1 Abstract --With the increasing demand in PHEV safety, performance, etc., the PHEV applications require a battery model which can accurately reflect and predict the battery performance under different dynamic loads, environmental conditions, and battery conditions. An accurate battery model is the basis of the precise battery state (state of charge, state of health and state of function) estimation. And the precise battery state information can be used to enable the optimal control over the battery’s charging/discharging process, therefore to manage the battery to its optimal usage, prolong the battery life, and enable vehicle to grid and vehicle to home applications fitting into the future smart grid scenario. One of the challenges in constructing such a model is to accurately reflect the highly nonlinear battery I-V performance, such as the battery’s relaxation effect and the hysteresis effect. This paper will mainly focus on the relaxatio n effect modeling. The relaxatio n effect will be modeled through series connected RC circuits. Accuracy analysis demonstrates that with more RC circuit the battery model gives better accuracy, yet increases the total computational time. Therefore, to select an appropriate battery model for a certain PHEV application is formulated as a multi-objective optimizatio n problem balancing between the model accuracy and the computational complexity within the constraints set by the minimum accuracy required and the maximum computational time allowed. This multi-objective optimization problem is mapped into a weighted optimization problem to solve. Index Terms —Electric battery model, plug-in hybrid electric vehicle (PHEV), battery relaxation effect, accuracy analysis, computational complexity analysis, multi-objective optimization. I. I NTRODUCTION LUG-IN Hybrid Electric Vehicles (PHEVs) have been drawing significant attention because of the increase in oil consumption and environmental pollution [1-2]. The cost for electricity to power PHEVs for all-electric operation has been estimated at less than one quarter of the cost of gasoline. Also, PHEVs are environment friendly. With electricity recharging the PHEV batteries coming from renewable energy, air pollution and dependence on petroleum can be reduced dramatically. In addition, PHEVs provide convenience to customers with the choice of home recharging during night or This work was supported by Engineering Research Centers (ERC) Program of the National Science Foundation under Award Number EEC- 08212121. Hanlei Zhang is with the Department of Electrical and Computer Engineering, North Carolina State University, Raleigh, NC 27606 USA (e- mail: [email protected]). Mo-Yuen Chow is with the Department of Electrical and Computer Engineering, North Carolina State University, Raleigh, NC 27606 USA (e- mail: [email protected]). parking deck charging during work [1]. PHEVs also provide additional energy storage for future smart grids through Vehicle-to-Grid (V2G) [3] and Vehicle-to-Home (V2H) [4] technologies. For practical reasons, consumers need PHEVs with compact and long life battery packs. In addition, the majority of the current power system infrastructures is more than 50 years old and is difficult to satisfy the ever-increasing customer needs, especially when PHEVs are penetrating the market in the foreseeable future [1, 5]. In both of the V2G and V2H techniques, introduced to enable the smart grid concept put forward to reform the existing power systems, PHEV batteries are especially important because they act as spare/reserved power (4kW/per car) when power from grid is insufficient, and power storages to absorb the excessive power provided by the g rid during off-peak hours [6]. Like a gasoline automobile driver, a PHEV driver also needs to know how far the car can still cover with its battery, and how much time left for him to re-charge his battery. The battery’s state information, such as its state-of-charge (SoC), state-of-healt h (SoH) and state-of-function (SoF) [7], can help answer these questions. Yet, precise battery state information will only be obtained with an accurate battery model. The battery state information enables optimal control over the battery’s charging/dischargi ng process, reduce the risk of overcharge and undercharge the battery [8], prolong the battery life, manage the battery to its optimal usage [9], and enable optimal V2G and V2H applications. As early as 1965, Shepherd [10] developed a mathematical equation, as in (1) to directly describe the electrochemical behavior of a battery in terms of a cell’s potential E , no-load voltage and the potential drop due to the internal resistance N . No-load voltage is fitted by a constant voltage E s , a reciprocal function and an exponential function. ( ) 1 exp . s Q E E K i A BQ it Ni Q it − ⎛ ⎞ = − + − − ⎜ ⎟ − ⎝ ⎠ (1) The generic battery model [11] provided by MATLAB/Simulink SimPowerSystems is based on this equation. However, this model is too simple to reflect the performance of a battery under dynamic changing current load. Impedance-based model, adopted by many researchers [12- 13], measures the battery’s impedance with electrochemical impedance spectroscopy (EIS) method, then use an equivalent circuit to represent the impedance spectra. Randle’s circuit [14] is often used for this purpose because it has a similar Comprehensiv e Dynamic Battery Modeling for PHEV Applications Hanlei Zhang. Student Member. IEEE. and Mo-Yuen Chow. Fellow. IEEE. P 978-1-4244-6551-4/10/$26. 00 ©2010 IEEE

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 1/6
1
Abstract --With the increasing demand in PHEV safety,
performance, etc., the PHEV applications require a battery
model which can accurately reflect and predict the battery
performance under different dynamic loads, environmental
conditions, and battery conditions. An accurate battery model is
the basis of the precise battery state (state of charge, state of
health and state of function) estimation. And the precise battery
state information can be used to enable the optimal control over
the battery’s charging/discharging process, therefore to manage
the battery to its optimal usage, prolong the battery life, and
enable vehicle to grid and vehicle to home applications fitting into
the future smart grid scenario. One of the challenges inconstructing such a model is to accurately reflect the highly
nonlinear battery I-V performance, such as the battery’s
relaxation effect and the hysteresis effect. This paper will mainly
focus on the relaxation effect modeling. The relaxation effect will
be modeled through series connected RC circuits. Accuracy
analysis demonstrates that with more RC circuit the battery
model gives better accuracy, yet increases the total computational
time. Therefore, to select an appropriate battery model for a
certain PHEV application is formulated as a multi-objective
optimization problem balancing between the model accuracy and
the computational complexity within the constraints set by the
minimum accuracy required and the maximum computational
time allowed. This multi-objective optimization problem is
mapped into a weighted optimization problem to solve.
Index Terms —Electric battery model, plug-in hybrid electric
vehicle (PHEV), battery relaxation effect, accuracy analysis,
computational complexity analysis, multi-objective optimization.
I. I NTRODUCTION
LUG-IN Hybrid Electric Vehicles (PHEVs) have been
drawing significant attention because of the increase in oil
consumption and environmental pollution [1-2]. The cost for
electricity to power PHEVs for all-electric operation has been
estimated at less than one quarter of the cost of gasoline. Also,
PHEVs are environment friendly. With electricity recharging
the PHEV batteries coming from renewable energy, air
pollution and dependence on petroleum can be reduced
dramatically. In addition, PHEVs provide convenience to
customers with the choice of home recharging during night or
This work was supported by Engineering Research Centers (ERC)Program of the National Science Foundation under Award Number EEC-
08212121.
Hanlei Zhang is with the Department of Electrical and Computer
Engineering, North Carolina State University, Raleigh, NC 27606 USA (e-
mail: [email protected]).Mo-Yuen Chow is with the Department of Electrical and Computer
Engineering, North Carolina State University, Raleigh, NC 27606 USA (e-
mail: [email protected]).
parking deck charging during work [1]. PHEVs also provide
additional energy storage for future smart grids through
Vehicle-to-Grid (V2G) [3] and Vehicle-to-Home (V2H) [4]
technologies.
For practical reasons, consumers need PHEVs with
compact and long life battery packs. In addition, the majority
of the current power system infrastructures is more than 50
years old and is difficult to satisfy the ever-increasing
customer needs, especially when PHEVs are penetrating the
market in the foreseeable future [1, 5]. In both of the V2G and
V2H techniques, introduced to enable the smart grid concept put forward to reform the existing power systems, PHEV
batteries are especially important because they act as
spare/reserved power (4kW/per car) when power from grid is
insufficient, and power storages to absorb the excessive power
provided by the grid during off-peak hours [6].
Like a gasoline automobile driver, a PHEV driver also
needs to know how far the car can still cover with its battery,
and how much time left for him to re-charge his battery. The
battery’s state information, such as its state-of-charge (SoC),
state-of-health (SoH) and state-of-function (SoF) [7], can help
answer these questions. Yet, precise battery state information
will only be obtained with an accurate battery model. The
battery state information enables optimal control over the battery’s charging/discharging process, reduce the risk of
overcharge and undercharge the battery [8], prolong the
battery life, manage the battery to its optimal usage [9], and
enable optimal V2G and V2H applications.
As early as 1965, Shepherd [10] developed a mathematical
equation, as in (1) to directly describe the electrochemical
behavior of a battery in terms of a cell’s potential E , no-load
voltage and the potential drop due to the internal resistance N .
No-load voltage is fitted by a constant voltage E s, a reciprocal
function and an exponential function.
( )
1exp . s
Q E E K i A BQ it Ni
Q it
−⎛ ⎞= − + − −⎜ ⎟
−⎝ ⎠
(1)
The generic battery model [11] provided by
MATLAB/Simulink SimPowerSystems is based on this
equation. However, this model is too simple to reflect the
performance of a battery under dynamic changing current
load.
Impedance-based model, adopted by many researchers [12-
13], measures the battery’s impedance with electrochemical
impedance spectroscopy (EIS) method, then use an equivalent
circuit to represent the impedance spectra. Randle’s circuit
[14] is often used for this purpose because it has a similar
Comprehensive Dynamic Battery Modeling for
PHEV ApplicationsHanlei Zhang. Student Member. IEEE. and Mo-Yuen Chow. Fellow. IEEE.
P
978-1-4244-6551-4/10/$26.00 ©2010 IEEE
7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 2/6
2
impedance spectrum with that of a Lithium-Ion battery.
However, researchers also have demonstrated that different
battery types, such as the Lithium-Ion batteries [12] and
NIMH batteries [13], have different shape of impedance
spectra. Therefore, it is difficult to construct a parameterized
battery model based on this method.
Power provided by battery comes from the chemical
reaction inside, and this process is highly nonlinear. One of
the challenges of constructing an accurate battery model is toaccurately reflect these highly nonlinear relationships, such as
the battery relaxation effect and hysteresis effect. If a battery
is left to relax after charging or discharging, it takes some time
for the terminal voltage to relax to the new steady state value.
This is called relaxation effect. And because of the hysteresis
effect, the voc (open circuit voltage) of a battery not only
depends on the battery SoC, but also influenced by the
battery’s charging/discharging history. In practice, PHEVs
will not always operate under constant current. Load current
of the battery changes when a PHEV accelerates or
decelerates. In addition, if driven under charge-sustaining
mode, or parked at home/packing deck with V2H or V2G
technique enabled, the PHEV battery will be charged anddischarged momentarily. In order to reflect the battery
performance in real life, a battery model must be able to
reflect both relaxation and hysteresis effects accurately.
In addition, PHEVs are usually working under a wide
ambient temperature, from -27°C to +40°C. The battery
performance can drift dramatically with temperature variation.
Usually higher temperature means more capacity can be
drawn out of the battery. The battery performance also keeps
deteriorating with its age. After 1000 charging cycles, under
25˚ C, a Lithium-Ion battery may loss 10% of its capacity. The
battery degradation is also temperature related. With higher
temperature, this deterioration process will be faster.
Therefore, in order to be accurate, a battery model should also
be able to adapt to its environmental conditions and age.
Recently, researchers [15-17] are using Thevenin’s theorem
to construct battery models. The basic idea is to use resistors
representing the battery’s internal resistance and a controlled
voltage source representing the battery’s electromotive force
(EMF). This method reflects the battery performance
macroscopically, and can be used to construct a parameterized
model with different parameters representing different
batteries and types. With this model technique, the relaxation
effect can be modeled by series connected RC parallel circuits
[15], and the hysteresis effect can be modeled through voc-SoC
hysteresis loop. Therefore, the model constructed is accurateunder dynamic current load. In addition, with model parameter
adaptation, this model can also reflect the environmental
effects (temperature, humidity, etc.) and aging effect.
In this paper, an equivalent circuit based on the Thevenin's
theorem is used as a battery’s base model to provide accurate
battery I-V performance. Series connected RC parallel circuits
are used to model the battery’s relaxation effect. Later, the voc-
SoC hysteresis loop (obtained from charging/discharging
experiments) will also be used to reflect the battery hysteresis
effect to further improve the accuracy of the battery model.
The characteristic parameters of the battery model are
identified through pulse charging/discharging techniques,
which can be easily implemented with standard laboratory
equipments, such as power supply, electronic load and multi-
meters. Parameter-SoC relationship can be identified through
the terminal voltage measurements and parameter-current
relationship can also be identified through different current
value used during the pulse charging/discharging experiments.
Heuristically, with more RC parallel circuits used, themodel will be more accurate in reflecting a battery’s I-V
performance. However, more RC parallel circuits also mean
higher complexity, which is often not preferred for real-world
applications. Through accuracy analysis and computational
complexity analysis, this paper provides criterions for the
model selection based on the application requirements.
The remainder of the paper is organized as the following.
Section II introduces the battery equivalent circuit used and
the relaxation effect modeling. Section III describes the model
parameter identification method. Section IV uses the accuracy
analysis and computational complexity analysis to deduce the
criterions for the model selection according to application
requirements. Finally, conclusions are drawn in Section V.
II. THE EQUIVALENT CIRCUIT OF O NE BATTERY CELL
A. Equivalent Circuit
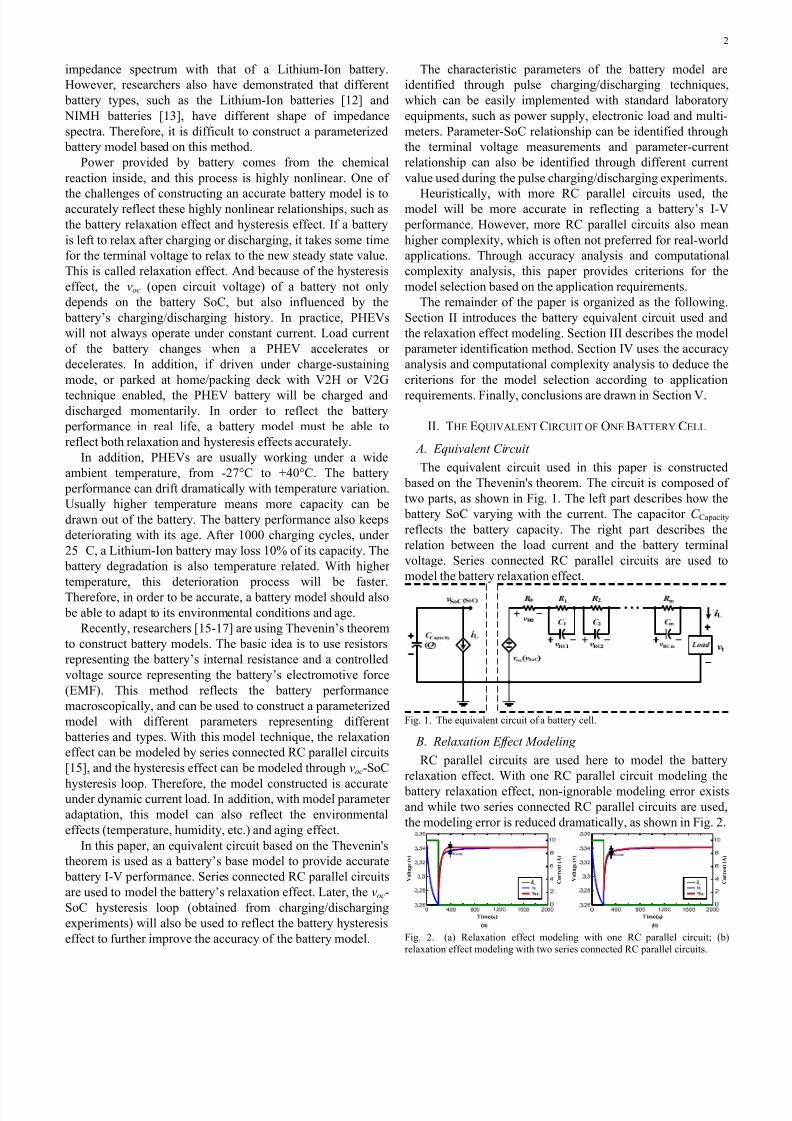
The equivalent circuit used in this paper is constructed
based on the Thevenin's theorem. The circuit is composed of
two parts, as shown in Fig. 1. The left part describes how the
battery SoC varying with the current. The capacitor C Capacity
reflects the battery capacity. The right part describes the
relation between the load current and the battery terminal
voltage. Series connected RC parallel circuits are used to
model the battery relaxation effect.
Fig. 1. The equivalent circuit of a battery cell.
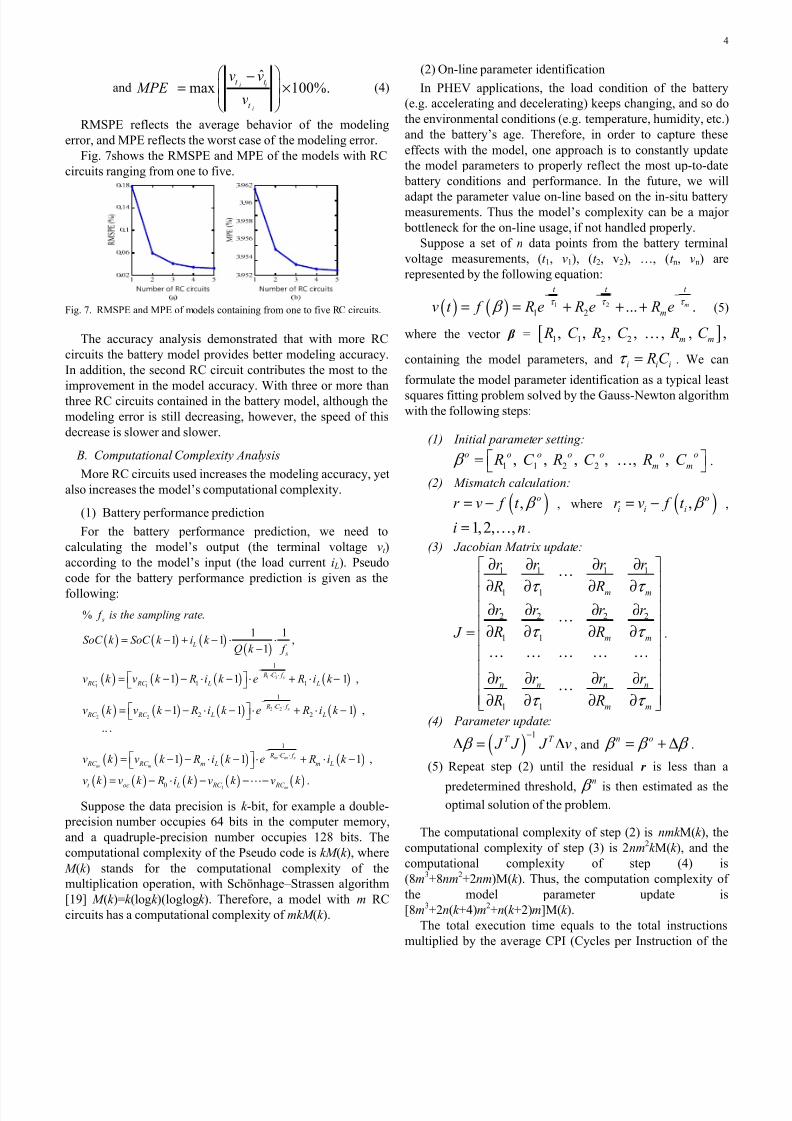
B. Relaxation Effect Modeling
RC parallel circuits are used here to model the battery
relaxation effect. With one RC parallel circuit modeling the
battery relaxation effect, non-ignorable modeling error exists
and while two series connected RC parallel circuits are used,
the modeling error is reduced dramatically, as shown in Fig. 2.
V o l t a g e ( v )
C u r r e n t ( A )
V o l t a g e ( v )
C u r r e n t ( A )
Fig. 2. (a) Relaxation effect modeling with one RC parallel circuit; (b)
relaxation effect modeling with two series connected RC parallel circuits.

7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 3/6
3
Heuristically, more RC circuits provide better modeling
accuracy; however, criterions must be enacted to demonstrate
how many is appropriate. In Section IV, the proper number of
RC circuits will be discussed for the PHEV applications.
III. MODEL PARAMETER IDENTIFICATION
A. Charging/discharging Experiment
In order to obtain the characteristic parameters of the
model, an automatic remote battery charging/discharging web
based workstation has been developed with standard
laboratory equipments, as shown in Fig. 3.
Fig. 3. The automatic remote battery charging/discharging web-based
workstation.
A power supply (ZUP120-3.6) is used to charge the battery,
with a standard constant current constant voltage (CCCV)
charging method [18] to ensure a full charging. An electronic
load (Chroma 63108) is used to discharge the battery. Two
multi-meters (Fluke 45) are used to measure the battery
terminal voltage and the load current.
B. Parameter Identification Algorithm
Fig. 4 shows the voltage and current measurements from
the pulse discharge experiment.
Fig. 4. Terminal voltage and load current of the battery during the pulse
discharge experiment.
Theoretically, only after infinite relaxation time, v3 equals
to the battery EMF. However, infinite relaxation time is not
realistic in practice. Here, the relaxation time is set as half an
hour (at least ten times the constant of the RC circuit
dynamics), which is a good enough approximation of the
steady-state error value with an error less than 0.0624%.
The voltage increase from v1 to v2 equals to the voltage on
the internal resistor R0 before t 0. Thus, R0 is calculated though:
2 10
. L
v v R
i
−= (2)
Through least squares error fitting, the other parameters,
R1, C 1, …, Rm and C m can also be identified.
Fig. 5 shows the model characteristic parameters identified
with this method.
Fig. 5. Battery model characteristic parameters identified.
IV. MODEL A NALYSIS
A. Accuracy Analysis
Lett
v be the battery terminal voltage obtained from
experiment, and ˆt
v be the estimated battery terminal voltage
obtained from the model. The modeling error is defined as ˆ= −
t t e v v , a n-dimension vector (n is the sampling points).
Fig. 6 shows the comparison between the experimental
battery terminal voltage and the model estimated battery
terminal voltage and the modeling error e with different
number of RC circuit.
0 0.5 1 1.5 2Time (s)
0.2
0
-0.2
0.1
-0.1
×104
3.5
2.9
3.2
0 0.5 1 1.5 2Time (s) ×10
4
(a) One RC model
0 0.5 1 1.5 2Time (s)
0.2
0
-0.2
0.1
-0.1
×104
3.5
2.9
3.2
0 0.5 1 1.5 2Time (s) ×10
4
(b) Two RC model
0 0.5 1 1.5 2Time (s)
0.2
0
-0.2
0.1
-0.1
×104
3.5
2.9
3.2
0 0.5 1 1.5 2Time (s) ×10
4
(c) Three RC model
vt
vt
vt
vt
vt
vt
Fig. 6. The experimental battery terminal voltage and the estimated battery
terminal voltage from battery model, and the modeling error of battery modelscontaining from one to three RC circuits.
Root mean square percentage error (RMSPE) and
maximum percentage error (MPE) as described in (3) and (4)
are used to quantify the model accuracy:
2
1
ˆ1100%,i i
i
nt t
i t
v v RMSPE
n v=
⎛ ⎞−= ×⎜ ⎟⎜ ⎟
⎝ ⎠∑
(3)
0 0.5 12.5
3
3.5
V o c / v
0 0.5 10
20
40
R 0 / m o h m
0 0.5 10
10
20
30
R 1 / m o h m
0 0.5 11
2
3
C 1 / k F
0 0.5 10
10
20
SoC
R 2 / m o h m
0 0.5 10
0.5
1
SoC
C 2 / k F
7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 4/6
4
andˆ
max 100%.i i
i
t t
t
v v MPE
v
⎛ ⎞−⎜ ⎟= ×⎜ ⎟⎝ ⎠
(4)
RMSPE reflects the average behavior of the modeling
error, and MPE reflects the worst case of the modeling error.
Fig. 7shows the RMSPE and MPE of the models with RC
circuits ranging from one to five.
Fig. 7. RMSPE and MPE of models containing from one to five RC circuits.
The accuracy analysis demonstrated that with more RC
circuits the battery model provides better modeling accuracy.
In addition, the second RC circuit contributes the most to the
improvement in the model accuracy. With three or more than
three RC circuits contained in the battery model, although the
modeling error is still decreasing, however, the speed of this
decrease is slower and slower.
B. Computational Complexity Analysis
More RC circuits used increases the modeling accuracy, yet
also increases the model’s computational complexity.
(1) Battery performance prediction
For the battery performance prediction, we need to
calculating the model’s output (the terminal voltage vt )
according to the model’s input (the load current i L). Pseudo
code for the battery performance prediction is given as the
following:
( ) ( ) ( )( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
1 1
1 1
2 2
2 2
1
1 1
1
2 2
1
% .
1 11 1 ,
1
1 1 1 ,
1 1 1 ,
1 1
s
s
m m s
m m
s
L
s
R C f
RC RC L L
R C f
RC RC L L
R C f
RC RC m L
f is the sampling rate
SoC k SoC k i k Q k f
v k v k R i k e R i k
v k v k R i k e R i k
v k v k R i k e
−⋅ ⋅
−⋅ ⋅
−⋅ ⋅
= − + − ⋅ ⋅−
⎡ ⎤= − − ⋅ − ⋅ + ⋅ −⎣ ⎦
⎡ ⎤= − − ⋅ − ⋅ + ⋅ −⎣ ⎦
⋅⋅ ⋅
⎡ ⎤= − − ⋅ − ⋅⎣ ⎦ ( )
( ) ( ) ( ) ( ) ( )10
1 ,
.m
m L
t oc L RC RC
R i k
v k v k R i k v k v k
+ ⋅ −
= − ⋅ − − −L
Suppose the data precision is k -bit, for example a double-
precision number occupies 64 bits in the computer memory,
and a quadruple-precision number occupies 128 bits. The
computational complexity of the Pseudo code is kM (k ), where
M (k ) stands for the computational complexity of the
multiplication operation, with Schönhage–Strassen algorithm
[19] M (k )=k (logk )(loglogk ). Therefore, a model with m RC
circuits has a computational complexity of mkM (k ).
(2) On-line parameter identification
In PHEV applications, the load condition of the battery
(e.g. accelerating and decelerating) keeps changing, and so do
the environmental conditions (e.g. temperature, humidity, etc.)
and the battery’s age. Therefore, in order to capture these
effects with the model, one approach is to constantly update
the model parameters to properly reflect the most up-to-date
battery conditions and performance. In the future, we will
adapt the parameter value on-line based on the in-situ batterymeasurements. Thus the model’s complexity can be a major
bottleneck for the on-line usage, if not handled properly.
Suppose a set of n data points from the battery terminal
voltage measurements, (t 1, v1), (t 2, v2), …, (t n, vn) are
represented by the following equation:
( ) ( ) 1 2
1 2 ... .m
t t t
mv t f R e R e R e τ τ τ β −− −
= = + + +
(5)
where the vector β = [ ]1 1 2 2, , , , , , ,m m R C R C R C K
containing the model parameters, and i i i RC τ = . We can
formulate the model parameter identification as a typical least
squares fitting problem solved by the Gauss-Newton algorithmwith the following steps:
(1) Initial parameter setting:
1 1 2 2, , , , , ,o o o o o o o
m m R C R C R C β ⎡ ⎤= ⎣ ⎦K .
(2) Mismatch calculation:
( ), or v f t β = − , where ( ), o
i i ir v f t β = − ,
1,2, ,i n= K .
(3) Jacobian Matrix update:
1 1 1 1
1 1
2 2 2 2
1 1
1 1
m m
m m
n n n n
m m
r r r r
R Rr r r r
R R J
r r r r
R R
τ τ
τ τ
τ τ
∂ ∂ ∂ ∂⎡ ⎤⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥∂ ∂ ∂ ∂⎢ ⎥
⎢ ⎥∂ ∂ ∂ ∂= ⎢ ⎥
⎢ ⎥⎢ ⎥
∂ ∂ ∂ ∂⎢ ⎥⎢ ⎥∂ ∂ ∂ ∂⎣ ⎦
L
L
L L L L L
L
.
(4) Parameter update:
( )1
T T J J J v β −
Δ = Δ , andn o β β β = + Δ .
(5) Repeat step (2) until the residual r is less than a
predetermined threshold,n
β is then estimated as theoptimal solution of the problem.
The computational complexity of step (2) is nmk M(k ), the
computational complexity of step (3) is 2nm2k M(k ), and the
computational complexity of step (4) is
(8m3+8nm2+2nm)M(k ). Thus, the computation complexity of
the model parameter update is
[8m3+2n(k +4)m2+n(k +2)m]M(k ).
The total execution time equals to the total instructions
multiplied by the average CPI (Cycles per Instruction of the
7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 5/6
5
CPU) and divided by the clock rate of the CPU (33MHz for a
typical microprocessor for an embedded system, such as the
Intel 80386). The average CPI of a CPU is usually around 2.5,
means 2.5 CPU cycles are needed to complete each
instruction. The total execution time consumed by the battery
models with the number of RC circuits ranging from one to
five and data precision ranging from 8-bit to 128-bit is shown
in Fig. 8.
1
2
3
4
5
816
64
128
0
0.5
1
1.5
2
2.5
3
0
0.5
1
1.5
2
2.5
N u m b e r
o f R C c i
r c u i t s
D a t a p r e c i s i o n ( b i t s )
Fig. 8. The execution time of models with from one to five RC circuits and
from 8-bit to 128-bit data-precision.
The computational complexity analysis demonstrated that
with more RC circuits included in the battery model, the total
execution time increases rapidly.
C. Model Selection
An accurate battery model is required in order to provide
precise battery state information, and less model complexity is
also required so that the model can be used in real-time.
However, as has demonstrated by the accuracy and the
complexity analysis, these two requirements conflict with each
other. Therefore, to select a proper model for a certain
application is actually to balance between the model accuracyand the model complexity.
The model selection is formulated as a multi-objective
optimization problem. There are two objectives: to maximize
the model accuracy and to minimize the model complexity.
There are also two constrains: the minimum accuracy
required and the maximum complexity allowed.
With J 1 representing the modeling error and J 2 representing
the total execution time, the optimization problem can be
formulated as:
1 1 2 2
* *
1 1 2 2
min ( ) ( )
st. and
m J w J m w J m
J J J J
= +
≤ ≤
, (6)
where*
1 J is the maximum modeling error allowed, and
*
2 J
is the maximum execution time allowed. w1 and w2 are
weighting factors set according to the application. A larger w1
means more emphasis on the modeling accuracy, and a larger
w2 means more emphasis on the modeling real-time
characteristic.
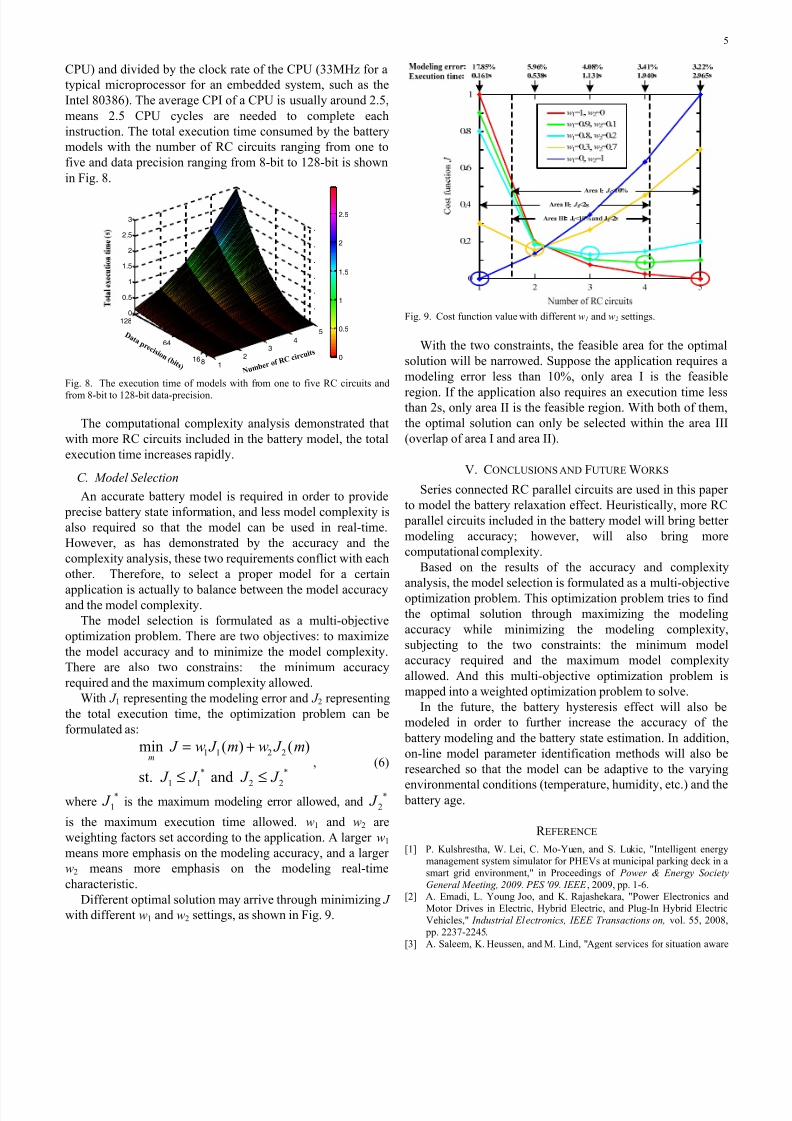
Different optimal solution may arrive through minimizing J
with different w1 and w2 settings, as shown in Fig. 9.
Fig. 9. Cost function value with different w1 and w2 settings.
With the two constraints, the feasible area for the optimal
solution will be narrowed. Suppose the application requires a
modeling error less than 10%, only area I is the feasible
region. If the application also requires an execution time lessthan 2s, only area II is the feasible region. With both of them,
the optimal solution can only be selected within the area III
(overlap of area I and area II).
V. CONCLUSIONS AND FUTURE WORKS
Series connected RC parallel circuits are used in this paper
to model the battery relaxation effect. Heuristically, more RC
parallel circuits included in the battery model will bring better
modeling accuracy; however, will also bring more
computational complexity.
Based on the results of the accuracy and complexity
analysis, the model selection is formulated as a multi-objectiveoptimization problem. This optimization problem tries to find
the optimal solution through maximizing the modeling
accuracy while minimizing the modeling complexity,
subjecting to the two constraints: the minimum model
accuracy required and the maximum model complexity
allowed. And this multi-objective optimization problem is
mapped into a weighted optimization problem to solve.
In the future, the battery hysteresis effect will also be
modeled in order to further increase the accuracy of the
battery modeling and the battery state estimation. In addition,
on-line model parameter identification methods will also be
researched so that the model can be adaptive to the varying
environmental conditions (temperature, humidity, etc.) and the battery age.
R EFERENCE
[1] P. Kulshrestha, W. Lei, C. Mo-Yuen, and S. Lukic, "Intelligent energy
management system simulator for PHEVs at municipal parking deck in a
smart grid environment," in Proceedings of Power & Energy Society
General Meeting, 2009. PES '09. IEEE , 2009, pp. 1-6.[2] A. Emadi, L. Young Joo, and K. Rajashekara, "Power Electronics and
Motor Drives in Electric, Hybrid Electric, and Plug-In Hybrid Electric
Vehicles," Industrial Electronics, IEEE Transactions on, vol. 55, 2008,
pp. 2237-2245.
[3] A. Saleem, K. Heussen, and M. Lind, "Agent services for situation aware

7/28/2019 4- Comprehensive Dynamic Battery Modeling for PHEV Applis
http://slidepdf.com/reader/full/4-comprehensive-dynamic-battery-modeling-for-phev-applis 6/6
6
control of power systems with distributed generation," in Proceedings of
Power & Energy Society General Meeting, 2009. PES '09. IEEE , 2009,
pp. 1-8.[4] X. Zhou, S. Lukic, S. Bhattacharya, and A. Huang, "Design and control
of grid-connected converter in bi-directional battery charger for Plug-in
hybrid electric vehicle application," in Proceedings of Vehicle Power and
Propulsion Conference, 2009. VPPC '09. IEEE , 2009, pp. 1716-1721.[5] P. Kulshrestha, K. Swaminathan, C. Mo-Yuen, and S. Lukic, "Evaluation
of ZigBee communication platform for controlling the charging of
PHEVs at a municipal parking deck," in Proceedings of Vehicle Power
and Propulsion Conference, 2009. VPPC '09. IEEE , 2009, pp. 1211-
1214.[6] M. E. Ropp, "Similarities between vehicle-to-grid interfaces and
photovoltaic systems," in Proceedings of Vehicle Power and Propulsion
Conference, 2009. VPPC '09. IEEE , 2009, pp. 1221-1225.
[7] S. M. Lukic, C. Jian, R. C. Bansal, F. Rodriguez, and A. Emadi, "EnergyStorage Systems for Automotive Applications," Industrial Electronics,
IEEE Transactions on, vol. 55, 2008, pp. 2258-2267.
[8] L. Yuang-Shung, W. Wei-Yen, and K. Tsung-Yuan, "Soft Computing for
Battery State-of-Charge (BSOC) Estimation in Battery String Systems,"
Industrial Electronics, IEEE Transactions on, vol. 55, 2008, pp. 229-
239.[9] M. Coleman, L. Chi Kwan, Z. Chunbo, and W. G. Hurley, "State-of-
Charge Determination From EMF Voltage Estimation: Using
Impedance, Terminal Voltage, and Current for Lead-Acid and Lithium-
Ion Batteries," Industrial Electronics, IEEE Transactions on, vol. 54,2007, pp. 2550-2557.
[10] C. M. Shepherd, "Design of Primary and Secondary Cells," Journal of
The Electrochemical Society, vol. 112, 1965, pp. 657-664.
[11] O. Tremblay, L. A. Dessaint, and A. I. Dekkiche, "A Generic Battery
Model for the Dynamic Simulation of Hybrid Electric Vehicles," inProceedings of Vehicle Power and Propulsion Conference, 2007. VPPC 2007. IEEE , 2007, pp. 284-289.
[12] S. Buller, M. Thele, R. W. A. A. De Doncker, and E. Karden,
"Impedance-based simulation models of supercapacitors and Li-ion
batteries for power electronic applicat ions," Industry Applications, IEEE
Transactions on, vol. 41, 2005, pp. 742-747.[13] X. Feng and Z. Sun, "A battery model including hysteresis for State-of-
Charge estimation in Ni-MH battery," in Proceedings of Vehicle Power
and Propulsion Conference, 2008. VPPC '08. IEEE , 2008, pp. 1-5.
[14] C. R. Gould, C. M. Bingham, D. A. Stone, and P. Bentley, "New BatteryModel and State-of-Health Determination Through Subspace Parameter
Estimation and State-Observer Techniques," Vehicular Technology,
IEEE Transactions on, vol. 58, 2009, pp. 3905-3916.
[15] C. Min and G. A. Rincon-Mora, "Accurate electrical battery modelcapable of predicting runtime and I-V performance," Energy Conversion,
IEEE Transactions on, vol. 21, 2006, pp. 504-511.
[16] T. Shuo, H. Munan, and O. Minggao, "An Experimental Study and
Nonlinear Modeling of Discharge I-V Behavior of Valve-Regulated
Lead-Acid Batteries," Energy Conversion, IEEE Transactions on, vol.24, 2009, pp. 452-458.
[17] M. Coleman, W. G. Hurley, and C. K. Lee, "An Improved Battery
Characterization Method Using a Two-Pulse Load Test," Energy
Conversion, IEEE Transactions on vol. 23, 2008, p. 6.
[18] C. Liang-Rui, L. Chuan-Sheng, and C. Jin-Jia, "Improving Phase-Locked
Battery Charger Speed by Using Resistance-Compensated Technique," Industrial Electronics, IEEE Transactions on, vol. 56, 2009, pp. 1205-
1211.
[19] P. Gaudry, A. Kruppa, and P. Zimmermann, "A gmp-based
implementation of schönhage-strassen's large integer multiplicationalgorithm," presented at the Proceedings of the 2007 international
symposium on Symbolic and algebraic computation, Waterloo, Ontario,Canada, 2007.
Related Documents











