Section Line 3D Shape Point Cloud Analysis Judge Line Leg Length (upper sheet) Leg Length (lower sheet) Absolute Coordinate z x y Accurate and Automated Visual Inspection for Weld Beads 3D Weld Inspection System Eye Opening “Absolute Quality” The 3D weld inspection system can be used for various types of inspections, not only welding inspections, and measurements. Measurement between points Sealant (adhesive) coated quantity measurement 3D shape inspection Section line 3D shape volumetric measurement Contact us to inquire about applicable systems. ■ 3D Camera Head Dimensions Diagram Standard type 3D camera head 3D camera head Camera Camera Line laser Line laser Guide laser Guide laser Workpiece or inspection region Workpiece or inspection region Long-distance type ■ 3D Camera Head Specifications Only representative models are stated. Model CVS-13010 (standard) CVS-13015 (high-accuracy) CVS-13030 (long distance) Measurement range Measurement center distance (mm) Distance resolution (μm) Measurement value (mm) Width resolution (μm) Inspection speed 0.3mm pitch (mm/sec) Laser class Class 2 Class 2 Class 3R Size Weight Cable from the 3D camera head can be selected out of 5, 10, 15, 20, and 25m. Case of CVS-13010 ■ System Configuration Standard type 3D camera head 3D camera head Camera signal cable Laser control cable Camera signal cable Laser control cable Monitor Monitor Monitor (Prepared by the customer) Measurement controller Measurement controller Measurement controller Measurement controller Database controller Database controller External device interface External device interface External device interface External device interface Control cabinet Control cabinet Robot controller (Prepared by the customer) Robot controller (Prepared by the customer) Robot controller (Prepared by the customer) Robot controller (Prepared by the customer) Field networks Field networks Field networks Field networks Field networks Field networks Robot (Prepared by the customer) Robot (Prepared by the customer) Robot (Prepared by the customer) Robot (Prepared by the customer) Equipment side PLC (Prepared by the customer) Equipment side display (Prepared by the customer) Control cabinet Control cabinet Compact type ■ System Specifications Type Standard type Compact type Robot manufacturer Measurement controller Number of units OS OS Max. 2 units 1 unit Database controller Storage External device interface Robot Equipment Control cabinet Operating device Assembled (monitor,keyboard,mouse) Separate (monitor,keyboard,mouse) Power source Size (mm) Weight (kg) *1 This may vary depending on the number of controllers. *Specifications are subject to change without notice. [email protected] https://www.coretec.co.jp/ URL E-mail is the brand logo of CORETEC's NB brand. Head Office / Factory Chubu Office Kanto Office 500 Akahama, Soja-shi, Okayama, 719-1121 Tel. +81 866-94-9016 Fax +81 866-94-1178 2-14 Akebono-cho, Toyota-shi, Aichi, 471-0835 Tel. +81 565-71-9000 Fax +81 565-71-9010 Fuji Building 3rd floor, 2-7-4 Shinyokohama, Kohoku-ku, Yokohama-shi, Kanagawa, 222-0033 Tel. +81 45-442-9088 Fax +81 45-442-9089 Sample Test Requests Received Any Time Tel. +81 866-94-9016 The contact person is Kanehira in the Head Office Sales Division. If you wish to receive more detailed information or perform a sample test, use the phone number below to contact us. CVS01-2002E 150 62 131 85 50 258 269 134 295 50 20 20 66 85 85±20 85±10 295±20 23 15 24 51 35 51 66 44 67 170 112 170 (D×H×W)(mm) 50×131×150 50×131×150 50×134×258 (kg) 1.0 1.0 1.5 Ethernet Ethernet Ethernet Ethernet DAIHEN DENSO FANUC Panasonic YASKAWA Win10 Pro J Win10 Pro E HDD : 2TB×2 NAS: 12,24, 36,48TB CC-Link EthernetIP EtherCAT FL-Net CC-Link IE Field EtherCAT AC100V φ1 2kVA W600 H800 D680 270 100 AC200V φ3 5kVA *1 W600 H1700 D630 Win10 Pro J Win10 Pro E

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

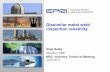
Section Line
3D Shape
Point Cloud Analysis
Judge Line
Leg Length (upper sheet)
Leg Length (lower sheet)
Absolute Coordinate
z
xy
Accurate and Automated Visual Inspection for Weld Beads
3D Weld Inspection System
Eye Opening “Absolute Quality”
The 3D weld inspection system can be used for various types of inspections, not only welding inspections, and measurements.
Measurement between points
Sealant (adhesive) coated quantity measurement
3D shape inspection
Section line
3D shape volumetricmeasurement
Contact us to inquire about applicable systems.
■3D Camera Head Dimensions DiagramStandard type
3D camera head
3D camera head
Camera
Camera
Line laserLine laserGuide laser
Guide laserWorkpiece or inspection region
Workpiece or inspection region
Long-distance type
■3D Camera Head Specifications Only representative models are stated.
Model
CVS-13010 (standard)
CVS-13015 (high-accuracy)
CVS-13030 (long distance)
Measurement rangeMeasurement center
distance (mm)Distance resolution
(μm)Measurement value
(mm)Width resolution
(μm)
Inspection speed0.3mm pitch (mm/sec)
Laserclass
Class 2
Class 2
Class 3R
Size Weight
Cable from the 3D camera head can be selected out of 5, 10, 15, 20, and 25m. Case of CVS-13010
■System ConfigurationStandard type
3D camera head3D camera headCamera signal cable
Laser control cable
Camera signal cable
Laser control cableMonitorMonitor
Monitor(Prepared by the customer)
Measurement controllerMeasurement controllerMeasurement controllerMeasurement controller
Database controllerDatabase controller
External device interfaceExternal device interfaceExternal device interfaceExternal device interface
Control cabinet
Control cabinet
Robot controller(Prepared by the customer)
Robot controller(Prepared by the customer) Robot controller
(Prepared by the customer)Robot controller
(Prepared by the customer)
Field networksField networksField networksField networks
Field networksField networks
Robot(Prepared by the customer)
Robot(Prepared by the customer)
Robot(Prepared by the customer)
Robot(Prepared by the customer)Equipment side PLC
(Prepared by the customer)Equipment side display(Prepared by the customer)
Control cabinet
Control cabinet
Compact type
■System Specifications
Type
Standard type
Compact type
Robot manufacturer
Measurement controller
Number of units OS OS
Max. 2 units
1 unit
Database controller
Storage
External device interface
Robot Equipment
Control cabinet
Operating device
Assembled(monitor,keyboard,mouse)
Separate(monitor,keyboard,mouse)
Power source Size (mm) Weight (kg)
*1 This may vary depending on the number of controllers.
Welded part
Workpiece for inspection
Welded part
Scan direction
Welded part
Scan direction
*Specifications are subject to change without notice.
[email protected]://www.coretec.co.jp/URL E-mail
is the brand logo of CORETEC's NB brand.
Head Office/Factory
Chubu Office
Kanto Office
500 Akahama, Soja-shi, Okayama, 719-1121Tel. +81 866-94-9016 Fax +81 866-94-11782-14 Akebono-cho, Toyota-shi, Aichi, 471-0835Tel. +81 565-71-9000 Fax +81 565-71-9010Fuji Building 3rd floor, 2-7-4 Shinyokohama, Kohoku-ku, Yokohama-shi, Kanagawa, 222-0033Tel. +81 45-442-9088 Fax +81 45-442-9089
Sample Test Requests Received Any TimeTel. +81 866-94-9016 The contact person is Kanehira in the Head Office Sales Division.
If you wish to receive more detailed information or perform a sample test, use the phone number below to contact us.
CVS01-2002E
150
6213
1
85
50 258
269
134
295
50
2020
66
8585±20
85±10
295±20
23
15
24
51
35
51
66
44
67
170
112
170
(D×H×W)(mm)
50×131×150
50×131×150
50×134×258
(kg)
1.0
1.0
1.5
EthernetEthernetEthernetEthernet
DAIHENDENSOFANUC
PanasonicYASKAWA
Win10 Pro JWin10 Pro E
HDD:2TB×2NAS:12,24, 36,48TB
CC-LinkEthernetIPEtherCAT
FL-NetCC-Link IE Field
EtherCAT
AC100V φ1 2kVA
W600H800D680
270
100
AC200V φ3 5kVA *1
W600H1700D630Win10 Pro J
Win10 Pro E

OK
OK
OK
OK
OK
3D Weld Inspection System
Monitor
Measurement controllerMeasurement controller
Database controller
External device interfaceExternal device interface
Robot controller(Prepared by the customer) Robot controller
(Prepared by the customer)
Field networksField networks
Field networks
Robot(Prepared by the customer)
Robot(Prepared by the customer)
High Levels of Quality Control Made Possible throughAutomation of Weld Bead Inspections
■Fully automated from scanning through to 3D analysis and pass/fail judgment
Scanning with a 3D camera Creation of the 3D shape Drawing of a judge line and cross-sectional analysis
Automatic pass/fail judgment (conceptual image)
●An accurate 3D shape is created based on combining robot coordinate information and scanned data.●Since a judge line is drawn on after the 3D shape is acquired, analysis on optional section lines is possible.●Pass or fail is judged based on absolute values (dimensions) instead of relative comparison.
■Judgment items can be set according to various inspections.■Data can be stored and output, enabling traceability requirements to also be met.
There are more than 20 inspection items, such as leg length and weld length, enabling various needs to be responded to.
Arc welding inspection items
Measurement of weld length
Weld toe angle (upper plate, lower plate)
Alignment
Undercut upper platestep difference
Burn-through (depression)
Upper plate leg length, lower plate leg length
Throat depth
Welding start position
Burn-through (perforation)
Protrusion
Weld width
Excessive reinforcement
No-bead length
Burn-through (minute)
Pit
Weld height
Bead position deviation
Undercut
Burn-through(With upper plate bead)
Spatter
Tailored blank inspection items
Sink mark
Width
Pit (hole)
Step difference
Laser welding (C type) inspection itemsDisregard
Depth
DepthDepth
Weld sink markPlate thickness
Burn-through
Weld length Gap
Width
Weld width
Poor weld
Mispositioned
User-friendly screen operations. With a diverse parameter setting feature, users can freely select judgment items.Bead unit setting screen Analysis screen Judgment screen Composition processing screen
CORETEC’s unique innovative technology for realizing “Absolute Quality”
Accurate 3D shape creation for accurate analysis of welded partsCORETEC’s “3D weld inspection system” constantly acquires robot coordinate information, making it possible to acquire accurate 3D shapes regardless of changes in the robot motion and posture. It can also easily superimpose multiple 3D shapes.
Camera
Scan speedUniformvelocity
Uniformvelocity
Welded partWelded part
Workpiece for inspectionWorkpiece for inspection
CORETEC
3D shape
3D shape
Accurate 3D shape can be acquired.
Company A
Changes in scanning speed cause deviations to appear.
■Equipped with 3D composition featureSince each 3D shape has robot coordinate information, multiple 3D shapes can be easily composed.
Posture1 Posture2 Posture3
Composition1 Composition2
Patented analysis feature that doesn’t depend on scan directionThe “3D weld inspection system” conducts cross-sectional analysis by drawing a judge line after the 3D shape is acquired. Accordingly, since there is no need to accurately trace the welded part or force the robot to conduct complicated movements, merits such as easy teaching and shortened cycle time are realized.
CORETEC’s “3D weld inspection system” Patent: No. 5758090
Camera
Camera
Welded partWelded part
Scan directionScan direction
Welded partWelded part
Scan directionScan direction
Judge lineSection line
Section line
3D shape
3D shape
Since a judge line (route line) is drawn on after the 3D shape is acquired, analysis can be conducted on optional section lines.Teaching is also simple, regardless of the scan direction. The generated 3D shape is easy to recognize as it is the same as the actual shape.
Company A’s inspection system (example)
Since the section lines are set during scanning, it is necessary to align the camera direction and posture with the route lines on the welded part, thus making the teaching more complicated.Moreover, if curves and spiral shapes are included, not only will the 3D shape differ from the actual shape, but scan time will be impacted.
EthernetEthernet
Slowdown
Related Documents