtenergie für das System
Eges = 2 2 2y m m Welle m1 1 1 332 2 2 140
c y m y m y
= 2 2y m Welle m1 1 32 2 140
c y m m y
im Vergleich zu der Gesamtenergie eines Feder-Masse-Systems
2 2ges y m m1 12 2
E c y m y
kann die Ersatzmasse
ers Welle33
140m m m
ermittelt werden. Beidseitig frei aufliegende Welle mit Einzelmasse in Wellenmitte Es sind die gleichen Überlegungen wie oben beim einseitig eingespannten Träger anzustellen. Für die linke Wellenhälfte, Bereich 0 x 2
l , lautet die Gleichung der Biegelinie
33
34 .
16 3F l x xy
E I l l
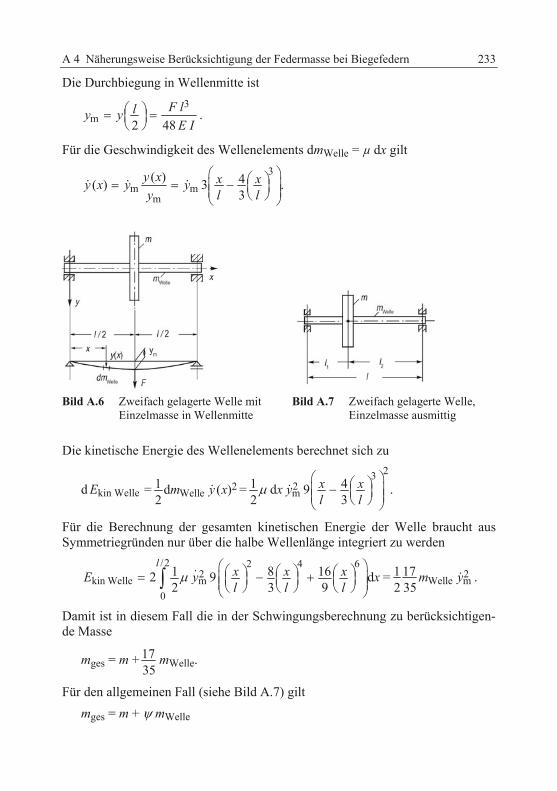
A 4 Näherungsweise Berücksichtigung der Federmasse bei Biegefedern 233
Die Durchbiegung in Wellenmitte ist 3
m 2 48F lly y
E I.
Für die Geschwindigkeit des Wellenelements dmWelle = μ dx gilt 3
m mm
( ) 4( ) 3 .3
y x x xy x y yy l l
Bild A.6 Zweifach gelagerte Welle mit
Einzelmasse in Wellenmitte Bild A.7 Zweifach gelagerte Welle,
Einzelmasse ausmittig Die kinetische Energie des Wellenelements berechnet sich zu
d Ekin Welle = 2Welle1 d ( )2
m y x =23
2m1 4d 9 .2 3
x xx yl l
Für die Berechnung der gesamten kinetischen Energie der Welle braucht aus Symmetriegründen nur über die halbe Wellenlänge integriert zu werden
/2 2 4 62kin Welle m
0
1 8 162 9 d2 3 9
lx x xE y xl l l
= 2Welle m1 172 35
m y .
Damit ist in diesem Fall die in der Schwingungsberechnung zu berücksichtigen-de Masse
mges = m + 1735
mWelle.
Für den allgemeinen Fall (siehe Bild A.7) gilt mges = m + mWelle

234 Anhang
mit
22 2 2 43 2 2 1 1
1 2 2
1 1 2 11 14 3 5 7
l l l lll l l l l l l
+22 2 2 4
1 1 2 2
1
1 1 2 11 13 5 7
l l l ll l l l l
.
Anmerkung: Für l1 0 geht . Vernünftige Resultate liefert die Beziehung etwa im Bereich
3l l1 2
3l .
A 5 Sachverzeichnis
Abklingkonstante 87, 92, 105, 145 Amplitude 3, 8 ff., 13, 30, 89, 162, 169
-, der erzwungenen Schwingung, 116, 145, 152, 186, 191
Amplituden-Frequenzgang 117, 139 ff., 187
Analyse, harmonische 13 f. Balkenschwingungen 45 ff., 204 ff. Bewegung, aperiodische 94 ff.
-, harmonische 7 ff., 23 f. Biegeschwingungen 45 ff., 62, 174 ff.,
206 ff., 231 ff. Bifilaraufhängung 57 ff. Blattfeder 70 charakteristische Gleichung 87, 94 f. Dämpferkonstante 86, 98, 102, 145 Dämpfung 85 ff.
-, Coulomb’sche 104 ff. -, geschwindigkeitsproportionale
86 ff., 138 ff., 184, 188 f. -, schwache 88 ff. -, sehr starke 93 ff. -, starke 88, 92
Dämpfungsgrad 88 ff., 97, 141, 145 Dämpfungskoeffizient 86 Dämpfungskonstante 86 Dämpfungsmatrix 190 Dämpfungswinkel 88, 92 Dekrement, logarithmisches 91 f.,150 Doppelpendel 4 Drehfederkonstante 48 ff., 54 ff., 102,
148 f. Drehmassenmatrix 167, 192 Drehschwingungen, 48 ff., 124
-, gedämpfte 101 ff., 146 ff. -, gekoppelte 166 ff., 191 -, nichtlineare 54
Drehsteifigkeitsmatrix 167, 192 Drehzahl, kritische 126 f. Eigenfrequenz 28 Eigenkreisfrequenz 28, 31, 49, 55 f.,
87 f., 161 f., 186 ff., 199 ff. Eigenschwingung 27, 90, 159, 208 Eigenschwingungsdauer 28 Eigenschwingungsform 162, 164 f., 177 Eigenvektor 166 Eigenwerte 87, 94 Eigenwertgleichung 161, 203, 210 Einflusszahlen 175, 183 Erregerfrequenz 117, 141, 144, 186,
190 Erregerkraft, beliebige 113 f.
-, harmonische 115 ff., 138 ff. -, periodische 120 f.
Ersatzfederkonstante 47, 59 ff. Ersatzmasse 32 f., 59, 232 Ersatzsteifigkeit 31, 33 Fadenpendel 3, 16 f., 19 Feder, lineare 27
-, progressive 67, 72, 148 Federkoeffizient 27 (siehe Federstei-
figkeit) Federkonstante 27 (siehe Federsteifig-
keit) Federkopplung 159, 165, 171 ff., 178 Federmasse 31, 231 ff. Federsteifigkeit 27, 59 ff., 62, 227 ff. Federvorspannkraft 28, 39, 52 ff., 75 Fliehkraftpendel 43, 82 Fourier-Analyse 13 f. Fourier-Reihe 13 f. Freiheitsgrad 3 f. Frequenz 8 Frequenzgang 138 ff. Frequenzgangmatrix 191
236 Anhang
Frequenzgleichung 161, 165, 167, 169 Funktion -, harmonische 6 ff.
-, periodische 6 Fußpunkterregung 127, 151 ff. Grenzfall, aperiodischer 95 Grundschwingungen 13, 178, 199 harmonische Analyse 13 f. Hintereinanderschaltung von Federn,
59 Körperpendel 18 ff. Kontinuumsschwingungen 199 ff. Koppelkreisfrequenz 160 Koppelschwingungen 159 ff. Kreisfrequenz 8 Längsschwingungen 5, 27, 86, 160,
204 Längssteifigkeit 30 Longitudinalschwingungen 5, 204 Luftfeder 68 ff. Massenkopplung 165, 171 ff. Massenmatrix 164, 172, 189 ff. Massenträgheitsmoment 18 f., 48 ff. Nachgiebigkeitsmatrix 174 ff. Nullphasenwinkel 10 f, 13 Oberschwingungen 13 Oltersdorfsche Federaufhängung 71 Ortskurve des Frequenzgangs 141, 143 Parallelschaltung von Federn 59 Pendel, Doppel- 4
-, Faden- 3, 16 f., 19 -, Fliehkraft- 42, 81 -, Körper- 18 ff. -, mathematisches 17 f.
-, nichtlineares 17 f. -, physikalisches 18 ff. -, Zykloiden- 23 f.
Pendellänge, reduzierte 19 f. Pendelschwingungen 4, 16 ff. Periode 6, 8 Periodendauer 6 Phasen-Frequenzgang 140 ff. Phasenverschiebung 154 ff. Phasenwinkel 8, 139 Quasi-Periodendauer 90 Querschwingungen 5, 45 ff., 199 ff. Randbedingung 203 Reibschwinger 40 Resonanz 117 ff., 121 f., 144, 186 Resonanzfrequenz 144 Rollpendel 21 ff., 25 Rollschwinger 33 Rückstellkraft 16, 29 Rückstellmoment 18, 49, 55 Saitenschwingung 199 Schwinger, einfacher 27 ff., 86
-, linearer 5, 27 ff. -, nichtlinearer 5, 39, 54
Schwingerkette 4, 159 ff., 164 Schwingungen, angefachte 3
-, Eigen- 27 -, erzwungene 2, 113 ff., 137 ff.,
184 ff., 188 ff. -, freie 2, 27 ff., 85 ff., 163 -, fußpunkterregte 127, 151 ff., 194 -, gedämpfte 3, 85 ff., 137 ff., 188 ff. -, harmonische 7 ff. -, nichtlineare 5, 17 f., 39, 54 -, parametererregte 3 -, periodische 13 f. -, selbsterregte 3 -, ungedämpfte 3, 27 ff., 114 ff.,
160 ff., 184 ff.
A 5 Sachverzeichnis 237
Schwingungsdauer 6, 8, 17, 20, 24 Schwingungsknoten 52 Schwingungstilger 2, 44, 187, 198 Schwingungszahl 8, 47 f. Schwingungszustand, stationärer 116,
127 f., 138 Schwingweite 3, 28 Seilkurve 199 ff. Selbstzentrierung 126 Spektrum 13 f. Stabilität 37 stationärer Schwingungszustand 116,
127 f., 138 Steifigkeitsmatrix 164 ff., 189 ff. Torsionsschwingungen 5, 49, 210 Torsionsschwingungstilger 198
Trägheitsradius 20 Transversalschwingungen 5, 206 Trifilaraufhängung 80 Unwucht, Schwingungserregung
durch 121 ff., 145 f., 186 f. Vergrößerungsfunktion 141 ff.,
153 Verstimmung 121 Winkelgeschwindigkeit, kritische
127 Zeigerdarstellung 10 ff., 139 Zustandsgrößen 6 Zykloidenpendel 23 f.
Related Documents











