Unmanned Aerial Vehicles (UAV) CHAPTER 1 INTRODUCTION 1.1 Unmanned Aerial Vehicle (UAV) An unmanned aerial vehicle (UAV), commonly known as a drone is an aircraft without a human pilot on board. Its flight is either controlled autonomously by computers in the vehicle, or under the remote control of a pilot on the ground or in another vehicle The acronym UAV has been expanded in some cases to UAVS (Unmanned Aircraft Vehicle System). The FAA ( Federal Aviation Administration) has adopted the acronym UAS (Unmanned Aircraft System) to reflect the fact that these complex systems include ground stations and other elements besides the actual air vehicles. The term UAS, however, is not widely used as the term UAV has become part of the modern lexicon. There are a wide variety of drone shapes, sizes, configurations, and characteristics. Historically, UAVs were simple remotely piloted aircraft, but autonomous control is increasingly being employed. They are predominantly deployed for military applications, but also used in a small but growing number of civil applications, such as policing, fire fighting, and non-military security work, such as surveillance of Dept of ECE, KLECET, Chikodi 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Unmanned Aerial Vehicles (UAV)
CHAPTER 1
INTRODUCTION
1.1 Unmanned Aerial Vehicle (UAV)
An unmanned aerial vehicle (UAV), commonly known as a drone is an aircraft without a
human pilot on board. Its flight is either controlled autonomously by computers in the vehicle, or
under the remote control of a pilot on the ground or in another vehicle
The acronym UAV has been expanded in some cases to UAVS (Unmanned Aircraft
Vehicle System). The FAA (Federal Aviation Administration) has adopted the acronym UAS
(Unmanned Aircraft System) to reflect the fact that these complex systems include ground
stations and other elements besides the actual air vehicles. The term UAS, however, is not widely
used as the term UAV has become part of the modern lexicon.
There are a wide variety of drone shapes, sizes, configurations, and characteristics.
Historically, UAVs were simple remotely piloted aircraft, but autonomous control is increasingly
being employed. They are predominantly deployed for military applications, but also used in a
small but growing number of civil applications, such as policing, fire fighting, and non-military
security work, such as surveillance of pipelines. UAVs are often preferred for missions that are
too "dull, dirty, or dangerous" for manned aircraft.
1.2 HISTORY
The history of the unmanned aerial vehicles begins in the 19th century:
1.2.1 The Austrian Balloons
The earliest recorded use of an unmanned aerial vehicle for war-fighting occurred on
August 22, 1849, when the Austrians attacked the Italian city of Venice with unmanned balloons
loaded with explosives. The balloons were launched from the Austrian ship Vulcano. Although
some of the balloons worked as intended, others were caught in a change of wind and blown back
over Austrian lines. Hence this turned out to be a double edged sword for the Austrians.
Dept of ECE, KLECET, Chikodi 1

Unmanned Aerial Vehicles (UAV)
Fig: 1.1 the Austrian Balloons
1.2.2 World War I
The first pilotless aircraft were built during and shortly after World War I. Leading the way,
using A. M. Low's radio control techniques, was the "Aerial Target" of 1916. Soon after, on
September 12, the Hewitt-Sperry Automatic Airplane, otherwise known as the "flying bomb"
made its first flight, demonstrating the concept of an unmanned aircraft. They were intended for
use as "aerial torpedoes" an early version of today's cruise missiles. Control was achieved
using gyroscopes developed by Elmer Sperry of the Sperry Gyroscope Company.
Fig: 1.2 worlds first UAV 1916
Dept of ECE, KLECET, Chikodi 2

Unmanned Aerial Vehicles (UAV)
1.2.3 World War II
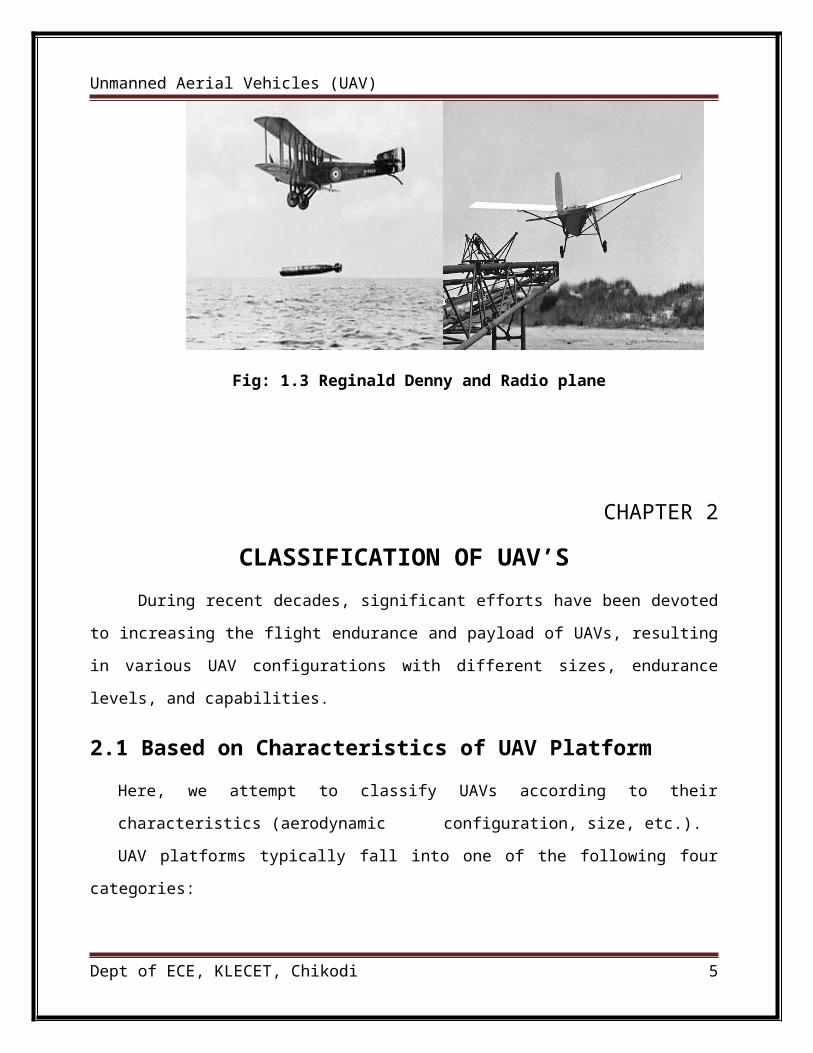
1.2.3.1 Reginald Denny and the Radioplane
The first large-scale production, purpose-built drone was the product of Reginald Denny.
Denny believed that low-cost RC aircraft would be very useful and he demonstrated a prototype
target drone, the RP-1, to the US Army. Denny then bought a design from Walter Righter in 1938
and began marketing it as the "Dennymite", and demonstrated it to the Army as the RP-2, and
after modifications as the RP-3 and RP-4 in 1939. In 1940, Denny and his partners won an
Army contract for their radio controlled RP-4, which became the Radioplane OQ-2. They
manufactured nearly fifteen thousand drones for the army during World War II.
1.2.3.2 Aerial Torpedoes
The US began experimenting with radio-controlled aircraft during the 1930s as well,
resulting in the "N2C-2" drone in 1937. The N2C-2 was remotely controlled from another aircraft,
called a TG-2. N2C-2 anti-aircraft target drones were in service by 1938.
The US also used RC aircraft, including modified B-17 and B-24 bombers in Operation
Aphrodite in combat on a small scale during World War II as very large aerial torpedoes, though
with no great success.
Fig: 1.3 Reginald Denny and Radio plane
Dept of ECE, KLECET, Chikodi 3

Unmanned Aerial Vehicles (UAV)
CHAPTER 2
CLASSIFICATION OF UAV’S
During recent decades, significant efforts have been devoted to increasing the flight
endurance and payload of UAVs, resulting in various UAV configurations with different sizes,
endurance levels, and capabilities.
2.1 Based on Characteristics of UAV Platform
Here, we attempt to classify UAVs according to their characteristics (aerodynamic
configuration, size, etc.).
UAV platforms typically fall into one of the following four categories:
Fixed-wing UAVs, which refer to unmanned airplanes (with wings) that require a runway
to take-off and land, or catapult launching. These generally have long endurance and can
fly at high cruising speeds.
Fig: 2.1 fixed wing UAV’s
Rotary-wing UAVs, also called rotorcraft UAVs or vertical take-off and landing
(VTOL) UAVs, which have the advantages of hovering capability and high
maneuverability. These capabilities are useful for many robotic missions, especially in
civilian applications. A rotorcraft UAV may have different configurations, with main
and tail rotors (conventional helicopter), coaxial rotors, multi-rotors, etc.
Dept of ECE, KLECET, Chikodi 4
Unmanned Aerial Vehicles (UAV)
Fig: 2.2 Rotary-wing UAV’s
Blimps such as balloons and airships, which are lighter than air and have long
endurance, fly at low speeds, and generally are large sized.
Fig: 2.3 Airship UAV’s
Flapping-wing UAVs, which have flexible and/or morphing small wings inspired by
birds and flying insects.
Fig: 2.4 Flapping-wing UAV’s
Dept of ECE, KLECET, Chikodi 5

Unmanned Aerial Vehicles (UAV)
There are also some other hybrid configurations or convertible configurations, which can
take-off vertically and tilt their rotors or body and fly like airplanes, such as the Bell Eagle Eye
UAV.
Fig: 2.5 Hybrid UAV’s
2.2 Based on Size and Endurance
Another criterion used at present to differentiate between aircraft is size and endurance:
High Altitude Long Endurance (HALE) UAVs, as for example, the Northrop-
Grumman Ryan’s Global Hawks (70,000 ft altitude, 35 h flight time, and 1,900 lb
payload).
Fig: 2.6 HALE UAVs
Dept of ECE, KLECET, Chikodi 6

Unmanned Aerial Vehicles (UAV)
Medium Altitude Long Endurance (MALE) UAVs, as for example General Atomics’
Predator (50,000 ft altitude, 25/30 h flight time, and 450 lb payload).
Fig: 2.7 MALE UAVs
Tactical UAVs such as the Hunter, Shadow 200, and Pioneer (up to 30,000 ft altitude,
5–6 h flight time, and 25 kg payload).
Fig: 2.8 Tactical UAVs
Dept of ECE, KLECET, Chikodi 7

Unmanned Aerial Vehicles (UAV)
CHAPTER 3
UNMANNED AIRCRAFT SYSTEM ELEMENTS
3.1 Overview
Most civilian unmanned systems consist of an unmanned or remotely piloted aircraft, the
human element, payload, control elements, and data link communication architecture. A military
UAS may also include elements such as a weapons system platform and the supported soldiers.
Fig 3.1 common UAS and how the various elements are combined to create the system.
3.2 Elements of UAV
A UAS is just not the vehicle that flies. An Unmanned Aircraft or Aerial System can be
divided into three succinct elements:
1. The vehicle or platform
2. Payload
3. Ground Control System or Station
Dept of ECE, KLECET, Chikodi 8

Unmanned Aerial Vehicles (UAV)
3.2.1 The Vehicle or Platform
The vehicle is the means to deliver the payload to its optimal position. UAS operate at all
altitudes and the propulsion system has to be tailored to the mission. Electric engines are used for
silent operations whereas UAS operating over long distances and at high altitude need jet engines.
The flight control system ensures the UAS follows the pre-programmed or Ground Control
Station-updated mission flight path in the most economical way avoiding obstacles and other air
users.
3.2.1.1 The Airframe
The airframe of an aircraft is its mechanical structure. It is typically considered to include
fuselage, wings and undercarriage and exclude the propulsion. Airframe design is a field of
aerospace engineering that combines aerodynamics, materials technology and manufacturing
methods to achieve balances of performance, reliability and cost.
Fig: 3.2 Airframe of Global Hawk
Dept of ECE, KLECET, Chikodi 9

Unmanned Aerial Vehicles (UAV)
3.2.1.2 The Propulsion System
The turbojet is the general-purpose engine. Turbojets consist of an air inlet, an air
compressor, a combustion chamber, a gas turbine (that drives the air compressor) and a nozzle.
The turbojet uses a series of fan-like compressor blades to bring air into the engine and compress
it. An entire section of the turbojet engine performs this function, which can be compared to the
compression stroke of the reciprocating engine.
Fig: 3.3 Turbojet Engine
In this section, there is a series of rotor and stator blades. Rotor blades perform somewhat
like propellers in that they gather and push air backward into the engine. The stator blades serve
to straighten the flow of this air as it passes from one set of rotor blades. The air is compressed
into the chamber, heated and expanded by the fuel combustion and then allowed to expand out
through the turbine into the nozzle where it is accelerated to high speed to provide propulsion.
3.2.1.3 Sense & Avoid System
The UAV uses a wide array of sensors to accomplish navigation and autonomous flight
control. Few of these are:
3.2.1.3.1 Gyroscope
A Gyroscope is a device for measuring or maintaining orientation, based on the principles
of angular momentum. Mechanically, a gyroscope is a spinning wheel or disk in which the axle is
free to assume any orientation. Although this orientation does not remain fixed, it changes in
response to an external torque much less and in a different direction than it would without the
large angular momentum associated with the disk's high rate of spin and moment of inertia. The
Dept of ECE, KLECET, Chikodi 10

Unmanned Aerial Vehicles (UAV)
device's orientation remains nearly fixed, regardless of the mounting platform's motion, because
mounting the device in a gimbal minimizes external torque.
Fig: 3.4 Single driving structure of 3-axis Fig: 3.5 MEMS structure dies of 3-axi
digital gyroscopes digital gyroscopes
Gyroscopes manufactured with MEMS technology have become widely available. These
are packaged similarly to other integrated circuits and may provide either analog or digital
outputs. In many cases, a single part includes gyroscopic sensors for multiple axes. Some parts
incorporate both a gyroscope and an accelerometer, in which case the output has six full degrees
of freedom.
3.2.1.3.2 Accelerometer
An Accelerometer is a device that measures acceleration. Accelerometers are sensors that
can measure the acceleration of the body in a specific direction, thus it can be used to determine
the forces acting on the plane by knowing the mass of the plane. This can assists in the derivation
of the aircraft model by finding some stability derivatives from the accelerometers data.
3.2.1.4 The Flight Control Computer or System
An Attitude Heading Reference System consists of sensors on three axes that provide
heading, attitude and yaw information for aircraft. They are designed to replace traditional
mechanical gyroscopic flight instruments and provide superior reliability and accuracy. AHRS
consist of either solid-state or MEMS gyroscopes and accelerometers on all three axes.
Dept of ECE, KLECET, Chikodi 11

Unmanned Aerial Vehicles (UAV)
AHRS have proven themselves to be highly reliable and are in common use in commercial
and business aircraft. AHRS are typically integrated with Electronic Flight Information
Systems (EFIS) (which are the central part of so-called glass cockpits) to form the Primary Flight
Display. AHRS can be combined with air data computers to form an "Air Data, Attitude And
Heading Reference Systems" (ADAHRS), which provide additional information such as airspeed,
altitude and outside air temperature.
3.2.2 The Payload
The purpose of a UAS is deliver or collect data usually in a dull, dirty or dangerous
environment. The payload is the most important element of the whole UAS as this determines the
payback or the economic or other gains.
3.2.2.1 Electro-Optical Sensing Systems and Infra-Red Systems
Strapped to manned aircraft or aerial drones, these multispectral sensors operate in
multiple modes – usually with both day (electro-optical camera) and night (infrared camera)
capability – to provide ground forces critical, time-sensitive information about the insurgent
hiding around the corner or entering a town by vehicle. Both sensor types are typically equipped
with high-magnification optical lenses that may provide zoom capability. They may also have
laser rangefinders or designator/rangefinders to help identify targets.
Fig: 3.7 Mmultiple Sensors EO Sensors and Radar on Global Hawk
Dept of ECE, KLECET, Chikodi 12

Unmanned Aerial Vehicles (UAV)
These airborne, multi-spectral sensors are frequently packaged into a turret, which is a
mounting for sensor payloads that is gyro-stabilised to ensure the delivery of clear images despite
aircraft vibrations. These turrets can be mounted on unmanned aerial vehicles, helicopters, fixed
wing aircraft and even aerostats.
Fig: 3.8 Gimbal EO/IR Sensors
In addition, image resolution improved with the advent of high-definition (HD) TV. Both
electro-optical (Charged Coupled Device TV) and infrared (thermal imaging) cameras have
benefitted from HD technology, which increases the number of pixels in a sensor’s array to
improve image resolution. In particular, focal plane arrays have evolved from a 320 x 240 format
to 640 x 480 pixels, and now, HD array formats of 1,920 × 1,080 pixels, as is the case with the
miniature 1080p HD camera in L-3 Wescam’s MX-15HDI sensor turret.
The Modern UAS also use Advanced IR Tracking Adjunct System (AIRTAS) which is a
gimbaled, stabilized, high-resolution sensor that provides passive tracking and real-time display.
It can provide threat assessment and ID beyond visual range, providing real-time threat and
damage assessment. AIRTAS is an advanced IR sensor, with a wide field of view and longer
range for HAWK missile users.
3.2.2.2 Radars
Radars can be designed to rapidly scan large areas and are less affected by weather, smoke
and dust. Without crossing international borders, long-range stand off surveillance radars, such as
the Joint Surveillance and Target Attack Radar System (Joint STARS) that uses Synthetic-
Aperture Radar (SAR) etc, can provide rapid surveillance of large areas of foreign territory.
Dept of ECE, KLECET, Chikodi 13

Unmanned Aerial Vehicles (UAV)
Fig: 3.9 Synthetic Aperture Radar (SAR)
Synthetic-Aperture Radar is a form of radar whose defining characteristic is its use of
relative motion, between an antenna and its target region, to provide distinctive long-term
coherent-signal variations that are exploited to obtain finer spatial resolution that is possible with
conventional beam-scanning means.
SAR is usually implemented by mounting, on a moving platform such as an aircraft or
spacecraft, a single beam-forming antenna from which a target scene is repeatedly illuminated
with pulses of radio waves at wavelengths anywhere from a meter down to millimetres. The many
echo waveforms received successively at the different antenna positions are coherently detected
and stored and then post-processed together to resolve elements in an image of the target region.
In a typical SAR application, a single radar antenna is attached to an aircraft or spacecraft
so as to radiate a beam whose wave-propagation direction has a substantial component
perpendicular to the flight-path direction. The beam is allowed to be broad in the vertical direction
so it will illuminate the terrain from nearly beneath the aircraft out toward the horizon.
Resolution in the range dimension of the image is accomplished by creating pulses which
define very short time intervals, either by emitting short pulses consisting of a "carrier" frequency
and the necessary "sidebands", all within a certain bandwidth, or by using longer "chirp pulses" in
which frequency varies (often linearly) with time within that bandwidth. The differing times at
which echoes return allow points at different distances to be distinguished.
Dept of ECE, KLECET, Chikodi 14

Unmanned Aerial Vehicles (UAV)
Fig: 3.10 Radars
3.2.2.3 Munitions
Fielding larger Unmanned Aerial Systems (UAS), such as the MQ-9 Reaper, capable of
carrying much heavier payloads will open new horizons for the use of standard aerial weapons,
such as laser guided gravity dropped bombs. The main benefit of such weapons is their relative
low cost, ability to deploy from high altitude and absence of telltale acoustic or visual launch
signature. The MQ-9 Reaper will be able to carry stacks of Deployable 250 pound Small
Diameter Bomb (SDB) relatively lightweight, high precision weapons. Current SDBs are fitted
with GPS guidance kits.
Fig: 3.11 UAV Weapons -1
Fig: 3.12 UAV Weapons -2
Dept of ECE, KLECET, Chikodi 15

Unmanned Aerial Vehicles (UAV)
Other improvements will introduce "Focused Lethality Warheads" utilizing the Dense
Inert Metal Explosive (DIME) technology, developed by the US Air Force and Lawrence
Livermore national laboratory.
Essential improvements applied on UAVs just after the operation in Kosovo included the
integration of laser designator in the standard EO/IR UAV payload. Work on a weaponized
version of the Predator commenced, culminating in a series of test firings of Lockheed martin
Hellfire missiles from USAF Predator UAVs in 2001. Another example for an early generation
armed UAVs is the Nothrop Grumman / IAI MQ-5A Hunter, an armed derivative of the RQ-5A
UAV. This aircraft was also fitted with an extended wing, carrying hard-points for two weapons
such as Hellfire or Northrop Grumman Viper-Strike munitions. The General Atomics Gnat UAV
is also designed to carry Hellfire missiles.
3.2.3 The Ground Control System or Station
The Ground Control Station (GCS) in tomorrow’s UAS environment will be part of an
integral part of managed airspace. It will house the UAS pilot and the UAS commander and will
appear to the outside world as if both people are actually aboard the air vehicle. To achieve all
this, the GCS must have secure communications with both the air-vehicle and the international,
national, regional and local air traffic management infrastructure.
3.2.3.1 Avionics Flight Display
The GCS can be configured for many different applications by using the modular
electronics compartment. The modular electronics compartment contains a comprehensive set of
connections which allows the user to install application specific hardware such as autopilot RF-
modems, video receivers, data links, data storage and recording devices.The GCS is housed in a
military-grade transportation case for maximum protection. A removable Cordura accessories bag
makes it convenient to carry small components and accessories such as a mouse, wiring, antennas
and external GPS antenna.
Dept of ECE, KLECET, Chikodi 16

Unmanned Aerial Vehicles (UAV)
Fig: 3.13 GCS Control System of UAV
Fig: 3.14 Portable GCS Control of UAV
Dept of ECE, KLECET, Chikodi 17

Unmanned Aerial Vehicles (UAV)
3.2.3.2 Navigation Guidance and Control Systems
Guidance, Navigation and Control (GN&C) algorithms are the core of flight software to
successfully complete the assigned mission through autonomous flight. It offers to the vehicle the
ability to follow waypoints and execute other pre-programmed maneuvers like automatic take-off
and landing, hovering and trajectory tracking.
The overall system consists of six functions:
1. GCS for mission definition and high-level decisions making.
2. Basic guidance system for path planning and trajectory generation.
3. Navigation system for sensors raw data fusion and vehicle’s state vector estimation. The
standard navigation sensors and capabilities onboard the rotorcrafts have been enhanced to
include a visual odometer.
4. Nonlinear controller for stabilization and trajectory tracking.
5. Communication system and interface between the autopilot and the vehicle.
6. The aerial platform.
Dept of ECE, KLECET, Chikodi 18

Unmanned Aerial Vehicles (UAV)
CHAPTER 4
CASE STUDY OF PREDATOR C: AVENGER
4.1 Predator C Avenger Introduction
The General Atomics Avenger (formerly Predator C) is a developmental unmanned
combat air vehicle built by General Atomics Aeronautical Systems for the United States military.
Its first flight occurred on 4 April 2011. Unlike the previous MQ-1 Predator and MQ-9
Reaper (Predator B) drones, the Avenger is powered by a turbofan engine, and its design
includes stealth features such as internal weapons storage, and an S-shaped exhaust for reduced
heat and radar signature.
The Avenger includes a retractable electro-optical/infrared sensor, internal weapons bay,
and folding wings. The aircraft’s structure was designed with the flexibility to accommodate
carrier suitable landing gear, tail-hook, drag devices, and other provisions for carrier operations.
Fig: 4.1 Predator C Avengers UAV
Dept of ECE, KLECET, Chikodi 19

Unmanned Aerial Vehicles (UAV)
4.2 Predator C Avenger Specification
4.2.1 General characteristics
Length: 44 ft (13 m)
Wingspan: 66 ft (20 m)
Weight: 18,200 lb (8,255 kg)
Fuel capacity: 7,900 pounds (3,600 kg)
4.2.2 Performance
Maximum speed: 460 mph (740 km/h; 400 kn)
Cruise speed: 402 mph (349 kn; 647 km/h)
Endurance: 18 hours
4.2.3 Armament
Internal weapons bay with 3,500 pounds (1,600 kg) capacity. 6 external hard points.
6,500 pounds (2,900 kg) payload total.
AGM-114P Hellfire missiles
GBU-39 SDB - 250 lb bombs
GBU-12 Paveway II , GBU-38 JDAM - 500 lb bombs
GBU-16 Paveway II , GBU-32 JDAM - 1000 lb bombs
GBU-31 JDAM - 2000 lb bombs
Dept of ECE, KLECET, Chikodi 20

Unmanned Aerial Vehicles (UAV)
CHAPTER 5
ADVANTAGES AND DISADVANTAGES OF UAV
5.1 ADVANTAGES
The advantages of using an Unmanned Air Vehicle, relative to use of a manned aircraft, are
that the UAV:
1. Does not contain, or need, a qualified pilot on board
2. Can enter environments that are dangerous to human life
3. Reduces the exposure risk of the aircraft operator
4. Can stay in the air for up to 30 hours, performing a precise, repetitive raster scan of a
region, day-after-day, night-after-night in complete darkness, or, in fog, under computer
control:
a. performing a geological survey
b. performing visual or thermal imaging of a region
c. measuring cell phone, radio, or, TV coverage over any terrain
5. Can be programmed to complete the mission autonomously even when contact with its
GCS is lost.
6. Drones can have more pinpoint accuracy from greater distances, thus reducing collateral
damage to civilians and infrastructure.
7. Drones are as lethal to enemy combats as regular airplanes.
Dept of ECE, KLECET, Chikodi 21

Unmanned Aerial Vehicles (UAV)
8. Drones have proven to increase surveillance, reconnaissance, and general military
intelligence.
5.2 DISADVANTAGES
1. Costly compared to manned vehicles.
2. Limited Abilities: Drones have obvious limitations. For example, they cannot
communicate with civilians for more detailed intelligence.
3. More hardware complexity.
CHAPTER 6
APPLICATIONS OF UAV
UAVs perform a wide variety of functions. The majority of these functions are some form
of remote sensing; this is central to the reconnaissance role most UAVs fulfill. Less common
UAV functions include interaction and transport.
6.1 Remote Sensing
UAV remote sensing functions include electromagnetic spectrum sensors, biological
sensors, and chemical sensors. A UAV's electromagnetic sensors typically include visual
spectrum, infrared cameras as well as radar systems. Other electromagnetic wave detectors such
as microwave and ultraviolet spectrum sensors may also be used, but are uncommon. Biological
sensors are sensors capable of detecting the airborne presence of various microorganisms and
other biological factors. Chemical sensors use laser spectroscopy to analyze the concentrations of
each element in the air.
6.2 Aerial Surveillance
Aerial surveillance of large areas is made possible with UAV systems. Surveillance
applications include: wildfire mapping, pipeline security, home security, military, road patrol .
Dept of ECE, KLECET, Chikodi 22

Unmanned Aerial Vehicles (UAV)
The trend for use of UAV technology in commercial aerial surveillance is expanding rapidly with
increased development of automated object detection approaches.
6.3 Transport
UAVs can transport goods using various means based on the configuration of the UAV
itself. Most payloads are stored in an internal payload bay somewhere in the airframe. For
any helicopter configurations, external payloads can be tethered(tied) to the bottom of the
airframe. With fixed-wing UAVs, payloads can also be attached to the airframe.
6.4 Armed Attacks
MQ-1 Predator UAVs armed with Hellfire missiles are increasingly used by the U.S. as
platforms for hitting ground targets. Armed Predators were first used in late 2001 from bases
in Uzbekistan, mostly aimed at assassinating high profile individuals (terrorist leaders etc) inside
Afghanistan. Since then, there have been many reported cases of such attacks taking place in
Afghanistan, Pakistan, Yemen and Somalia. The advantage of using an unmanned vehicle, rather
than a manned aircraft, in such cases is to avoid a diplomatic embarrassment should the aircraft be
shot down and the pilots captured, since the bombings take place in countries deemed friendly and
without the official permission of those countries.
6.6 Search and Rescue
UAVs will likely play an increased role in search and rescue in the United States. This
was demonstrated by the use of UAVs during the 2008 hurricanes that struck Louisiana and
Texas. Micro UAVs, such as the Aeryon Scout have been used to perform Search and Rescue
activities on a smaller scale, such as the search for missing persons.
Dept of ECE, KLECET, Chikodi 23

Unmanned Aerial Vehicles (UAV)
CHAPTER 7
CONCLUSION
From the results of this study, it is clear that the future of the UAV as an all-around
combat vehicle is a possibility. With more research and technological advances, it is possible that
the UAV may well replace manned combat aircraft in the future.
The advantages of unmanned aerial vehicle against manned combat aircraft are numerous.
First is the risk of being shot down. If a UAV is shot down, the military can just assemble another
one and be ready to fly in just minutes while if a manned combat aircraft is shot down, the risk of
the pilot being killed and/or captured is high. With combat UAVs, casualties in war could be
reduced tremendously.
The main contribution that is to be accomplished in this is the development of a low cost
avionics unit.This avionics unit included a variety of sensors and digital display units that are
needed to develop a complete autopilot system.
Dept of ECE, KLECET, Chikodi 24

Unmanned Aerial Vehicles (UAV)
REFERENCES
[1]The 2015 International Conference on Unmanned Aircraft Systems
June 9 - 12, 2015 Denver Marriott Tech Center Denver, Colorado, USA
[2] Unmanned aerial vehicle (UAV)
http://books.google.co.in/books?isbn=4431538589
[3] History of unmanned aerial vehicles
Http:/www.huav.com/History_of_unmanned_aerial_vehicles
[4] Autonomous Flying Robots
http://books.google.co.in/books?isbn=4431538569
[5] US Navy UAVs in Actionhttp://www.theuav.com/
Dept of ECE, KLECET, Chikodi 25

Unmanned Aerial Vehicles (UAV)
[6] General Atomics Predator C Avenger http://General_Atomics_Avenger
Dept of ECE, KLECET, Chikodi 26
Related Documents





![For The Region: Report, Report, Report [Eng]](https://static.cupdf.com/doc/110x72/579079761a28ab6874c751c6/for-the-region-report-report-report-eng.jpg)





