224 FINAL PROJECT- 224 FINAL PROJECT- WIRELESS CONTROL OF A BOE-BOT WIRELESS CONTROL OF A BOE-BOT Tom Cohlmia-Scott Moffat-Ashley Nidiffer- Tom Cohlmia-Scott Moffat-Ashley Nidiffer- Eric Yim Eric Yim

224 FINAL PROJECT- WIRELESS CONTROL OF A BOE-BOT Tom Cohlmia-Scott Moffat-Ashley Nidiffer-Eric Yim.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

224 FINAL PROJECT-224 FINAL PROJECT-WIRELESS CONTROL OF A BOE-BOTWIRELESS CONTROL OF A BOE-BOT
Tom Cohlmia-Scott Moffat-Ashley Nidiffer-Eric YimTom Cohlmia-Scott Moffat-Ashley Nidiffer-Eric Yim
ObjectiveObjective
Our goal in this project was to use Our goal in this project was to use wireless technology to control a robot wireless technology to control a robot along a given path.along a given path.
To accomplish this we will integrate the To accomplish this we will integrate the Basic stamp and LabView programs.Basic stamp and LabView programs.

PartsParts Assembled Boe-Bot, Parallax Robotic Kit Assembled Boe-Bot, Parallax Robotic Kit
#28132#28132 Blue Tooth Wireless Adapter, DBT120Blue Tooth Wireless Adapter, DBT120 Wireless Card, eb500Wireless Card, eb500 Gyroscope, ADXRS150EBGyroscope, ADXRS150EB
Hardware ChallengesHardware Challenges Basic Stamp Chip malfunctionedBasic Stamp Chip malfunctioned Wireless card communication failureWireless card communication failure
ADC Chip was not providedADC Chip was not provided

CalibrationCalibration
Run servo motors at 750 and zero the motionRun servo motors at 750 and zero the motion
Run the robot in a circle, record time and Run the robot in a circle, record time and angular distanceangular distance
Use LabView to record the Gyroscope outputUse LabView to record the Gyroscope output Graph the angular velocities vs. output voltageGraph the angular velocities vs. output voltage
GyroscopeGyroscope
Servo MotorsServo Motors
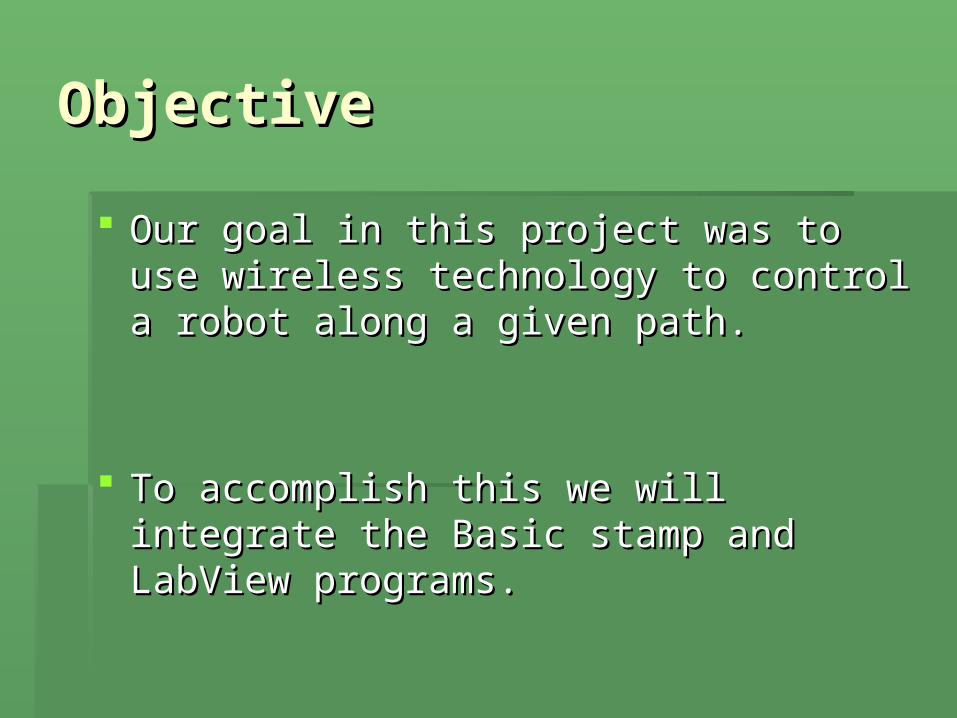
Angular Angular VelocityVelocity vs. Voltage vs. Voltage
y = 92.214x - 236.41
R2 = 0.9989
-300
-200
-100
0
100
200
0 1 2 3 4 5
Angular Velocity
Vo
ltag
e
data
Linear (data)
Calculate the linear equations of the lineCalculate the linear equations of the line
WirelessWireless
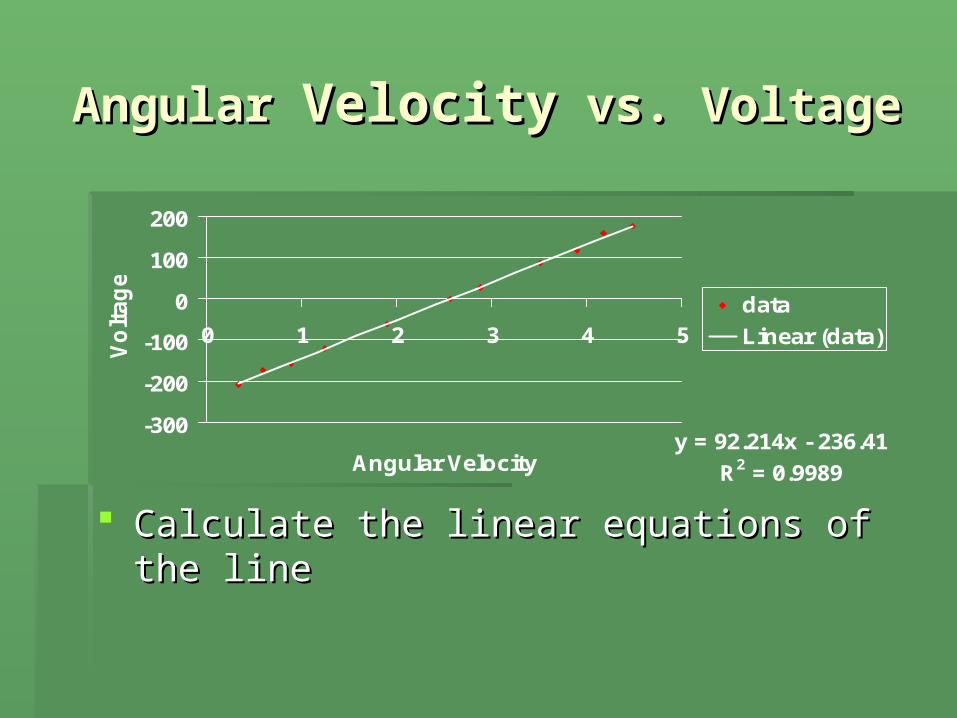
Learned Bluetooth Learned Bluetooth softwaresoftware
Sent and Received text Sent and Received text wirelesslywirelessly

ProgramingPrograming
We used 2 programming languages in this We used 2 programming languages in this project: LabView and Basic Stamp.project: LabView and Basic Stamp.
LabViewLabView Basic StampBasic Stamp
GyroscopeGyroscope
Basic StampBasic Stamp
Calibration of servo motorsCalibration of servo motors Calibration of GyroscopeCalibration of Gyroscope
Servo MotorServo Motor

LabViewLabView
Used to Record Gyroscope Calibration Used to Record Gyroscope Calibration DataData
Configure LabView to connect to Configure LabView to connect to BluetoothBluetooth
Write a LabView program to control Boe-Write a LabView program to control Boe-BotBot

Final ProgramsFinal Programs
Final LabView front panelFinal LabView front panel
Final LabView Block DiagramFinal LabView Block Diagram

Detail of Final LabView programDetail of Final LabView program

Basic Stamp final programBasic Stamp final program

DemonstrationDemonstration

ConclusionConclusion
Limits:Limits: Lack of ADC chipLack of ADC chip Speed of communication Speed of communication
of the wireless of the wireless Accuracy of LabView Accuracy of LabView
angle calibrationangle calibration
Next Steps:Next Steps: Install and wire an ADC Install and wire an ADC
chipchip Integrate the gyroscope Integrate the gyroscope
into the LabView into the LabView programprogram
Integrate feedback into Integrate feedback into programprogram
Related Documents