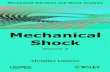
1 30 October 2019 Kidoguchi, Kenneth 2 2 0 dx dx m c kx dt dt ⇒ + + = 2 2 R S F F F dx dx m c kx dt dt = + =− − , ^ 0 R dx F cv c c c dt =− =− ∈ > Assuming a frictional force proportional to the speed of the mass: where c is called the damping constant. If there are no additional external forces, F E = 0, then: , ^ 0 S F kx k k =− ∈ > k m Equilibrium Position @ x = 0 x > 0 x < 0 For an ideal Hooke's Law spring, the force exerted on the mass, m, by the spring is: where k is called the spring constant. §3.4: Mechanical Vibrations A Mass-Spring System

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

130 October 2019 Kidoguchi, Kenneth
2
2 0d x dxm c kxdtdt
⇒ + + =2
2
R SF F F
d x dxm c kxdtdt
= +
= − −
, ^ 0RdxF cv c c cdt
= − = − ∈ >
Assuming a frictional force proportional to the speed of the mass:
where c is called the damping constant.If there are no additional external forces, FE = 0, then:
, ^ 0SF kx k k= − ∈ >
km
Equilibrium Position @ x = 0
x > 0x < 0For an ideal Hooke's Law spring, the force exerted on the mass, m, by the spring is:
where k is called the spring constant.
§3.4: Mechanical VibrationsA Mass-Spring System

30 October 2019 Kidoguchi, Kenneth2
22 20 02
c d x c dxx x x xm m dtdt
+ +ω ≡ + +ω
N.B.: A dot over the variable, “dot notation” , means we are considering a time dependent dynamic variable and differentiating with respect to time.
20
km
⇐ ω =2
202 0d x c dx x
m dtdt+ +ω =
2
2 0d x c dx k xm dt mdt
+ + =
2
2 0d x dxm c kxdtdt
+ + = km
Equilibrium Position @ x = 0
x > 0x < 0
§3.4: Mechanical VibrationsA Mass-Spring System

30 October 2019 3 Kidoguchi, Kenneth
L
-mg
0θ >0θ <
Let s be the distance travelled by the mass on a circular arc and assume a damping force proportional to v = ds/dt, we have:
Consider a simple pendulum with a mass m attached to a massless rod of length L.
R GF F F= +
§3.4: Mechanical VibrationsA Simple Pendulum

30 October 2019 5 Kidoguchi, Kenneth
L
-mgss = Lθ
sin( )mg− θ
cos( )mg− θ
0θ >0θ <
θ
2
2 sin( ) 0d s dsm c mgdt dt
+ + θ =
§3.4: Mechanical VibrationsA Simple Pendulum

30 October 2019 6 Kidoguchi, Kenneth
L
-mgss = Lθ
sin( )mg− θ
cos( )mg− θ
0θ >0θ <
θ0 0 2g LT
L gω = ⇒ = π
2
2
2202
sin( ) 0
0
d c d gdt m dt L
d c ddt m dt
θ θ+ + θ =
θ θ+ +ω θ =
§3.4: Mechanical VibrationsA Simple Pendulum

830 October 2019 Kidoguchi, Kenneth
2 2
0
0
0
0
amplitude
angular frequency /phase angle arctan( / )period 2 /frequency 1/ /(2 )time lag /
C A B
k mB A
Tf T
= +
ω =
α =
= π ω
ν = = = ω π
δ = α ω
Where:
( ) ( )( )0 0 00
cos cos cosC t C t C t α
= ω −α = ω − = ω −δ ω
km
Equilibrium Position @ x = 0
x > 0x < 0
( ) ( )0 0( ) cos sinx t A t B t= ω + ω
With general solution:
2202 0d x x
dt+ω =
If the system is undamped, c = 0, so:
§3.4: Mechanical VibrationsSimple Harmonic Motion – Free Undamped Motion

Kidoguchi, Kenneth30 October 2019 9
phase trajectory
akaphase
portrait
1sin2 2 2
t π π = − −
t-domain
0
amplitude 1angular frequency / 2phase angle / 4period 4frequency 1/ 4time lag 1/ 2
C
Tf
=ω = πα = π=
ν = =δ =
( )( )0 0( ) ( ) sinv t x t C t= = − ω ω −δ
1cos2 2
t π = −
( )( )0( ) cosx t C t= ω −δUndamped system response description:
3.4: Mechanical VibrationsSimple Harmonic Motion – Free Undamped Motion

30 October 2019 Kidoguchi, Kenneth10
2202 2
c crm m
= − ± −ω
which requires: Eigenvalues
Characteristic polynomial
2 20 0rtcr r e
m + +ω =
Upon substitution:
or: 2 20 0cr r
m+ +ω =
2
( )
( )
( )
rt
rt
rt
x t e
x t re
x t r e
=
=
=
Assume a solution of the form:
20 00, where / natural (angular) frequencycx x x k m
m+ +ω = ω = = Given:
§3.4: Mechanical VibrationsFree Damped Motion – Eigenvalue Computation

30 October 2019 Kidoguchi, Kenneth11
1 21 2( )
( )
r t r tx t a e a edxv tdt
= +
=
phase trajectory
akaphase
portrait
t-domain
/55 t te e− −= +
The system is said to be overdampedwith general solution:
22
1 0
22
2 0
2 2
2 2
c crm m
c crm m
= − + −ω
= − − −ω
220If , eigenvalues are real and distinct.
2cm
> ω
§3.4: Mechanical VibrationsDistinct Real Eigenvalues – Overdamped System

30 October 2019 12 Kidoguchi, Kenneth
2202 2
c crm m
= − + −ω
220If , eigenvalues are complex.
2cm
< ω
§3.4: Mechanical VibrationsComplex Eigenvalues – Underdamped System

30 October 2019 Kidoguchi, Kenneth13
2
1 1 00
, where 12 2c cr im m
= − + ω ω =ω − ω
220
220
0
2
00
2 2
12 2
12 2
c crm m
c cm m
c cim m
= − + −ω
= − + −ω − ω
= − + ω − ω
220If , eigenvalues are complex.
2cm
< ω
§3.4: Mechanical VibrationsComplex Eigenvalues – Underdamped System

30 October 2019 Kidoguchi, Kenneth14
phase trajectory
akaphase
portrait
t-domain
( ) dxv t xdt
= =
/2 1cos2 2
te t− π = −
( ) ( )
( ) ( )( )
2 21 1 2 1
21 1 2 1
( ) cos sin
cos sin
c ct tm m
c tm
x t a e t a e t
e a t a t
− −
−
= ω + ω
= ω + ω
The system is said to be underdampedwith general solution:
2
1 00
where 12
cm
ω =ω − ω
12cr im
= − + ω
220Hence, if ,
2cm
< ω
§3.4: Mechanical VibrationsComplex Eigenvalues – Underdamped System

30 October 2019 Kidoguchi, Kenneth15
1 2( )
( )
rt rtx t a e a t edxv t xdt
= +
= =
The system is said to be critically damped with general solution:
220If , we have one distinct eigenvalue,
2 2c cr -m m
= ω =
§3.4: Mechanical VibrationsRepeated Eigenvalues – Critically Damped System

30 October 2019 Kidoguchi, Kenneth16
) 2 0, (0) 2, (0) (0) 0d x x x x x v+ + = = = =
) 0, (0) 2, (0) (0) 0c x x x x v+ = = = =
) 4 13 0, (0) 6, (0) (0) 0b x x x x x v+ + = = = =
) 7 10 0, (0) 2, (0) (0) 13a x x x x x v+ + = = = = −
• find x(t), the solution to the IVP and dx/dt and• sketch graphs of x(t) and dx/dt in the t-domain and in the phase plane.
For each of the following initial value problems (IVPs):
§3.4: Mechanical VibrationsHarmonic Oscillator – Example IVPs

30 October 2019 17 Kidoguchi, Kenneth
) 7 10 0, (0) 2, (0) (0) 13a x x x x x v+ + = = = = −
§3.4: Mechanical VibrationsHarmonic Oscillator– Example IVPs

30 October 2019 18 Kidoguchi, Kenneth

30 October 2019 19 Kidoguchi, Kenneth
) 4 13 0, (0) 6, (0) (0) 0b x x x x x v+ + = = = =
§3.4: Mechanical VibrationsHarmonic Oscillator– Example IVPs

30 October 2019 20 Kidoguchi, Kenneth
§3.4: Mechanical VibrationsHarmonic Oscillator– Example IVPs

30 October 2019 21 Kidoguchi, Kenneth

30 October 2019 22 Kidoguchi, Kenneth
) 0, (0) 2, (0) (0) 0c x x x x v+ = = = =
§3.4: Mechanical VibrationsHarmonic Oscillator– Example IVPs

30 October 2019 23 Kidoguchi, Kenneth

30 October 2019 24 Kidoguchi, Kenneth

30 October 2019 25 Kidoguchi, Kenneth
) 2 0, (0) 2, (0) (0) 0d x x x x x v+ + = = = =
§3.4: Mechanical VibrationsHarmonic Oscillator– Example IVPs

30 October 2019 26 Kidoguchi, Kenneth

30 October 2019 Kidoguchi, Kenneth27
Category Eigenvalues Parameters Decay Phase Trajectory
Undamped imaginary c = 0 no decay ellipse
Underdamped complex c2 – 4mk < 0 e-ct/(2m) spiral to origin
Overdamped real c2 – 4mk > 0 e-ct/(2m) decay to origin
Critically damped repeated c2 – 4mk = 0 e-rt decay to origin
km
Equilibrium Position @ x = 0
x > 0x < 0
where: m > 0, k > 0, and c > 0 are real, constants.
0m x c x k x+ + =
The damped harmonic oscillator model:
§3.4: Mechanical Vibrations Mechanical Vibrations – Response Summary

30 October 2019 28 Kidoguchi, Kenneth
0m x c x k x+ + = The damped harmonic oscillator model:
§3.4: Mechanical Vibrations Mechanical Vibrations – Response Summary Revisited
Related Documents