3. Bölüm Temel Robot Kullanımı

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

3. Bölüm
Temel Robot Kullanımı


3. Bölüm: Temel Robot Kullanımı
45
3.1. Kontrol Paneli (smartPAD - Teach Pendant)
Şekil 3.1’de KUKA endüstriyel robotların hem kontrolü hem de programlanması amacıyla gerekli olan kullanım ve
görüntüleme özelliklerine sahip yeni nesil programlama cihazı olan smartPAD - Teach Pendant eski adıyla KUKA
Kontrol Paneli (KCP - KUKA Control Panel) görülmektedir. smartPAD dokunmatik bir ekrana sahip olup,
herhangi bir harici klavye veya fareye gereksinim duyulmadan hem elle hem de işaretleme kalemiyle
kullanılabilmektedir.
Şekil 3.1. KUKA Kontrol Paneli – KCP (smartPAD)
smartPAD cihazının önden ve arkadan görünümlerinin yer aldığı Şekil 3.2 ve Şekil 3.3’te, cihazın üzerinde bulunan
anahtar ve tuş takımlarının kullanım özellikleri ayrıntılı olarak gösterilmiştir. smartPAD cihazında insan-makine
arabirimi (HMI - Human Machine Interface) olarak smartHMI yazılımı kullanılmaktadır. Şekil 3.4’te ise KUKA
smartHMI kullanıcı arabirimi görülmektedir.

ERPE-METEG
46
1 smartPAD cihazını kontrolörden ayırmak için tuş
(Bu tuşa basıldığında, cihazı kontrolörden ayırmak için 25 sn ayırma süresi verilmektedir. Bu süre
dışında ayırma yapılırsa Emergency Stop durumu oluşmaktadır ve smartPAD geri takılmadan
Emergency Stop onaylanamamaktadır.)
2 Bağlantı yöneticisini çağırmak için anahtarlı şalter. Şalter sadece anahtar içindeyse çevrilebilir.
Bağlantı yöneticisi üzerinden işletim türü değiştirilebilir.
3 Acil Durdurma (Emergency Stop) butonu. Tehlikeli durumlarda robotu durdurmak için
kullanılmaktadır. Acil Durdurma butonu, basıldığında robot sistemi kilitlenir.
4 6D Space Mouse: Robota sezgisel olarak manuel hareket sağlar.
5 Hareket Tuşları (Jog Keys): Robota sezgisel olarak manuel hareket sağlar.
6 POV – (Program-Override) Program Hızı Ayar Tuşu
7 HOV – (Hand-Override) Elle Sürüş Hızı Ayar Tuşu
8 Ana (Main) Menü Tuşu: smartHMI' da menü noktalarını görüntüler
9 Durum (Status) Tuşları. Durum tuşları özellikle teknoloji paketlerindeki parametreleri ayarlamaya
yarar. Tam fonksiyonları hangi teknoloji paketlerinin yüklendiğine bağlıdır.
10 Başlat (Start) Tuşu: Başlat tuşu ile bir program başlatılır
11 Başlat Geri Tuşu (Start Backwards): Başlat geriye tuşu ile bir program geriden başlatılır. Program
adım adım işlenir.
12 Durdurma (Stop) tuşu: Stop tuşu ile çalışan bir program durdurulur.
13 Klavye Tuşu (Keyboard): Klavyeyi görüntüler. Genelde klavyenin özel olarak açılması gerekmez,
çünkü smartHMI klavye üzerinden giriş yapılması gerektiğini algılar ve klavyeyi otomatik olarak
görüntüler.
Şekil 3.2. KUKA smartPAD önden görünüş

3. Bölüm: Temel Robot Kullanımı
47
1 Onay Anahtarı (Enabling Switch) (Deadman – Motor on)
2 Başlat (Start) Tuşu (Yeşil) – Programların başlatılmasında kullanılmaktadır.
3 Onay Anahtarı (Enabling Switch) (Deadman – Motor on)
4 USB bağlantısı (Arşivleme/Geri Yükleme) (Sadece FAT32 formatlı USB bellekler içindir.)
5 Onay Anaharı (Enabling Switch) (Deadman – Motor on)
6 Kimlik (Identification) Kartı
Not
Onay Anahtarı 3 kademelidir. Manipülatörün hareket edebilmesi için onay anahtarı T1 ve T2 işletim
türlerinde orta konumda tutulmalıdır. Diğer alt ve üst konumlar pasif durum sergilenir. Otomatik ve
otomatik harici işletim türlerinde onay anahtarı fonksiyonsuzdur.
Şekil 3.3. KUKA smartPAD arkadan görünüş

ERPE-METEG
48
1 Status Bar 7 Hareket Tuşları (Aks: A1, A2, A3, A4, A5, A6 Kartezyen: X, Y, Z, A, B, C)
2 Mesaj Sayacı 8 POV – Program Override
3 Mesaj Penceresi 9 HOV – Jog Override
4 6D Mouse Koordinat Sistemi durum göstergesi 10 Butonlar (Dinamik çok amaçlı)
5 6D Mouse Referans Konum göstergesi 11 Sistem Saati
6 Hareket Tuşları Koordinat Sistemi durum
göstergesi
12 WorkVisual İkonu (Project Manager Penceresi)
Şekil 3.4. KUKA smartHMI kullanıcı arabirimi
3. Bölüm: Temel Robot Kullanımı
49
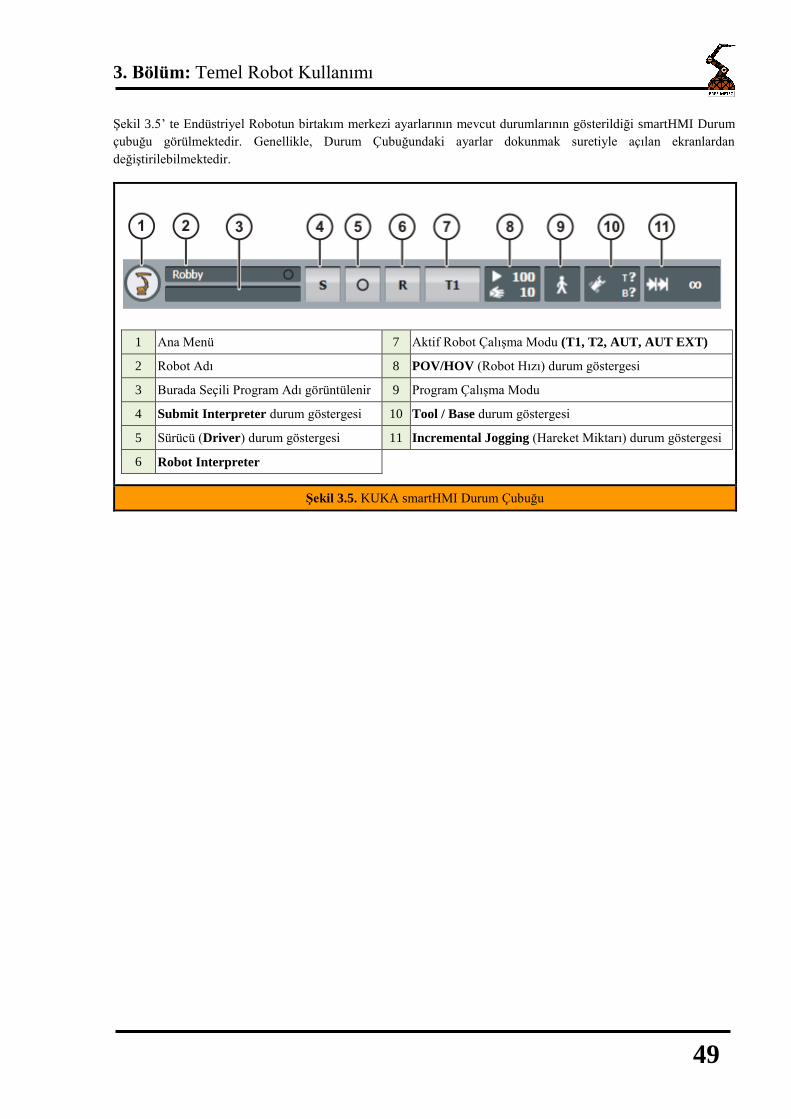
Şekil 3.5’ te Endüstriyel Robotun birtakım merkezi ayarlarının mevcut durumlarının gösterildiği smartHMI Durum
çubuğu görülmektedir. Genellikle, Durum Çubuğundaki ayarlar dokunmak suretiyle açılan ekranlardan
değiştirilebilmektedir.
1 Ana Menü 7 Aktif Robot Çalışma Modu (T1, T2, AUT, AUT EXT)
2 Robot Adı 8 POV/HOV (Robot Hızı) durum göstergesi
3 Burada Seçili Program Adı görüntülenir 9 Program Çalışma Modu
4 Submit Interpreter durum göstergesi 10 Tool / Base durum göstergesi
5 Sürücü (Driver) durum göstergesi 11 Incremental Jogging (Hareket Miktarı) durum göstergesi
6 Robot Interpreter
Şekil 3.5. KUKA smartHMI Durum Çubuğu

ERPE-METEG
50
No KUKA Sistem Yazılımının (KSS)
Sonlandırılması ve Yeniden Başlatılması
Y
3-1
KUKA Sistem Yazılımın (KSS: Kuka System Software) sonlandırılması
veya yeniden başlatılması işlemleri donanımsal ve yazılımsal olarak
yapılabilmektedir. Sonlandırma ve yeniden başlatma için aşağıdaki
adımlar izlenmelidir.
Shutdown kriterlerinin düzenlenmesi için Kullanıcı Grubu ‘Expert’ olmalıdır.
Robot kapatma veya açma işlemi başlatıldığında, sistem dosyalarının zarar görmemesi
amacıyla işlem sonlanıncaya kadar beklenilmesi gerekmektedir.
Donanımsal olarak kapatıp-açma için Kontrolör üzerindeki Power anahtarı kullanılır.
Adım 1. smartPAD ana menüsünden Shutdown seçilir.
Adım 2. Shutdown penceresinde ilgili seçenekler belirlenir.
Cold Start Sistem yazılımın tamamıyla yeniden başlatılmasıdır.
Hibernate Sistem yazılımında Bellek verileri diske yazılır ve yeniden yüklenerek açılış yapılır.
Bu açılış daha hızlı olmakla birlikte, açılış sonrasında sistemde seçili program
kaldığı yerden çalışmasına devam etmektedir.
Adım 3. “Shut down control PC” veya “Reboot control PC” butonuna basılarak doğrulama mesajı Yes ile
onaylanır.
Adım 4. Shutdown penceresi kriterlerine göre Sistem Yazılımı (KSS) sonlandırılır veya yeniden başlatılır.

3. Bölüm: Temel Robot Kullanımı
51
No Kullanıcı Arabirim Dilinin Değiştirilmesi
Y
3-2
Kullanıcı Arabirimi (smartHMI) dilinin değiştirilmesi için aşağıdaki
adımlar sırayla uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Configuration Miscellaneous Language seçilir.
Adım 2. İstenilen Dil seçilerek OK ile onaylanır.
smartPAD Desteklenen Diller
Chinese (simplified) Polish
Danish Portuguese
German Romanian
English Russian
Finnish Swedish
French Slovak
Greek Slovenian
Italian Spanish
Japanese Czech
Korean Turkish
Dutch Hungarian

ERPE-METEG
52
No Kullanıcı Grubu Değiştirme
Y
3-3
Kullanıcı Grubunu (User Group) değiştirmek için aşağıdaki adımlar
uygulanmalıdır.
KUKA Kullanıcı Grupları
User Group Açıklama
Operator Operatör Kullanıcı grubudur
User Operatör Kullanıcı grubudur
Expert Programcı kullanıcı grubudur. Şifre gerektirir.
Safety recovery Robot güvenlik konfigürasyonlarını düzenleyip etkinleştirebilir. Şifre
gerektirir.
Safety
maintenance
Bu kullanıcı grubu sadece KUKA.SafeOperation veya
KUKA.SafeRangeMonitoring kullanımı ile ilgilidir. Şifre gerektirir.
Administrator Expert kullanıcı grubu yetkilerine ilaveten, robot kontrolöre eklentilerin
entegre edilmesi yetkisine de sahiptir. Şifre gerektirir.
Açıklamalar
1. KUKA robotlar için varsayılan şifre “kuka” olarak belirlenmiştir. İsteğe bağlı
olarak değiştirilebilmektedir.
2. Sistem yeniden açıldığında, varsayılan kullanıcı grubu geçerli olmaktadır.
3. Robot Çalışma Modu, AUT veya EXT olarak seçilirse veya belirli bir süre
içerisinde (varsayılan ayarlı değer 5 dk.) kullanıcı arabirimi (smartPAD)
kullanılmazsa; kullanıcı grubu güvenlik sebeplerinden dolayı robot kontrolör
tarafından otomatik olarak Varsayılan değerine getirilir. Farklı bir Kullanıcı Grubu
ile çalışmak istenildiğinde yeniden değiştirilmesi gerekmektedir.
Adım 1. smartPAD ana menüsünden Configuration User group seçilir. Default kullanıcı grubu görüntülenir.
Adım 2. İstenilen User group seçimi yapılarak, Password ekranında ilgili şifre girilir.
Adım 3. Log-on ile User group’a giriş yapılır.

3. Bölüm: Temel Robot Kullanımı
53
3.1.1. 6D Mouse
Şekil 3.6’da 6D Space Mouse (12 Yönlü) görülmektedir. 6D Mouse ile sezgisel olarak manuel robot hareketi
yapmak mümkün olmaktadır. 6D Mouse ile X, Y, Z ötelemeli (Translational) ve A, B, C dönel (Rotational)
hareketlerin yapılmasında kullanıcıya büyük kolaylık sağlamaktadır.
Şekil 3.6. 6D Mouse
Şekil 3.7’de Ötelemeli Sola Hareket örneği görülmektedir. 6D Mouse bastırılıp çekilerek Endüstriyel Robot sola-
sağa hareket ettirilmektedir.
Şekil 3.7. Ötelemeli Sola (-Y) Hareket

ERPE-METEG
54
Şekil 3.8’de Z ekseni etrafında Dönel Hareket (A açısı) örneği görülmektedir. 6D Mouse bastırılıp çevrilerek
Endüstriyel Robota istenilen Dönel Hareket yaptırılabilmektedir.
Şekil 3.8. Z ekseni etrafında dönel hareket (A açısı)
Şekil 3.9’da görüldüğü gibi insan ve robot konumuna bağlı olarak 6D Mouse pozisyonu değiştirilebilmektedir.
Şekil 3.9. 6D Mouse pozisyonu için 0° ve 270° ayar durumu
6D Mouse için koordinat sistemi Axes, World, Tool ve Base olarak seçilebilmektedir.

3. Bölüm: Temel Robot Kullanımı
55
3.2. Robot Kontrolör Mesajları
Şekil 3.10’da KUKA smartPAD’te yer alan Mesaj Penceresi ve Mesaj Göstergesi görülmektedir. Robot Kontrolörü,
Mesaj Penceresi yardımıyla operatörle iletişim kurmaktadır. Burada hem mevcut mesajlar hem mesaj tipine bağlı
olarak kaç tane mesaj olduğu görüntülenmektedir.
Şekil 3.10. Mesaj Penceresi
Tablo 3.1’de görüldüğü gibi sistem çalışmasında robot kontrolör tarafından 5 farklı mesaj tipi kullanılmaktadır.
Tablo 3.1. Mesaj Tipleri
İkon Tip Açıklama
Onay
Robot programının yürütülmesine devam etmek için operatörün onayının gerekli
olduğu durumları belirtmek için kullanılır.
(Örnek: Acil Durdurma – Emergency Stop onayı)
Durum
Durum Mesajları, kumanda sisteminin güncel durumlarını bildirir.
(Örnek: Acil Durdurma – Emergency Stop)
Durum mesajları, durum devam ettiği sürece onaylanamaz.
Uyarı
Uyarı mesajları robotun doğru kullanımına ilişkin bilgi verir.
(Örnek: Başlatma tuşu gerekli)
Uyarı mesajları onaylanabilir türde mesajlardır. Kumandayı durdurmadıkları için
bunların onaylanması zorunlu değildir.
Bekleme
Bekleme mesajları, kumandanın hangi olayı (durum, sinyal veya süre) beklediğini
belirtir.
Bekleme mesajları "Simüle Et" butonuna basılarak manuel olarak iptal edilebilir.
Diyalog
Diyalog mesajları doğrudan operatörle iletişim kurmak / komut almak için
kullanılır.
Çeşitli cevap seçeneklerinin sunulduğu ve butonların olduğu bir mesaj penceresi
görüntülenir.

ERPE-METEG
56
Robot Kontrolör Mesajların kullanımına yönelik olarak dikkat edilmesi gereken bir takım hususlar bulunmaktadır.
Bunlar şu şekilde sıralanabilir:
Mesajlar, robotun işlevselliğine etki etmektedir. Bir onay mesajı daima robotun durmasına veya yeniden
başlamamasına neden olmaktadır. Robotu hareket ettirebilmek için öncelikle mesajın onaylanması gerekir.
"OK" komutu (onay), kullanıcı için mesaj içeriğinin bilincine varma konusunda bir taleptir.
Onaylanabilir bir mesaj, "OK" ile onaylanabilmektedir veya onaylanabilir mesajların hepsi “All OK” ile
bir defada onaylanabilmektedir.
Mesajlar içerisinde öncelikle daha eski mesajların okunması ve onaylanması daha önemlidir. Çünkü Yeni
mesajlar, eski mesajlara bağlı olarak verilmiş olabilmektedir.
Mesajlar, olayın zamanının tam olarak tespit edilebilmesi amacıyla tarih ve saat bilgisine sahiptirler.
Mesaj Penceresi üzerine basıldığında mesaj listesi genişlemektedir. En üstteki mesaja tekrar
dokunulduğunda veya ekranın sol kenarındaki "X" işaretine dokunulduğunda mesaj listesi kapanmaktadır.

3. Bölüm: Temel Robot Kullanımı
57
3.3. Endüstriyel Robot Çalışma Modları
Bir KUKA robotun Çalışma Modları ve dikkat edilmesi gereken güvenlik uyarıları Tablo 3.2’de görülmektedir.
Güvenlik Fonksiyonlarının Çalışma Moduna bağlı olarak geçerlilikleri ise Tablo 3.3’teki gibidir. Endüstriyel
Robotun çalışması esnasında Çalışma Modu değiştirildiği takdirde, tüm sürücüler hemen durdurulmaktadır. Bu
durumda Endüstriyel Robot Güvenlik Duruşu – 2 ile durmaktadır.
Tablo 3.2. KUKA Endüstriyel Robot Çalışma Modları ve dikkat edilmesi gereken kurallar
Çalışma Modu Açıklama
T1
(Manuel Azaltılmış Hız)
Test işletimi, programlama ve öğretme için kullanılır.
Program Modu için azami hız 250 mm/s
Jog Modu (Test ve Doğrulama) için azami hız 250 mm/s
Güvenlik Uyarıları:
Programlar öncelikle T1 çalışma modunda test edilmelidir.
Kullanıcı koruması (koruma kapısı vb.) etkin değildir.
T2
(Manuel Yüksek Hız)
Test işletimi için kullanılır.
Program Modu hızı, programlanmış hıza göredir.
Jog Modu: Yok.
Güvenlik Uyarıları:
Programlama ve öğretme işlemi yapılamaz.
Kullanıcı koruması (koruma kapısı vb.) etkin değildir.
T2 çalışma modu, uygulamanın daha yüksek hızda testi gerektiğinde
kullanılmalıdır.
AUT
(Otomatik)
Üst kontrol ünitesi olmayan endüstriyel robotlar için kullanılır.
Program Modu hızı, programlanmış hıza göredir.
Jog Modu: Yok.
Güvenlik Uyarıları:
Güvenlik ve koruma tertibatları mevcut ve tam işler durumda olmalıdır.
Tüm kişiler, koruma tertibatlarıyla sınırlandırılmış bölgenin dışında
olmalıdır.
AUT EXT
(Otomatik Harici)
Üst düzey kontrol sistemi (PLC) olan endüstriyel robotlar için kullanılır.
Program Modu hızı, programlanmış hıza göredir.
Jog Modu: Yok.
Güvenlik Uyarıları:
Güvenlik ve koruma tertibatları mevcut ve tam işler durumda olmalıdır.
Tüm kişiler, koruma tertibatlarıyla sınırlandırılmış bölgenin dışında
olmalıdır.

ERPE-METEG
58
Tablo 3.3. Güvenlik Fonksiyonlarının Çalışma Moduna bağlı olarak geçerlilikleri
Güvenlik Fonksiyonu Çalışma Modu
T1 T2 AUT AUT EXT
Operatör Güvenliği (Operator Safety) Aktif Aktif
Acil Durdurma (Emergency Stop) Aktif Aktif Aktif Aktif
Onay Anahtarı (Enabling Device) Aktif Aktif
Manuel Mod (Programlama ve Öğretme)
Program doğrulama süresince azaltılmış hız Aktif
Elle Sürme (Jog Mode)
Program çalışması için Onay Anahtarı Gerektirir Aktif Aktif
Yazılım Limit Şalteri (Software Limit Switch) Aktif Aktif Aktif Aktif
3. Bölüm: Temel Robot Kullanımı
59
No Endüstriyel Robot
Çalışma Modunun Değiştirilmesi
Y
3-4
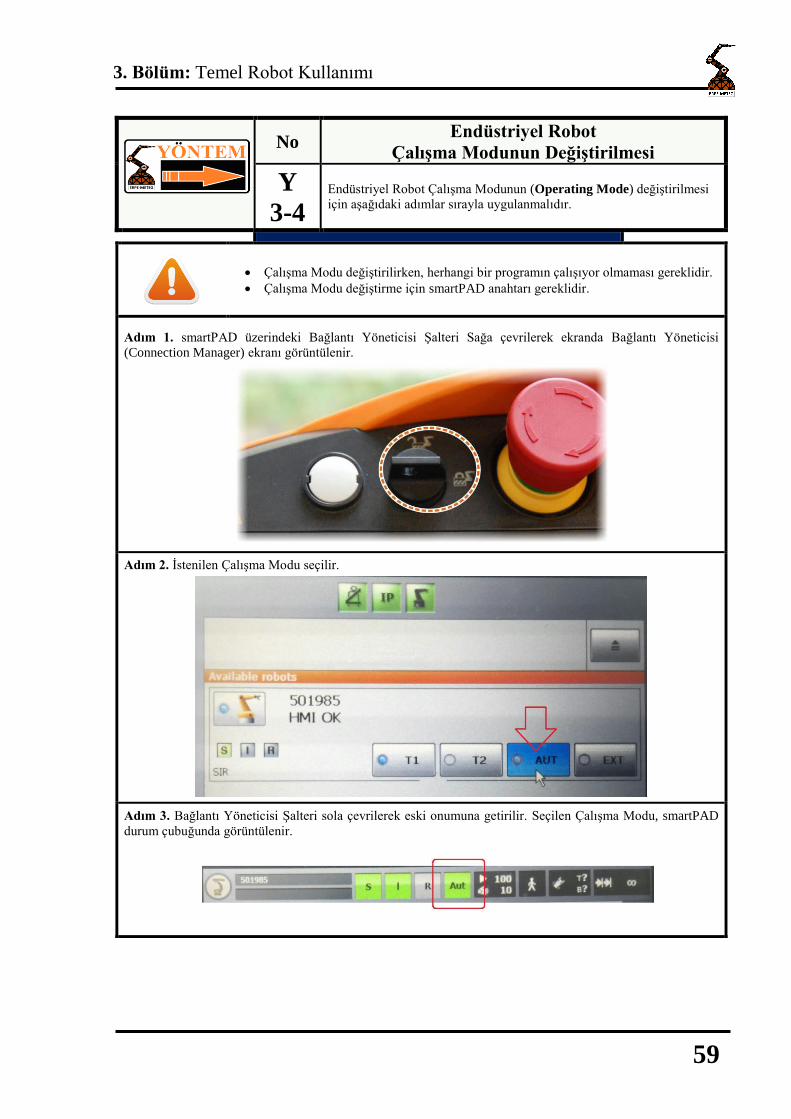
Endüstriyel Robot Çalışma Modunun (Operating Mode) değiştirilmesi
için aşağıdaki adımlar sırayla uygulanmalıdır.
Çalışma Modu değiştirilirken, herhangi bir programın çalışıyor olmaması gereklidir.
Çalışma Modu değiştirme için smartPAD anahtarı gereklidir.
Adım 1. smartPAD üzerindeki Bağlantı Yöneticisi Şalteri Sağa çevrilerek ekranda Bağlantı Yöneticisi
(Connection Manager) ekranı görüntülenir.
Adım 2. İstenilen Çalışma Modu seçilir.
Adım 3. Bağlantı Yöneticisi Şalteri sola çevrilerek eski onumuna getirilir. Seçilen Çalışma Modu, smartPAD
durum çubuğunda görüntülenir.

ERPE-METEG
60
3.4. Endüstriyel Robot Güncel Pozisyon Bilgisi
Endüstriyel Robot pozisyonu 2 farklı şekilde ifade edilebilmektedir:
1. Aksa Özgü Robot Pozisyonu
2. Kartezik Robot Pozisyonu
3.4.1. Aksa Özgü Robot Pozisyonu
Aksa Özgü Robot Pozisyonunda, Endüstriyel Robotun her bir aksı için ayrı ayrı olmak üzere Güncel Eksen Açı
Değerleri görüntülenmektedir. Bu açı değerleri, robotun ayar pozisyonuna bağlı mutlak açı değerlerini ifade
etmektedir.
Şekil 3.11’de endüstriyel robotun Aksa Özgü güncel pozisyonu görülmektedir. Endüstriyel robot A1 - A6 akslarının
yanı sıra eğer varsa E1 - E6 harici akslara ait pozisyonlar da görüntülenmektedir. Pozisyon değerleri robot hareket
etmesiyle birlikte güncellenerek gösterilmektedir. Endüstriyel Robot aksa özgü güncel pozisyon verileri
$AXIS_ACT adlı sistem değişkeninde tutulmaktadır.
$AXIS_ACT = {A1…, A2…, A3…, A4…, A5…, A6…, A6…}
Şekil 3.11. Aksa Özgü Endüstriyel Robot Pozisyonu

3. Bölüm: Temel Robot Kullanımı
61
3.4.2. Kartezyen Robot Pozisyonu
Kartezyen Robot Pozisyonu, TCP'nin Base veya World Koordinat Sistemine göre olan pozisyonudur. Burada
dikkat edilmesi gereken 2 önemli husus mevcuttur:
1. Tool Koordinat Sistemi seçilmiş değilse, Flange Koordinat Sistemi geçerlidir.
2. Base Koordinat Sistemi seçilmiş değilse, World Koordinat Sistemi geçerlidir.
Şekil 3.12’de endüstriyel robotun Kartezyen güncel pozisyonu görülmektedir. Aksa Özgü pozisyonda olduğu gibi
Kartezik Pozisyon değerleri de robot hareket etmesiyle birlikte güncellenerek gösterilmektedir. Kartezyen Robot
Pozisyonu TCP’ye ait aşağıdaki verileri içermektedir:
X, Y, Z güncel pozisyonu
A, B, C oryantasyon
Status ve Turn
Endüstriyel Robot kartezyen güncel pozisyon verileri $POS_ACT adlı sistem değişkeninde tutulmaktadır.
$POS_ACT = {X…, Y…, Z…, A…, B…, C…, S…, T…, E1…, E2…, E3…, E4…, E5…, E6…}
Şekil 3.12. Kartezyen Robot Pozisyonu

ERPE-METEG
62
No Endüstriyel Robot Pozisyonunun Öğrenilmesi
Y
3-5
Endüstriyel Robotun Pozisyonunu Aksa Özgü (Axis-specific) ve
Kartezyen (Cartesian) olarak öğrenmek için aşağıdaki adımlar sırayla
uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Display Actual position seçilir.
Adım 2. Pencerenin sağ tarafında Axis-specific / Cartesian seçimi yapılarak, Endüstriyel Robotun anlık
pozisyon verileri elde edilebilmektedir.

3. Bölüm: Temel Robot Kullanımı
63
No Dijital I/O Görüntüleme
Y
3-6
Endüstriyel Robotun Dijital Input/Output görüntülenmesi için aşağıdaki
adımlar sırayla uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Display Inputs/outputs Digital I/O seçilir.
Adım 2. Digital I/O penceresinin alt kısmındaki sekmelerden yararlanarak Inputs veya Outputs seçimi
yapılabilmektedir.
1 I/O numarası
2 I/O değeri (Kırmızı ise TRUE)
3 SIM: I/O Simüle edilir.
SYS: I/O Write-Protected (Yazma Korumalı). Değer Sistem Değişkeninde tutulmaktadır.
4 I/O Adı
Buton Kullanım Açıklaması
-100 Geriye doğru 100 I/O gelir
+100 İleriye doğru 100 I/O gider.
Go to Girilen I/O numarası aranır.
Value I/O değeri TRUE/FALSE olarak değiştirilir. Toggle olarak çalışır ve Onay Anahtarı gereklidir.
Name Seçili I/O için mevcut Ad değiştirilebilir.

ERPE-METEG
64
No Analog I/O Görüntüleme
Y
3-7
Endüstriyel Robotun Analog Input/Output görüntülenmesi için aşağıdaki
adımlar sırayla uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Display Inputs/outputs Analog I/O seçilir.
Adım 2. Analog I/O penceresinin alt kısmındaki sekmelerden yararlanarak Inputs veya Outputs seçimi
yapılabilmektedir.
Buton Kullanım Açıklaması
Go to Girilen Analog I/O numarası aranır.
Voltage Sadece Output için -10 V .. +10 V aralığında REAL gerilim değeri girilir.
Name Seçili Analog I/O için mevcut Ad değiştirilebilir.
3. Bölüm: Temel Robot Kullanımı
65
No Değişken Değeri Görüntüleme ve Değiştirme
Y
3-8
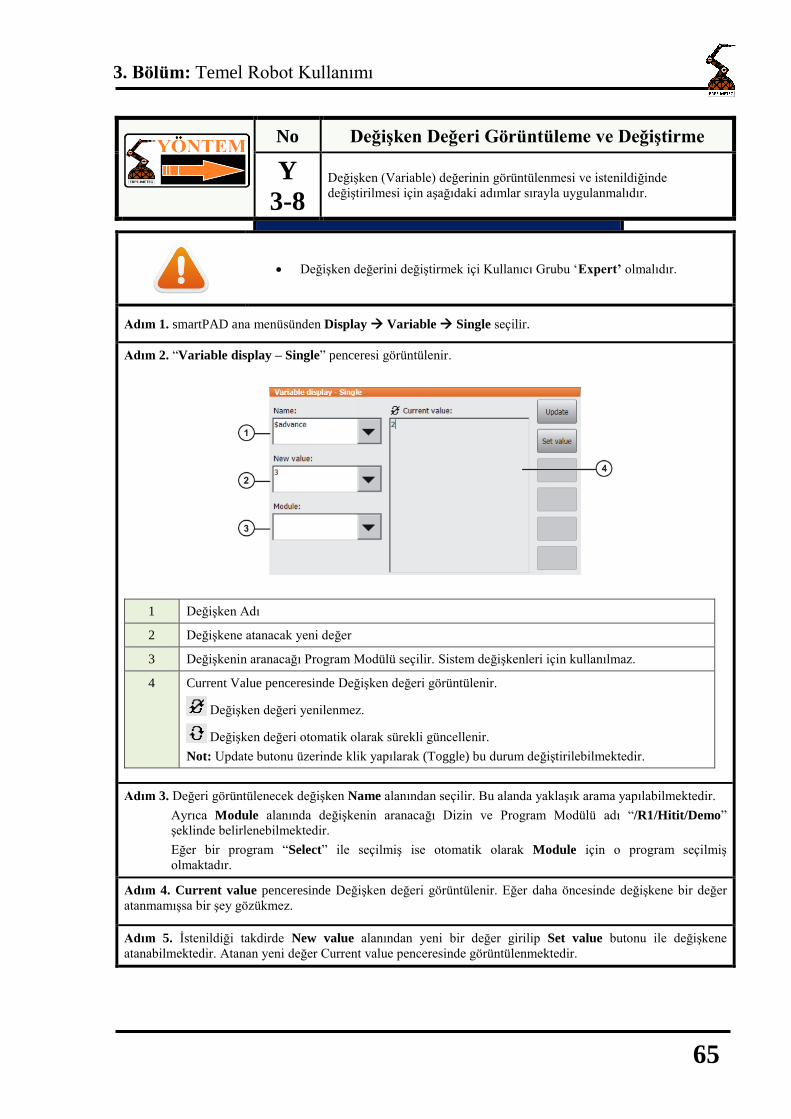
Değişken (Variable) değerinin görüntülenmesi ve istenildiğinde
değiştirilmesi için aşağıdaki adımlar sırayla uygulanmalıdır.
Değişken değerini değiştirmek içi Kullanıcı Grubu ‘Expert’ olmalıdır.
Adım 1. smartPAD ana menüsünden Display Variable Single seçilir.
Adım 2. “Variable display – Single” penceresi görüntülenir.
1 Değişken Adı
2 Değişkene atanacak yeni değer
3 Değişkenin aranacağı Program Modülü seçilir. Sistem değişkenleri için kullanılmaz.
4 Current Value penceresinde Değişken değeri görüntülenir.
Değişken değeri yenilenmez.
Değişken değeri otomatik olarak sürekli güncellenir.
Not: Update butonu üzerinde klik yapılarak (Toggle) bu durum değiştirilebilmektedir.
Adım 3. Değeri görüntülenecek değişken Name alanından seçilir. Bu alanda yaklaşık arama yapılabilmektedir.
Ayrıca Module alanında değişkenin aranacağı Dizin ve Program Modülü adı “/R1/Hitit/Demo”
şeklinde belirlenebilmektedir.
Eğer bir program “Select” ile seçilmiş ise otomatik olarak Module için o program seçilmiş
olmaktadır.
Adım 4. Current value penceresinde Değişken değeri görüntülenir. Eğer daha öncesinde değişkene bir değer
atanmamışsa bir şey gözükmez.
Adım 5. İstenildiği takdirde New value alanından yeni bir değer girilip Set value butonu ile değişkene
atanabilmektedir. Atanan yeni değer Current value penceresinde görüntülenmektedir.
ERPE-METEG
66
No Sayıcı (Counter) Görüntüleme
Y
3-9
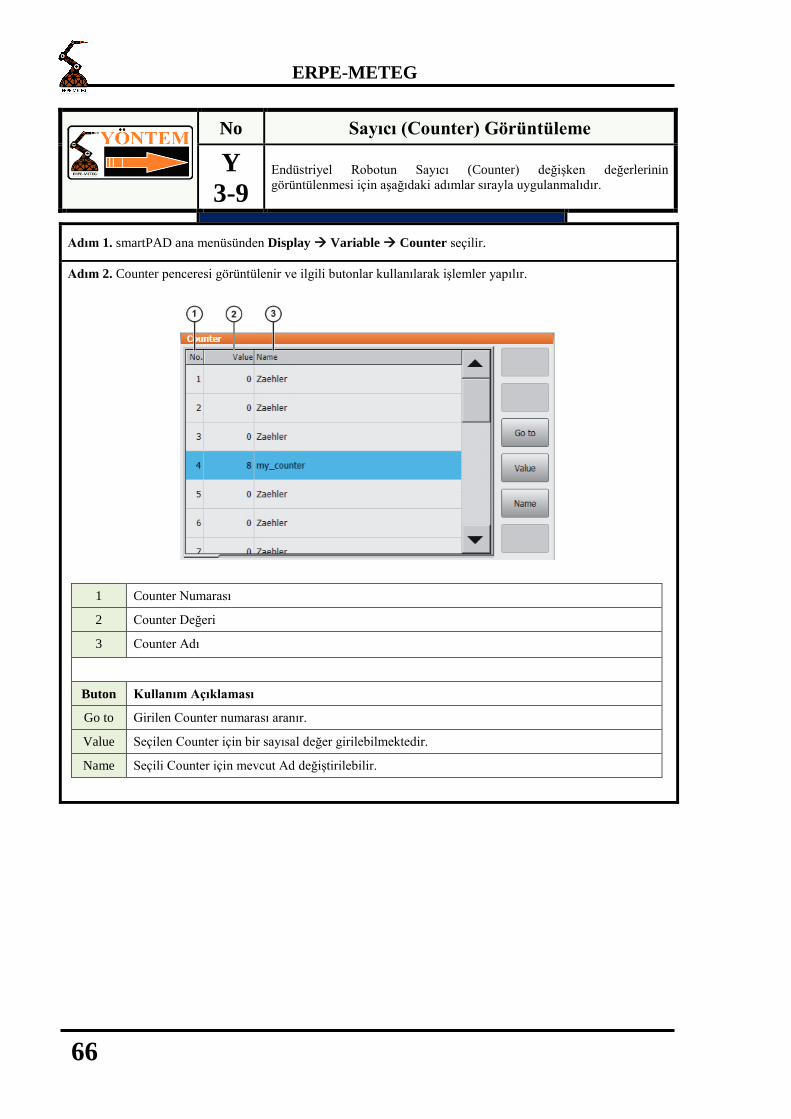
Endüstriyel Robotun Sayıcı (Counter) değişken değerlerinin
görüntülenmesi için aşağıdaki adımlar sırayla uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Display Variable Counter seçilir.
Adım 2. Counter penceresi görüntülenir ve ilgili butonlar kullanılarak işlemler yapılır.
1 Counter Numarası
2 Counter Değeri
3 Counter Adı
Buton Kullanım Açıklaması
Go to Girilen Counter numarası aranır.
Value Seçilen Counter için bir sayısal değer girilebilmektedir.
Name Seçili Counter için mevcut Ad değiştirilebilir.

3. Bölüm: Temel Robot Kullanımı
67
No Zamanlayıcı (Timer) Görüntüleme
Y
3-10
Endüstriyel Robotun Zamanlayıcı (Timer) değişken değerlerinin
görüntülenmesi için aşağıdaki adımlar sırayla uygulanmalıdır.
Adım 1. smartPAD ana menüsünden Display Variable Timer seçilir.
Adım 2. Timer penceresi görüntülenir ve ilgili butonlar kullanılarak işlemler yapılır.
1 Timer Numarası
2 Timer Status (Timer Aktif ise YEŞİL, Pasif ise KIRMIZI olarak gösterilir)
3 Timer State (Timer Değeri > 0 ise Timer Flag işaretini alır.)
4 Timer Değeri (ms)
5 Timer Adı
Buton Kullanım Açıklaması
Go to Girilen Timer numarası aranır.
State Seçilen Timer durumu TRUE/FALSE olarak değiştirilir. Toggle olarak çalışır ve Onay Anahtarı
gereklidir.
Value Seçilen Timer için bir sayısal değer girilebilmektedir.
Name Seçili Timer için mevcut Ad değiştirilebilir.

ERPE-METEG
68
No Robot Verilerini Görüntüleme ve Değiştirme
Y
3-11
Endüstriyel Robot verilerinin görüntülenmesi ve birtakım verilerin
güncellenmesi amacıyla aşağıdaki adımlar sırayla uygulanmalıdır.
Robot verilerini görüntülemek ve değiştirmek için;
T1 veya T2 Çalışma Modu aktif olmalıdır.
Herhangi bir program seçili olmamalıdır.
Değişiklikler ve Butonlar Uzman (Expert) Kullanıcı Yetkisi için geçerlidir.
Adım 1. smartPAD ana menüsünden Start-up Robot Data seçilir.
Adım 2. Robot Veri penceresinde görüntüleme ve değişiklikler yapılabilmektedir.
1 Robot Seri Numarası
2 Robot Çalışma Saati (Sürücüler Aktif olduğu sürece) (Değişken adı: $ROBRUNTIME)
3 Makine Veri Adı
4 Robot Adı
5 Ağ Arşivleme Hedef Yolu
6 Ağ Arşivleme için gerekli olan Domain/User Adı
7 Ağ Arşivleme için gerekli olan Domain/User Şifresi
8 Arşiv Dosya Adı belirlenir. (Alttaki CheckBox seçili değilse)
9 Arşiv Dosyası için ayrı bir isim tanımlanabilir.
Arşiv Dosyası için Robot Adı kullanılmaktadır.
Eğer Robot Adı boş ise varsayılan olarak ‘archive’ kabul edilir.

3. Bölüm: Temel Robot Kullanımı
69
Buton Açıklama
Sadece Konumsal Doğruluklu Robotlar için ilgilidir: Robot- Özel Mastering Ofset verili XML
dosyası, RDC’ye manuel olarak transfer edilebilir.
Butona basılmak suretiyle dizin yapısı görüntülenir. Güncel Seri Numaralı dosyayı içeren dizin
burada seçilir. Dosya seçilebilir ve RDC’ye transfer edilebilir.
Sadece Sabit Mastering İşaretli Robotlar için ilgilidir: Robot- Özel Mastering Ofset verili MAM
dosyası, RDC’ye manuel olarak transfer edilebilir.
Butona basılmak suretiyle dizin yapısı görüntülenir. Güncel Seri Numaralı dosyayı içeren dizin
burada seçilir. Dosya seçilebilir ve RDC’ye transfer edilebilir.
EMD Mastering Verili CAL dosyası, RDC’ye manuel olarak transfer edilebilir.
Butona basılmak suretiyle dizin yapısı görüntülenir. Güncel Seri Numaralı dosyayı içeren dizin
burada seçilir. Dosya seçilebilir ve RDC’ye transfer edilebilir.
Bu buton kullanılarak, RDC verileri geçici olarak C:\KRC\Roboter\RDC dizinine
yedeklenebilir.
Not: Robot kontrolör Reboot edildiğinde veya veriler arşivlendiğinde, bu dizin silinir.
Eğer RDC verileri kalıcı olarak tutulacaksa, başka bir yere yedeklenmelidir.

ERPE-METEG
70
3.5. Endüstriyel Robot Akslarının Hareket Ettirilmesi
Şekil 3.13’te 6 eksenli bir KUKA endüstriyel robotun serbestlik dereceleri (DOF – Degree of Freedom)
görülmektedir.
Şekil 3.13. KUKA Robot Serbestlik Dereceleri (DOF)
Endüstriyel Robotun her bir aksı sadece T1(Manuel Azaltılmış Hız) Çalışma Modunda ayrı ayrı hareket
ettirilebilmektedir. Robot hareketinin sürekli (Continuous) veya artımlı (Increment) olarak gerçekleştirilmesi Durum
Çubuğu (Status Bar) üzerinden ayarlanabilmektedir.
Tablo 3.4.’te Manuel Çalışma Moduna etki eden mesajlar, nedenleri ve çözüm önerileri görülmektedir.
Tablo 3.4. Manuel Çalışma Modunu etkileyen mesajlar
Mesaj Sebep Çözüm
“Etkin komutlar bloke edildi”
Etkin komutların kilitlenmesine
neden olan bir (Durdurma) Mesaj
veya Durum mevcut.
(Örneğin Acil-Durdurma basılı veya
sürücüler henüz hazır değil)
Acil-Durdurma kilitlemesi kaldırılır
ve mesaj penceresindeki mesajlar
onaylanır.
Onay verilir verilmez, sürücüler
kullanıma hazır hale gelir.
“Yazılım son şalteri-A2”
A2 aksında gidilmesi istenen yönde
Yazılım Son Şalteri ile ayarlanan
hareket sınırına gelinmesi.
A2 aksı ters yönde hareket
ettirilmelidir.

3. Bölüm: Temel Robot Kullanımı
71
No Endüstriyel Robot Akslarının Hareket Ettirilmesi
Y
3-12
Endüstriyel Robotun sahip olduğu aksları ayrı ayrı hareket ettirmek
mümkündür. Aksları ayrı ayrı hareket ettirmek için aşağıdaki adımlar
sırayla uygulanmalıdır.
DİKKAT
1. Çalışma Modu: Robotun manuel çalıştırılmasına sadece T1 (Manuel Azaltılmış Hız)
çalışma modunda izin verilmektedir. Manuel hareket hızı, T1 çalışma modunda
maksimum 250 mm/s'dir. Çalışma Modu, Bağlantı Yöneticisi üzerinden
ayarlanmaktadır.
2. Onay Anahtarı: Robotu manuel hareket ettirebilmek için, smartPAD onay
anahtarının orta konumda basılı tutulması gerekmektedir.
3. Yazılım Son Şalteri
Robot hareketi, aksa özel hareket esnasında Yazılım Son Şalterlerinin pozitif ve negatif
azami değerleriyle sınırlandırılmaktadır. Ancak mesaj penceresinde "Ayar (Mastering)
Yapın" vb. mesajı görüntülenirse bu sınırlar aşılabilmektedir. Bu durum robot sistemine
zarar verebilir.
Adım 1. Hareket Tuşları için koordinat sistemi Axes (Akslar) seçilir.

ERPE-METEG
72
Adım 2. Hareket hızı, Hand-Override ile istenilen % değere ayarlanır.
Adım 3. Onay Anahtarı orta konumda basılı tutulur. Bu esnada Hareket Tuşları ve A1..A6 akslar ekranda
görünür.
Adım 4. Hareket Tuşları ile istenilen yönde hareket yapılır. Bir aksı pozitif veya negatif yönde ilgili eksende
hareket ettirmek için (+) veya (-) hareket tuşuna basılır.

3. Bölüm: Temel Robot Kullanımı
73
No Acil Durumlarda Kumanda Olmadan
Endüstriyel Robotun Hareket Ettirilmesi
Y
3-13
Endüstriyel Robot, kaza veya arıza sonrasında serbest döndürme aleti
kullanılarak mekanik olarak hareket ettirilebilir. Bu yöntem sadece
insanların kurtarılması gibi özel ve acil durumlarda kullanılabilir.
Serbest Döndürme Aleti kullanarak Endüstriyel Robotun istenen aksının
mekanik olarak hareket ettirilmesi amacıyla aşağıdaki adımlar sırayla
uygulanmalıdır.
DİKKAT
Motor sıcaklıklarına dikkat edilmeli ve koruyucu eldiven kullanılmalıdır.
Serbest Döndürme Aleti ile motor hareketi, fren sistemlerine hasar verebilmektedir.
Ayrıca yaralanma ve maddi hasarla meydana gelebilmektedir.
Serbest Döndürme Aletinin kullanılması, ilgili motorun değiştirilmesini gerektirir.
Adım 1. Robot kumandası kapatılır ve tekrar açılmasını önlemek için asma kilit vb. donanımla emniyete alınır.
Adım 2. Motordaki koruyucu kapak çıkartılır. Serbest döndürme aleti ilgili motora yerleştirilmek suretiyle Aks
istenen yönde hareket ettirilir.
S.N. Açıklama
S.N. Açıklama
1 Kapalı koruma başlıklı motor 4 Motora serbest döndürme aletini yerleştirme
2 Motorun koruma başlığını çıkarma 5 Serbest döndürme aleti
3 Koruma başlığı çıkarılmış motor 6 Dönme yönünü gösteren levha (opsiyonel)

ERPE-METEG
74
3.6. Endüstriyel Robot Koordinat Sistemleri
Endüstriyel robotların kullanımı, programlanması ve devreye alınması işlemlerinde koordinat sistemleri büyük bir
öneme sahiptir. Şekil 3.14’te Endüstriyel Robot için ROBROOT, WORLD, FLANGE, TOOL ve BASE olmak
üzere toplam 5 koordinat sistemi tanımlanmıştır. Tablo 3.5’te ise Endüstriyel Robot Koordinat Sistemleri ayrıntılı
bir şekilde ifade edilmiştir.
Şekil 3.14. KUKA Endüstriyel Robot Koordinat Sistemleri
Tablo 3.5. Endüstriyel Robot Koordinat Sistemleri
Koordinat Sistemi Tanım Yeri Kullanım Özellik
WORLD Serbest ROBROOT,
BASE Orijini Genellikle Robot ayağında yer almaktadır.
ROBROOT Robot Ayağı Robot Orijini Dünya Koordinat Sistemine göre
Robot pozisyonunu tarif etmektedir.
BASE Serbest İş parçaları,
Düzenekler
Dünya Koordinat Sistemine göre
Base pozisyonunu tarif etmektedir.
FLANGE Robot Flanşı TOOL Orijini Orijin, Robot Flanş merkezidir.
TOOL Serbest Aletler Alet Koordinat Sistemi kaynağı TCP’dir.
TCP (Tool Center Point-Alet Merkez Noktası)

3. Bölüm: Temel Robot Kullanımı
75
3.7. Koordinat Sisteminde Robot Hareket Türleri
Endüstriyel Robotlar, bir koordinat sisteminde Ötelemeli (Translational) ve Dönel (Rotational) olmak üzere iki
farklı türde hareket ettirilebilmektedir.
Ötelemeli Hareket: Bir robotun koordinat sisteminin oryantasyon yönleri boyunca doğrusal olarak X, Y, Z
eksenlerindeki hareket türüdür. Eksene bağlı olarak (+) ve (-) yönde olmak üzere +X, -X, +Y, -Y, +Z, -Z yön
hareketleri yapılabilmektedir.
Dönel Hareket: Bir robotun koordinat sisteminin oryantasyon yönleri etrafında döndürülerek A, B, C
açılarında hareket türüdür. Dönüş yönüne bağlı olarak (+) ve (-) yönde bir açıda +A, -A, +B, -B , +C, -C açısal
hareketler yapılabilmektedir.
Şekil 3.15’te Kartezyen Koordinat Sistemi görülmektedir. Burada X, Y, Z Ötelemeli ve A, B, C Dönel hareket
türleri arasında X - C, Y - B ve Z - A ilişkileri görülmektedir. Böylelikle X ekseni etrafında A açısı, Y ekseni
etrafında B açısı ve Z ekseni etrafında da A açısı ile dönel hareket yapılmaktadır.
Şekil 3.15. Kartezyen Koordinat Sistemi
Şekil 3.16’da görüldüğü gibi; Sağ El Kuralına göre baş parmak Öteleme Yönünü (+X, + Y, + Z) gösterirken, diğer
dört parmağın sarmal yönü Dönme Yönünü (+C, +B, +A) göstermektedir.
Şekil 3.16. Sağ El Kuralına göre Dönme Yönünün bulunması
Bir hareket komutu verildiğinde Kontrolör sistemi ilk olarak bir yol hesaplamaktadır. Yolun başlangıç noktası alet
referans noktasıdır (TCP – Tool Center Point). Yolun yönü dünya koordinat sistemiyle belirlenmektedir. Kontrolör
sistemi tüm aksları, alet bu yolda ötelenecek veya dönecek şekilde düzenlemektedir.

ERPE-METEG
76
3.8. World Koordinat Sisteminde Robot Hareketi
Şekil 3.17’de World Koordinat Sisteminde manuel sürme prensibi görülmektedir.
Şekil 3.17. World Koordinat Sisteminde elle sürme prensibi
3.8.1. World Koordinat Sistemi Avantajları
World Koordinat Sisteminin kullanılmasının sağladığı avantajlar şu şekilde sıralanabilir:
Robotun hareketi her zaman öngörülebilir durumdadır.
Hareketler daima kesindir çünkü başlangıç noktası ve koordinat yönleri daima bilinmektedir.
World Koordinat Sistemi ayarlı bir robotta her zaman için kullanılabilir.
6D Mouse ile sezgisel bir kullanım mümkündür. Manuel hareket için ideal seçimdir.
3.8.2. World Koordinat Sistemi Temel Özellikleri
World Koordinat Sisteminin temel özellikleri şu şekilde sıralanabilir:
Robot Aleti, World Koordinat Sisteminin koordinat yönlerine göre hareket ettirilebilir. Bu esnada kontrolör
tarafından gerekli görülen robot aksları hareket eder. Bu amaçla KUKA smartPAD Hareket Tuşları veya
6D Mouse kullanılabilmektedir.
Standart ayarda World Koordinat Sistemi, ROBROOT’ta yer almaktadır.
Robot Hızı, (Hand-Override: HOV) ile değiştirilebilmektedir
Elle Robot hareketi sadece T1 - Çalışma Modunda mümkün olmaktadır.
Robot Hareketi için Onay Anahtarı orta konumda basılı olmalıdır.

3. Bölüm: Temel Robot Kullanımı
77
No World Koordinat Sisteminde Robot Hareketi
(Translational - Ötelemeli)
Y
3-14
Endüstriyel Robotu, World Koordinat Sisteminde hareket ettirmek için
aşağıdaki adımlar sırayla uygulanmalıdır.
Adım 1. Hareket Tuşları koordinat sistemi World Koordinat Sistemi seçilir.
Adım 2. 6D Space Mouse kullanımı için KCP pozisyonu Ayar Çubuğu (1) kaydırılarak ayarlanır.
ERPE-METEG
78
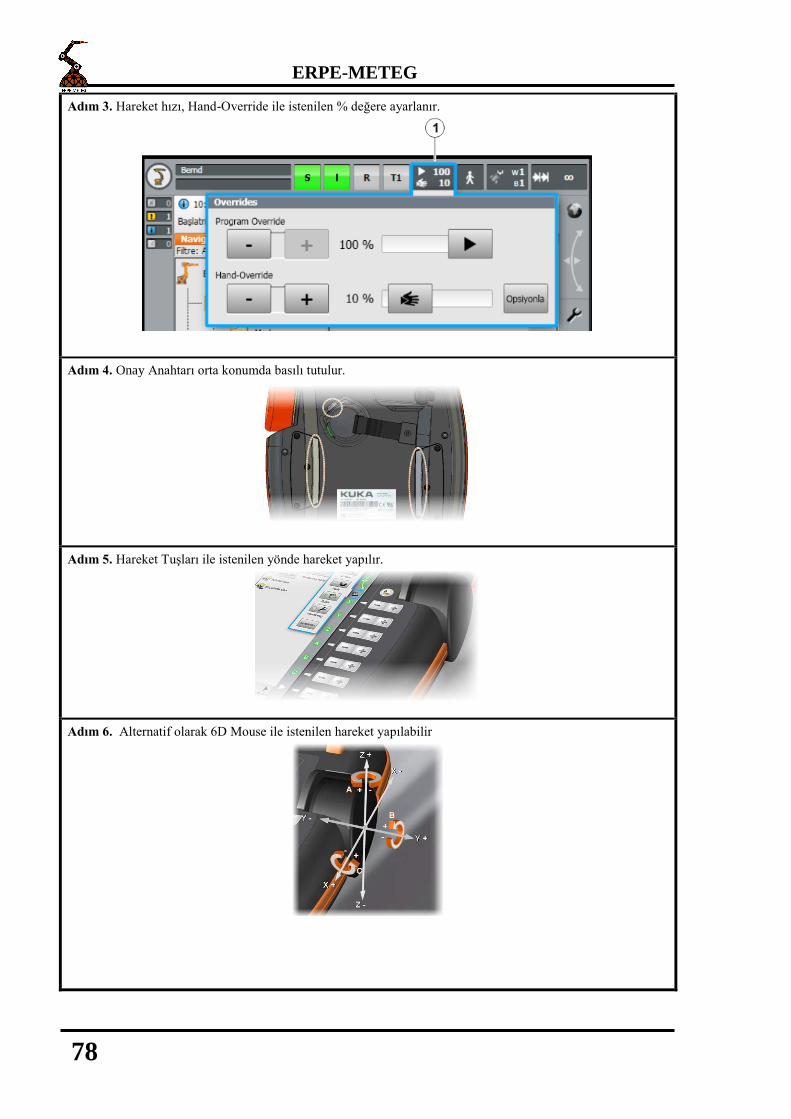
Adım 3. Hareket hızı, Hand-Override ile istenilen % değere ayarlanır.
Adım 4. Onay Anahtarı orta konumda basılı tutulur.
Adım 5. Hareket Tuşları ile istenilen yönde hareket yapılır.
Adım 6. Alternatif olarak 6D Mouse ile istenilen hareket yapılabilir

3. Bölüm: Temel Robot Kullanımı
79
3.9. Tool Koordinat Sisteminde Robot Hareketi
Şekil 3.18’de Endüstriyel Robotta Tool Koordinat Sistemi görülmektedir.
Şekil 3.18. Robot Tool Koordinat Sistemi
3.9.1. Tool Koordinat Sistemi Avantajları
Alet Koordinat Sisteminin kullanılmasının sağladığı avantajlar şu şekilde sıralanabilir:
Tool Koordinat Sistemi bilindiğinde robotun hareketi daima öngörülebilir olmaktadır.
Tool etkime yönünde hareket yapma veya TCP etrafında yöneltme yapma mümkündür.
Tool etkime yönü, aletin çalışma veya proses yönüdür. Örneğin bir yapıştırma nozulunda yapıştırıcının
çıkış yönü, bir iş parçası kavrandığında kavrama yönüdür.
3.9.2. Tool Koordinat Sistemi Temel Özellikleri
Tool Koordinat Sisteminin temel özellikleri şu şekilde sıralanabilir:
Tool Koordinat Sisteminde bir robot, daha önce ölçümlemesi yapılmış bir aletin koordinat yönlerine göre
hareket ettirilebilmektedir. Dolayısıyla Tool Koordinat Sistemi yere bağlı değildir, robot tarafından
yönlendirilmektedir. Bu esnada gerekli tüm robot eksenleri hareket eder. Hangi aksların hareket edeceği
sistem tarafından harekete bağlı olarak belirlenir.
Tool Koordinat Sisteminin başlangıç noktası TCP olarak adlandırılmaktadır ve aletin çalışma noktasına
karşılık gelmektedir.
Tool için X, Y, Z ötelemeli (Translational) ve A, B, C dönel (Rotational) hareket yapılabilmektedir.
Hareket için KUKA smartPAD Hareket Tuşları veya 6D Mouse kullanılabilmektedir.
16 farklı alet için koordinat sistemi seçilebilmektedir.
Robot Hızı, (Hand-Override: HOV) ile değiştirilebilmektedir
Elle Robot hareketi sadece T1 - Çalışma Modunda mümkün olmaktadır.
Robot Hareketi için Onay Anahtarı orta konumda basılı olmalıdır.
Kalibrasyon yapılmamış Alet için Koordinat Sistemleri manuel hareket sırasında her zaman için Flange
Koordinat Sistemine karşılık gelmektedir.
ERPE-METEG
80
No Tool Koordinat Sisteminde Robot Hareketi
Y
3-15
Endüstriyel Robotu, Tool Koordinat Sisteminde hareket ettirmek için
aşağıdaki adımlar sırayla uygulanmalıdır.
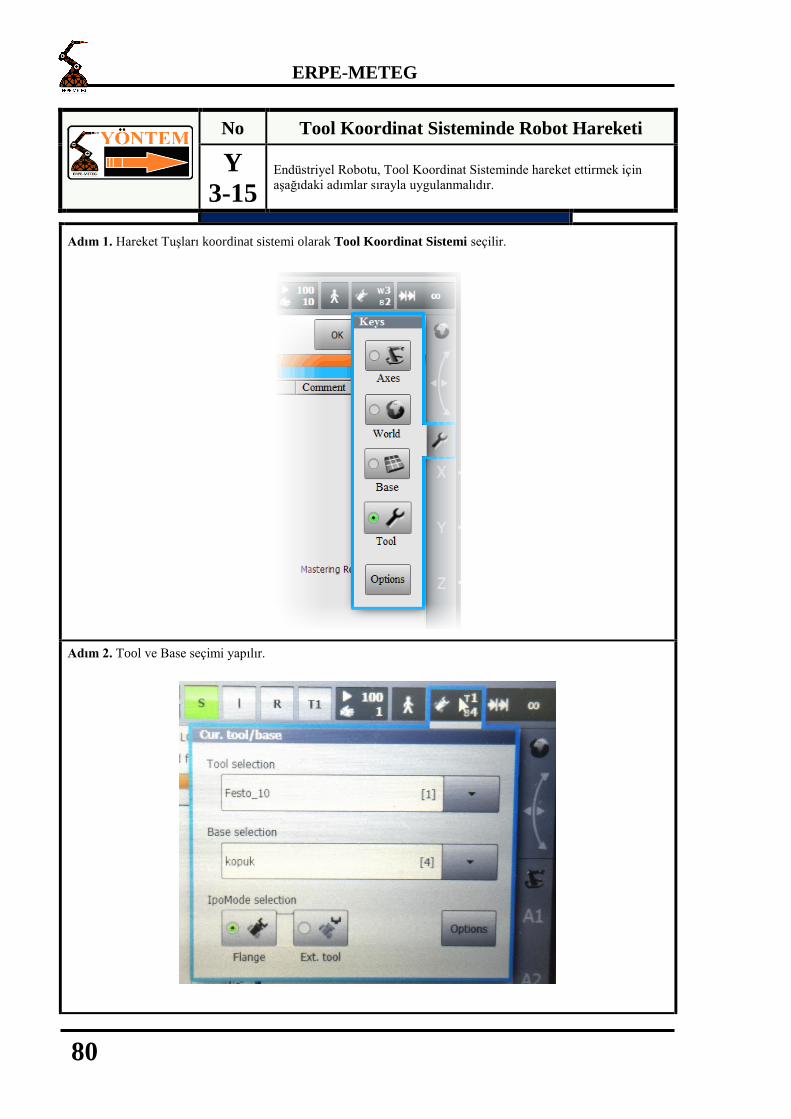
Adım 1. Hareket Tuşları koordinat sistemi olarak Tool Koordinat Sistemi seçilir.
Adım 2. Tool ve Base seçimi yapılır.

3. Bölüm: Temel Robot Kullanımı
81
Adım 3. Robot Hareket hızı, Hand-Override ile istenilen % değere ayarlanır.
Adım 4. Onay Anahtarı orta konumda basılı tutulur.
Adım 5. Hareket Tuşları ile istenilen yönde hareket yapılır.
Adım 6. Alternatif olarak 6D Mouse ile istenilen hareket yapılabilir

ERPE-METEG
82
3.10. Base Koordinat Sisteminde Robot Hareketi
Şekil 3.19’da Endüstriyel Robotta Base Koordinat Sistemi görülmektedir.
Şekil 3.19. Base Koordinat Sisteminde manuel sürüş
3.10.1. Base Koordinat Sistemi Avantajları
Base Koordinat Sisteminin kullanılmasının sağladığı avantajlar şu şekilde sıralanabilir:
Base Koordinat Sistemi bilindiğinde robotun hareketi öngörülebilmektedir.
6D Mouse ile sezgisel bir kullanım mümkündür. Bu kullanım için operatörün robota veya Base Koordinat
Sistemine göre doğru durması gerekmektedir.
3.10.2. Base Koordinat Sistemi Temel Özellikleri
Base Koordinat Sisteminin temel özellikleri şu şekilde sıralanabilir:
Robotun taşıdığı alet, Base Koordinat Sisteminin koordinat yönlerine göre hareket ettirilebilir.
Hareket için smartPAD Hareket Tuşları veya 6D Mouse kullanılabilmektedir.
32 farklı Base için koordinat sistemi ayarlanabilmektedir..
Elle Robot hareketi hızı, (Hand-Override: HOV) ile değiştirilebilmektedir
Elle Robot hareketi sadece T1 - Çalışma Modunda mümkündür.
Robot Hareketi için Onay Anahtarı orta konumda tutulmalıdır.
3. Bölüm: Temel Robot Kullanımı
83
No Base Koordinat Sisteminde Robot Hareketi
Y
3-16
Endüstriyel Robotu, Base Koordinat Sisteminde hareket ettirmek için
aşağıdaki adımlar sırayla uygulanmalıdır.
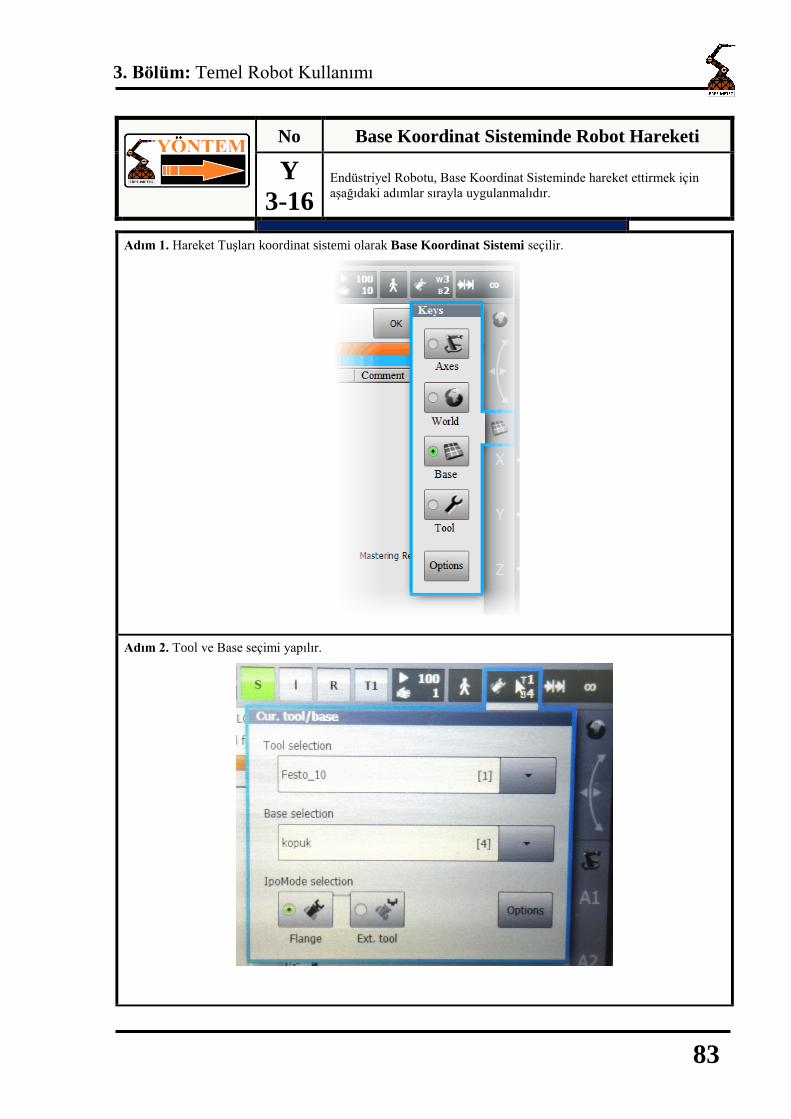
Adım 1. Hareket Tuşları koordinat sistemi olarak Base Koordinat Sistemi seçilir.
Adım 2. Tool ve Base seçimi yapılır.

ERPE-METEG
84
Adım 3. Hareket hızı, Hand-Override ile istenilen % değere ayarlanır.
Adım 4. Onay Anahtarı orta konumda basılı tutulur.
Adım 5. Hareket Tuşları ile istenilen yönde hareket yapılır.
Adım 6. Alternatif olarak 6D Mouse ile istenilen hareket yapılabilir

3. Bölüm: Temel Robot Kullanımı
85
3.11. Harici Alet ile Endüstriyel Robot Hareketi
Şekil 3.20’de Endüstriyel Robotta Harici Alet (Sabit Duran Alet) kullanımı görülmektedir.
Şekil 3.20. Sabit Duran Aletle manuel sürüş
3.11.1. Harici Alet Kullanım Avantajları
Endüstriyel robot sistemlerinde, bazı uygulamalarda Alet yerine işlenen parçanın elleçlenmesi gerekebilmektedir.
Bu tür uygulamalarda Harici Alet kullanımı söz konusudur. Harici Alet kullanılmasına yönelik uygulama alanları şu
şekilde sıralanabilir:
Yapıştırma uygulamaları,
Silikon uygulamaları,
Kaynak uygulamaları,
Kesme uygulamaları vb.
3.11.2. Harici Alet Kullanımı Temel Özellikleri
Harici Alet kullanılmasına yönelik temel özellikleri şu şekilde sıralanabilir:
Harici Alet, sabit duran bir nesne olmasına rağmen kendisine ait koordinat sistemi olan bir External TCP
referans noktasına sahiptir.
Hareketli İş Parçası, Tool olarak kaydedilir. Bu sayede TCP’ye göre İş Parçası kenarı boyunca bir hareket
mümkün olabilmektedir.
Harici Alet, Base olarak kaydedilir.

ERPE-METEG
86
No Harici Alet ile Endüstriyel Robot Hareketi
Y
3-17
Endüstriyel Robotu, Harici Aletle hareket ettirmek için aşağıdaki adımlar
sırayla uygulanmalıdır.
Harici Alet uygulamalarında; öncelikle hem Harici Alet TCP'si hem de işlenen parça
kalibrasyonu yapılmış olmalıdır.
Adım 1. Hareket Tuşları koordinat sistemi olarak Tool Koordinat Sistemi seçilir.
Adım 2. Tool ve Base seçimi yapılır.
Tool : Robot tarafından taşınan parça seçilir.
Base : Harici Alet (Ext.Tool) seçimi yapılır.
IpoMode : Ext. tool ayarına getirin.
3. Bölüm: Temel Robot Kullanımı
87
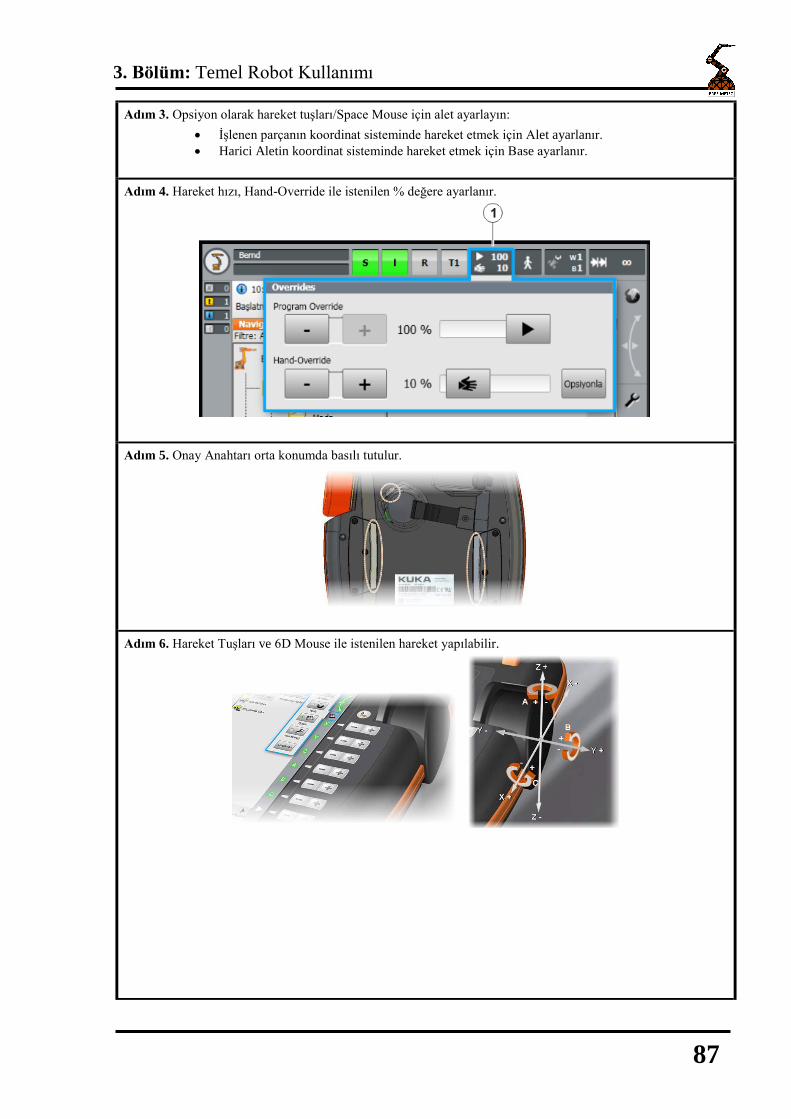
Adım 3. Opsiyon olarak hareket tuşları/Space Mouse için alet ayarlayın:
İşlenen parçanın koordinat sisteminde hareket etmek için Alet ayarlanır.
Harici Aletin koordinat sisteminde hareket etmek için Base ayarlanır.
Adım 4. Hareket hızı, Hand-Override ile istenilen % değere ayarlanır.
Adım 5. Onay Anahtarı orta konumda basılı tutulur.
Adım 6. Hareket Tuşları ve 6D Mouse ile istenilen hareket yapılabilir.

ERPE-METEG
88
3.12. Uygulamalar
No Uygulama Konusu
U
3-1 Endüstriyel Robot Aks Hareket Uygulaması
Endüstriyel Robotu, ilgili aksları hareket ettirerek A - F pozisyonlarına getiriniz.
(A) - Pozisyonu
(B) - Pozisyonu
Robot Aks Açı Robot Aks Açı
A1 0
A1 0
A2 0 A2 -90
A3 0 A3 0
A4 0 A4 0
A5 0 A5 0
A6 0 A6 0
(C) - Pozisyonu
(D) - Pozisyonu
Robot Aks Açı Robot Aks Açı
A1 0
A1 0
A2 -180 A2 -90
A3 0 A3 90
A4 0 A4 0
A5 0 A5 0
A6 0 A6 0
(E) - Pozisyonu
(F) - Pozisyonu
Robot Aks Açı Robot Aks Açı
A1 0
A1 0
A2 -180 A2 -120
A3 90 A3 -120
A4 0 A4 0
A5 0 A5 90
A6 0 A6 0
3. Bölüm: Temel Robot Kullanımı
89
No Uygulama Konusu
U
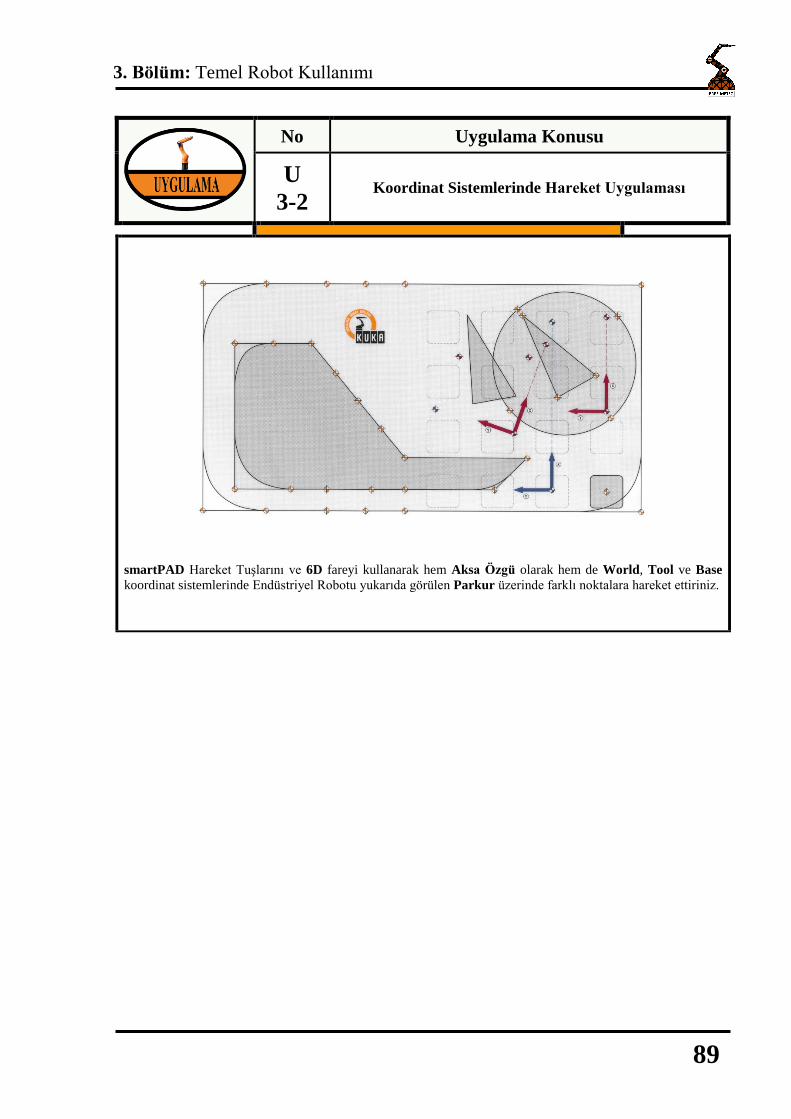
3-2 Koordinat Sistemlerinde Hareket Uygulaması
smartPAD Hareket Tuşlarını ve 6D fareyi kullanarak hem Aksa Özgü olarak hem de World, Tool ve Base
koordinat sistemlerinde Endüstriyel Robotu yukarıda görülen Parkur üzerinde farklı noktalara hareket ettiriniz.

ERPE-METEG
90
3.13. Bölüm Çalışma Soruları
Soru 1. Aşağıdakilerden hangisi Endüstriyel Robot çalışma modlarından biri değildir?
a) T1 b) T2 c) T3 d) AUT
Soru 2. Endüstriyel Robot T1 çalışma modu ile ilgili olarak aşağıdaki ifadelerden hangisi yanlıştır?
a) Test işletimi, programlama ve öğretme için kullanılır.
b) Kullanıcı koruması (koruma kapısı) etkindir.
c) Program Modu için azami hız 250 mm/s
d) Jog Modu (Test ve Doğrulama) için azami hız 250 mm/s
Soru 3. I - Test işletimi, programlama ve öğretme için kullanılır.
II - Program Modu için azami hız 250 mm/s
III - Jog Modu (Test ve Doğrulama) için azami hız 250 mm/s
Yukarıda verilen özellikler Endüstriyel Robutun hangi çalışma moduna aittir?
a) T1 b) T3 c) AUT d) AUT EXT
Soru 4. I - Üst düzey kontrol sistemi (PLC) olan endüstriyel robotlar için kullanılır.
II - Program Modu hızı, programlanmış hıza göredir.
III - Jog Modu: Yok.
Yukarıda verilen özellikler hangi çalışma moduna aittir?
a) T1 b) T3 c) AUT d) AUT EXT
Soru 5. KUKA Agilus robot için 6 eksen aks açı değerleri aşağıdakilerden hangisinde doğru olarak verilmiştir?
A1 A2 A3 A4 A5 A6
a) 90 -180 90 0 90 0
b) 0 90 0 0 -180 90
c) 0 -180 90 0 0 0
d) 90 0 0 -180 0 90
Soru 6. Yazılım Limit Şalteri (Software Limit Switch) bir KUKA robotun hangi Çalışma Modlarında aktiftir?
a) Sadece T1 ve T2 b) Sadece AUT ve AUT EXT
c) Sadece T1, T2 ve AUT d) T1, T2, AUT ve AUT EXT
Soru 7. Onay Anahtarı (Enabling Switch) ve Elle Sürme (Jogging) bir KUKA robotun hangi Çalışma Modlarında
aktiftir?
a) Sadece T1 ve T2 b) Sadece AUT ve AUT EXT
c) Sadece T1, T2 ve AUT d) T1, T2, AUT ve AUT EXT
Soru 8. Acil durdurma (Emergency Stop) bir KUKA robotun hangi Çalışma Modlarında aktiftir?
a) Sadece T1 ve T2 b) Sadece AUT ve AUT EXT
c) Sadece T1, T2 ve AUT d) T1, T2, AUT ve AUT EXT

3. Bölüm: Temel Robot Kullanımı
91
Soru 9. Sağ El Kuralına göre; bir koordinat sisteminde Ötelemeli (Translational) ve Dönel (Rotational) hareketler
hangi seçenekte doğru olarak verilmiştir?
a) b) c) d)
Soru 10. Kartezyen Robot Pozisyonu, TCP'nin Base veya World Koordinat Sistemine göre olan pozisyonudur.
Burada dikkat edilmesi gereken 2 önemli husus mevcuttur:
1. Tool Koordinat Sistemi seçilmiş değilse, …………(I)………... Koordinat Sistemi geçerlidir.
2. Base Koordinat Sistemi seçilmiş değilse, ………...(II)……….. Koordinat Sistemi geçerlidir.
Yukarıda verilen ifadede (I) ve (II) numaralı boşluğa gelecek doğru seçenek aşağıdakilerden hangisidir?
a) b) c) d)
I - World Robroot Flange Axes
II - Flange Axes World Robroot

ERPE-METEG
92
Related Documents











