1 Yale Autonomous Vehicle Project: Implementing an Embedded System with an EBX Form Factor PC System and PIC Microcontrollers

1 Yale Autonomous Vehicle Project: Implementing an Embedded System with an EBX Form Factor PC System and PIC Microcontrollers.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript
1
Yale Autonomous Vehicle Project:
Implementing an Embedded System with an
EBX Form Factor PC System and PIC Microcontrollers

2
Team Members:
Mike Liu Ethan Bregman Alan Ghelberg
Andy Nelson Andy Graham Jimmy Su
3
Presentation Outline
•Basic Overview of Robot
•Example Programs
•Benefits of the EBX-Form Factor
4
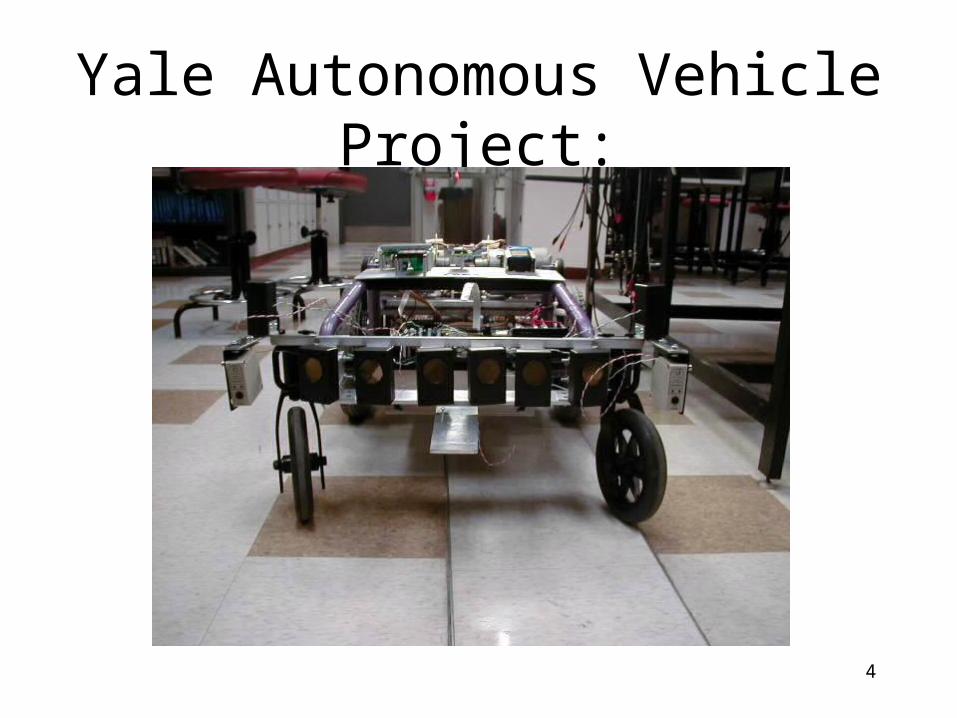
Yale Autonomous Vehicle Project:

5
Yale Autonomous Vehicle Project:

6
Yale Autonomous Vehicle Project:
7
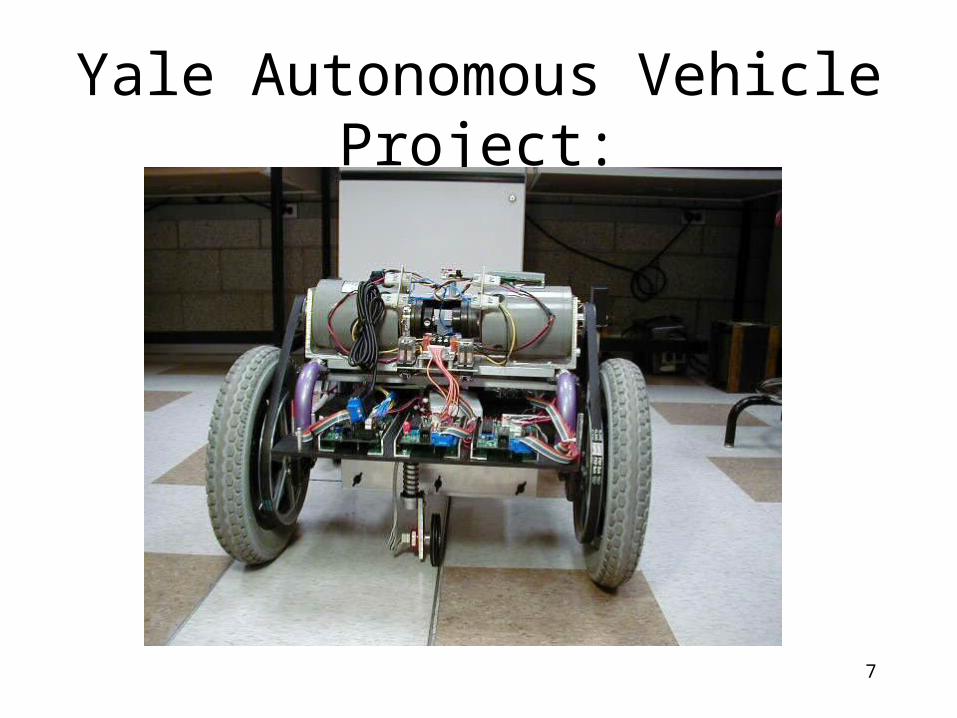
Yale Autonomous Vehicle Project:
8
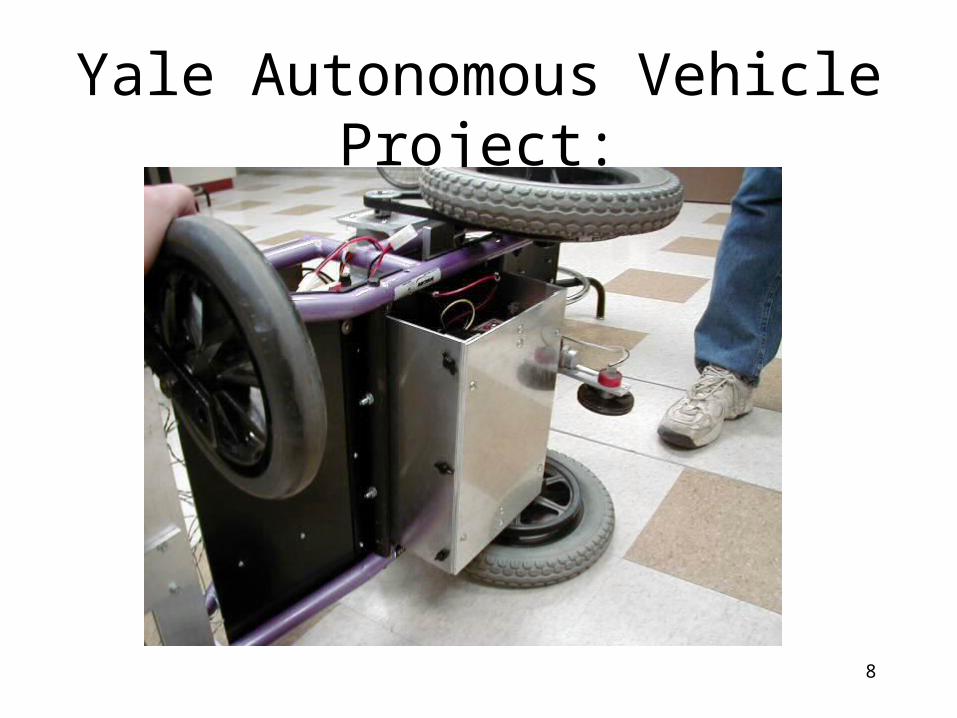
Yale Autonomous Vehicle Project:
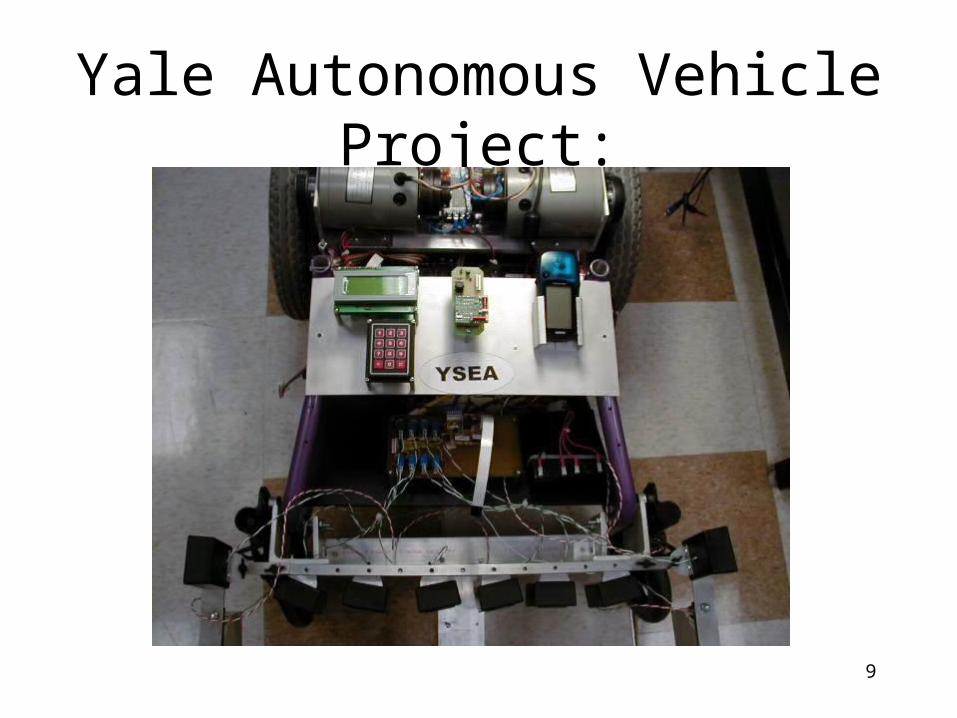
9
Yale Autonomous Vehicle Project:
10
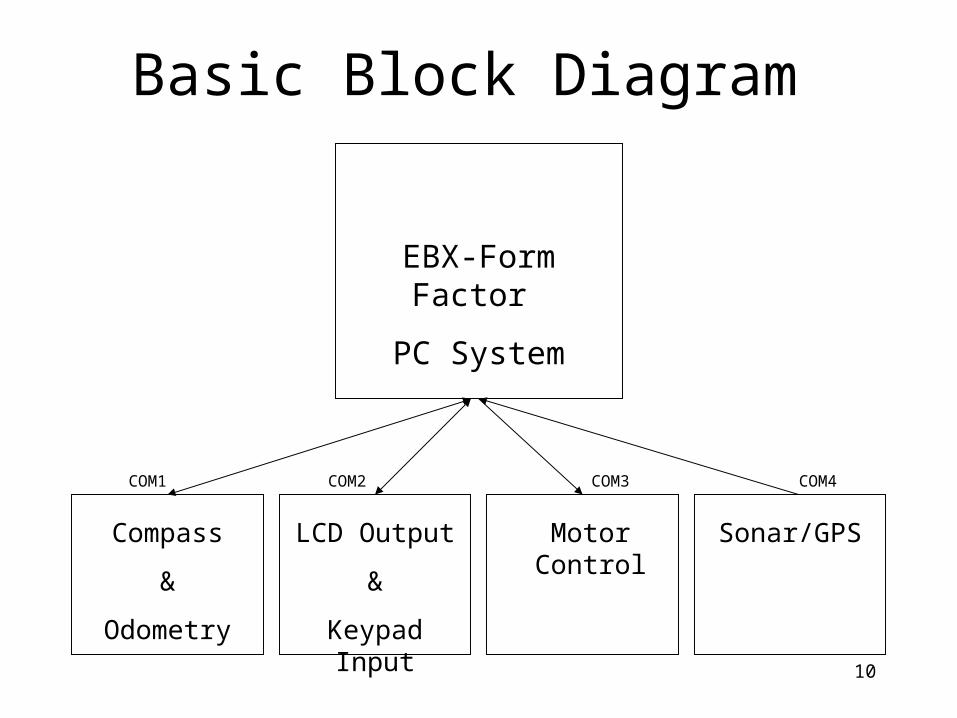
Basic Block Diagram
EBX-Form Factor
PC System
Compass
&
Odometry
LCD Output
&
Keypad Input
Motor Control Sonar/GPS
COM1 COM2 COM3 COM4
11
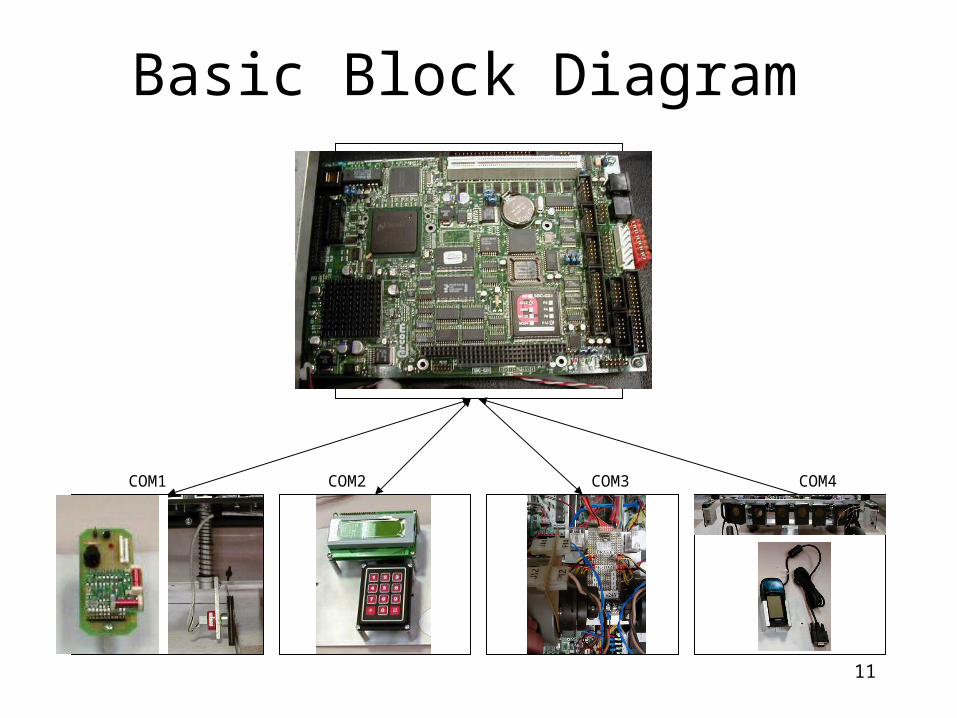
Basic Block Diagram
EBX-Form Factor
PC System
COM1 COM2 COM3 COM4
12
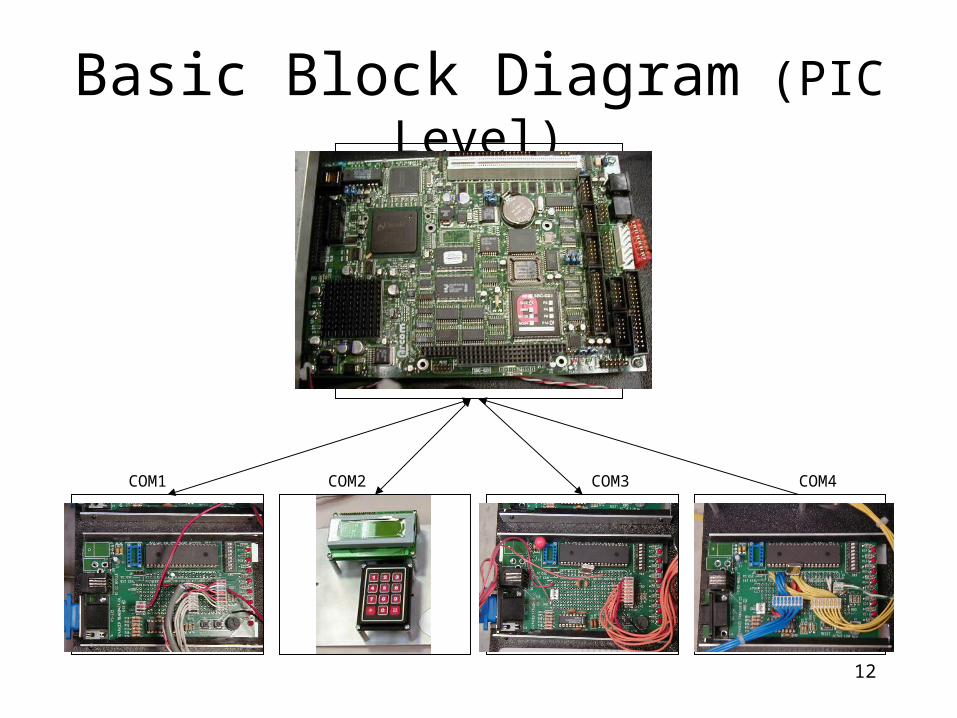
Basic Block Diagram (PIC Level)
EBX-Form Factor
PC System
COM1 COM2 COM3 COM4
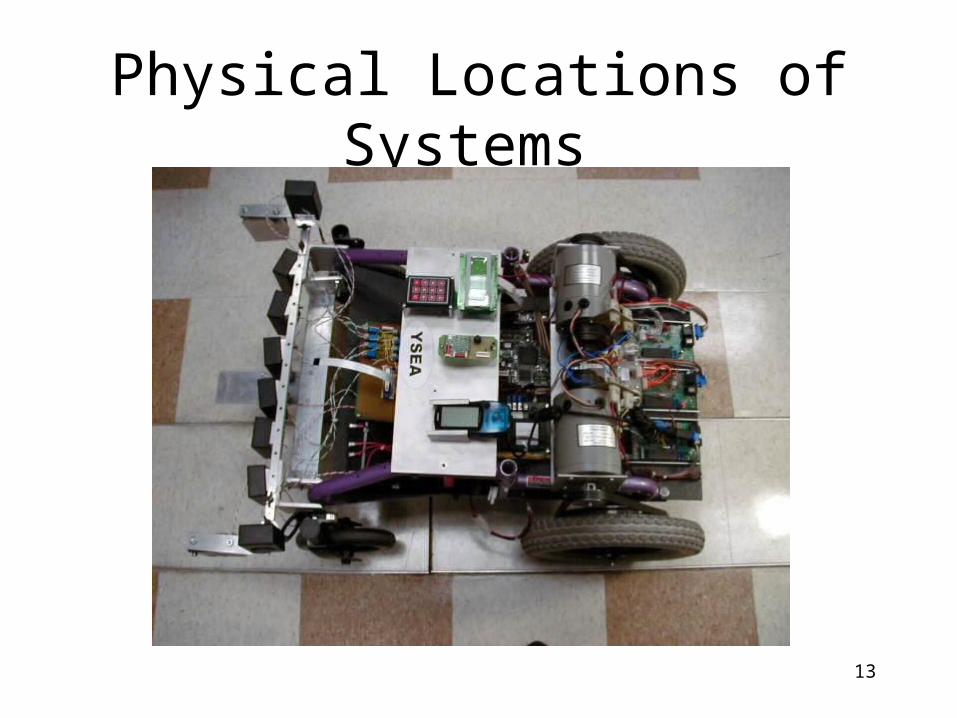
13
Physical Locations of Systems
14
Example Programs
•Turn.c
•Forward2.c
•Full5.c
15
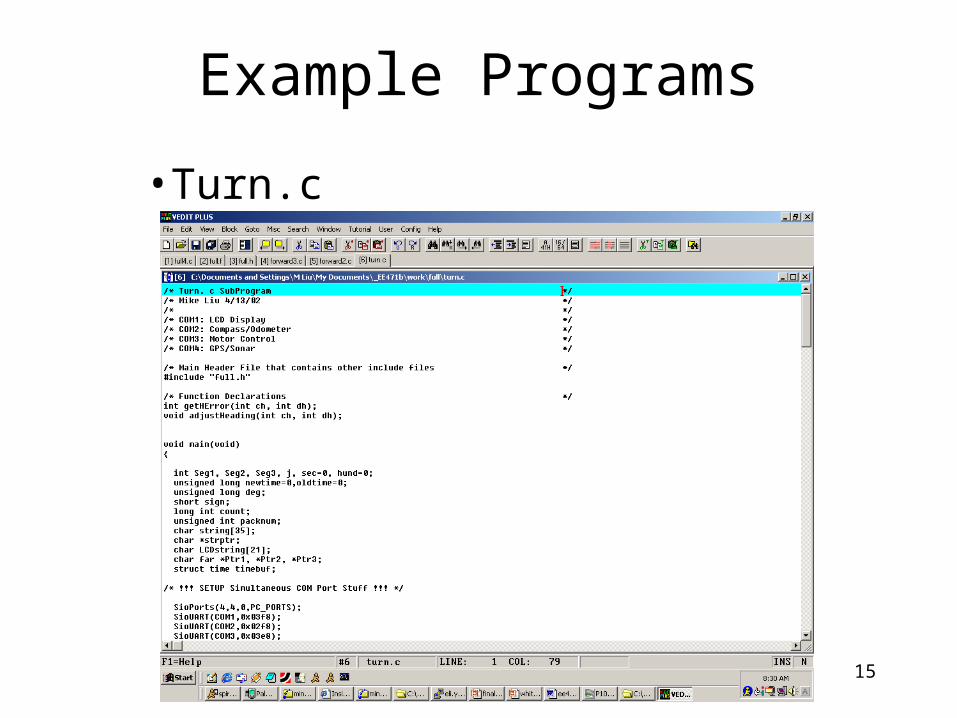
Example Programs
•Turn.c
16
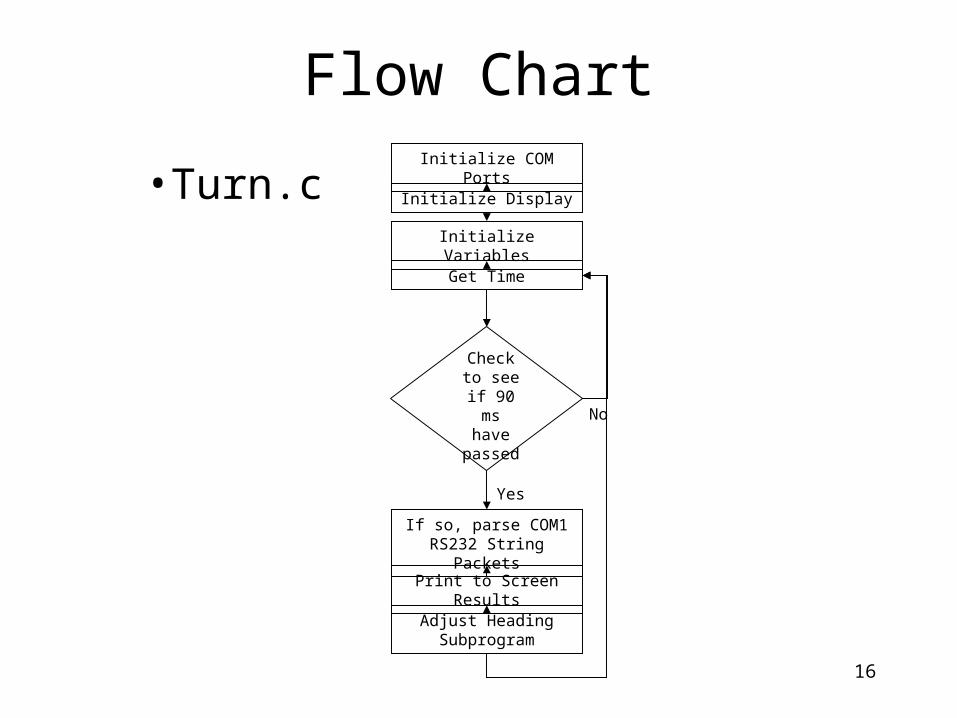
Flow Chart
•Turn.cInitialize COM Ports
Initialize Display
Initialize Variables
Get Time
Check to see if 90 ms have passed
If so, parse COM1 RS232 String Packets
Yes
No
Print to Screen Results
Adjust Heading Subprogram
17
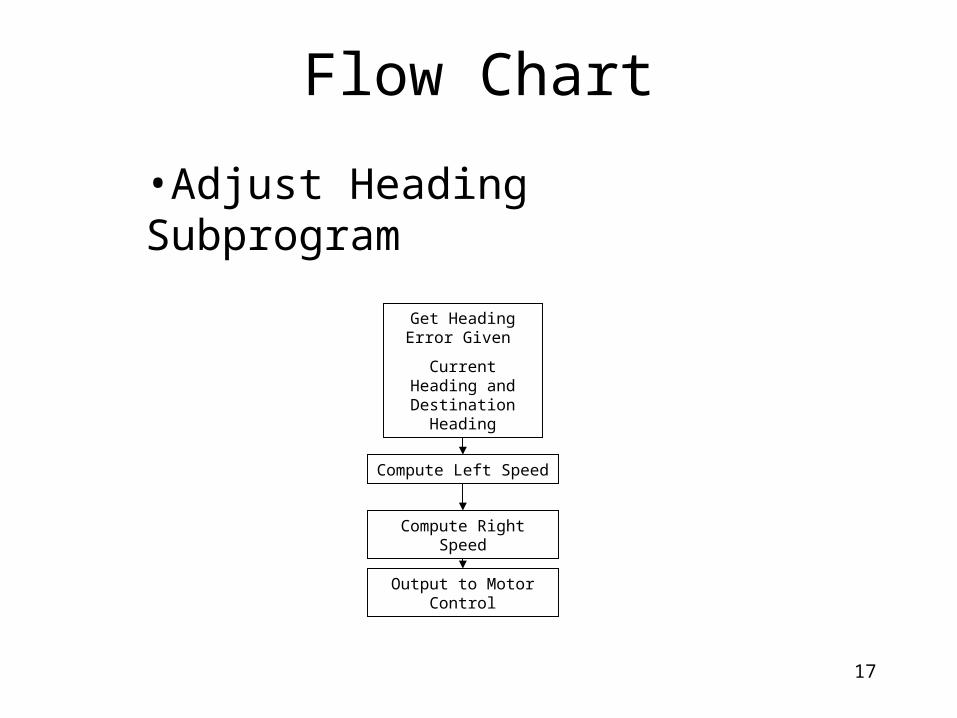
Flow Chart
•Adjust Heading Subprogram
Get Heading Error Given
Current Heading and Destination
Heading
Compute Left Speed
Compute Right Speed
Output to Motor Control
18
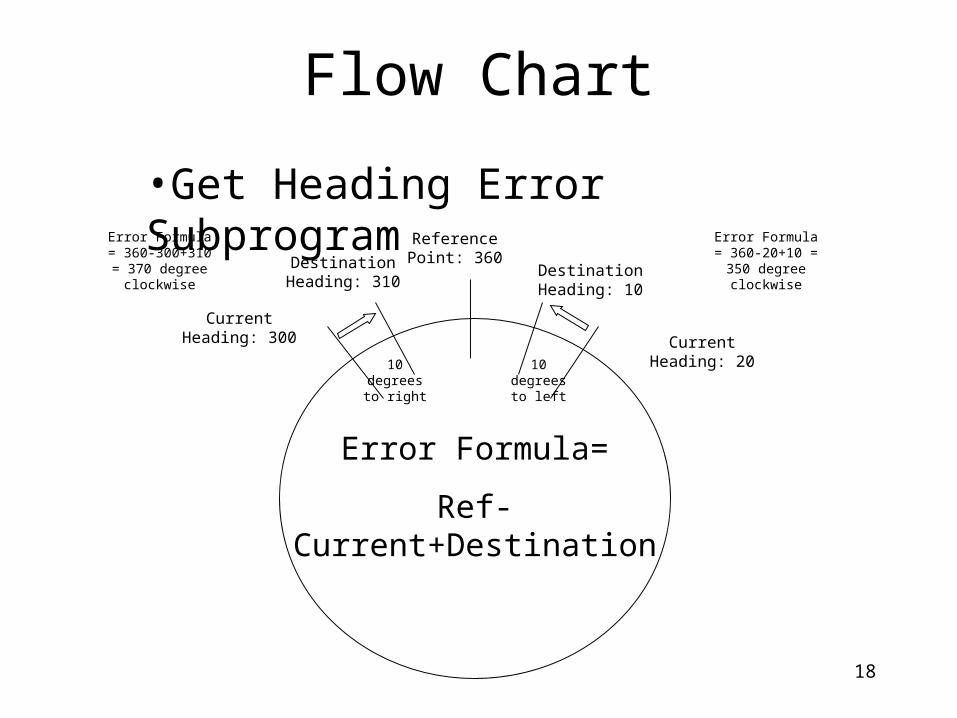
Flow Chart
•Get Heading Error Subprogram
Current Heading: 20
Current Heading: 300
Destination Heading: 10
Reference Point: 360Destination
Heading: 310
Error Formula=
Ref-Current+Destination
10 degrees to right
10 degrees to left
Error Formula = 360-20+10 = 350 degree clockwise
Error Formula = 360-300+310 =
370 degree clockwise
19
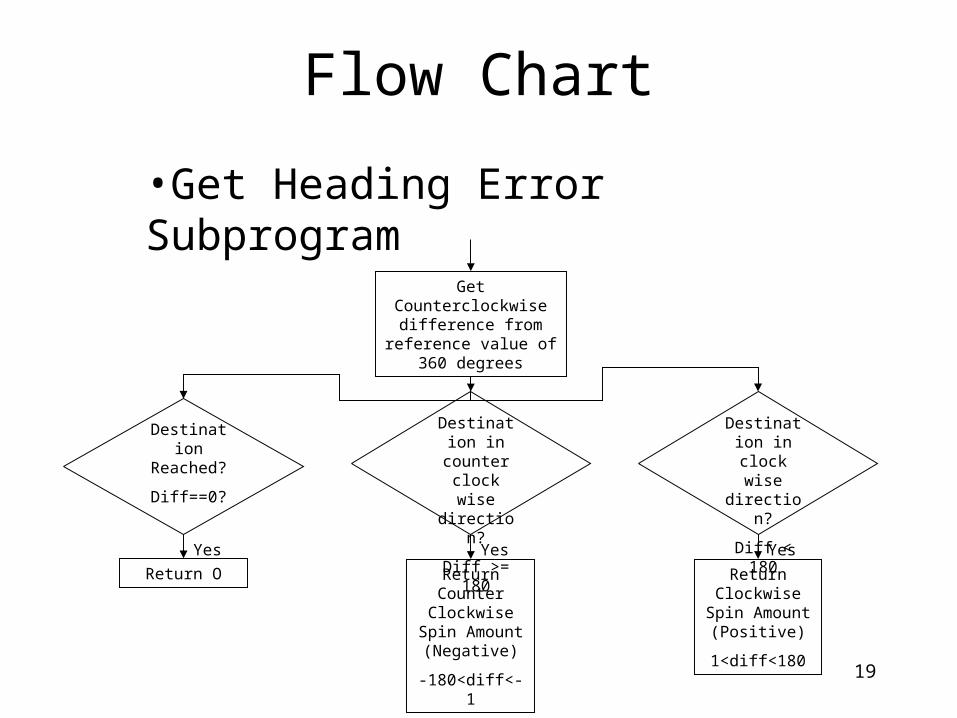
Flow Chart
•Get Heading Error Subprogram
Destination in counter clock wise direction?
Diff >= 180
Return Counter
Clockwise Spin Amount
(Negative)
-180<diff<-1
Yes
Destination Reached?
Diff==0?
Return O
Destination in clock
wise direction?
Diff < 180
Return Clockwise Spin
Amount (Positive)
1<diff<180
Yes Yes
Get Counterclockwise difference from
reference value of 360 degrees
20
Example Programs
•Forward2.c
21
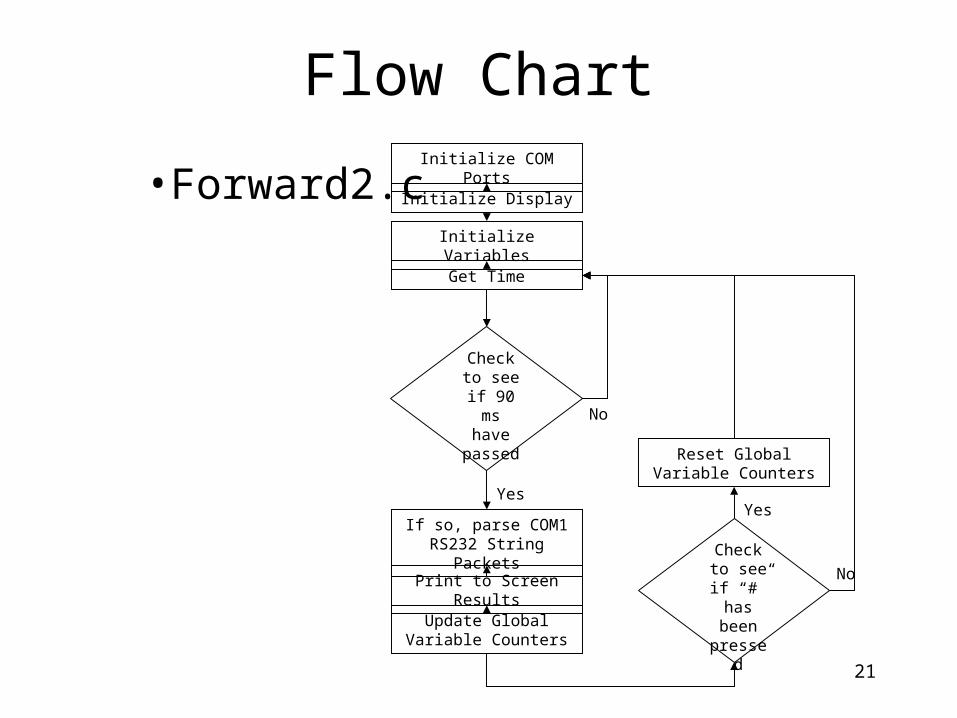
Flow Chart
•Forward2.cInitialize COM Ports
Initialize Display
Initialize Variables
Get Time
Check to see if 90 ms have passed
If so, parse COM1 RS232 String Packets
Yes
No
Print to Screen Results
Update Global Variable Counters
Check to see if “#”
has been
pressed
Reset Global Variable Counters
Yes
No
22
Example Programs
•Full5.c
23
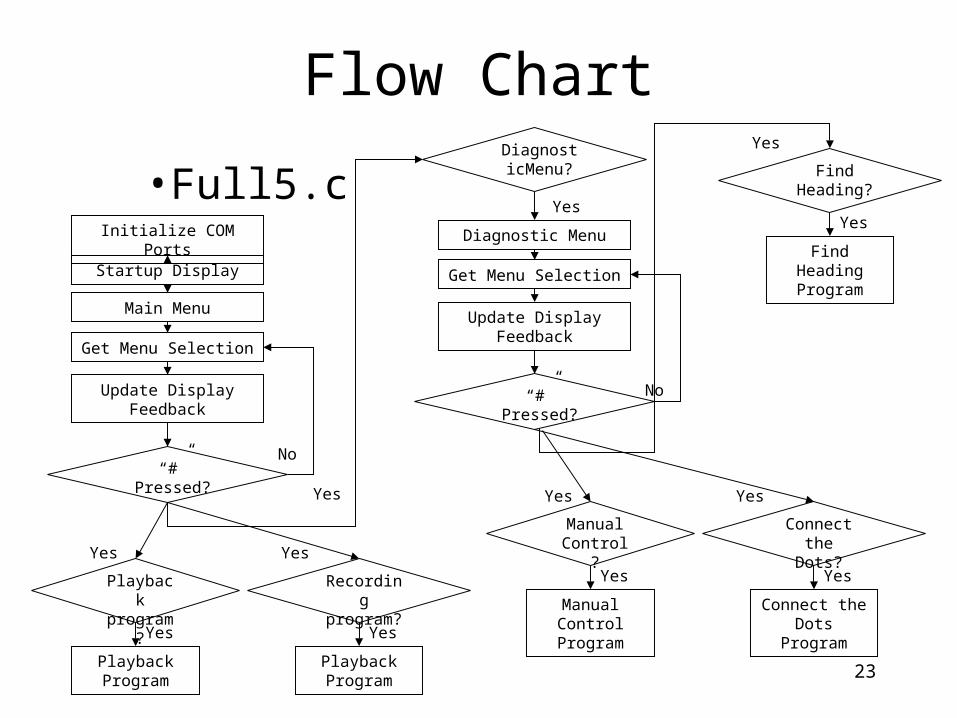
Flow Chart
•Full5.cInitialize COM Ports
Startup Display
Main Menu
Get Menu Selection
“#” Pressed?
No
Update Display Feedback
Playback program?
Recording program?
DiagnosticMenu?
Yes
Yes
Yes
Playback Program
Playback Program
Yes Yes
Yes
Diagnostic Menu
Get Menu Selection
“#” Pressed?
Update Display Feedback
No
Manual Control?
Connect the Dots?
Yes Yes
Manual Control Program
Connect the Dots Program
Yes Yes
Find Heading?
Yes
Find Heading Program
Yes
24
Benefits of the EBX-Form Factor
•Low-Power
•Small Size
•PC-Compatible
•PC/104 Compatible
•4 COM Ports Built-In
•Solid-State Flash Disk
25
Benefits of the EBX-Form Factor
•Low-Power
26
Benefits of the EBX-Form Factor
•Small Size
27
Benefits of the EBX-Form Factor
•PC-Compatible
28
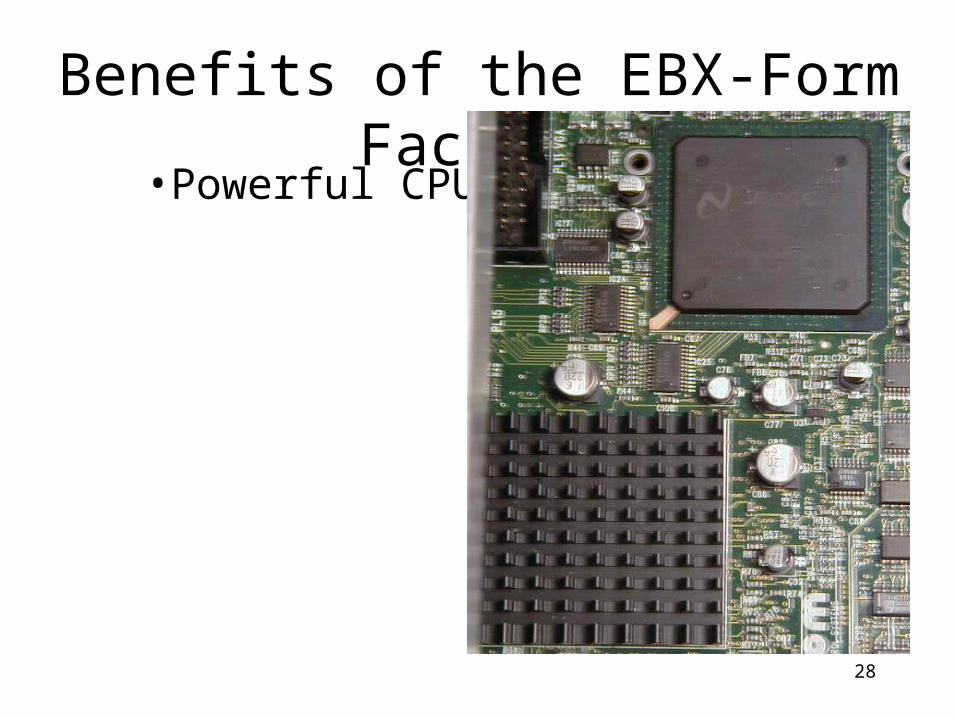
Benefits of the EBX-Form Factor
•Powerful CPU
29
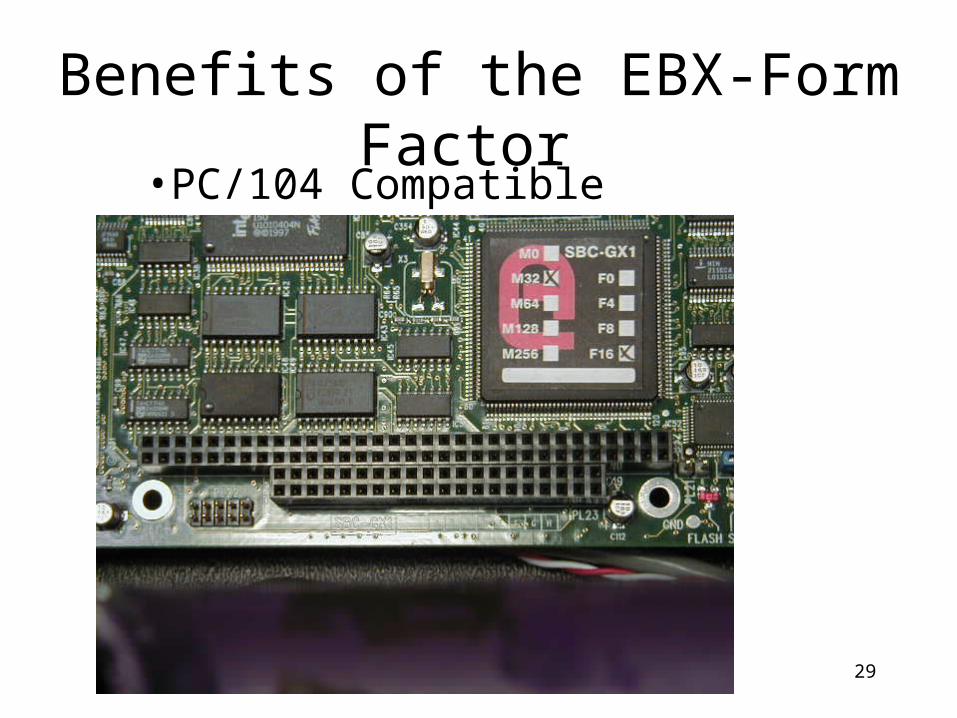
Benefits of the EBX-Form Factor
•PC/104 Compatible
30
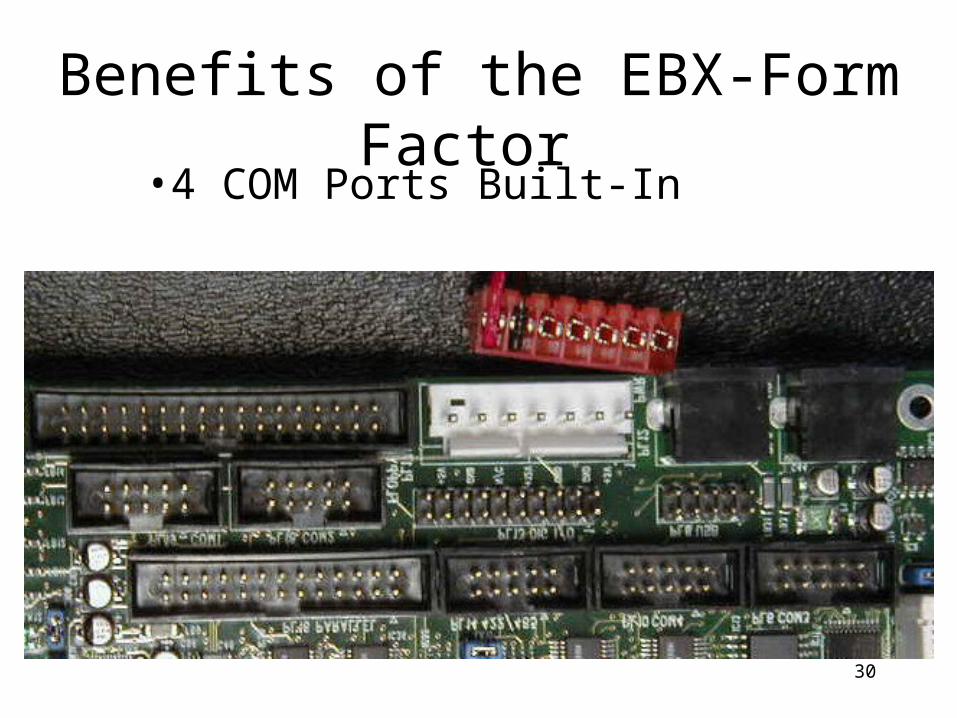
Benefits of the EBX-Form Factor
•4 COM Ports Built-In
31
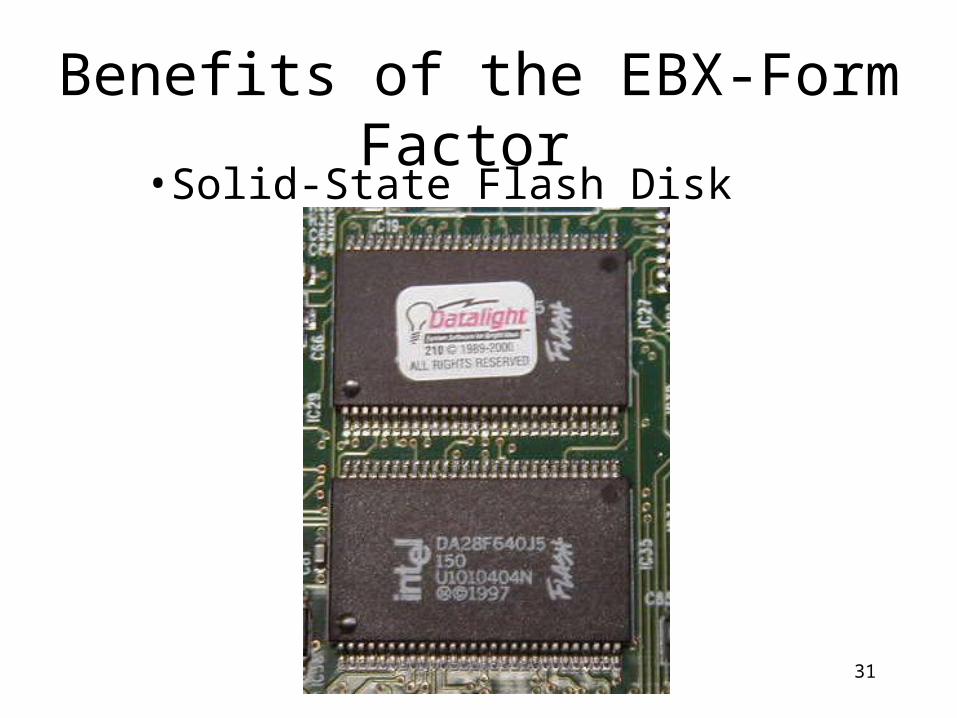
Benefits of the EBX-Form Factor
•Solid-State Flash Disk
32
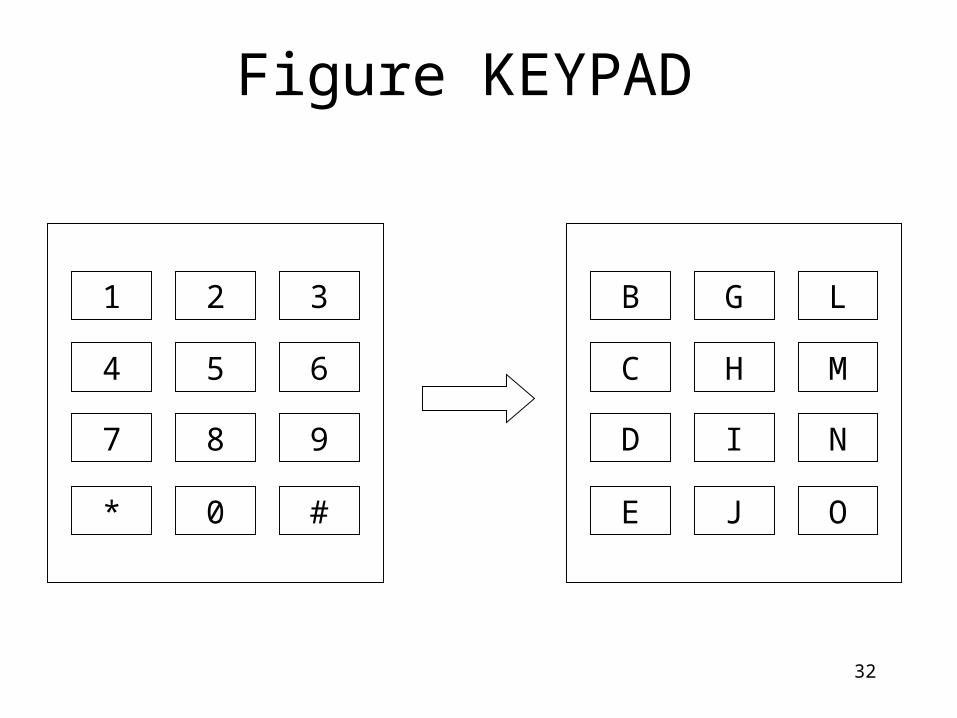
Figure KEYPAD
1 2 3
4 5 6
7 8 9
* 0 #
B G L
C H M
D I N
E J O
Related Documents










![Synquid: Synthesizing Programs from Liquid Typesnpolikarpova/talks/strangeloop18.pdf · next_element: cmp dword [ebx + next], 0 je found_last mov ebx, [ebx + next] jmp next_element](https://static.cupdf.com/doc/110x72/6008fbe7af0f6456bc412765/synquid-synthesizing-programs-from-liquid-types-npolikarpovatalksstrangeloop18pdf.jpg)
