Lecture 12 – Tuesday, March 5 2.04A Spring ’13 Today’s goal • Root Locus examples and how to apply the rules – single pole – single pole with one zero – two real poles – two real poles with one zero – three real poles – three real poles with one zero • Extracting useful information from the Root Locus – transient response parameters – limit gain for stability 1

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

Lecture 12 – Tuesday, March 52.04A Spring ’13
Today’s goal
• Root Locus examples and how to apply the rules– single pole– single pole with one zero– two real poles– two real poles with one zero– three real poles– three real poles with one zero
• Extracting useful information from the Root Locus– transient response parameters– limit gain for stability
1

X(s)Y (s)
✓X(s)
Y (s)
◆
OL
=1
s+ 2
✓X(s)
Y (s)
◆
CL
=K
s+ 2 +K
As K varies from 0 to 1 . . .
K = 0K = 1
Lecture 12 – Tuesday, March 52.04A Spring ’13
Root Locus definition
• Root Locus is the locus on the complex plane of closed-loop poles as the feedback gain is varied from 0 to ∞.
2
+
�K G(s) =
1
s+ 2G(s) =
1
s+ 2
Y (s) X(s)
�2
�
j!Open-Looppole
�2
�
j!Open-LooppoleRoot Locus
Lecture 12 – Tuesday, March 52.04A Spring ’13
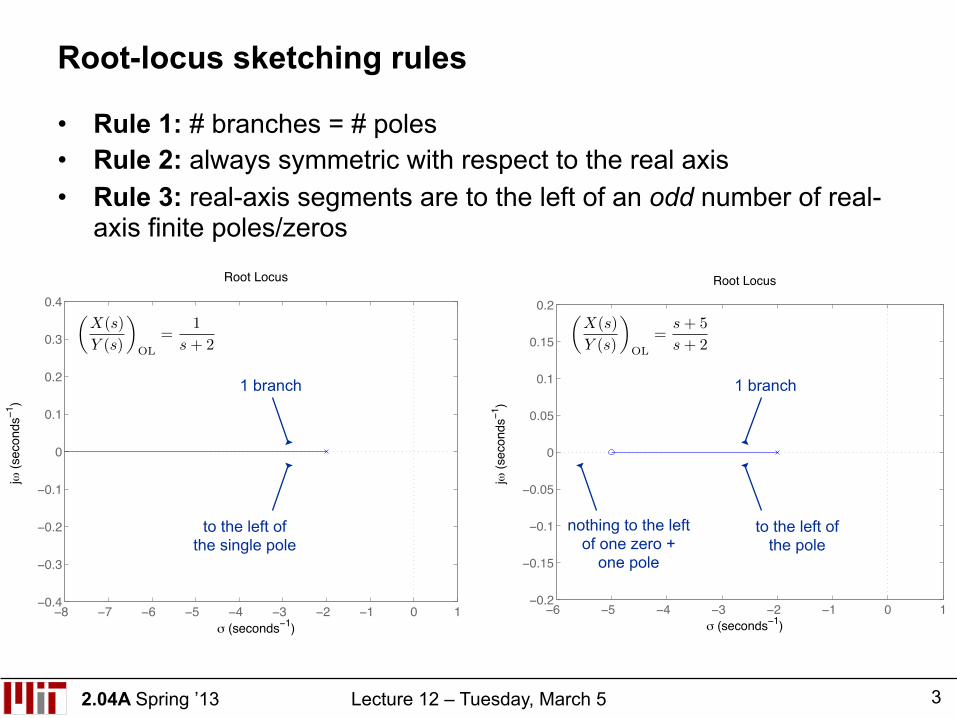
Root-locus sketching rules
• Rule 1: # branches = # poles• Rule 2: always symmetric with respect to the real axis• Rule 3: real-axis segments are to the left of an odd number of real-
axis finite poles/zeros
3
−8 −7 −6 −5 −4 −3 −2 −1 0 1−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
✓X(s)
Y (s)
◆
OL
=1
s+ 2
−6 −5 −4 −3 −2 −1 0 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
✓X(s)
Y (s)
◆
OL
=s+ 5
s+ 2
1 branch
to the left of the single pole
1 branch
to the left of the pole
nothing to the leftof one zero +
one pole

✓X(s)
Y (s)
◆
CL
=K (s+ 5)
(K + 1) s+ (5K + 2)✓
closed–loop
pole
◆= �5K + 2
K + 1
! �5, as K ! 1
✓X(s)
Y (s)
◆
CL
=K
s+ (K + 2)✓
closed–loop
pole
◆= � (K + 2) ! �1, as K ! 1
Lecture 12 – Tuesday, March 52.04A Spring ’13
Root-locus sketching rules
• Rule 4: begins at poles, ends at zeros
4
−6 −5 −4 −3 −2 −1 0 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
✓X(s)
Y (s)
◆
OL
=s+ 5
s+ 2
1 branch
to the left of the pole
nothing to the leftof one zero +
one pole
K = 0K = 1
−8 −7 −6 −5 −4 −3 −2 −1 0 1−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
✓X(s)
Y (s)
◆
OL
=1
s+ 2
1 branch
to the left of the single pole
K = 0K = 1
We say that this TF has a “zero at infinity”
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 3)
✓a = ⇡/2�a = �2
Lecture 12 – Tuesday, March 52.04A Spring ’13
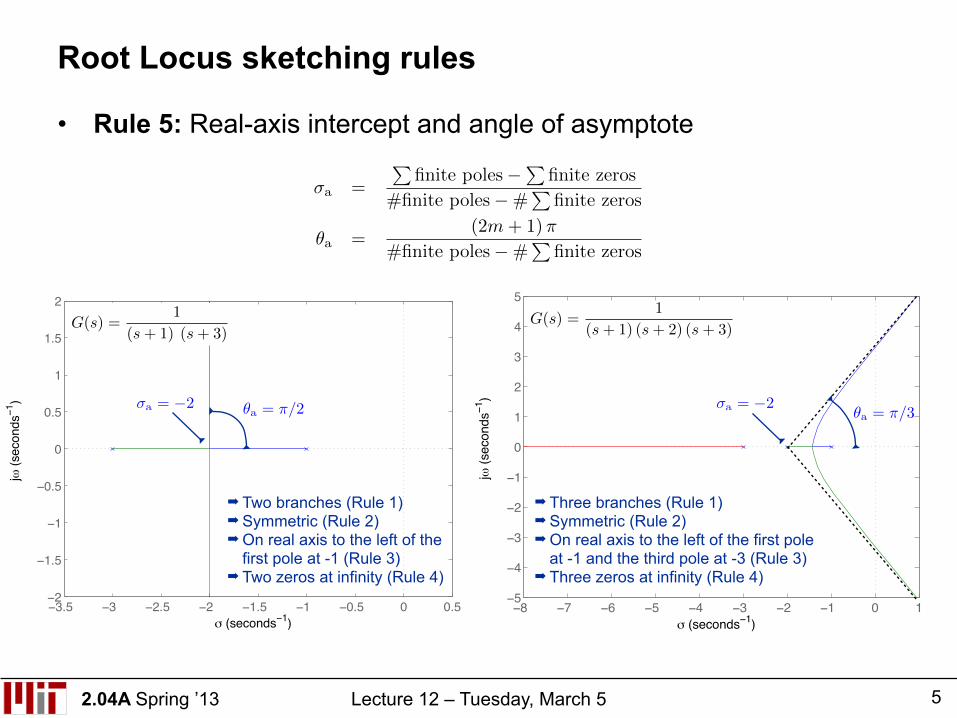
Root Locus sketching rules
• Rule 5: Real-axis intercept and angle of asymptote
5
➡ Two branches (Rule 1)➡ Symmetric (Rule 2)➡ On real axis to the left of the
first pole at -1 (Rule 3)➡ Two zeros at infinity (Rule 4)
−8 −7 −6 −5 −4 −3 −2 −1 0 1−5
−4
−3
−2
−1
0
1
2
3
4
5
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
➡ Three branches (Rule 1)➡ Symmetric (Rule 2)➡ On real axis to the left of the first pole
at -1 and the third pole at -3 (Rule 3)➡ Three zeros at infinity (Rule 4)
fi
�a =
Pnite poles�
Pfinite zeros
#finite poles�#
Pfinite zeros
✓a =
(2m+ 1)⇡
#finite poles�#
Pfinite zeros
�a = �2✓a = ⇡/3

Solve
X
n
1
�b � zn=
X
q
1
�b � pq
Lecture 12 – Tuesday, March 52.04A Spring ’13
Root Locus sketching rules
• Rule 6: Real axis breakaway and break-in points σb
6
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2)
✓a = ⇡/2�a = �2
➡ Two branches (Rule 1)➡ Symmetric (Rule 2)➡ On real axis to the left of the
first pole at -1 (Rule 3)➡ Two zeros at infinity (Rule 4)
−8 −7 −6 −5 −4 −3 −2 −1 0 1−5
−4
−3
−2
−1
0
1
2
3
4
5
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
➡ Three branches (Rule 1)➡ Symmetric (Rule 2)➡ On real axis to the left of the first pole
at -1 and the third pole at -3 (Rule 3)➡ Three zeros at infinity (Rule 4)
�a = �2✓a = ⇡/3
�b = �2�b ⇡ �1.423
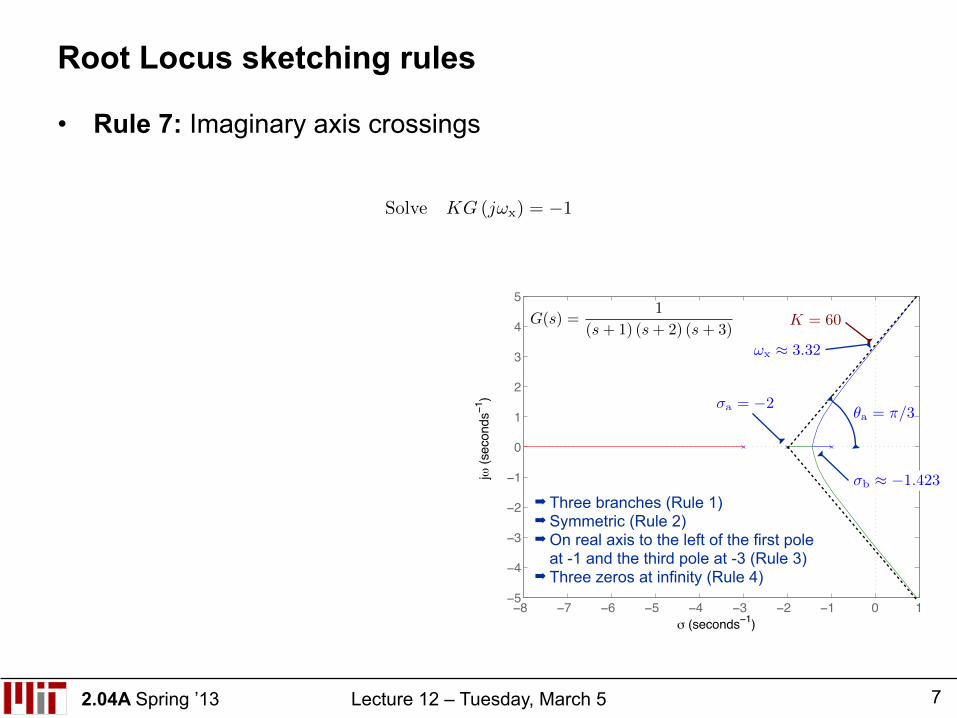
Solve KG (j!x
) = �1
Lecture 12 – Tuesday, March 52.04A Spring ’13
Root Locus sketching rules
• Rule 7: Imaginary axis crossings
7
−8 −7 −6 −5 −4 −3 −2 −1 0 1−5
−4
−3
−2
−1
0
1
2
3
4
5
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
➡ Three branches (Rule 1)➡ Symmetric (Rule 2)➡ On real axis to the left of the first pole
at -1 and the third pole at -3 (Rule 3)➡ Three zeros at infinity (Rule 4)
�a = �2✓a = ⇡/3
�b ⇡ �1.423
!x
⇡ 3.32
K = 60

Lecture 12 – Tuesday, March 52.04A Spring ’13
What else is the Root Locus telling us
• Gain = product of distances to the poles
8
−8 −7 −6 −5 −4 −3 −2 −1 0 1−5
−4
−3
−2
−1
0
1
2
3
4
5
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
p 12p 15p 20
p11
K = 60
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =1
(s+ 1) (s+ 2)
p2p 2
K = 2
Lecture 12 – Tuesday, March 52.04A Spring ’13
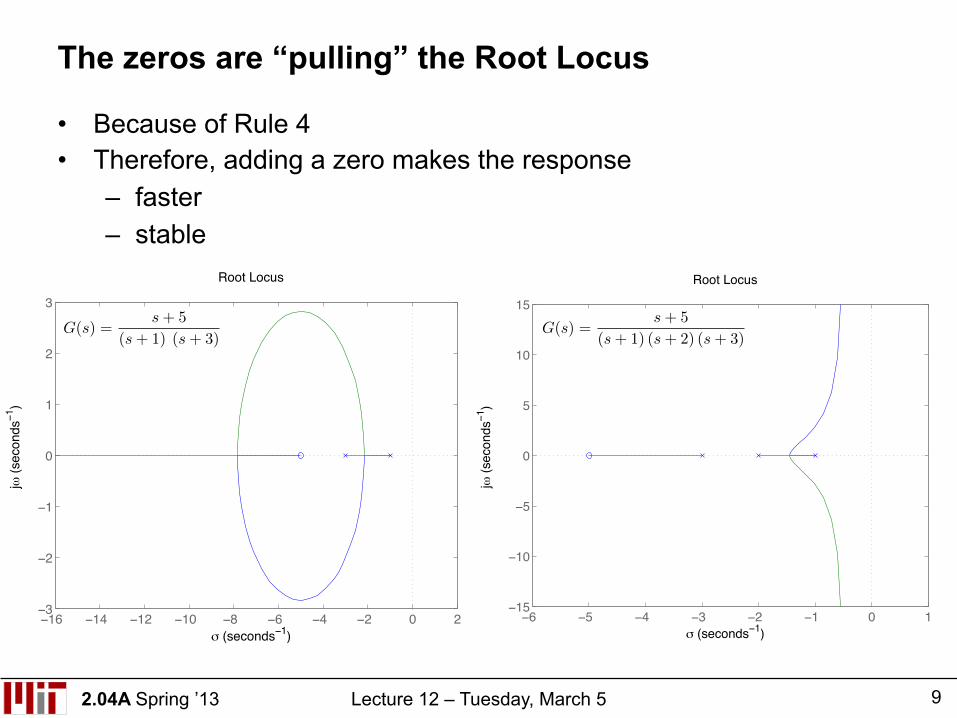
The zeros are “pulling” the Root Locus
• Because of Rule 4• Therefore, adding a zero makes the response
– faster– stable
9
−16 −14 −12 −10 −8 −6 −4 −2 0 2−3
−2
−1
0
1
2
3
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
−6 −5 −4 −3 −2 −1 0 1−15
−10
−5
0
5
10
15
Root Locus
m (seconds−1)
jt (s
econ
ds−1
)
G(s) =s+ 5
(s+ 1) (s+ 3)G(s) =
s+ 5
(s+ 1) (s+ 2) (s+ 3)

Lecture 12 – Tuesday, March 52.04A Spring ’13
Practice 1: Sketch the Root Locus
Nise Figure P8.2
10
© John Wiley & Sons. All rights reserved. This content is excluded from our CreativeCommons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/.

Lecture 12 – Tuesday, March 52.04A Spring ’13
Practice 2:Are these Root Loci valid? If not, correct them
Nise Figure P8.1
11
© John Wiley & Sons. All rights reserved. This content is excluded from our CreativeCommons license. For more information, see http://ocw.mit.edu/help/faq-fair-use/.

MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
Related Documents











