2001 Mars Odyssey page 1 W o r k s h o p H E N D - 2003 Institute for Space Research, June 9 - 11, 2003 Robotic algorithm of Robotic algorithm of HEND HEND detection of GRBs detection of GRBs V. Grinkov, A. Sanin, S. Charyshnikov, A. Kozyrev, M. Litvak, I. Mitrofanov, V. Tret’yakov Institute for Space Research K. Hurley Space Sciences Laboratory, University of California, Berkeley T. Cline NASA/Goddard Space Flight Center

2001 Mars Odyssey page 1 W o r k s h o p H E N D - 2003 Institute for Space Research, June 9 - 11, 2003 Robotic algorithm of HEND detection of GRBs V.
Dec 17, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

2001 Mars Odysseypage 1
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
Robotic algorithm of Robotic algorithm of HENDHEND detection of GRBsdetection of GRBs
V. Grinkov, A. Sanin, S. Charyshnikov, A. Kozyrev, M. Litvak, I. Mitrofanov, V. Tret’yakovInstitute for Space Research
K. HurleySpace Sciences Laboratory, University of California, Berkeley
T. ClineNASA/Goddard Space Flight Center
2001 Mars Odysseypage 2
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
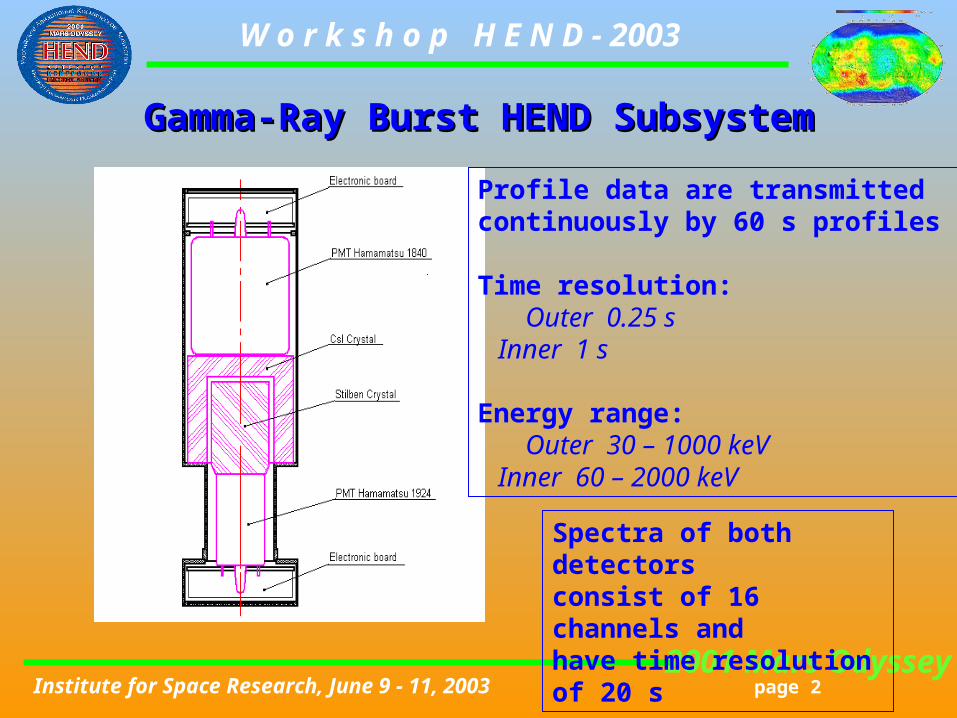
Gamma-Ray Burst HEND SubsystemGamma-Ray Burst HEND Subsystem
Profile data are transmitted continuously by 60 s profiles
Time resolution: Outer 0.25 s Inner 1 s
Energy range: Outer 30 – 1000 keV Inner 60 – 2000 keV
Spectra of both detectorsconsist of 16 channels andhave time resolution of 20 s

2001 Mars Odysseypage 3
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
t
GRBphase
Afterglowphase
1 second
1 minute 1 hour 1 day
1 month
0
This is the position where the GRB will be
registered

2001 Mars Odysseypage 4
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
I. Background Model,to know the background variations
II. Search for Events, to find possible candidates to be GRBs
III. Correlation Analysis, to eliminate non-burst events
Three main steps of the algorithm are as follows:

2001 Mars Odysseypage 5
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
I. Background modelI. Background model
1. Smoothing2. Weight determination3. Weighed smoothing4. Return to Step 2
The initial profile is smoothed with 70-bin window to derive a smoothed one

2001 Mars Odysseypage 6
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
1. Smoothing2. Weight determination3. Weighed smoothing4. Return to Step 2
I. Background modelI. Background model
In future smoothingeach bin will have its weightwhich is determined by the weight function (upper left)according to the differencebetween smoothed and initialprofiles

2001 Mars Odysseypage 7
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
1. Smoothing2. Weight determination3. Weighed smoothing4. Return to Step 2
I. Background modelI. Background model
Derived with the same window,new smoothed profilesubstitutes the old one

2001 Mars Odysseypage 8
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
1. Smoothing2. Weight determination3. Weighed smoothing4. Return to Step 2
I. Background modelI. Background model
Steps 2-3-4 are repeated 20 times until the smoothed profilerepresents a goodbackground estimate(green line at the picture)

2001 Mars Odysseypage 9
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
II. Search for eventsII. Search for events
1. Search for triggered bins and combine them into events2. Discard short events3. Stretch boundaries
All bins exceeding 6 std. dev. above the backgroundare treated as triggered.Neighboring triggered bins are combined into events.

2001 Mars Odysseypage 10
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
1. Search for triggered bins and combine them into events2. Discard short events3. Stretch boundaries
II. Search for eventsII. Search for events
Events shorter than 3 binsare discarded

2001 Mars Odysseypage 11
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
1. Search for triggered bins and combine them into events2. Discard short events3. Stretch boundaries
II. Search for eventsII. Search for events
35 bins are added to each side of the event.Some events will merge.

2001 Mars Odysseypage 12
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
The GRB gives signals both in the outer and inner SC (left),
III. Correlation analysisIII. Correlation analysis
The blue lines represent flux in the outer, and the green lines in the inner, detector
while the anomalous signal is
reflected only in the outer (down).
2001 Mars Odysseypage 13
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
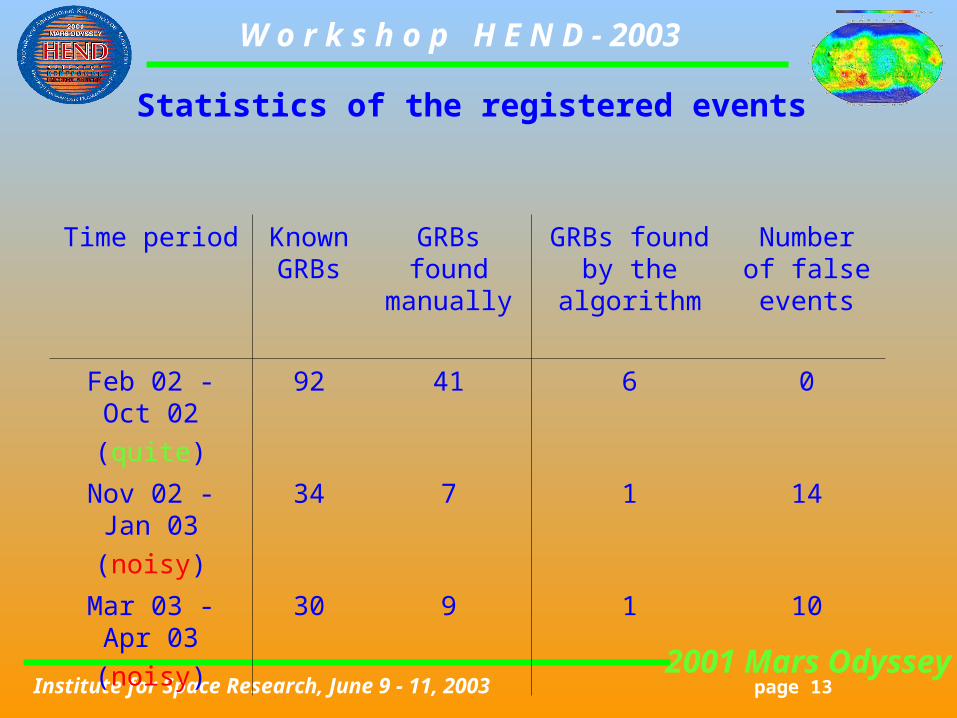
Time period Known GRBs
GRBs found manually
GRBs found by the algorithm
Number of false events
Feb 02 - Oct 02
(quite)
92 41 6 0
Nov 02 - Jan 03
(noisy)
34 7 1 14
Mar 03 - Apr 03
(noisy)
30 9 1 10
Statistics of the registered events

2001 Mars Odysseypage 14
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
The whole set of GRBs found by
the algorithm

2001 Mars Odysseypage 15
W o r k s h o p H E N D - 2003
Institute for Space Research, June 9 - 11, 2003
ConclusionsConclusions
1. An algorithm to search for bursts in HEND data was built.
2. The algorithm triggered 8 real and 24 false events during both quite and noisy data.
3. As an improvement of the algorithm spectral data procession must be added.
Related Documents











