2. Descomposición ortogonal propia en reducción de modelos En este capítulo se plantean las definiciones teóricas y las herramientas necesarias para abordar el problema de la reducción de modelos dinámicos. Inicialmente se realiza un estudio de la descomposición en valores singulares y una comparación con la descomposición en valores propios como también una aplicación en compresión de imágenes. Se presentan las definiciones necesarias para establecer formalmente una expansión general de funciones como una sumatoria de funciones base con sus respectivos coeficientes y la manera de generar modelos dinámicos de orden reducido por medio de una proyección de Galerkin sobre un subespacio de las funciones base. 2.1 Descomposición en valores singulares Dada una matriz ∈ , , y sea un conjunto ordenado de números no negativos las raíces cuadradas de los valores propios de , entonces, entonces existen matrices unitarias ∈ y ∈ tal que , y en donde ∈ es una matriz diagonal con los valores singulares de . A esta descomposición se la conoce como SVD (Singular Value Decomposition) y tiene múltiples aplicaciones en ciencias e ingeniería (Golub [13]). Propiedades: Asumamos que mientras que , y que las matrices son particionadas compatiblemente en dos bloques y que el primero de ellos tenga columnas, así: , ∈ , y (2.1) En donde tienen r, n-r columnas, y tienen r, m-r columnas respectivamente.

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
2. Descomposición ortogonal propia en reducción de modelos
En este capítulo se plantean las definiciones teóricas y las herramientas necesarias para abordar el problema de la reducción de modelos dinámicos. Inicialmente se realiza un estudio de la descomposición en valores singulares y una comparación con la descomposición en valores propios como también una aplicación en compresión de imágenes. Se presentan las definiciones necesarias para establecer formalmente una expansión general de funciones como una sumatoria de funciones base con sus respectivos coeficientes y la manera de generar modelos dinámicos de orden reducido por medio de una proyección de Galerkin sobre un subespacio de las funciones base.
2.1 Descomposición en valores singulares
Dada una matriz ∈ , , y sea un conjunto ordenado de números no negativos
las raíces cuadradas de los valores propios de , entonces,
entonces existen matrices unitarias ∈ y ∈ tal que , y en donde
∈ es una matriz diagonal con los valores singulares de . A esta descomposición se la conoce como SVD (Singular Value Decomposition) y tiene múltiples aplicaciones en ciencias e ingeniería (Golub [13]). Propiedades:
Asumamos que mientras que , y que las matrices son particionadas compatiblemente en dos bloques y que el primero de ellos tenga columnas, así:
,
∈ , y
(2.1)
En donde tienen r, n-r columnas, y tienen r, m-r columnas respectivamente.

28 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
1. Las columnas de U y V son los vectores propios de y respectivamente.
2. Los valores singulares de una matriz son únicos.
3.
4. Los cuatro espacios asociados con A son:
5. puede ser descompuesta como una suma de r términos de rango 1.
6. La norma de Frobenius de es
2.2 Estudio comparativo entre la SVD y la descomposición en valores propios
Definición 2.1: Una matriz nilpotente es una matriz cuadrada J que cumpla para cierto k entero positivo:
(2.2) El número k más pequeño se conoce como el grado de J Dada una matriz ∈ , existen matrices ∈ y ∈ , tal que
, en donde está en la forma de Jordan, es decir una suma directa de bloques de tamaño , así:
(2.3)
En donde
es una matriz nilpotente con unos en la superdiagonal (la diagonal
inmediatamente a la derecha de la diagonal principal) y ceros en las demás posiciones. A este tipo de descomposición se la conoce como la EVD (EigenValue Decomposition).
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 29
Todas las matrices cuadradas tienen una EVD como la anterior, en donde son los valores propios de A, y las columnas de X son vectores propios y generalizados de A.
La SVD y la EVD pueden ser reescritas como y respectivamente. Se puede observar que tanto la SVD como la EVD son descomposiciones que tienen la
forma general . Si se establece como en el caso de la EVD, es común encontrar que Z no es diagonal y que X no es ortogonal. En la SVD, la restricción es relajada y se cambia por el requerimiento de que tanto como sean unitarias
lo cual conlleva a que la matriz sea siempre diagonal y con elementos no negativos. Además, el hecho de no requerir que , la condición de que A sea una matriz cuadrada también se elimina en la SVD. Para ilustrar el análisis consideremos el siguiente ejemplo:
Sea
. Se puede evidenciar que los valores propios de A son 1 y 0, sin
importar el valor de , sin embargo, la SVD de A viene siendo:
El valor singular más grande de A es y depende de . Este simple ejemplo muestra que enormes cambios en los elementos de la matriz A no afectan los valores propios, a diferencia de los valores singulares que son muy sensibles a las variaciones de los elementos. Tanto la EVD como la SVD pueden ser utilizadas en reducción de modelos, pero como resultado del estudio preliminar realizado en descomposiciones, se decidió trabajar con la SVD basándonos en su estabilidad numérica. Estas descomposiciones son calculadas usando técnicas iterativas, por lo cual es necesario estudiar su convergencia.
Sea la SVD exacta de A, y sea la que se obtiene teniendo en cuenta errores de coma flotante. Se puede demostrar que:
, en donde (2.4) En donde es un polinomio de bajo orden comparado con el orden de la matriz, el
cual es dependiente de la precisión de máquina . Por lo tanto la SVD puede calcularse por algoritmos de atraso estables (Temam [27]). De la misma manera, se sabe que de acuerdo con la Desigualdad de Fan, dadas las matrices A y E se cumple: , para todo i. (2.5) Por lo tanto, , lo cual implica que la SVD también puede calcularse usando algoritmos de adelanto estables (Temam [27]). Entonces se puede concluir que el cálculo de la SVD de una matriz es estable y bien condicionado respecto
30 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
a perturbaciones aditivas, lo cual no se cumple para la EVD, por lo tanto es posible concluir que los algoritmos para calcular la SVD son más adecuados para la descomposición de matrices de gran tamaño.
2.3 Estudio de la aplicación de la SVD en aproximación óptima de matrices
La base de la reducción de modelos dinámicos es la aproximación de matrices de gran escala por otras de rango inferior de manera óptima en cierta norma. Este problema se puede plantear así: Dada una matriz ∈ , y el , encuentre una ∈ con tal que la norma-2 de la matriz error E = A – X se minimice. El siguiente teorema provee una solución a este problema (Antoulas [7]): Teorema 2.1. Schmidt-Eckart-Young-Mirsky: La mínima norma-2 de la matriz error, cuando X es la matriz óptima viene dada por la siguiente expresión:
(2.6) A partir de este resultado, se puede concluir que la matriz X puede ser construida de la siguiente manera:
(2.7) Es decir que la matriz X óptima puede ser construida como una sumatoria de matrices de rango 1. Las aproximaciones de bajo rango son consideradas un problema de reducción de modelos estático, pero tienen una importante aplicación en compresión de imágenes, tal como se verá a continuación. Los archivos de imágenes son almacenados como matrices (de gran escala), que contienen información numérica sobre la escala de colores en cada pixel.

Capítulo 2. Descomposición ortogonal propia en reducción de modelos 31
Figura 2.1 Imagen de Prueba para compresión usando SVD
La anterior imagen es almacenada como una matriz de datos ∈ . Se le aplicó la SVD para poder estudiar el espectro de valores singulares, el cual se muestra a continuación:
pixeles en x
pix
ele
s e
n y
EJEMPLO COMPRESION DE IMAGEN
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
32 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
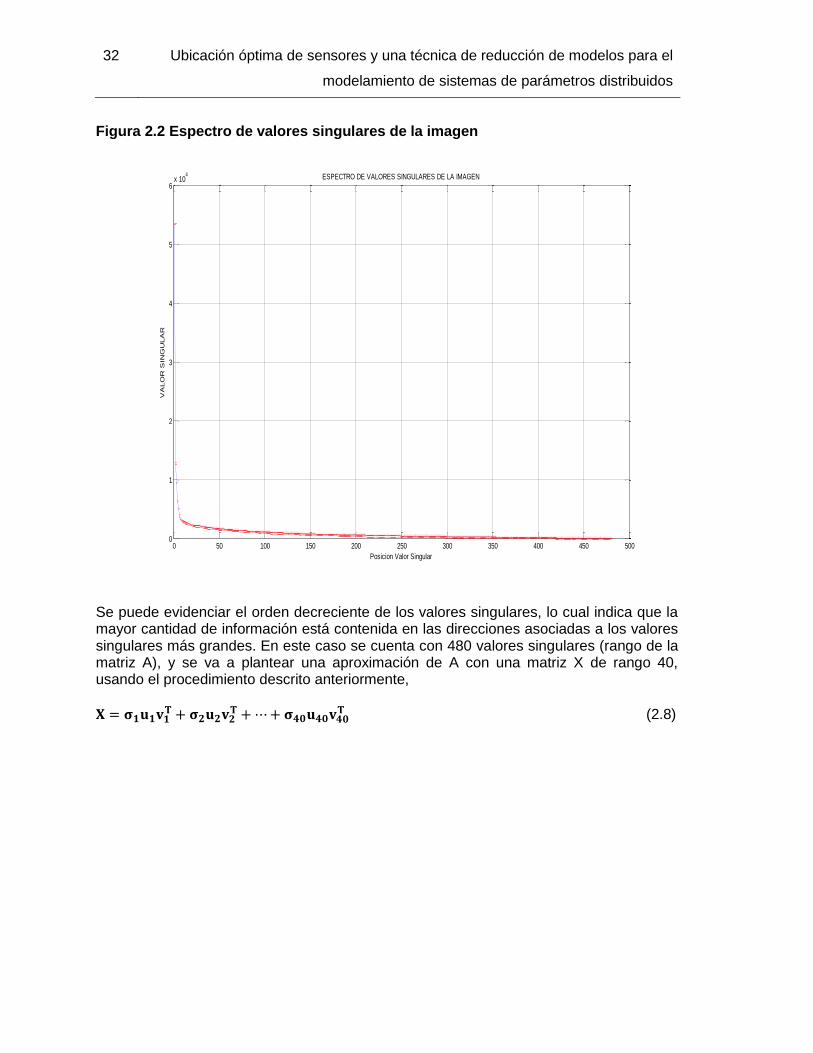
Figura 2.2 Espectro de valores singulares de la imagen
Se puede evidenciar el orden decreciente de los valores singulares, lo cual indica que la mayor cantidad de información está contenida en las direcciones asociadas a los valores singulares más grandes. En este caso se cuenta con 480 valores singulares (rango de la matriz A), y se va a plantear una aproximación de A con una matriz X de rango 40, usando el procedimiento descrito anteriormente,
(2.8)
0 50 100 150 200 250 300 350 400 450 5000
1
2
3
4
5
6x 10
4
Posicion Valor Singular
VA
LO
R S
ING
ULA
R
ESPECTRO DE VALORES SINGULARES DE LA IMAGEN

Capítulo 2. Descomposición ortogonal propia en reducción de modelos 33
Figura 2.3 Aproximación de la imagen con matriz de rango 40
Entonces la matriz error E de la imagen original es: Figura 2.4 Representación gráfica de la matriz error resultante de la aproximación de rango inferior
pixeles en x
pix
ele
s e
n y
COMPRESION DE LA IMAGEN USANDO UNA MATRIZ DE RANGO 40
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
pixeles en x
pix
ele
s e
n y
ERROR RESULTANTE DE LA APROXIMACION DE RANGO INFERIOR
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
34 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
2.4 Introducción a las bases ortonormales
Las bases ortonormales (funciones base) están muy relacionadas al concepto de espacios lineales, por lo tanto es necesario definir ciertas nociones algebraicas de esa teoría (Laub [18]), (Astrid [8]).
Definición 2.2. Un espacio vectorial lineal , definido sobre un campo escalar en ,
es un conjunto no vacio X con mapeo aditivo de a y con mapeo
multiplicativo escalar de a , cumple los siguientes axiomas:
Definición 2.3 Una combinación lineal de vectores definidos sobre un
espacio lineal es una expresión de la forma: (2.10)
En donde ∈ . Definición 2.4 Un conjunto de vectores es linealmente
independiente si:
Definición 2.5 Para todo subconjunto no vacio de un espacio vectorial lineal , el
conjunto de todas las combinaciones lineales de los elementos de se denota .
Definición 2.6 Si el espacio vectorial lineal generado de un número finito de vectores
linealmente independientes , entonces se dice que el conjunto es
una base para , además . Si no existe un número finito de vectores tal que
entonces se dice que es infinito-dimensional. Definición 2.7 Una Norma es una función no-negativa definida sobre un espacio vectorial lineal , , tal que: ∈
Definición 2.8 Un espacio lineal con norma, es un espacio vectorial lineal equipado
con una norma , y se denota .
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 35
Definición 2.9 Un producto interno en un espacio vectorial lineal definido sobre un
campo real , es un mapeo tal que para todo ∈ y ∈ , se tiene que: Definición 2.10 Un espacio con producto interno es un espacio vectorial lineal
equipado con un producto interno y se denota .
Definición 2.11 Dos elementos pertenecientes a un espacio con producto interno
se dicen ortogonales si:
(2.14)
El complemento ortogonal de un sub-espacio consiste en todos los vectores que
son ortogonales a los vectores en y se denota , es decir:
∈ ∈ (2.15)
En general pero si es finito dimensional entonces . Definición 2.12 Un elemento ∈ es un elemento vecindad de si existe ∈ tal que
El conjunto de todos los puntos vecindad de V se denota .
Definición 2.13 Un subconjunto V de un espacio lineal con norma es denso en si su
vecindad es igual a .
Definición 2.14 Un espacio vectorial lineal es separable si contiene un
subconjunto denso que es contable. Definición 2.15 Una secuencia
en un espacio lineal con norma es una secuencia de Cauchy si: cuando (2.16) Definición 2.16 Un espacio lineal con norma es completo si todas las secuencias de Cauchy encuentran su límite en . Definición 2.17 Un Espacio de Hilbert es un espacio lineal con producto interno que es completo.
Definición 2.18 Sea un conjunto finito o infinito de índices. El conjunto ∈ es un
conjunto ortonormal si:
36 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
para todo ∈ (2.17)
Definición 2.19 Sea ∈ un subconjunto contable de un espacio vectorial con norma
. El conjunto ∈ es máximo si:
∈
(2.18)
Definición 2.20 Un conjunto ortonormal ∈
es una base ortonormal de un espacio de
Hilbert separable si es un conjunto ortonormal máximo.
Teorema 2.2 Si es un espacio de Hilbert separable con base ortonormal ∈
,
cualquier elemento ∈ puede ser escrito así:
∈
El anterior teorema es la base para la reducción de modelos por medio de la descomposición ortogonal propia. En principio, establece que cada ∈ puede ser
expandido en términos de las bases ortogonales de si f es un elemento de un espacio de Hilbert separable. En la práctica se supone que las variables involucradas en fenómenos físicos pertenecen a un espacio de Hilbert separable, y se descarta pruebas matemáticas para cada caso en particular. Este teorema también es la base para la representación en series infinitas de Fourier de una función arbitraria, y por esta razón al término real se lo conoce como Coeficiente de Fourier de f en las bases ∈
.
Así, la Descomposición Ortogonal Propia aproxima una variable de un proceso mediante una expansión de en n funciones base:
Las funciones base contienen información acerca de las características espaciales
de la variable y los coeficientes de Fourier modelan los procesos temporales. La reducción de modelos usando POD se basa en truncar esa serie basándose en el grado de correlación de cada base con la variable de trabajo (Astrid [8]). Para esto se realiza un análisis espectral de los valores singulares de una matriz de datos que se obtiene de manera experimental o mediante simulación del fenómeno en cuestión, con el fin de establecer la relevancia de cada base ortogonal y su aporte en la construcción final de la señal.
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 37
2.5 La Proyección de Galerkin
El modelo de orden reducido es el modelo que describe las dinámicas de los coeficientes de Fourier
(Astrid [8]). Consideremos una Ecuación Diferencial Parcial con un operador que solo involucra derivadas espaciales y un operador polinomial que solo involucra derivadas respecto al tiempo, es decir que T es la solución de: (2.21) En donde está dado por:
Y el término que no involucra derivadas respecto al tiempo, entonces se define la función residual como: Supongamos que se han derivado unas bases POD
para las soluciones de la ecuación diferencial parcial. Si reemplazamos estas soluciones por una combinación lineal truncada de las primeras n funciones base POD:
Entonces el residual viene siendo:
Y dado que en general entonces .
En reducción de modelos, se desea aproximar las ecuaciones originales lo más
acertadamente posible, lo cual implica que la función residual de las
soluciones aproximadas debe ser minimizada, esto se logra aplicando la proyección de Galerkin.
Definición 2.21 Dada una base ortonormal de un espacio de Hilbert una
función residual del modelo . La Proyección de Galerkin establece
que la proyección de la función residual sobre el espacio generado de las n primeras funciones base se desvanece.
Esto significa que la función residual no está correlacionada con las funciones POD base, y que la mejor aproximación de la función residual proyectado sobre el espacio generado
38 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
por las bases POD se consigue cuando son mutuamente ortogonales, y esta ortogonalidad implica que la proyección del residual es mínimo.
2.6 Modelamiento, simulación y aproximación de fenómenos de transferencia de calor en materiales compuestos
Los métodos de discretización (Diferencias, Volúmenes y Elementos Finitos) de sistemas de ecuaciones diferenciales parciales permiten aproximar numéricamente sistemas infinito-dimensionales, y pueden ser vistos como una proyección de Galerkin de un espacio infinito a uno finito. Particularmente, en el método de Elementos Finitos (Chessa [11]), el dominio espacial se divide en elementos discretos no estructurados; en 2D se usan elementos triangulares y cuadriláteros. La característica principal es que las ecuaciones en el método de Elementos Finitos están multiplicadas por funciones de ponderación antes de ser integradas sobre el dominio espacial. En su método más simple, la solución es aproximada por una función lineal en cada elemento de forma que se garantice la continuidad de la solución a través de las fronteras de los elementos. Las ecuaciones que deben ser resueltas se obtienen imponiendo la selección de una solución óptima de entre un conjunto de funciones permitidas. La ventaja de discretizar el dominio espacial por medio de elementos finitos es la facilidad para manejar geometrías complejas.
Esta tesis se enfocó al estudio de fenómenos de transferencia de calor llevados a cabo
en un reactor de polimerización industrial. El calor se puede transferir de tres formas: conducción, convección y radiación (Bird [10]). La conducción se refiere al mecanismo de transferencia ligado a las interacciones (vibraciones) moleculares entre las moléculas de un material y está definida por la Ley de Fourier; la convección se refiere al mecanismo de transferencia ligado al movimiento de un fluido alrededor de una superficie, se define por medio de la Ley de Newton del enfriamiento; y la radiación se refiere al mecanismo de transferencia por medio de ondas electromagnéticas y está definida por la Ley de Stefan-Boltzmann. Los fenómenos de transferencia de calor que se tuvieron en cuenta para modelar las dinámicas de temperatura del reactor fueron la conducción y la convección.
2.7 Descripción del proceso y simulación del modelo
Se simuló un modelo que describe los fenómenos de transferencia de calor llevados a cabo en la prensa de dientes artificiales (reactor). Un diagrama del proceso se muestra a continuación:
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 39
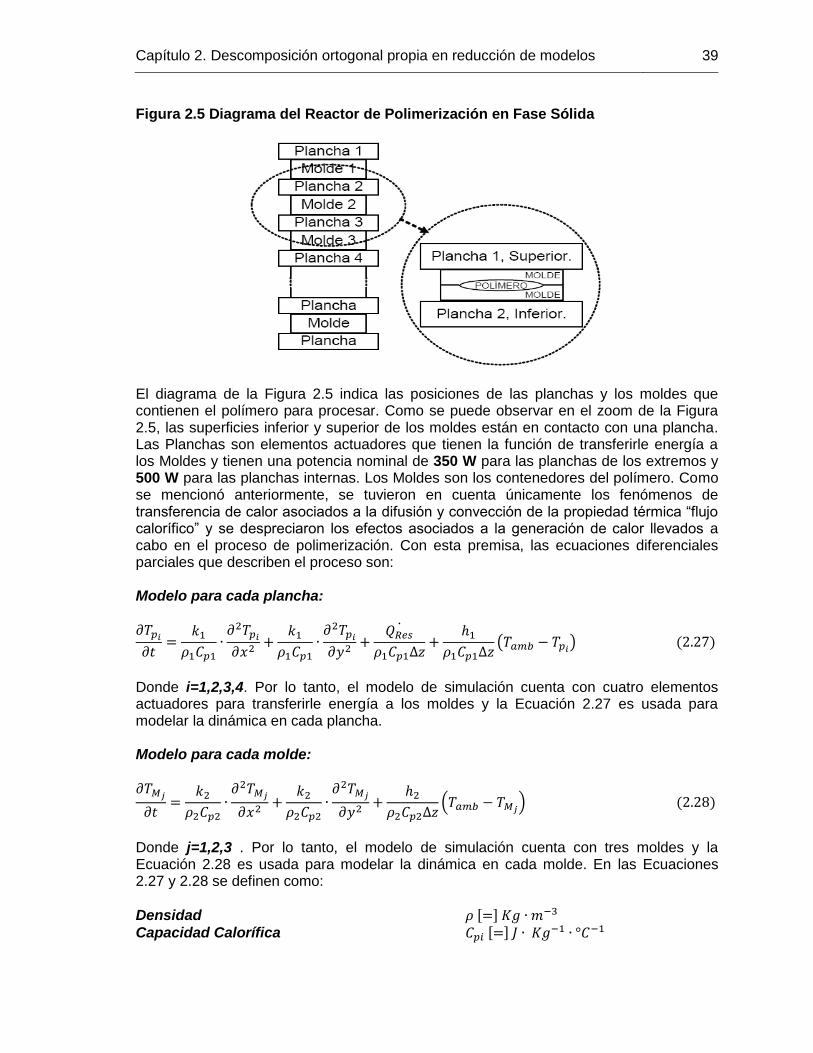
Figura 2.5 Diagrama del Reactor de Polimerización en Fase Sólida
El diagrama de la Figura 2.5 indica las posiciones de las planchas y los moldes que contienen el polímero para procesar. Como se puede observar en el zoom de la Figura 2.5, las superficies inferior y superior de los moldes están en contacto con una plancha. Las Planchas son elementos actuadores que tienen la función de transferirle energía a los Moldes y tienen una potencia nominal de 350 W para las planchas de los extremos y 500 W para las planchas internas. Los Moldes son los contenedores del polímero. Como se mencionó anteriormente, se tuvieron en cuenta únicamente los fenómenos de transferencia de calor asociados a la difusión y convección de la propiedad térmica “flujo calorífico” y se despreciaron los efectos asociados a la generación de calor llevados a cabo en el proceso de polimerización. Con esta premisa, las ecuaciones diferenciales parciales que describen el proceso son:
Modelo para cada plancha:
Donde i=1,2,3,4. Por lo tanto, el modelo de simulación cuenta con cuatro elementos actuadores para transferirle energía a los moldes y la Ecuación 2.27 es usada para modelar la dinámica en cada plancha. Modelo para cada molde:
Donde j=1,2,3 . Por lo tanto, el modelo de simulación cuenta con tres moldes y la
Ecuación 2.28 es usada para modelar la dinámica en cada molde. En las Ecuaciones 2.27 y 2.28 se definen como:
Densidad
Capacidad Calorífica
40 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
Conductividad Térmica
Coeficiente Convectivo
Flujo de Calor En el modelo de simulación se usaron los siguientes valores de parámetros ya validados
para la planta piloto:
Tabla 2.1 Parámetros Físicos de la Planta Piloto
PARAMETRO UNIDAD PLANCHAS MOLDES
Densidad =7801 =7801
Capacidad Calorífica =500 =520
Conductividad Térmica =85 250
Coeficiente Convectivo =15 =11.25
Siguiendo el diseño de la planta piloto, se ubicaron en las Placas cuatro puntos de medición, uno por cada placa (elemento actuador).
Se tienen condiciones de frontera de Neuman
en los extremos superior e inferior
en donde se tiene aislamiento térmico en dichas fronteras. En las demás fronteras se presentan efectos convectivos y condiciones de frontera tipo Neuman .
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 41
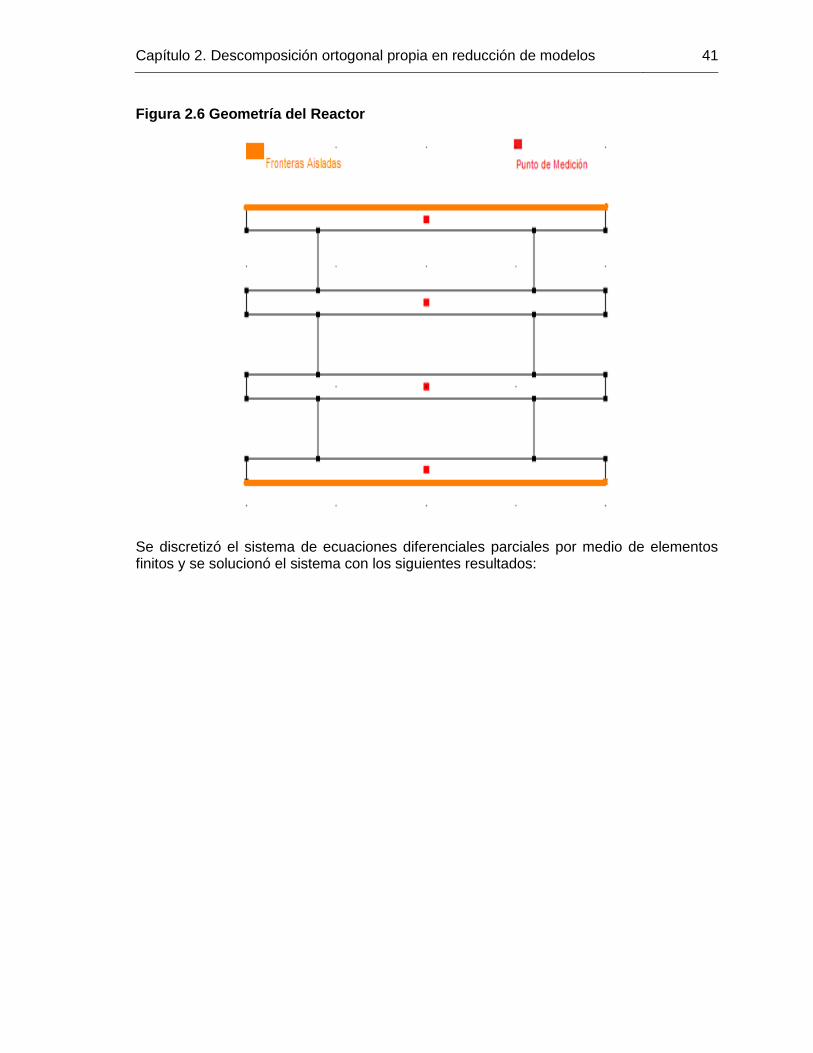
Figura 2.6 Geometría del Reactor
Se discretizó el sistema de ecuaciones diferenciales parciales por medio de elementos finitos y se solucionó el sistema con los siguientes resultados:
42 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
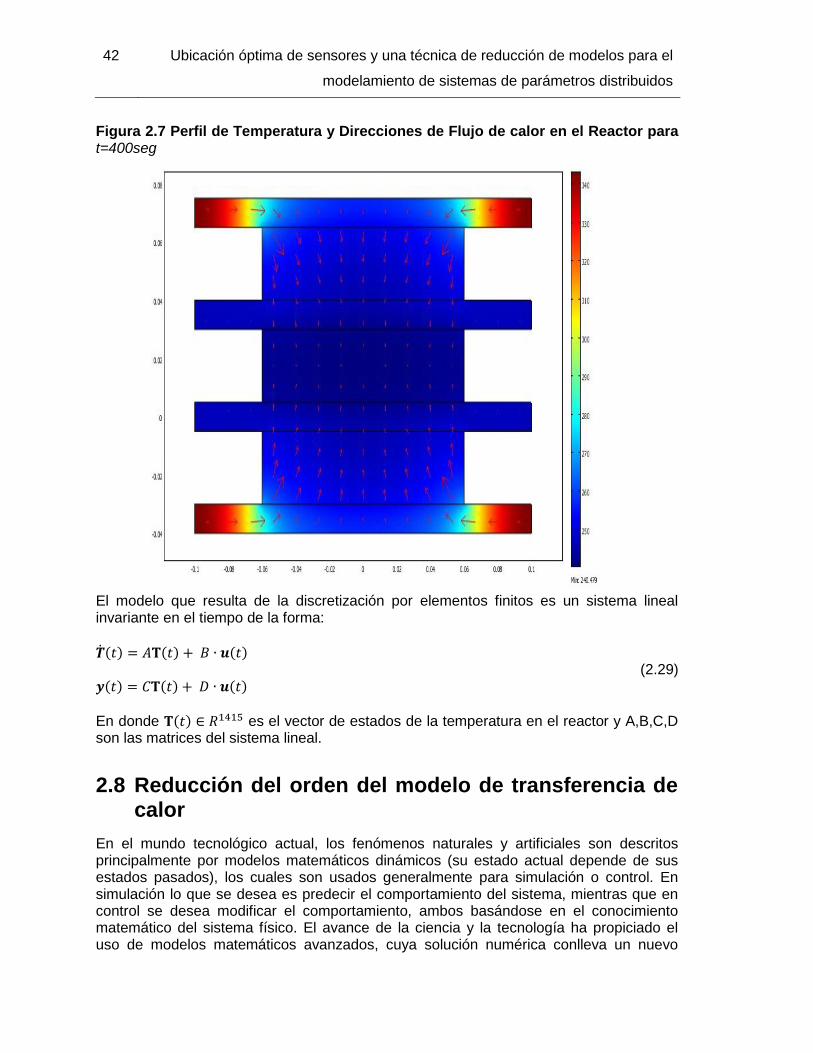
Figura 2.7 Perfil de Temperatura y Direcciones de Flujo de calor en el Reactor para t=400seg
El modelo que resulta de la discretización por elementos finitos es un sistema lineal invariante en el tiempo de la forma:
(2.29)
En donde ∈ es el vector de estados de la temperatura en el reactor y A,B,C,D son las matrices del sistema lineal.
2.8 Reducción del orden del modelo de transferencia de calor
En el mundo tecnológico actual, los fenómenos naturales y artificiales son descritos principalmente por modelos matemáticos dinámicos (su estado actual depende de sus estados pasados), los cuales son usados generalmente para simulación o control. En simulación lo que se desea es predecir el comportamiento del sistema, mientras que en control se desea modificar el comportamiento, ambos basándose en el conocimiento matemático del sistema físico. El avance de la ciencia y la tecnología ha propiciado el uso de modelos matemáticos avanzados, cuya solución numérica conlleva un nuevo
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 43
desafío tecnológico para la capacidad y velocidad de cómputo, sistemas de almacenamiento (memoria física) y visualización de los datos actuales. Las técnicas de reducción de modelos han sido ampliamente usadas en la literatura con el fin de aproximar datos representados por estructuras de gran dimensión por medio de estructuras de menor dimensión. Particularmente en el área de los sistemas dinámicos, han sido utilizadas para aproximar sistemas de ecuaciones diferenciales de alto orden
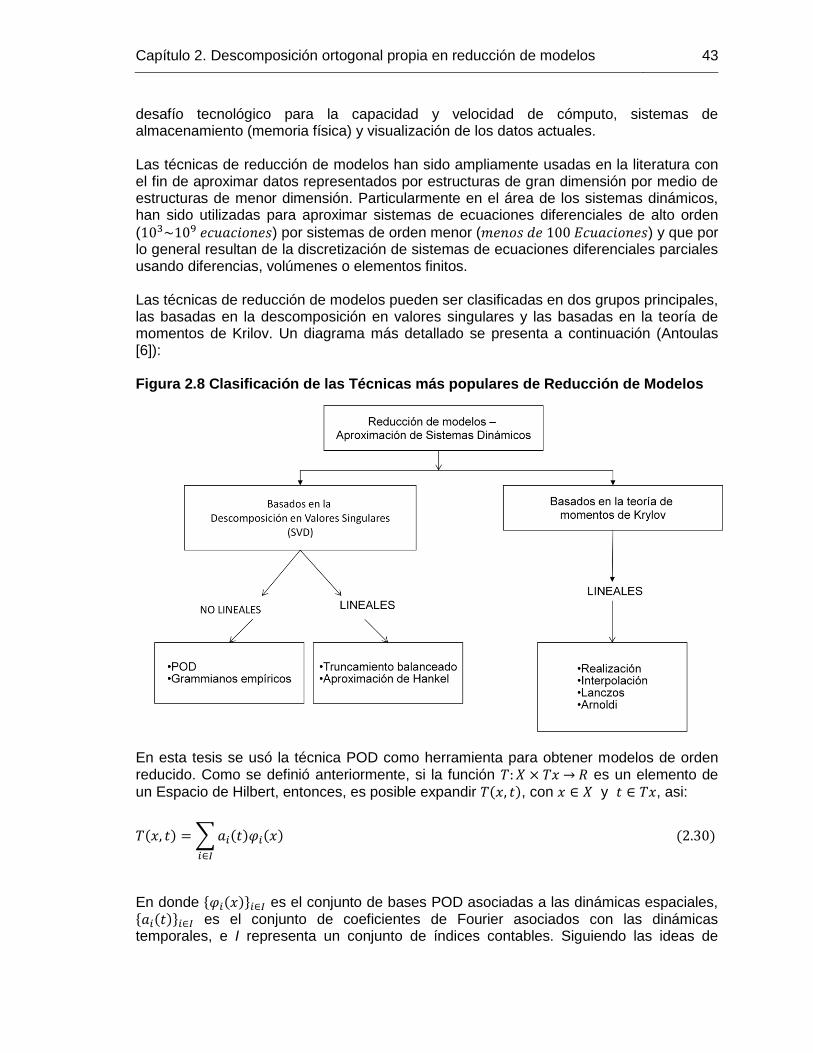
( ) por sistemas de orden menor ( ) y que por lo general resultan de la discretización de sistemas de ecuaciones diferenciales parciales usando diferencias, volúmenes o elementos finitos. Las técnicas de reducción de modelos pueden ser clasificadas en dos grupos principales, las basadas en la descomposición en valores singulares y las basadas en la teoría de momentos de Krilov. Un diagrama más detallado se presenta a continuación (Antoulas [6]): Figura 2.8 Clasificación de las Técnicas más populares de Reducción de Modelos
En esta tesis se usó la técnica POD como herramienta para obtener modelos de orden reducido. Como se definió anteriormente, si la función
es un elemento de
un Espacio de Hilbert, entonces, es posible expandir , con ∈ y ∈ , asi:
∈
En donde ∈ es el conjunto de bases POD asociadas a las dinámicas espaciales, ∈ es el conjunto de coeficientes de Fourier asociados con las dinámicas temporales, e I representa un conjunto de índices contables. Siguiendo las ideas de
44 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
reducción de modelos, es posible truncar la sumatoria infinita hasta la n-ésima base ortogonal así:
Ahora, es necesario conocer las dinámicas de los Coeficientes de Fourier y se
procede a reemplazar por su aproximación en las ecuaciones originales, luego se aplica la Proyección de Galerkin del modelo continuo sobre el espacio generado por las bases ortogonales seleccionadas.
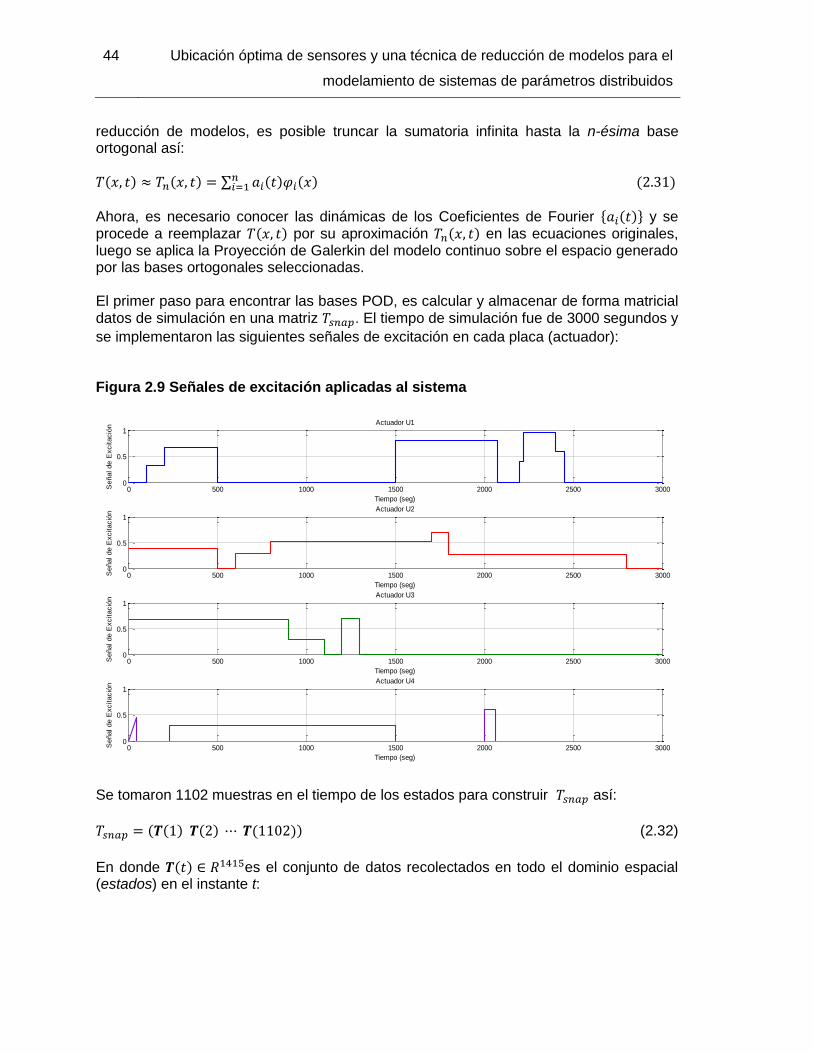
El primer paso para encontrar las bases POD, es calcular y almacenar de forma matricial
datos de simulación en una matriz . El tiempo de simulación fue de 3000 segundos y
se implementaron las siguientes señales de excitación en cada placa (actuador):
Figura 2.9 Señales de excitación aplicadas al sistema
Se tomaron 1102 muestras en el tiempo de los estados para construir así:
(2.32)
En donde ∈ es el conjunto de datos recolectados en todo el dominio espacial (estados) en el instante t:
0 500 1000 1500 2000 2500 30000
0.5
1
Tiempo (seg)
Señal de E
xcitació
n
Actuador U1
0 500 1000 1500 2000 2500 30000
0.5
1
Tiempo (seg)
Señal de E
xcitació
n
Actuador U2
0 500 1000 1500 2000 2500 30000
0.5
1
Señal de E
xcitació
n
Tiempo (seg)
Actuador U3
0 500 1000 1500 2000 2500 30000
0.5
1
Tiempo (seg)
Señal de E
xcitació
n
Actuador U4
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 45
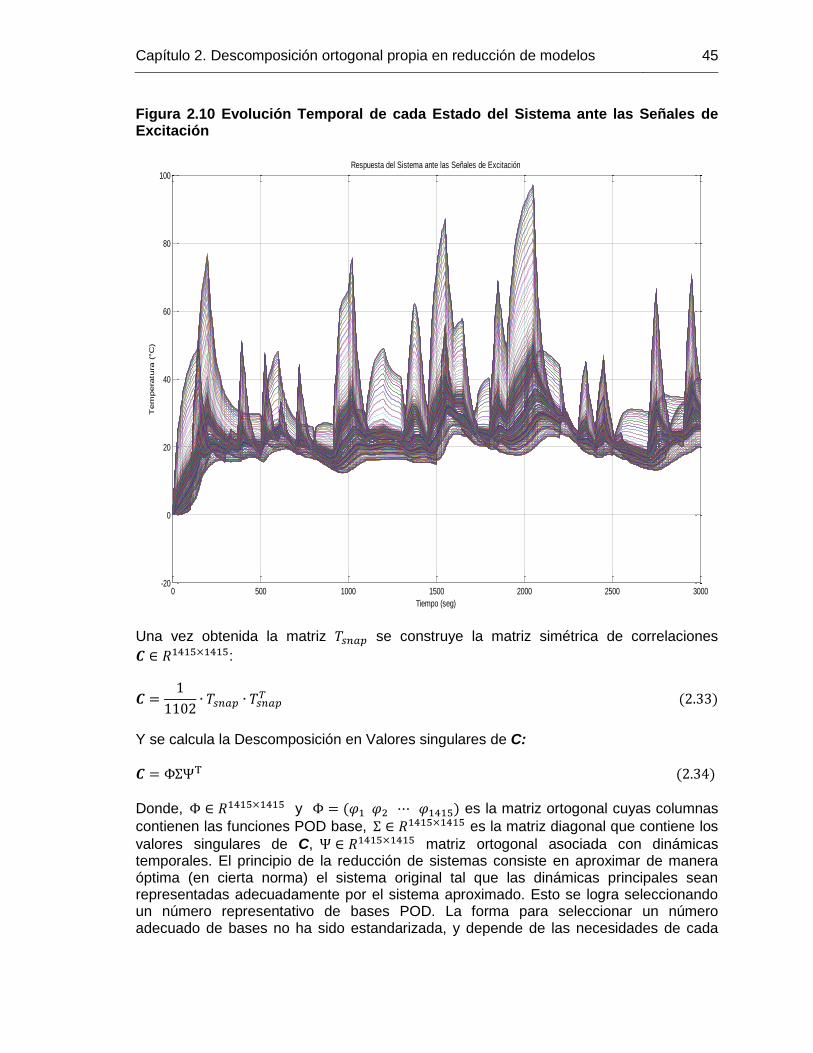
Figura 2.10 Evolución Temporal de cada Estado del Sistema ante las Señales de Excitación
Una vez obtenida la matriz se construye la matriz simétrica de correlaciones
∈ :
Y se calcula la Descomposición en Valores singulares de C:
Donde, ∈ y es la matriz ortogonal cuyas columnas
contienen las funciones POD base, ∈ es la matriz diagonal que contiene los
valores singulares de C, ∈ matriz ortogonal asociada con dinámicas temporales. El principio de la reducción de sistemas consiste en aproximar de manera óptima (en cierta norma) el sistema original tal que las dinámicas principales sean representadas adecuadamente por el sistema aproximado. Esto se logra seleccionando un número representativo de bases POD. La forma para seleccionar un número adecuado de bases no ha sido estandarizada, y depende de las necesidades de cada
0 500 1000 1500 2000 2500 3000-20
0
20
40
60
80
100
Tiempo (seg)
Tem
pera
tura
(°C
)
Respuesta del Sistema ante las Señales de Excitación
46 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
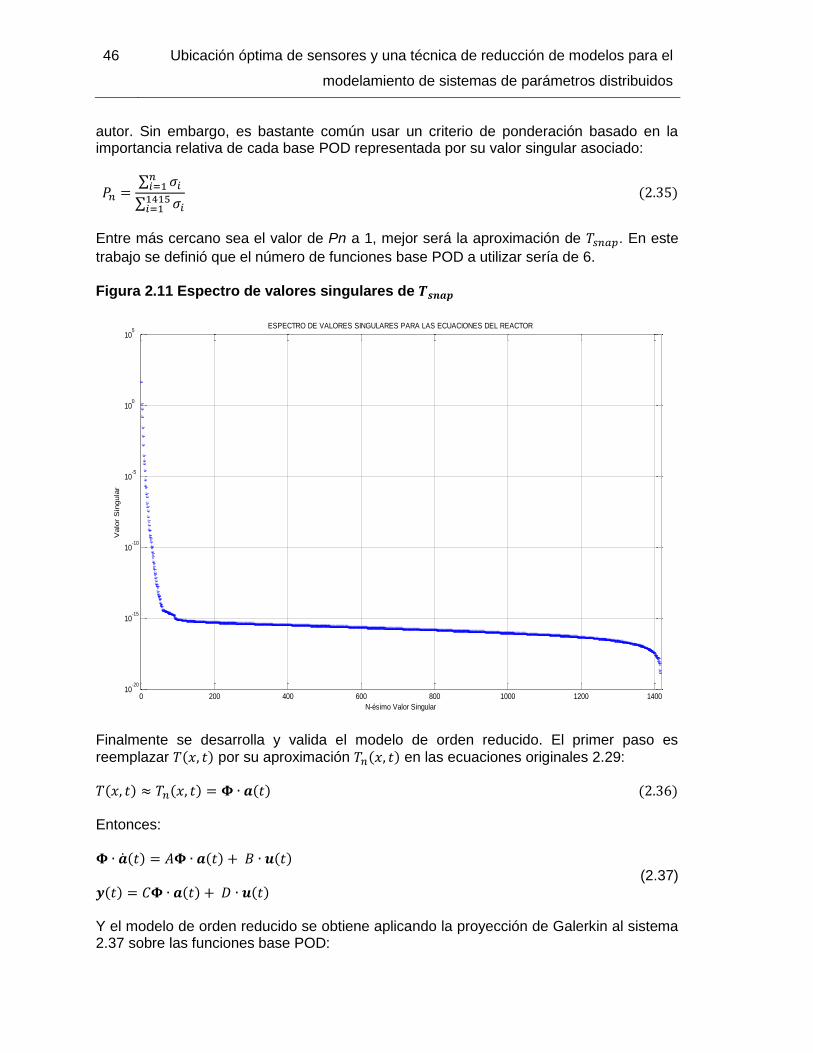
autor. Sin embargo, es bastante común usar un criterio de ponderación basado en la importancia relativa de cada base POD representada por su valor singular asociado:
Entre más cercano sea el valor de Pn a 1, mejor será la aproximación de . En este
trabajo se definió que el número de funciones base POD a utilizar sería de 6.
Figura 2.11 Espectro de valores singulares de
Finalmente se desarrolla y valida el modelo de orden reducido. El primer paso es
reemplazar por su aproximación en las ecuaciones originales 2.29:
Entonces:
(2.37)
Y el modelo de orden reducido se obtiene aplicando la proyección de Galerkin al sistema 2.37 sobre las funciones base POD:
0 200 400 600 800 1000 1200 140010
-20
10-15
10-10
10-5
100
105
N-ésimo Valor Singular
Valo
r S
ingula
r
ESPECTRO DE VALORES SINGULARES PARA LAS ECUACIONES DEL REACTOR
Related Documents











