- 1 - 3. SZINKRON MOTOROS HAJTÁSOK A hagyományos szinkron motorokat rendszerint nagy teljesítményű (P>100 kW) ál- landó fordulatszámú hajtásoknál alkalmazzák, pl. szivattyúk, dugattyús kompresszo- rok, malmok hajtásainál. Az áramirányítós szinkron motoros hajtással fordulatszám szabályozást, állandó nyomatékkal történő indítást is megvalósítanak. Az állandó mágneses szinkrongépek fő alkalmazási területe a szerszámgépek és robotok szervohajtásaiban van. A szinkron generátorokat erőművi vagy segédüzemi illetve tartalék forrásokban vil- lamos energia termelésre hasznáják. A szinkron gép állórésze általában 3 fázisú, forgórésze hengeres (állandó légrésű) vagy kiálló pólusú (változó légrésű). a) b) A B C C B A A B C C B A a) Hengeres forgórészű és b) kiálló pólusú szinkron gép vázlata A szinkron gép működése Az állórész által létrehozott forgó mágneses tér pólusrendszerével kapcsolódik a for- górész gerjesztő tekercse (vagy a forgórészre rögzített állandó mágnes) által létreho- zott pólusrendszer. A hálózatról táplált szinkron gép egyetlen fordulatszámon az ál- lórész mező fordulatszámával megegyező ún. szinkron fordulatszámon üzemképes. A szinkron gép felépítése A B C C B A Négypólusú szinkron gép metszetvázlatai

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

- 1 -
3. SZINKRON MOTOROS HAJTÁSOKA hagyományos szinkron motorokat rendszerint nagy teljesítményű (P>100 kW) ál-landó fordulatszámú hajtásoknál alkalmazzák, pl. szivattyúk, dugattyús kompresszo-rok, malmok hajtásainál. Az áramirányítós szinkron motoros hajtással fordulatszámszabályozást, állandó nyomatékkal történő indítást is megvalósítanak. Az állandómágneses szinkrongépek fő alkalmazási területe a szerszámgépek és robotokszervohajtásaiban van.A szinkron generátorokat erőművi vagy segédüzemi illetve tartalék forrásokban vil-lamos energia termelésre hasznáják.A szinkron gép állórésze általában 3 fázisú, forgórésze hengeres (állandó légrésű)vagy kiálló pólusú (változó légrésű).
a) b)
A
B
C
C
B
A
A
B
C
C
B
A
a) Hengeres forgórészű és b) kiálló pólusú szinkron gép vázlata
A szinkron gép működéseAz állórész által létrehozott forgó mágneses tér pólusrendszerével kapcsolódik a for-górész gerjesztő tekercse (vagy a forgórészre rögzített állandó mágnes) által létreho-zott pólusrendszer. A hálózatról táplált szinkron gép egyetlen fordulatszámon az ál-lórész mező fordulatszámával megegyező ún. szinkron fordulatszámon üzemképes.
A szinkron gép felépítése
A
BC
CB
A
Négypólusú szinkron gép metszetvázlatai

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 2 -
Az indító/csillapító kalicka elhelyezése a pólussaruban
Függőleges tengelyű hidrogenerátor állórésze
Függőleges tengelyű kiálló pólusú hidrogenerátor forgórésze
Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 3 -
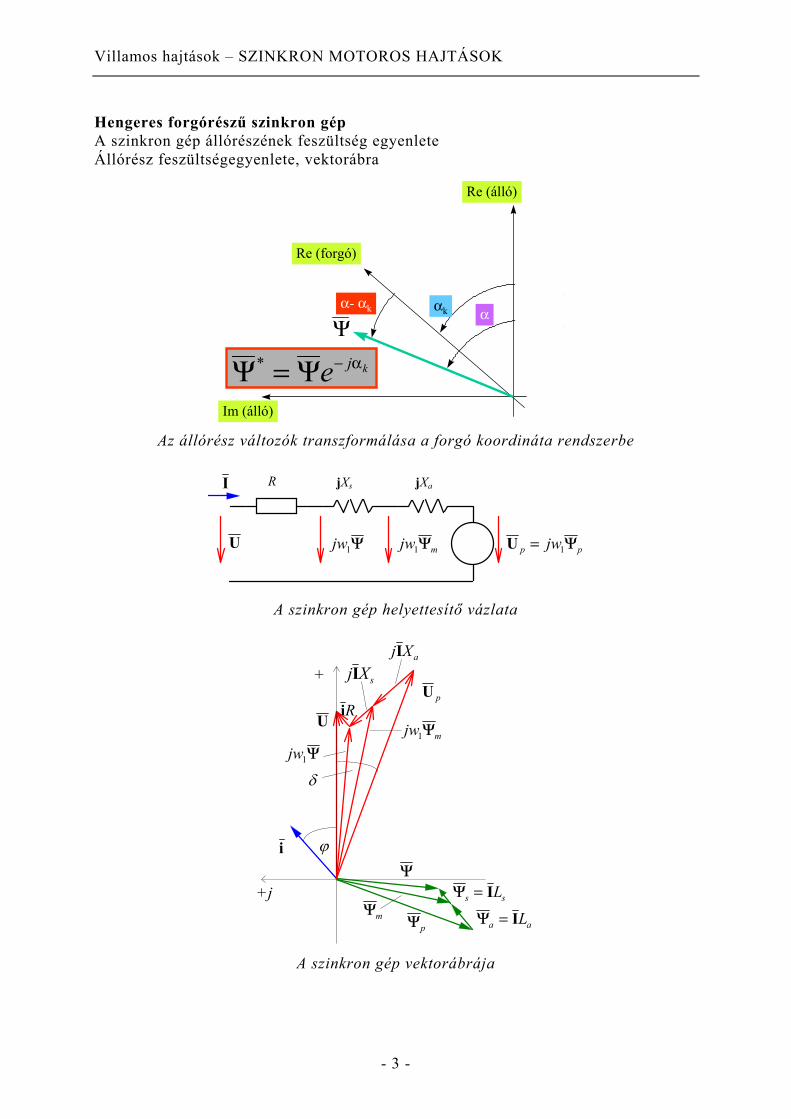
Hengeres forgórészű szinkron gépA szinkron gép állórészének feszültség egyenleteÁllórész feszültségegyenlete, vektorábra
Re (álló)
Im (álló)
Re (forgó)
αk
Ψα
α- αk
Ψ Ψ* = −e j kα
Az állórész változók transzformálása a forgó koordináta rendszerbe
R jXs jXa
U
I
jw m1Ψ U p pjw= 1Ψjw1Ψ
A szinkron gép helyettesítő vázlata
jw m1Ψ
Ψ
iR
j XaI
U p
i ϕ
δ
Ψp
+j
+
jw1Ψ
Ψs sL= I
Ψa aL= IΨm
j XsI
U
A szinkron gép vektorábrája

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 4 -
δ
ϕ
ϕ
a a'
j XdI
jXd
UpU
I
+j
+
I
U
Up
A szinkron gép egyszerűsített helyettesítő vázlata és vektorábrája
-Pmax
Pmax
P
0
-π/2-π
ππ/2δ
motor
generátor
A szinkron gép teljesítmény - terhelési szög jelleggörbéje
Mt
M
0
-π/2-π
ππ/2δ
motor
generátor
δ1δ2
Ig1
Ig2
A gerjesztő áram változtatás hatása a statikus munkapontra

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 5 -
Up U
Ψp
Ψ+j
+
+j
+
+j
+
a) b) c)
j XsI
Ψp
ΨI
Ψa
Up
U
I Ψ Ψa
Ψp
j XsI
j XaIj XaI
Ψa = 0I = 0
U p
U
Végtelen hálózatra kapcsolt szinkron gép üresjárási vektorábrájaa) U=Up, b) alulgerjesztett, c) túlgerjesztett
+j
+
δ
j XaI
j XsI
IRa
I
Ψp
Ψa
Ψ
Up
U
ϕ
δ
+j
+
Up
U
j XsI j XaI
Ψ
Ψp
I
IRa
jw1Ψ
Ψa
Ψs
jw m1Ψ
ϕ
δ
+j
+j XsI
j XaI
Ψp
Ψa
I
IRa
U
Up
Ψ
jw m1Ψ
jw1Ψ
a) b) c)
Végtelen hálózatra kapcsolt szinkron motor vektorábrája a) cosϕ=1 esetén, b) alul-gerjesztett, c) túlgerjesztett állapotban

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 6 -
+j
+
δ
Up
j XaI
j XsI IRa
I
Ψp
Ψa
Ψ
U
jIXa
ϕ
δ
+j
+
Up
Ψp
Ψa
Ψ
I
j XsI IRa
U
jw m1Ψ
jw1Ψ
jIXa
ϕ
δ
+j
+
Ψp
Ψa
ΨI
j XsI
IRa
U
Up
jw m1Ψ
jw1Ψ
a) b) c)Végtelen hálózatra kapcsolt szinkron generátor vektorábrája a) cosϕ=1 esetén, b)
alulgerjesztett, c) túlgerjesztett állapotban
ϕδ
δ
+
+j
meddő teljesítmény felvétel(induktív fogyasztó)
meddő teljesítmény leadás(kapacitív fogyasztó)
hatásos teljesítmény felvétel( motor)
Ig1 Ig2 Ig3
hatásos teljesítmény leadás( generátor)
U
I −Up
jXd
Up
UjXd
Hengeres forgórészű szinkrongép áram vektor-diagramja

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 7 -
Állórész áram és hatásfok a gerjesztõáram függvényébenSynchronous Motor, Power Factor, Copyright 2004 Kilowatt Classroom, LLC.
http://www.kilowattclassroom.com/Archive/SyncMotors.pdf
A szinkron gép statikus stabilitásaLassú terhelés vagy gerjesztés változás esetén.
0 π
Mmax
π/20.0 δ
Mt1 2
M
Ms
∆δ
∆M
∆δ
∆M
M Ms
δ1 δ2
A statikus stabilitás illusztrálása
Az 1-el jelölt munkapontban a nyomaték M=Mt, a szögsebesség w=w1, a terhelésiszög δ=δ1.
M M M M sin 0 = M dwdtt max d− = − = =δ1 Θ .
Ha a terhelési szög valamilyen ok miatt ∆δ-val megváltozik (nő), a motor nyomatékaszintén változik, ∆M-el megnő:
M + M M M dwdtt d∆ Θ− = = > 0 ,

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 8 -
vagyis w>w1, a gyorsulás következtében a δ terhelési szög csökkenni fog, a motorközelít az eredeti munkaponthoz, ami ennek alapján statikusan stabilis.Az 2-vel jelölt munkapontban a nyomaték M=Mt, a szögsebesség w=w2, a terhelésiszög δ=δ2.
M M M M sin M = 0 dwdtt max d− = − = =δ2 Θ .
Ha a terhelési szög valamilyen ok miatt ∆δ-val megváltozik (nő), a motor nyomatékaszintén változik, ∆M-el csökken:
M - M M M dwdtt d∆ Θ− = = < 0 ,
vagyis w<w1, a lassulás következtében a δ terhelési szög tovább fog nőni, a motortávolodik az eredeti munkaponttól, ami ennek alapján statikusan labilis.Ezekből a vizsgálatokból azt a következtetést lehet levonni, hogy a szinkron gép sta-tikusan akkor stabilis, ha ∆M és ∆δ előjele azonos:
∆∆
Mδ
> 0 ,
A ∆∆
M Msδ= hányadost szinkronozó nyomatéknak nevezik.
Mivel Ms=Mmaxcosδ, Ms>0, ha δ<90°.
A ststikus stabilitási tartalékra a λ = MM
max
t
hányados, az ún. túlterhetőség a jellemző.
Áktalános célú mtoroknál a névleges munkapontban szokásos értéke λ=0,6, amiből
sin nδ = 11 6,
és δn=38,7°.
A szinkron gép dinamikus stabilitásaHirtelen fellépő, nagy változásoknál.Állandósult üresjárásban (δ=0, M=0) Mt nagyságú terheléslökés jut a motor tengelyé-re (t=0).Mindaddig, amíg δ<δ1 és M<Mt, Md=M-Mt < 0, ez a mozgásegyenlet szerint lassulást
jelent, dd
twt
M M= −Θ
, vagyis (w<w1).
A t=t1 időpontban δ=δ1, M=Mt, Md=0 és dwdt
= 0 , ebben a pillanatban van w minimu-
ma, w=wmin<w1. A t1 időpontot kívetően a forgórész δ lemaradása tovább nő, de márMd=M-Mt > 0 mellett, a motor gyorsul, így w>wmin.A terhelési szögnek a t=t2 időpontban van maximuma δ=δmax, amikor a szögsebesség
eléri a w=w1 szinkron értéket, mivel ddδt
w w= −1 . Ekkor M>Mt, Md=M-Mt > 0, ami
további gyorsulást jelent. A terhelési szög w>w1 mellett csökkenni kezd.Amennyiben a terhelési szög meghaladja a δ2 értéket, úgy M<Mt és Md < 0 lesz, wcsökken, δ tovább nő, a gép kiesik a szinkronizmusból.A stabilitás feltétele tehát: δmax< δ2.
Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 9 -
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
δ
M
Mt
δ1 δ2δmax
0 50 100 150 200 250
0
0.2
0.4
0.6
0.8
1
t
M
Mt
0 50 100 150 200 2500.95
1
1.05
t
w
w1
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
t
δ
δ1
δ2
t1 t2
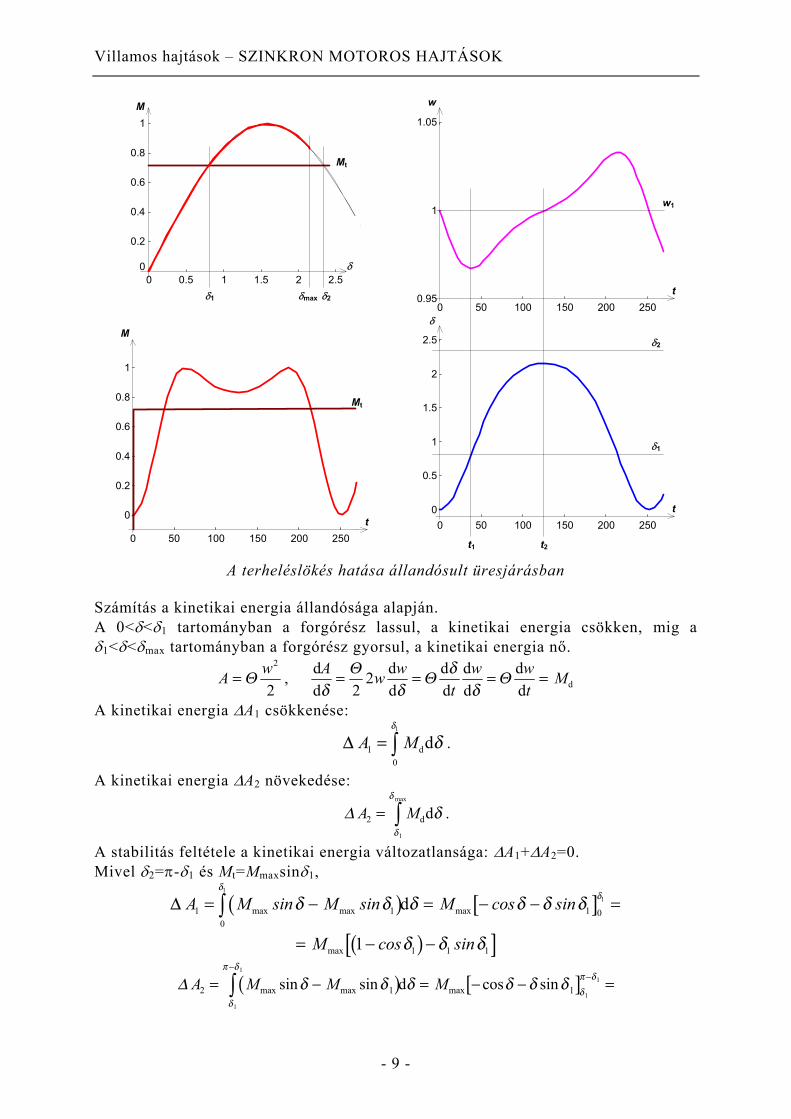
A terheléslökés hatása állandósult üresjárásban
Számítás a kinetikai energia állandósága alapján.A 0<δ<δ1 tartományban a forgórész lassul, a kinetikai energia csökken, mig aδ1<δ<δmax tartományban a forgórész gyorsul, a kinetikai energia nő.
A w= Θ2
2, d
ddd
dd
dd
dd d
A w wt
w wt
Mδ δ
δδ
= = = =Θ Θ Θ2
2
A kinetikai energia ∆A1 csökkenése:
∆ A M1 = ∫ d0
1
dδ
δ .
A kinetikai energia ∆A2 növekedése:
∆ A M2 = ∫ d
1
dδ
δ
δmax
.
A stabilitás feltétele a kinetikai energia változatlansága: ∆A1+∆A2=0.Mivel δ2=π-δ1 és Mt=Mmaxsinδ1,
( ) [ ]∆ A M M M1 1 1 01= − = − − =∫ max max
0max
1
dsin sin cos sinδ δ δ δ δ δδ
δ
( )[ ]= − −Mmax 1 1 1 1cos sinδ δ δ
( ) [ ]∆ A M M M2 1 11
1= − = − − =−
−∫ max max max
1
1
dsin sin cos sinδ δ δ δ δ δδ
π δ
δ
π δ

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 10 -
( ) ( )[ ]= + − −Mmax cos cos sinδ δ π δ δ1 1 1 12
( ) ( )[ ]∆ ∆A A M1 2 1 1 1 1 1 11 2 2 0+ = − − + − − =max cos sin cos sinδ δ δ δ π δ δ1+cosδ1=(π-δ1)sinδ1, amiből δ1max=46,44°.
Vagyis Mtmax=Mmaxsinδ1=0,725·Mmax.
50 100 150
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
46,44°
∆A1
∆A2
∆A1+∆A2
δ1
A dinamikus stabilitás határához tartozó terhelési szög
A kiálló pólusú szinkrongépA kiálló pólusú gépnél d és q irányban eltérő a mágneses vezetőképesség, Ψa irány-függő, a fluxust d és q irányú összetevőkre bontjuk.Ψ Ψ Ψα = +ad aq
Ψad-t Θad illetve id hozza létre (Φad=ΘadΛad), Ψaq-t Θaq illetve iq (Φaq=ΘaqΛaq), így aΨa teljes armatúra fluxus által indukált feszültség
jw j X j Xad aq1Ψα = +I Id q
Az állórész feszültség egyenlete( ) ( )U I I I I I I Ud q d q d q p= + + + + + +R j X j X j Xs ad aq
A d- és q-irányú szinkron reaktanciaXd=Xs+XadXq=Xs+Xaq Xd > XqAz ohmos feszültségesés elhanyagolásával
U I I Ud q p= + +j X j Xd q
I I Id q= +Célszerű az egyenleteket forgórészhez rögzített d-q koordináta rendszerben vizsgálni,a komplex valós irányt a d-tengely, a képzetest pedig a q-tengely irányába választvaegy túlgerjesztett motor vektorábrája

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 11 -
U
I
U p
jI Xd djI Xq q
Ψp
Iq
Id
δ
ϕ
q
+d
+j
A kiálló pólusú szinkrongép vektorábrájaAz ábra alapjánId q− = − +I jId q és
Ud q− = − +U jUsin cosδ δA feszültség egyenlet vetületi alakjai:a valós (d-irányú) összetevők
-Usinδ = - IqXq, ebből IUXq
q= sin δ
a képzetes (q-irányú) összetevők
Ucosδ = - IdXd + Up, ebből I UX
UXd
d
p
d
= − +cosδ
Id q−
− −
= − + = − + =+
− +−
I jIUX
UX
jUX
UX
e e UX
jUX
e ejd q
d
p
d q d
j jp
d q
j j
cos sinδ δδ δ δ δ
2 2
Id q−−= +
+ −
−
Ue
X XU
eX X
UX
j
d q
j
d q
p
d21 1
21 1δ δ
Id q−−= +
− −
−
Ue
X XU
eX X
UX
j
q d
j
q d
p
d21 1
21 1δ δ (Xd > Xq)
Visszatérés a hálózati feszültséghez rögzített koordinátákhoz, az áram vektor egyen-lete
U
Iδ
ϕ
q+
d
+j
π2
A koordináta transzformáció szemléltetése

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 12 -
I Id q= −
− +
e
jπ
δ2 e e e
ej
j j jj− +
− −
−
= =π
δ πδ
δ2 2
I = +
− −
−− −U
j X XU
je
X XUjX
eq d
j
q d
p
d
j
21 1
21 12δ δ
origó,terheléstől független
1. sugár,gerjesztéstől függet-
len
2. sugár,aszimmetriától füg-
getlen
+j
+
Uj X Xq d2
1 1+
− −
−Uj
eX X
j
q d21 12δ
− −UjX
ep
d
jδ
i
Up
U
2δ
δ
δ
A kiálló pólusú szinkrongép áram vektor-diagramja
A teljesítmény és a nyomaték számítása
{ }P U I= 32
Re
{ }Re sin sinI UX X
UXq d
p
d
= −
+
21 1 2δ δ
PUU
XU
X Xp
d q d
= + −
32
32 2
1 1 22
sin sinδ δ
M pPw
p UUw X
p Uw X X
p
d q d
= = + −
1 1
2
1
32
32 2
1 1 2sin sinδ δ

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 13 -
0 1 2 3
M
δ
kiálló pólusú
hengeres forgórészűreluktancia
A kiálló pólusú szinkrongép nyomaték-terhelési szög görbéje
Szinkron gépek gerjesztése
Szinkron generátor gerjesztése külsõ tápforrásrólGenerator Voltage Regulation, Excitation Methods,
Copyright 2004. Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Notebook4.htm
Gerjesztés külsõ tápforrásrólGenerator Voltage Regulation, Generator Components,

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 14 -
Copyright 2004 Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Notebook4.htm
Szinkron generátor gerjesztése forgódiódás átalakítórólGenerator Voltage Regulation, Excitation Methods,
Copyright 2004. Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Notebook4.htm
Szinkron motor gerjesztése egyenáramú gerjesztõgéprõlSynchronous Motor, Brush-Type Excitation Systems,
Copyright 2004. Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Archive/SyncMotors.pdf

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 15 -
Gerjesztés külsõ tápforrásrólGenerator Voltage Regulation, Generator Components,
Copyright 2004 Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Notebook4.htm
Szinkron motor gerjesztése forgódiódás átalakítórólSynchronous Motor, Brushless Exciters,
Copyright 2004. Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Archive/SyncMotors.pdf
Gerjesztés forgódiódás átalakítóról

VIAU4035 Átalakító kapcsolások és villamos hajtások 2008
- 16 -
Szinkron motor gerjesztése forgódiódás átalakítórólSynchronous Motor, Synchronizing Principle,
Copyright 2004. Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Archive/SyncMotors.pdf
Gerjesztés forgódiódás átalakítórólGenerator Voltage Regulation, Generator Components,
Copyright 2004 Kilowatt Classroom, LLC.http://www.kilowattclassroom.com/Notebook4.htm

Villamos hajtások – SZINKRON MOTOROS HAJTÁSOK
- 17 -
A viszonylagos (relatív) egységek használata váltakozó áramú gépeknél
Alapmennyiségek:
Névleges értékek:
Un, In - fázis névleges amplitudó, (a Park-vektor abszolut értéke)
w1 - szinkron szögsebesség
Származtatott mennyiségek:
ΨanU
w=
1
- amplitudó
P U Ia n n= 32
- 3 fázisú, Un, In csúcsérték, ez minden teljesítmény (P, Q, S) viszonyítási
alapja
M Pw
p Pw
U Iw
p U Iwa
a
m
a n n
m
n n= = = =1 1 1 1
32
32
Z UIa
n
n
=
L Zw
Uw I Ia
a n
n
a
n
= = =1 1
Ψ
A névleges teljesítmény relatív egységben:
P PP
U I
U In
n
a
n n n n
n n
n n'
coscos= = =
32
32
ϕ ηϕ η Pn
'< 1
M MM
p Pw
p Pw
P ww
Snn
a
n
n
an
n
n n
n
' ' cos= = = =−
1 1
11
φ η Mn'< 1 ( S w ww
wwn
n n= − = −1
1 1
1 )
A névleges tápláláshoz tartozó névleges indítási idő:
TwM
wM
wpM
m n
n
min
1
a
1
a
= ≈ =Θ Θ Θ
A mozgásegyenlet:
M M wttm− = Θ d
dM M
MM M
pMwt
ww
ww pM
wt
wpM
ww t
w T ww t
− = − = = = =t
a
't'
a
1
1
1
1 a1
1
a
'
11 in
'
1
wΘ Θ Θdd
dd
dd
dd
Related Documents











