Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected]) 303 6.3 Dynamic Seals 6.3.1 Classification of Seals Seals are broadly classified as liquid and gas seals according to the working fluid used in the system. The most common working fluids are water, air, nitrogen, Triflurobromomethane (CBrF 3 ), liquid oxygen, liquid hydrogen etc. In addition, they can be categorized as static and dynamic seals. Static seals are used where the two surfaces do not move relative to one another. Gasket-type seals are static seals (Fig. 1). Dynamic seals are used where sealing takes place between two surfaces having relative movement viz. rotary, reciprocating, and oscillating. The main focus of the present paper is on rotary seals. It has wide variety of applications in high-speed, high-pressure and cryogenic temperature conditions of aviation and space industries such as in turbine stages, turbo-pumps, compressors, gear boxes, etc. Rotary seals can be subdivided into two main categories as clearance seals and contact seals. Clearance seals are circumferential non-contacting seals (Fig. 2a). In contact seals, the contact is formed by positive pressure, while in the case of clearance seals; they operate with positive clearance (no rubbing contact). The most commonly used material for dynamic seals (especially for rotary seals) are stainless steel, bronze, aluminium, nickel-based alloys, Polytetrafluroethane etc. Fig. 2(a) shows a typical rotary seal with the clearance exaggerated. Rotary seals based on geometry can be classified as (i) Ungrooved plain seals (or Smooth annular seals): (a) Straight (Fig. 2b), (b) Tapered (Fig. 2c) and (c) Stepped (Fig. 2d). In geometry they are similar to journal bearings but the clearance/radius ratio is as low as two times and as high as ten times (or more) large to avoid rotor/stator contact. (ii) Grooved/Roughened surface seals: (a) Porous surface seals (b) Labyrinth seals (Figs. 3(a-d)), (c) Helically grooved / Screw seals (d) Circular hole or triangular patterns seals and (e) Honeycomb patterns seals (Fig. 4). These seals are used in centrifugal and axial compressors and pumps and in turbines. Different internal surface patterns of seals are shown in Fig. 5. (iii) Contact seals: (a) Brush seals (Fig. 6a) (b) Face seals and (c) Lip seals (Fig. 6b)) Because of rubbing, these seals are used commonly in low speed pumps, or where the working fluid can act as a coolant. Contact seals provide much lower leakage rates than either of non-contact seals (Adams, 1987), however, the latter can operate at very high speed and pressure conditions. (iv) Floating-ring oil seals: The ring whirls or vibrates with the rotor in the lubricating oil, but does not spin. They are used in high-pressure multi-stage centrifugal compressors.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
303
6.3 Dynamic Seals
6.3.1 Classification of Seals
Seals are broadly classified as liquid and gas seals according to the working fluid used in the system.
The most common working fluids are water, air, nitrogen, Triflurobromomethane (CBrF 3 ), liquid
oxygen, liquid hydrogen etc. In addition, they can be categorized as static and dynamic seals. Static
seals are used where the two surfaces do not move relative to one another. Gasket-type seals are static
seals (Fig. 1). Dynamic seals are used where sealing takes place between two surfaces having relative
movement viz. rotary, reciprocating, and oscillating. The main focus of the present paper is on rotary
seals. It has wide variety of applications in high-speed, high-pressure and cryogenic temperature
conditions of aviation and space industries such as in turbine stages, turbo-pumps, compressors, gear
boxes, etc. Rotary seals can be subdivided into two main categories as clearance seals and contact
seals. Clearance seals are circumferential non-contacting seals (Fig. 2a). In contact seals, the contact is
formed by positive pressure, while in the case of clearance seals; they operate with positive clearance
(no rubbing contact). The most commonly used material for dynamic seals (especially for rotary seals)
are stainless steel, bronze, aluminium, nickel-based alloys, Polytetrafluroethane etc. Fig. 2(a) shows a
typical rotary seal with the clearance exaggerated. Rotary seals based on geometry can be classified as
(i) Ungrooved plain seals (or Smooth annular seals): (a) Straight (Fig. 2b), (b) Tapered (Fig. 2c) and
(c) Stepped (Fig. 2d). In geometry they are similar to journal bearings but the clearance/radius
ratio is as low as two times and as high as ten times (or more) large to avoid rotor/stator contact.
(ii) Grooved/Roughened surface seals: (a) Porous surface seals (b) Labyrinth seals (Figs. 3(a-d)), (c)
Helically grooved / Screw seals (d) Circular hole or triangular patterns seals and (e) Honeycomb
patterns seals (Fig. 4). These seals are used in centrifugal and axial compressors and pumps and in
turbines. Different internal surface patterns of seals are shown in Fig. 5.
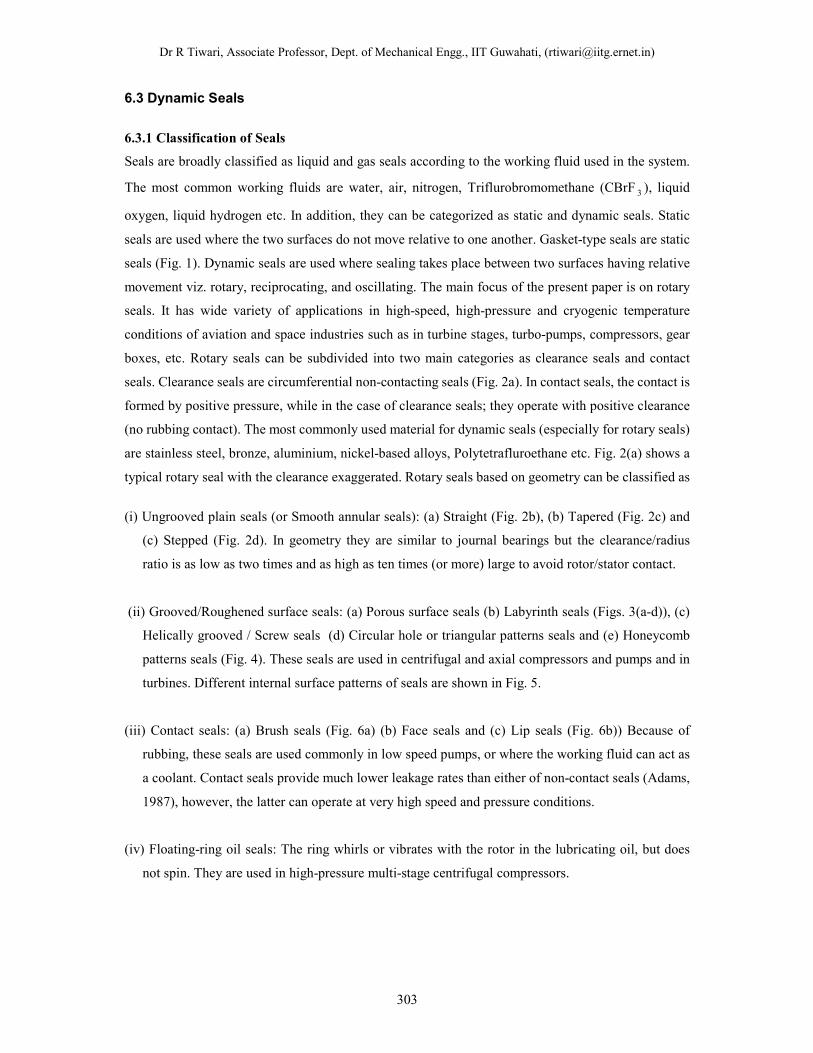
(iii) Contact seals: (a) Brush seals (Fig. 6a) (b) Face seals and (c) Lip seals (Fig. 6b)) Because of
rubbing, these seals are used commonly in low speed pumps, or where the working fluid can act as
a coolant. Contact seals provide much lower leakage rates than either of non-contact seals (Adams,
1987), however, the latter can operate at very high speed and pressure conditions.
(iv) Floating-ring oil seals: The ring whirls or vibrates with the rotor in the lubricating oil, but does
not spin. They are used in high-pressure multi-stage centrifugal compressors.

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
304
High pressure fluid
Hydraulic end thrust
GasketCompressive load
Fig. 1. Static seal (gasket)
Highpressure
Lowpressure
Flow
SealRotor
Fig. 2(a). Rotor-seal assembly
Flow
Seal
Rotor
Fig. 2(b). Straight annular seal
Flow
Seal
Rotor
Fig. 2(c). Tapered annular seal (converging)
Flow
Seal
Rotor
Fig. 2(d). Stepped annular seal
Expandingcavity
Chalk vaneGroovedepth
Fig. 3(a). Labyrinth seal (teeth-on-stator)
Stator
Rotor
Labyrinthseal
Fig. 3(b) Labyrinth seal (teeth-on-rotor)
Rotor
Stator
LabyrinthFlow
Fig. 3(c) Labyrinth seal (teeth-on-stator and teeth-on-rotor) axial flow type

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
305
Labyrinthseal
Stator
Impellor(Rotor)
Leakage
Fig. 3(d) Labyrinth seal radial flow type
Cell depth Cell size
Honeycombhousing
Shaft
Fig. 4. Honeycomb seal
Unwrap(a) Plain seal
(c) Labyrinth seal
(d) Helically grooved seal
Unwrap
(e) Honeycomb seal
(f) Hole pattern roughness seal
(g) Triangular pattern roughness seal
(b) Plain seal with porous material
Fig. 5. Different internal surface patterns on seals
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
306
Brush
Leak flow
Fig. 6(a). Brush seal
Metal stiffner
Rubber lipFluid tobe sealed
Garter spring
Fig. 6(b). Lip seal
6.3.2 Theoretical Estimation of Dynamic Coefficients of Seals
In this chapter, basic governing equations to obtain dynamic coefficients of smooth annular turbulent
seals (smooth seals) are presented. Dynamic coefficients are calculated from the approximate solution
of the bulk flow theory for the configuration of the test rig. Effects of rotor speeds, seal dimensions
and operation conditions on these dynamic coefficients are also presented and discussed in detail.
Basic governing equations and solution
In an annular seal, flows are usually turbulent because of high Reynolds numbers at which they
operate. Black and his co-workers (Black 1969, Black and Jensen 1970) were the first to attempt to
identify and model the rotor dynamics effects of turbulent annular seals using bulk flow models
(similar to those of Reynolds lubrication equations). Bulk flow models employ velocity components,
( , )zu z θ and ( , )u zθ θ , that are averaged over the clearance, where zu and θu are the velocities in
the directions and z and θ are the coordinates as shown Figure (4.1). Black and Jensen used several
heuristic assumptions in their model, such as the assumption that / 2u Rθ ω= , where R is the radius
of the seal and ω is the rotor speed. Moreover, their governing equations do not reduce to
recognizable turbulent lubrication equations. These issues caused Childs (1983b) to publish a revised
version of the bulk flow model and the present section will focus on Childs' model.
The geometry of the seal annulus which is filled with fluid is sketched in Figure 4.1, and is described
by coordinates of the meridian of the gap as given by Z(s) and R(s), 0 < s < L, where the coordinate,
s, is measured along that meridian and t is the time. The clearance is denoted by H(s, θ, t) where the
unperturbed value of H is δ(s). Equations governing the bulk flow are averaged over the clearance.
This leads to a continuity equation of the form (4.1)
1( ) ( ) 0s s
H H dRHu Hu u
t s R R dsθθ
∂ ∂ ∂+ + + =
∂ ∂ ∂ (4.1)

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
307
where su and uθ are velocities averaged over the local clearance.
Figure 4.1. Fluid filled annulus between a rotor and a stator for turbulent lubrication analysis
The axial and circumferential momentum equations are as follows
21 ss sr s s s
s
u u u u uP dRu
s H H R ds t R
θ θτ τρ ρ ρ θ θ
∂ ∂ ∂∂− = + − + + +
∂ ∂ ∂ ∂ (4.2)
1 s r ss
u u u u u uP Ru
R H H t R s R s
θ θ θ θ θ θ θτ τρ θ ρ ρ θ
∂ ∂ ∂∂ ∂− = + − + + +
∂ ∂ ∂ ∂ ∂ (4.3)
The approach used by Hirs (1973) is employed to determine the turbulent shear stresses, τss and τθs,
applied to the stator by the fluid in the s and θ directions respectively, which takes the following form
12 21 ( / ) ( )
2
s
s
mmss s s s
s s
s
A uu u Re
u u
θθ
θ
τ τρ ρ
+
= = + (4.4)
and stresses, τsr and τθr, applied to the rotor by the fluid in the s and θ directions respectively and are
obtained as
12 21 ( ) / ( )
( ) 2
mmsr r r s
s s
s
A uu R u Re
u u R
θ
θθθ
θ
τ τω
ρ ρ ω
+
= = + − − (4.5)
where the local meridional Reynolds number is given as
Rotor
Stator
Co-ordinateθ and velocity θu - Normal
to sketch
Z(s) R(s)
H(s,θ,t)
s ssτ
rsτ
su

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
308
/s sRe Hu ν= (4.6)
and constants As, Ar, ms and mθ are chosen to fit the available data on turbulent shear stresses. Childs
(1983a) uses typical values of these constant.
As = As = 0.066; ms = mθ = -0.25 (4.7)
In the following subsection, the solution for the governing equation are presented and discussed in
details.
Approximate dynamic coefficients of seals
In the present subsection, the theoretical and computational analysis performed by various researchers
has been compiled. Lomakin (1958) was the first to propose a theoretical model of a plain seal, which
predicted that the axial pressure drop across the seal caused a radial stiffness, independent of shaft
rotation. The Lomakin radial direct stiffness (kd) is given by
2
0.25/4.7 with 0.079 /
1.5 2 /d e
P L Ck R R
L C
λλ
λ λ∆ = = +
(1)
where ∆P is the pressure drop and R, L and C are the radius, axial length and radial clearance of the
seal, respectively. If the direct stiffness were the only effect of the plain seal, then its effect on critical
speeds would be easily and accurately predictable. Black’s work (1969, 1971) provided the major
initial impetus for the extensive research and the state of the art design information developed on this
topic over the last 35 years. Black developed the classical theory for turbulent annular seals,
considering the axial fluid flow caused by a pressure drop along the seal, the rotational fluid flow as a
consequence of the shaft rotation and a relative motion of the seal between the rotor and housing.
Black (1969, 1971) and Childs (1983a, b) formulated and extended Lomakin’s theory in terms
applicable to the rotor dynamic analysis of centrifugal pumps. Black, Childs and others have shown,
however, that kd increases with shaft speed (at constant ∆P) and that the seal also produces cross-
coupled stiffness (kc), direct and cross-coupled damping (cd and cc), and direct inertia coefficients.
Moreover, the pressure drop will vary with the speed in most turbomachineries and the rotor dynamic
effects are quite complex.
Clearances, pressures and velocities are divided into mean components (subscript 0) that would
pertain in the absence of whirl, and small linear perturbations (subscript 1) due to the eccentricity, ε,
rotating at the whirl frequency, ω:

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
309
0 1 0 1
0 1 0 1
;
; s s s
H H H P P P
u u u u u uθ θ θ
ε ε
ε ε
= + = +
= + = + (4.8)
These expressions are substituted into governing equations (4.1-4.3) to yield a set of equations for
mean flow quantities and a second set of equations for perturbation quantities; terms which are of
quadratic or higher order in ε are neglected. Resulting zeroth-order equations define the leakage and
the circumferential velocity development and are solved by numerical methods. From the first order
equations, the time and θ dependency is eliminated to obtain the pressure distribution solution which
is then integrated and along and around the seal clearance to yield reaction force components. From
rotor dynamic force components, following rotor dynamic coefficients and constants are obtained
(Childs, 1983).
*2
20 )(
4
1kTaak
d
−= ω ; ∗= kTak
c )(
2
11ω ;
∗= cac d 1 ; ∗= cTac
c )(
2ω ; ∗= mamd 2 (4.9)
with
C
RLPk ∆=∗ ; Tkc ∗∗ = ; 2 Tkm ∗∗ = (4.10)
V
LT = (4.11)
EAa 5.20 = ;
++=6
1
2 21 E
BEAa
σ;
+=6
1 2 E
Aa
σ (4.12)
σξπσ
21 ++=A ;
2
2
41
71
b
bB
+
+= ;
)1(2
1
σξξB
E++
+= (4.13)
/L Cσ λ= ; ca RRb /= ;
µρVC
Ra = and µ
ρ CRRc
Ω= (4.14)
where k, m and c are the stiffness, mass and damping coefficients, ∗k , ∗c and ∗m are reference
values of corresponding quantities, oa 1a and 2a are dimensionless coefficients, ω is the speed of
the rotor, T is the transit time as given in equation 4.11, L is the length of the seal, V is the average
axial stream velocity, ξ is the entrance loss coefficient, ρ is the fluid density, λ is the friction
coefficient, R is the radius of the seal, C is the clearance of the seal and ∆P is the difference between
pressures at the inlet and the exit of the seal. Subscripts d and c represent the direct and cross-coupled

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
310
terms, respectively. Ra is the Reynolds number for the axial flow and Rc is the Reynolds number for
the circumferential flow for smooth annulus seals. Dimensional coefficients are thus functions of ξ ,
σ and b. To determine coefficients 0a , 1a and 2a coefficients σ and b are required for the
frequently occurring value of ξ =0.5. From Childs (1983a), we have
[ ] 375.024/1 )2/1(1066.0 bRa += −λ (4.15)
To calculate λ the average velocity V is inserted into equation (4.14). The expression for V can be
obtained from the fundamental relationship for the pressure difference,
2
2)21( VPρ
σξ ++=∆ (4.16)
So, the average axial stream velocity can be expressed as
)21(
2
σξρ ++∆
=P
V (4.17)
Since the desired value of λ is also function of V and thereby σ, it is best obtained iteratively. From
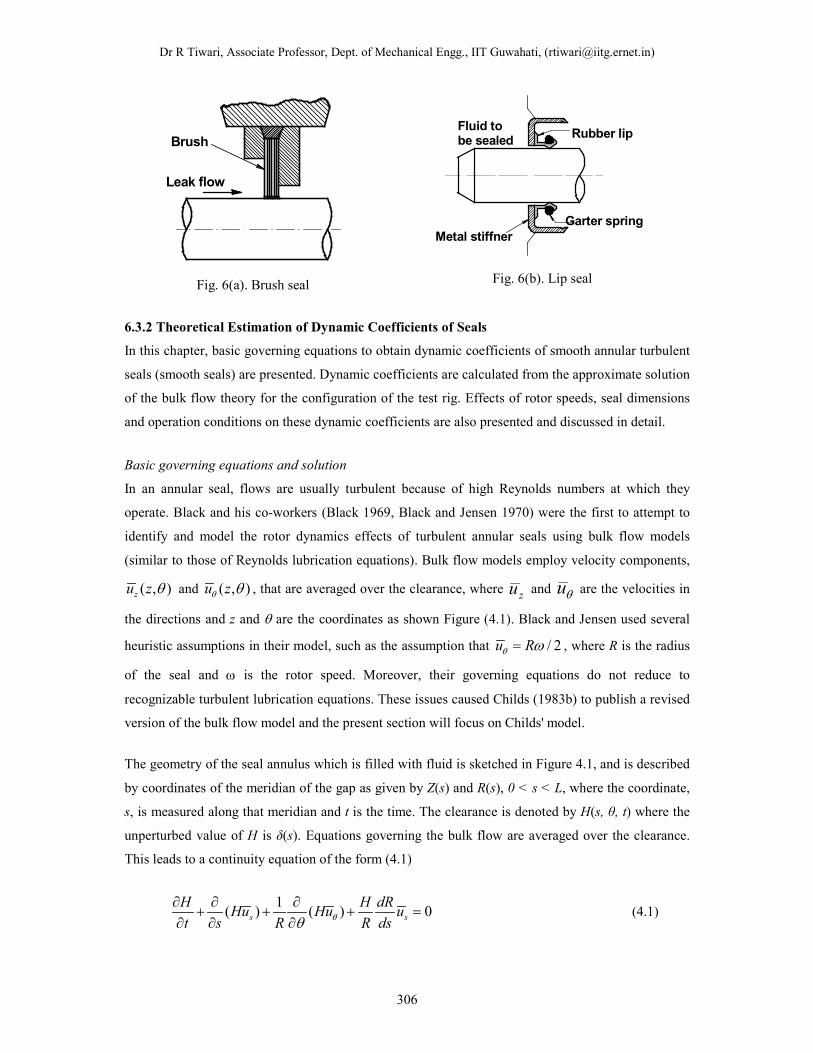
the σ, the dynamic coefficients can be obtained for different speed ω. Figure 4.2 shows an algorithm
for the solution of dynamic coefficients of seals.
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
311
Figure 4.2. Flow chart for the theoretical estimation of dynamic coefficients of seals
Start
Input: ρ, ξ, ∆P, µ, C, L, R Set N = 0 rad/s
σ = σ + 0.001 Calculate V, b, Ra
Calculate LC / 1 σλ = ,
[ ] 375.024/1 )2/1(1066.0 bRa += −λ
λλ −= 1e
Calculate A, B, E, a0, a1, a2
Calculate ∗k , ∗c , ∗m Calculate kd, kc, cd, cc, md
Set N = N+1
End
If N > 5301
Yes
Yes
No
If e ≥ 10-4
σ = 0 and e = 1
No

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
312
Numerical simulation results and discussion
In this subsection, numerical results of dynamic coefficients of seals are presented for the rotor speed
up to 50,000 rpm. The input data are taken as mentioned in Table 4.1.
Table 4.1. Input data for numerical simulation of dynamic coefficients of seals
Length of the seal 11, 22, 33 and 44 mm
Radius of the seal 22 mm
Clearance of the seal 0.2 and 0.4 mm
Dynamic viscosity of water at 32 oC 0.8×10-6 m2/s
Entrance loss coefficient 0.5
Inlet pressure 3, 6, 16, 41, 81 bar
Seal exit pressure 1 bar
Speed of the rotor 1 to 50,000 rpm
Seals dynamic coefficients are dependent on speeds, seal dimensions and pressure differences. The
stiffness (kd and kc), damping (cd and cc) and mass (md) coefficients are presented for various speeds
(ω), pressure differences (∆P) and ratios L/D.
Figures 4.3 to 4.15 show the variation of the direct and cross-coupled stiffness and damping and direct
inertia coefficients with respect to the speed up to 50000 rpm, for different values of clearances (0.2
and 0.4 mm), L/D ratios (0.25, 0.50, 0.75 and 1.00) and pressure differences (2, 5, 15, 40 and 80 bar).
The effects of these variables on seal dynamic coefficients are discussed in detail in following
sections.
Effect of rotational speeds and pressure differences
Direct stiffness coefficients increase with increase in the pressure difference (Figure 4.3). At low-
pressure differences (2 and 5 bars), the direct stiffness coefficient becomes negative as shown in
Figure 4.3. The direct stiffness coefficient reaches maximum nearly at 5000 rpm and then slowly
declines as shown in Figure 4.3. The cross-coupled stiffness linearly increases with the rotor speed
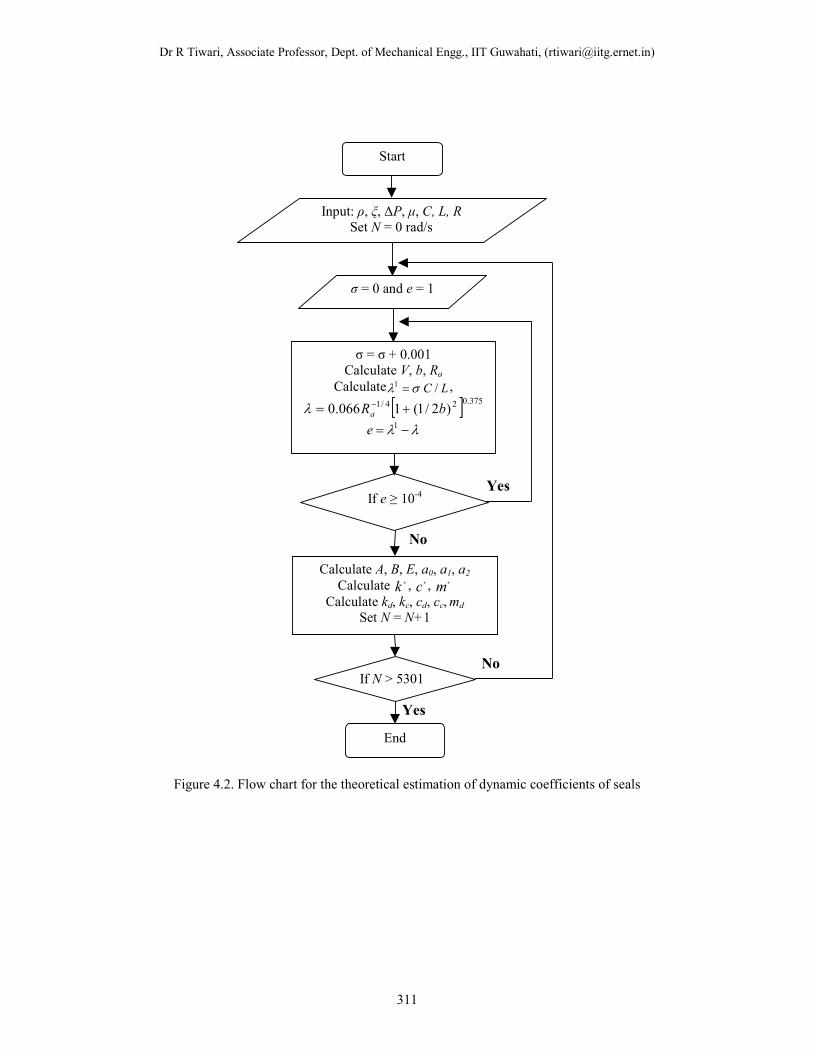
and also increases with the pressure difference (Figure 4.4). The direct damping coefficient increase
slightly to the speed, however, it increases with the pressure difference (Figure 4.5). The cross-
coupled damping increases linearly with the speed but, insensitive to the pressure difference (Figure
4.6). The direct inertia coefficient increases sharply with the rotor speed and it is almost insensitive to
the pressure difference (Figure 4.7).
Effect of L/D ratios

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
313
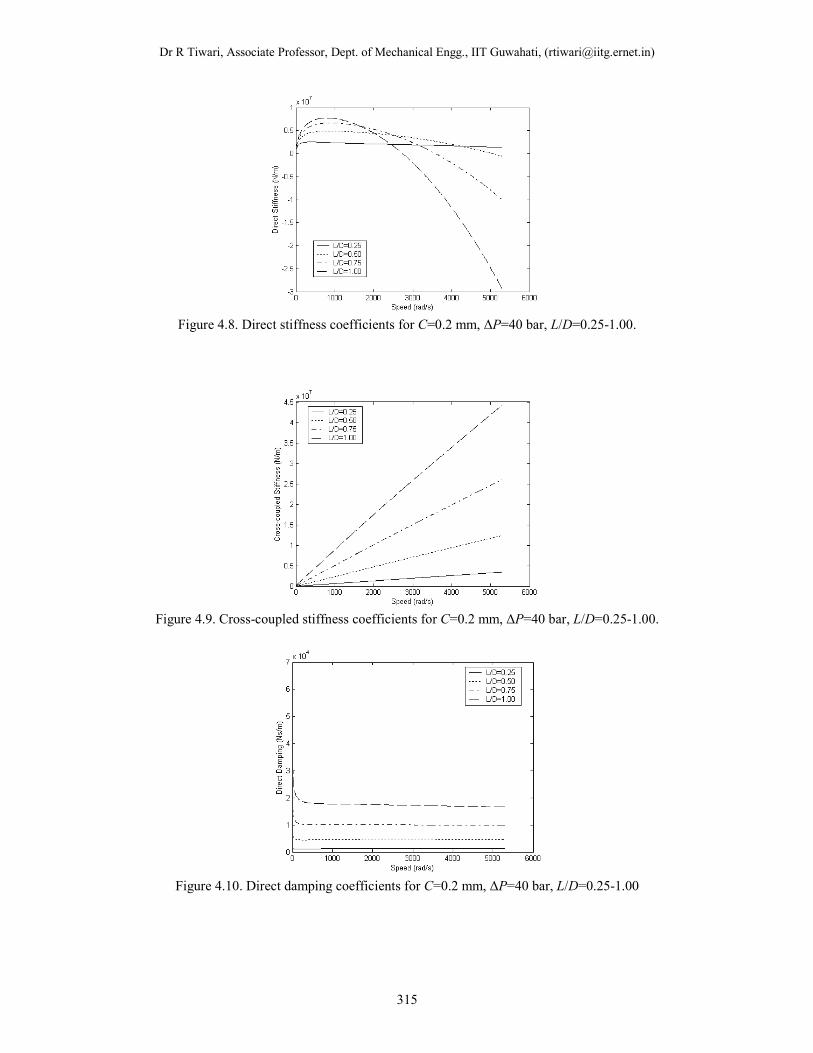
L/D ratio has significant effect on rotor dynamic coefficients of seals. The direct stiffness increases
with the increase in L/D ratio. For L/D= 1.00, after reaching a maximum value nearly to 8000 rpm it
starts declining and becomes negative with increase in the rotor speed. At L/D=0.25, the direct
stiffness coefficient always has positive values (Figure 4.8). The cross-coupled stiffness and the direct
and cross-coupled damping coefficients increase with the increase in L/D ratio as shown in Figures
4.9-4.10.
Effect of seal clearances
Doubling the clearance show a huge drop in the direct stiffness and damping coefficients, while
increasing speeds up to 50,000 rpm. The drop in the cross-coupled stiffness and damping and direct
inertia coefficients with increase in clearance is also significant (Figures 4.13-4.15).
Figure 4.3. Direct stiffness coefficients for C=0.2 mm, L/D=0.25 and ∆P=2 to 80 bar.
Figure 4.4. Cross-coupled stiffness coefficients for C=0.2 mm, L/D=0.25, ∆P=2 to 80 bar.
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
314
Figure 4.5. Direct damping coefficients for C=0.2 mm, L/D=0.25, ∆P=2 to 80 bar.
Figure 4.6. Cross-coupled damping coefficients for C=0.2 mm, L/D=0.25, ∆P=2 to 80 bar.
Figure 4.7. Direct inertia coefficients for C=0.2 mm, L/D=0.25, ∆P=2 to 80 bar.
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
315
Figure 4.8. Direct stiffness coefficients for C=0.2 mm, ∆P=40 bar, L/D=0.25-1.00.
Figure 4.9. Cross-coupled stiffness coefficients for C=0.2 mm, ∆P=40 bar, L/D=0.25-1.00.
Figure 4.10. Direct damping coefficients for C=0.2 mm, ∆P=40 bar, L/D=0.25-1.00

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
316
Figure 4.11. Cross-coupled damping coefficients for C=0.2 mm, ∆P=40 bar, L/D=0.25-1.00
Figure 4.12. Direct inertia coefficients for C=0.2 mm, ∆P=40 bar, L/D=0.25-1.00
Figure 4.13. Direct and cross-coupled stiffness coefficients for ∆P=40 bar, L/D=0.25, C=0.2 & 0.4
mm.

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
317
Figure 4.14. Direct and cross-coupled damping coefficients for ∆P=40 bar, L/D=0.25, C=0.2 & 0.4
mm.
Figure 4.15. Direct inertia coefficients for ∆P=40 bar, L/D=0.25, C=0.2 and 0.4 mm.
Basic governing equations to obtain dynamic coefficients of the smooth-annular turbulent seals (i.e.
smooth seals) are explained briefly. Dynamic coefficients are calculated from the bulk flow theory for
a seal dimension and effects of rotor speeds, seal dimensions and operation conditions on dynamic
coefficients of seals are presented and discussed in detail.
6.3.3 Fluid-Film Dynamic Force Equations
A model of a typical annual (or clearance) seal is shown in Fig. 2(a). The geometrical shape of a
clearance seal is similar to that of a hydrodynamic bearing; however, they are different in the
following aspects. To avoid contact between a rotor and a stator, the ratio of the clearance to the shaft
radius in seals is made few times (2 to 10 times) larger than that of hydrodynamic bearings. The flow
in seals is turbulent and in hydrodynamic bearings it is laminar. Therefore, unlike hydrodynamic
bearing, one cannot use the Reynolds equation for analysis of seals. When a rotor vibrates, a reaction

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
318
force of the fluid in the seal acts on the rotor. In case of a small vibration around the equilibrium
position, the fluid force can be linearized on the assumption that deflections and x y∆ ∆ are small.
The general governing equations of fluid-film forces on seals, which has small oscillations relative to
the rotor, is given by the following linearized force-displacement model (Childs et al., 1986)
xy xy xyx xx xx xx
y yx yx yxyy yy yy
k c mf k c mx x x
f k c mk y c y m y
∆ ∆ ∆ − = + + ∆ ∆ ∆
(2)
where fx and fy are fluid-film reaction forces on seals in x and y directions. k, c, m represent the
stiffness, damping and added-mass coefficients, subscripts: xx and, yy represent the direct and xy and
yx represent the cross-coupled terms, respectively. These coefficients vary depending on the
equilibrium position of the rotor (i.e. magnitude of the eccentricity), rotational speed, pressure drop,
temperature conditions etc. The off-diagonal coefficients in equation (2) arise due to fluid rotation
within the seal and unstable vibrations may appear due to these coefficients. Equation (2) is applicable
to liquid annular seals. But for the gas annular seals, the added-mass terms are negligible. For small
motion about a centered position (or with very small eccentricity) the cross-coupled terms are equal
and opposite (e.g., kxy = -kyx = kc and cxy = -cyx = cc) and the diagonal terms are same (e.g., kxx = kyy = kd
and cxx = cyy = cd) (Childs et al., 1986). Considering these relationships and neglecting the cross-
coupled added-mass terms, equation (2) takes the following form
0
0
x d c d c d
y dc d c d
f k k c c mx x x
f mk k y c c y y
∆ ∆ ∆ − = + + − ∆ − ∆ ∆
(3)
where subscripts: d and c represent direct and cross-coupled, respectively. The RDPs largely affect the
performance of the turbomachineries as they lead to serious synchronous and sub-synchronous
vibration problems. Whirl frequency ratio, f = kc /(cdω ) is a useful non-dimensional parameter for
comparing the stability properties of seals. For circular synchronous orbits, it provides a ratio between
the destabilizing force component due to kc and the stabilizing force component due to cd. In
experimental estimation of RDPs of seals, these coefficients (of equation (2) and (3)) are determined
with the help of measured vibrations data from a seal test rig.
The more recent textbooks on rotor dynamics include information on rotor dynamic characteristics of
rotary seals. Vance (1988), Childs (1993), Krämer (1993), Rao (2000), Adams (2001) and Tiwari et
al. (2005) provide a good introductory treatments of seal dynamics.
References:

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
319
Admas, M.L. Jr, 2001, Rotating Machinery Vibration, Marcel Dekker, Inc., New York. Changsen, W., 1991, Analysis of Rolling Element Bearings, Mechanical Engineering Publications
Ltd., London. Childs, D.W., 1993, “Turbomachinery Rotordynamics: Phenomena, Modeling and Analysis”, John
Wiley & Sons, Inc., New York. El-Sayed H. R., 1980, Wear, 63, 89-94.Stiffness of deep-groove ball bearing. Eschmann, P., Hasbargen, I. and Weigand, K., (1985), Ball and Roller Bearings, Theory, Design and
Application. John Wiley and Sons:New York. Gargiulo E.P., 1980, Machine Design, 52, 107-110. A simple way to estimate bearing stiffness. Harris, T.A., 2001, Rolling Bearing Analysis, Wiley, New York. Hertz, H., (1896), Miscellaneous Papers, Macmillan, London, 163-183. On the contact of rigid elastic
solids and on hardness. Hummel, C., 1926, “Kristische Drehzahlen als Folge der Nachgiebigkeit des Schmiermittels im
Lager,” VDI-Forschungsheft, 287. Johnson. T.L., 1991, Contact Mechanics, 2nd edition, McGraw-Hills, New York. Jones, A. B., 1946, Analysis of Stresses and Deflections, New Departure Engineering Data, Briston. Jones A.B., 1960, Transactions of ASME, Journal of Basic Engineering, 309-320, A general theory
for elastically constrained ball and radial roller bearings under arbitrary load and speed conditions.
Krämer E., 1993, “Dynamics of Rotors and Foundations,” Springer-Verlag, New York. R. Kashyap and R. Tiwari, 2006, Prediction of Heat Generations and Temperature Distributions at
Critical Contact Zones of High-Speed Rolling Bearings, Proceedings of 18th National & 7th ISHMT-ASME Heat and Mass Transfer Conference, January 4-6, 2006, IIT Guwahati.
Lim, T. C. and Singh, R., (1990a), Journal of Sound and Vibration 139 (2), 179-199. Vibration Transmission Through Rolling Element Bearings, Part I: Bearing Stiffness Formulation.
Lim, T. C. and Singh, R., (1990b), Journal of Sound and Vibration 139 (2), 201-225. Vibration Transmission Through Rolling Element Bearings, Part II: System Studies.
Lim, T. C. and Singh, R., (1991), Journal of Sound and Vibration 151 (1), 31-54. Vibration Transmission Through Rolling Element Bearings, Part III: Geared Rotor System Studies.
Lim, T. C. and Singh, R., (1992), Journal of Sound and Vibration 153 (1), 37-50. Vibration Transmission Through Rolling Element Bearings, Part IV: Statistical Energy Analysis.
Lim, T. C. and Singh, R., (1994), Journal of Sound and Vibration 169 (4), 547-553. Vibration Transmission Through Rolling Element Bearings, Part V: Effect of Distributed Contact Load on Roller Bearing Stiffness Matrix.
Newkirk, B.L., 1924, “Shaft Whipping,” General Electric Review, pp. 169. Newkirk, B. L. and Taylor, H.D., 1925, “Shaft Whipping due to Oil Action in Journal Bearing,"
General Electric Review, 559-568. Palmgren, A., (1959), Ball and Roller Bearing Engineering, 3rd ed., Burbank. Ragulskis, K. M., Jurkauskas, A. Yu., Atstupenas, V. V., Vitkute, A. Yu., and Kulvec, A. P., (1974),
Vibration of Bearings. Vilnyus: Mintis Publishers. Rao, J. S., 2000, “Vibratory Condition Monitoring of Machines,” Narosa Publishing House, New
Delhi. Schweitzer, G., Bleuler, H. and Traxler, A., 1994, Active Magnetic Bearing: Basics, Properties and
Application of Active Magnetic Bearings. Vdf Hochschulverlag AG an der ETH, Zürich. Smith, D.M., 1969, Journal Bearings in Turbomachinery, Chapman and Hall, London. Stodola, A., 1925, “Kritische Wellenstörung infolge der Nachgiebigkeit des Ölpolslers im Lager
(Critical shaft perturbations as a result of the elasticity of the oil cushion in the bearings),” Schweizerische Bauzeitung, Vol. 85, No. 21, May.
Stolarski, T. A., (1990), Tribology in Machine Design. Oxford: Heinemann Newnes. Timoshenko, S. and Goodier, J., 1951, Theory of Elasticity, 2nd edition, McGraw-Hills, New York. Vance, J.M., 1998, “Rotordynamics of Turbomachinery”, John Wiley & Sons Inc, New York.

Related Documents











