1 3D Co-rotational Truss Formulation by Louie L. Yaw Walla Walla University November 28, 2011 key words: geometrically nonlinear analysis, 3D co-rotational truss, corotational truss, vari- ationally consis ten t, load control, displa ceme nt con trol, gener alize d displaceme nt con trol, examples, algorithms, Newton-Raphson, iterations 1 Introduction This article presents information necessary for a three-dimensional co-rotational truss formu- lation. The truss struc ture is allo we d to have arbitrarily large displaceme nts and rotat ions at the global level (so long as local truss element strains are small the results are valid). All truss eleme nts are assumed to remain linear elast ic. As with any co-rot ationa l form ulatio n three ingredients are required. They are (i) the relations between global and local variables, (ii) the angle(s) of rotation of a co-rotating frame, and (iii) a variationally consistent tangent stiffn ess matrix . The appro ach clos ely follo ws that prov ided by Cris field [2]. Eac h of the ingredients are presented below, however, first some preliminary information is developed. 2 Co-rotational Concept Let us consider the co-rotational concep t in terms of truss elemen ts. As a truss struc ture is loaded the entire tru ss def orms fro m its origi nal config ura tio n. During this proc ess an individual element potent ially does three things; it rotates, transla tes and deforms. The global displacements of the end nodes of the truss element include information about how the truss eleme nt has rotat ed, translated and deformed. The rotation and translation are rigid body motions, which may be removed from the overall motion of the truss . If this is done, all that remains are the strain causing deformations of the truss element. The strain causing local deformati ons are related to the force induced in the truss eleme nt . A co-rotationa l formulati on seeks to separ ate rigid body motions from strain producing deformat ions at the local element lev el. This is acco mplish ed by attac hing a local element reference frame (or coordinate system), whic h rotates and translates with the truss eleme nt. For 3D trusses this amount s to attachin g a co-ro tating coordinate frame to the truss such that the x-axis is always directed along the truss element (see Figure 1). With respect to this local co-rotating coordinate frame the rigid body rotations and translations are zero and only local strain produci ng defor mation s along the x-axi s remai n. 3 Preliminary Information Consider a typical truss member in its initial and current configurations as shown in Figure 1. For the truss member in its initial configuration the global nodal coordinates are defined as

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
-
13D Co-rotational Truss Formulationby Louie L. Yaw
Walla Walla UniversityNovember 28, 2011
key words: geometrically nonlinear analysis, 3D co-rotational truss, corotational truss, vari-ationally consistent, load control, displacement control, generalized displacement control,examples, algorithms, Newton-Raphson, iterations
1 Introduction
This article presents information necessary for a three-dimensional co-rotational truss formu-lation. The truss structure is allowed to have arbitrarily large displacements and rotationsat the global level (so long as local truss element strains are small the results are valid). Alltruss elements are assumed to remain linear elastic. As with any co-rotational formulationthree ingredients are required. They are (i) the relations between global and local variables,(ii) the angle(s) of rotation of a co-rotating frame, and (iii) a variationally consistent tangentstiffness matrix. The approach closely follows that provided by Crisfield [2]. Each of theingredients are presented below, however, first some preliminary information is developed.
2 Co-rotational Concept
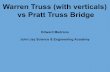
Let us consider the co-rotational concept in terms of truss elements. As a truss structureis loaded the entire truss deforms from its original configuration. During this process anindividual element potentially does three things; it rotates, translates and deforms. Theglobal displacements of the end nodes of the truss element include information about how thetruss element has rotated, translated and deformed. The rotation and translation are rigidbody motions, which may be removed from the overall motion of the truss. If this is done,all that remains are the strain causing deformations of the truss element. The strain causinglocal deformations are related to the force induced in the truss element. A co-rotationalformulation seeks to separate rigid body motions from strain producing deformations at thelocal element level. This is accomplished by attaching a local element reference frame (orcoordinate system), which rotates and translates with the truss element. For 3D trussesthis amounts to attaching a co-rotating coordinate frame to the truss such that the x-axis isalways directed along the truss element (see Figure 1). With respect to this local co-rotatingcoordinate frame the rigid body rotations and translations are zero and only local strainproducing deformations along the x-axis remain.
3 Preliminary Information
Consider a typical truss member in its initial and current configurations as shown in Figure 1.For the truss member in its initial configuration the global nodal coordinates are defined as
-
2Y
X
Z
e11
2
1
2
3
e2e3
Local coordinate systemwith e1 alongthe truss member axis
current
initial
Figure 1: Initial and current configuration for typical truss member
(X1, Y1, Z1) for node 1 and (X2, Y2, Z2) for node 2. The original length of the truss memberis
Lo =(X2 X1)2 + (Y2 Y1)2 + (Z2 Z1)2. (3.1)
For the truss member in its current configuration the global nodal coordinates are (X1 +u1, Y1+ v1, Z1+w1) for node 1 and (X2+u2, Y2+ v2, Z2+w2) for node 2, where for example,u1, v1, w1 are the global nodal displacements of node 1 in the X, Y, Z directions respectively.The current length of the truss member is
L =L21 + L
22 + L
23, (3.2)
where L1 = (X2+u2) (X1+u1), L2 = (Y2+v2) (Y1+v1) and L3 = (Z2+w2) (Z1+w1).Note that L1, L2 and L3 are simply the current distances between nodes 1 and 2 of the trussmember in the global X, Y, Z directions respectively.
4 Relation between global and local deformations
Relations between global and local deformations are necessary to calculate the local axialdeformation for a truss member. The axial deformation is used to calculate the internal forceof the truss member in local coordinates. The axial deformation of the truss member, u, iscalculated as
u = L Lo = L2 L2oL+ Lo
, (4.1)
where the last part is computationally better conditioned since the difference between L andLo is possibly small. Note that the L and Lo are calculated in terms of global variables(the initial global coordinates and the current global nodal displacements). In the case of
-
3a truss element these relations, that allow extraction of the local deformation, are quitesimple. However, in the case of beams, shells and continua, the relations are not necessarilyso simple. In addition to the above relations it is also necessary to find relations betweenlocal and global axial forces. Such relations come about naturally in the process of findingthe consistent tangent stiffness matrix and hence are left until that section.
5 Angles of rotation of the co-rotating frame
The global coordinates remain fixed throughout the co-rotational formulation. However, alocal co-rotating coordinate frame is attached to each truss member as shown in Figure 1.This co-rotating coordinate frame rotates with the truss member as the truss structuredeforms. The x axis of the local coordinate system is always defined along the currentorientation of the truss member. This local x axis is described by the coordinate directionangles of the truss in its current configuration with respect to the global axes. The coordinatedirection angles 1, 2 and 3, of the truss in the current configuration are defined by thefollowing relations
cos 1 =L1L, cos 2 =
L2L, cos 3 =
L3L. (5.1)
6 Variationally consistent tangent stiffness matrix
To find the variationally consistent tangent stiffness matrix it is necessary to find 1) varia-tional relations between local and global displacements and 2) relations between local andglobal axial forces. These two items provide the ingredients necessary to derive the varia-tionally consistent tangent stiffness matrix.
6.1 Variational relations between local and global displacements
Consider a small movement d21 = d2 d1 from the current configuration shown inFigure 2, where
d1 =
u1v1w1
d2 =
u2v2w2
. (6.1)
Using the dot product gives the components of d21 along the direction e1. That is
u = eT1 d21 =
cos 1cos 2cos 3
T
d21 (6.2)
where e1 is the unit vector lying along the line drawn between the truss nodes in the currentconfiguration. In subsequent writing c1 = cos 1, c2 = cos 2, c3 = cos 3.
Equation (6.2) may be reexpressed as follows:
u =
cos 1cos 2cos 3
T
u2 u1v2 v1w2 w1
= c1u1+c1u2c2v1+c2v2c3w1+c3w2 (6.3)
-
4Y
X
Z
d21e2
e1
u
A = Le1
A + d21 = B
1
2
Current Configuration
Bar at SmallMovement from theCurrent Configuration
i1i2
i3
Figure 2: Small movement from current configuration.
= c1u1 c2v1 c3w1 + c1u2 + c2v2 + c3w2 (6.4)= (c1,c2,c3, c1, c2, c3)p = rT p. (6.5)
The vector p contains the global displacements, ordered in the standard way.
pT = (u1, v1, w1, u2, v2, w2) (6.6)
Hence, the variation of the local strain producing displacement is
p = u = rT p. (6.7)
6.2 Relations between local and global axial forces
Using the equivalence of virtual work in the local and global coordinate systems and usingequation (6.7) it follows that
pTv qi = Niu = pTvqi = (r
T pv)T qi = p
Tv rqi, (6.8)
where a subscript v denotes virtual quantities, a subscript denotes local quantities andqi is the vector of global nodal forces for truss member i. The global nodal forces, qi, areordered like global displacement vector p. Now, since the pv are arbitrary it follows from(6.8) that
qi = qir, (6.9)
where qi = Ni = (AE/Lo)u.
-
56.3 The variationally consistent tangent stiffness matrix
Taking the variation of (6.9) gives
qi = qir+ qir = kt1p+ ktp, (6.10)
where kt1 is the standared transformed truss element tangent stiffness matrix at the globallevel and kt is the initial stress or geometric stiffness matrix.
Differentiation of qi leads to
qi = Ni =
(AE
Lou
)=
AE
Lou =
AE
LorT p. (6.11)
Substituting (6.11) into the first part of (6.10) gives
qir =
(AE
LorT p
)r =
AE
LorrT p. (6.12)
Comparing (6.12) with (6.10) it is evident that
kt1 =AE
LorrT , (6.13)
where rrT is a tensor product somtimes written as r r. This is equivalent to saying thatrrT is the square matrix with terms aij = rirj.
The geometric stiffness comes about from the 2nd term in the first part of (6.10). Takingthe variation of r yields
r = (c1,c2,c3, c1, c2, c3)T . (6.14)To determine c1, c2, c3 consider Figure 2. Observe that
B = A+ d21 and A = Le1. (6.15)
Unit vectors in the direction of A and B are
uA =A1|A| i1 +
A2|A| i2 +
A3|A| i3 and uB =
B1|B| i1 +
B2|B| i2 +
B3|B| i3. (6.16)
Recognize that the components of the unit vectors are the cosine direction angles for therespective vectors A and B. Recognize also that for infinitesimal change d21 from A toB the length relations are |A| |B| = L. Hence, during a small change from vector A tovector B the first component of uA changes to the first component of uB. This change isthe variation in cosine direction angle c1 (ie, c1). That is
c1 =B1L A1
L=
A1 + u2 u1L
A1L
=u2 u1
L. (6.17)
The last equation can be expressed in the alternative form
c1 =1
L[1 0 0 1 0 0]
u1v1w1u2v2w2
(6.18)
-
6Similarly,
c2 =v2 v1
L, (6.19)
c3 =w2 w1
L. (6.20)
The results (6.19) and (6.20) may be written in a form like (6.18) so that substitution into(6.14) gives
r =1
L
1 0 0 1 0 00 1 0 0 1 00 0 1 0 0 11 0 0 1 0 00 1 0 0 1 00 0 1 0 0 1
u1v1w1u2v2w2
. (6.21)
Hence, the 2nd term in the first part of (6.10) becomes
qir =qiL
1 0 0 1 0 00 1 0 0 1 00 0 1 0 0 11 0 0 1 0 00 1 0 0 1 00 0 1 0 0 1
u1v1w1u2v2w2
= ktp, (6.22)
where kt is the geometric stiffness matrix. Finally, using (6.10), the variationally consistenttangent stiffness matrix is
kT = kt1 + kt. (6.23)
7 Co-rotational Algorithm - Load Control
The following is a load control algorithm for performing a co-rotational truss analysis. This isan implicit formulation which uses Newton-Raphson iterations at the global level to achieveequilibrium during each incremental load step. Material nonlinearities are not presentlyincluded in the algorithm. A program implementing this algorithm has been written inMATLAB and some representative results are provided. The algorithm proceeds as follows:
1. Define/initialize variables
F = the total vector of externally applied global nodal forces Fn+1 = the current externally applied global nodal force vector N = the vector of truss axial forces, axial force in truss element i is Ni u = the vector of global nodal displacements, initially u = 0 X = the vector of nodal x coordinates in the undeformed configuration Y = the vector of nodal y coordinates in the undeformed configuration Z = the vector of nodal z coordinates in the undeformed configuration
-
7 L = the vector of truss element lengths based on current u using equation (3.2),L for truss i is Li, save the initial lengths in a vector Lo by using equation (3.1).
c = the vector of cosines for each truss element based on the current u usingequations (5.1).
K = KM +KG, the assembled global tangent stiffness matrix Ks = the modified global tangent stiffness matrix to account for supports. Rowsand columns associated with zero displacement dofs are set to zero and the diag-onal position is set to 1.
2. Start Loop over load increments (for n = 0 to ninc 1).(a) Calculate load factor = 1/ninc and incremental force vector dF = F.
(b) Calculate global stiffness matrix K based on current values of c,L,Lo and N.
(c) Modify K to account for supports and get Ks.
(d) Solve for the incremental global nodal displacements du = K1s dF
(e) Update global nodal displacements, un+1 = un + du
(f) Update the global nodal forces, Fn+1 = Fn + dF
(g) Update L and c
(h) Calculate the vector of new internal truss element axial forces Nn+1. For trusselement i the axial force is Nn+1i = (AiE/Loi) ui.
(i) Construct the vector of internal global forces Fn+1int based on Nn+1.
(j) Calculate the residual R = Fn+1int Fn+1 and modify the residual to account forthe required supports.
(k) Calculate the norm of the residual R =R R
(l) Iterate for equilibrium if necessary. Set up iteration variables.
Iteration variable = k = 0 tolerance = 106 maxiter = 100 u = 0 Ntemp = Nn+1
(m) Start Iterations while R > tolerance and k < maxiter
i. Ntemp = Nn+1
ii. Calculate the new global stiffness K
iii. Modify the global stiffness to account for supports which gives Ks
iv. Calculate the correction to un+1, which is uk+1 = uk K1s R, but notethat un+1 is not updated until all iterations are completed
v. Update L and c based on current un+1 + uk+1
vi. Calculate the vector of new internal truss element axial forces Nk+1temp. For
truss element i the axial force is (Nk+1temp)i = (AiE/Loi) ui.
-
8vii. Construct the vector of internal global forces Fn+1int based on Nk+1temp.
viii. Calculate the residual R = Fn+1int Fn+1 and modify the residual to accountfor the required supports.
ix. R =R R
x. Update iterations counter k = k + 1
(n) End of while loop iterations
3. Update variables to their final value for the current increment
Nn+1 = Ntemp un+1final = un+1(0) + u(k)
4. End Loop over load increments
8 Some Implementation DetailsCalculating internal
force vector
In the algorithms above the vector N is just a temporary vector to store the current axialforce in each member of the truss (ie, Ni = qi for truss member i). Hence, for a trussstructure with nm members the vector N is nm by 1 in size. Using the ith row from N, theinternal force vector in global coordinates for truss member i is ((6.9))
qi = fiint = Nir = qir, (8.1)
where it is understood that r is associated with truss member i like qi and qi. Then byan appropriate assembly procedure, based on truss member degrees of freedom, the globalinternal force vector, Fint (size 3nnodes 1) is constructed. That is
Fint =nm
Ai=1f iint, (8.2)
where A is the assembly operator [5] and nm is the number of truss members in the structure.
9 Example Cantilevered Space Truss With Lateral
Restraint (Load Control)
The cantilevered space truss in this example is 10 inches long, 0.2 inches wide and 0.5 inchesdeep. The truss has two top chord members and two bottom chord members. For all sidemembers (both nodes at y=0 or both nodes at y=0.2 inches) the area used is 0.05 in2. Forall other truss members the area is 0.0001 in2. All members have a modulus of elasticityof E = 29000 ksi. Setting the material properties and areas as described creates a spacetruss with the same behavior as a 2D truss with all members of cross-sectional area of0.1 in2. The nodes at the support for the cantilever are restrained in the xyz directions. Allnodes are restrained in the y direction, which forces the space truss to act like a 2D truss.
-
902
46
810
2
0
2
4
7
6
5
4
3
2
1
0
ycoordinates
Undeflected(solid) and Deflected(dashed) Truss
xcoordinates
Blue(C), Black(T)
zco
ord
inat
es
(a)
0 1 2 3 4 5 6 7 80
2
4
6
8
10
12
14
16
18
20Load vs Displacement
(in)
P (ki
ps)
3D Corotational2D Corotational
(b)
Figure 3: Cantileverd Space Truss - Load Control: (a) Truss deflected shape, (b) Load versusfree end vertical displacement (load and displacement are positive downwards).
-
10
This scenario is used to verify the current 3D formulation by comparing it to a working2D formulation [9]. The 3D truss in its original and deflected configuration is shown inFigure 3a. The load displacement results for this 3D case are compared to the 2D case inFigure 3b. For the load displacement results a total load of 20 kips is applied in 50 equalload increments with an equilibrium tolerance at each load step of 106. The 3D corotationalresults are identical to the 2D formulation.
10 Example Three Bar Space Truss (Load Control)
If the reader tries to implement the 3D corotational truss formulation the following exampleproblem given in [4] may be used as a check for correctness of results. The results areobtained using a program written in MATLAB using load control.
Consider the three bar space truss structure shown in Figure 4a. The bars are shown inthe initial configuration. The plan view dimension is L = 500 cm. The initial height of thepeak node is zo = 20 cm. The modulus of elasticity E = 20500 kN/cm
2. The cross-sectionalarea of each bar is A = 6.53 cm2. The applied load, P , is positive upwards and displacement,, is also positive upwards as shown.
If a total load of P = 4.92 kN (downwards) is applied (in 5 equal increments) tonode 4 using load control the graph of Figure 4b is obtained, where the values of load anddisplacement are plotted. Results are shown for (i) the exact solution(given below) and (ii)a co-rotational truss solution using load control.
The exact solution for P as a function of is given by Crisfield [2] for a single trussbar. In this example, essentially 3 bars are acting together, hence the Crisfield solution ismultiplied by three and is expressed as follows.
P () =3EA
L3(z2o +
3
2zo
2 +1
23). (10.1)
The equation for P () is used to plot the exact solution in Figure 4b (note that the aboveequation was derived in [2] with P and as positive upwards).
If the displacements continue this structure exibits snap through behavior. It is notpossible for a load control scheme to trace the entire equilibrium path. This is seen if themaximum load is taken to P = 8 kN as shown in Figure 4c. In this case the load controlscheme skips over the snap through path. In the following example the same truss is analyzedusing Generalized Displacement Control [8] and the equilibrium path is successfully tracedeven during snap through.
11 Example Three bar space truss (Generalized Dis-
placement Control)
Consider again the three bar space truss structure shown in Figure 4a. If a total load of P =10.67 kN (downwards) is applied to node 4 using generalized displacement control the graphof Figure 5 is obtained. Results are shown for (i) the exact solution (see equation (10.1))and (ii) a co-rotational truss solution using generalized displacement control [8]. In this
-
11
+P +
zo
Pinned Support Node
120 120
120 1
2
3
4
4
L
L
L
Top View
Front View
1 23Lcos30 Lcos30
(a)
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5Load vs Displacement
(cm)
P (kN
)
CorotationalAnalytical
(b)
0 10 20 30 40 505
0
5
10Load vs Displacement
(cm)
P (kN
)
CorotationalAnalytical
(c)
Figure 4: Three bar space truss: (a) initial configuration; (b) load P as a nonlinear functionof displacement (load and displacement are plotted as positive downwards); (c) load Pas a nonlinear function of displacement , load control does not trace the snap throughequilibrium path.
-
12
0 10 20 30 40 506
4
2
0
2
4
6
8
10
12Load vs Displacement
(cm)P
(kN)
CorotationalAnalytical
Figure 5: Three bar space truss: results for downward applied load P as a nonlinear functionof displacement using Generalized Displacement Control (load and displacement are plottedas positive downwards).
case the entire equilibrium path is successfully followed. This demonstrates the importanceof having a robust control scheme when solving geometrically nonlinear problems that maybe subject to snap through and possibly snap back. Arc length control[1, 6, 2] is anotherpopular method for following complicated equilibrium paths.
12 Example Star Dome Space Truss
For problems of snap back and equilibrium path tracing (see Figure 7) methods such asgeneralized displacement control (see Yang et al [8]) or arc length control (see Crisfield [2] orClarke and Hancock [1]) will be necessary. An excellent summary of many of the methods isgiven in the work by McGuire et al [6]. The following example uses generalized displacementcontrol.
A common benchmark problem for space trusses is the star dome. This problem isdiscussed by Yang et al [8], Greco and Venturini [4], Wriggers [7], Crisfield [3] and manyothers. The geometry for the truss is shown in Figure 6. The results are obtained byusing the following properties for all truss members: A = 1cm2, E = 1kN/cm2. Theoriginal and deflected shapes are shown in Figure 7a. The node 1, load versus verticaldisplacement, equilibrium path determined by the present corotational procedure is tracedusing generalized displacement control and is compared to the solution by Wriggers [7] inFigure 7b. It is evident from the figure that the corotational procedure is in excellentagreement with the solution provided by Wriggers. Figures 7cd show results for the sameloading but for horizontal and vertical displacements at node 2 of the star dome. Theseresults are in agreement with results which are given in [8].
-
13
xyz free node
xyz reaction node
R=50 cm
R=25 cm
Top View Elevation View
43.3 cm 43.3 cm
2 cm
25 cm25 cm
6.216 cm
P
1 2x
y zx
Figure 6: Model Geometry for Star Dome Space Truss
13 Example Lateral Torsional Buckling of Space Truss
Beam
As a final example a cantilevered space truss beam is loaded with a vertical downward loadat its free end until lateral torsional buckling takes place. The results are obtained by usingthe following properties for all truss members: A = 1cm2, E = 1kN/cm2. The final deflectedshape of the cantilevered truss is shown in Figure 8a. The plot of load versus free end verticaldisplacement is shown in Figure 8b. The behavior is as expected. As the load is increasefrom zero the cantilever behaves in a linear fashion until lateral torsional buckling occurs anda loss of stiffness takes place. After further loading the cantilever is displaced downwardsuntil it starts to stiffen again due to tension in the truss. This is as expected and illustratesthe ability of the 3D corotational formulation to capture 3D buckling behavior.
14 Conclusion
A derivation and explanation of the ingredients of a 3D co-rotational truss formulation, in asmall strain setting, is provided. The results of the formulation are compared to represen-tative benchmark problems and are found to be in excellent agreement. A 3D corotationaltruss formulation is an effective technique for solving geometrically nonlinear problems.
References
[1] M. J. Clarke and G. J. Hancock. A study of incremental-iterative strategies for non-linearanalyses. International Journal for Numerical Methods in Engineering, 29:13651391,1990.
[2] M. A. Crisfield. Non-linear Finite Element Analysis of Solids and Structures Vol 1.John Wiley & Sons Ltd., Chichester, England, 1991.
-
14
500
50
0
20
40
60
80
10015
10
5
0
5
10
xcoordinates
Undeflected(solid) and Deflected(dashed) Truss
Blue(C), Black(T)
ycoordinates
zcoord
inat
es
(a)
0 2 4 6 8 10 12 14 16 18 20100
50
0
50
100
150Load vs Displacement
(cm)
104 P
/EA
CorotationalWriggers
A
(b)
0.03 0.02 0.01 0 0.01 0.02 0.03 0.043
2
1
0
1
2
3
4Load vs Displacement
(cm)
104 P
/EA
Corotational
(c)
0.15 0.1 0.05 0 0.05 0.13
2
1
0
1
2
3
4Load vs Displacement
(cm)
104 P
/EA
Corotational
(d)
Figure 7: Star Dome Space Truss Analyzed By Generalized Displacement Control: (a) Trussdeflected shape corresponding to point A on the load versus displacement plot, (b) Loadversus node 1 vertical displacement (load and displacement are positive downwards), (c) Loadversus node 2 horizontal displacement, (d) Load versus node 2 vertical displacement (loadand displacement are positive downwards).
-
15
01
23
45
67
89
104
32
10
12
6
5
4
3
2
1
0
1
ycoordinates
Undeflected(solid) and Deflected(dashed) Truss
xcoordinates
Blue(C), Black(T)
zco
ord
inat
es
(a)
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
3.5x 104 Load vs Displacement
(cm)
P (kN
)
Corotational
(b)
Figure 8: Lateral Torsional Bucklin of a cantilevered space truss: (a) Truss deflected shape,(b) Load versus free end vertical displacement (load and displacement are positive down-wards).
-
16
[3] M. A. Crisfield. Non-linear Finite Element Analysis of Solids and Structures Vol 2.John Wiley & Sons Ltd., Chichester, England, 1997.
[4] M. Greco and W. S. Venturini. Stability analysis of three-dimensional trusses. LatinAmerican Journal of Solids and Structures, 3:325344, 2006.
[5] T. J. R. Hughes. The Finite Element Method - Linear Static and Dynamic Finite ElementAnalysis. Dover, Mineola, NY, 1st edition, 2000.
[6] W. McGuire, R. H. Gallagher, and R. D. Ziemian. Matrix structural analysis. Wiley,New York, 2nd edition, 2000.
[7] P. Wriggers. Nonlinear Finite Element Methods. Springer-Verlag, Berlin, 2008.
[8] Y. B. Yang, L. J. Leu, and Judy P. Yang. Key considerations in tracing the postbucklingresponse of structures with multi winding loops. Mechanics of Advanced Materials andStructures, 14(3):175189, March 2007.
[9] L. L. Yaw. 2D co-rotational truss formulation. Online Web Document, http: // people.wallawalla. edu/ ~ louie. yaw/ Co-rotational_ docs/ 2Dcorot_ truss. pdf , April2009.
Related Documents