1 Timed CTL Model Checking Region Automata UPPAAL T-shirt to (identifiable) download no 40

1 Timed CTL Model Checking Region Automata Kim Guldstrand Larsen Paul Pettersson BRICS@Aalborg UPPAAL T-shirt to (identifiable) download no 40.
Dec 14, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Timed CTLModel CheckingRegion Automata
Kim Guldstrand LarsenPaul Pettersson
BRICS@Aalborg
UPPAAL T-shirt to (identifiable)
download no 40

IDA foredrag 20.4.99 2
Timed CTL

3Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Light Switch
Switch may be turned on whenever at least 2 time units has elapsed since last “turn off”
Light automatically switches off after 9 time units.
push
pushclick
9y

4Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Semantics
clock valuations:state:Semantics of timed automata is a labeled
transition systemwhere
action transition
delay Transition
)(),( CVvandLlwherevl
})(|),({ LlandCVvvlS
0:)( RCvCV
),( S
0')')((
),(),(
RddwheneverdvlInv
iffdvlvl d
g a rl l’
)')('(][')(
)','(),(
vlInvandrvvandvg
iffvlvl a
5Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
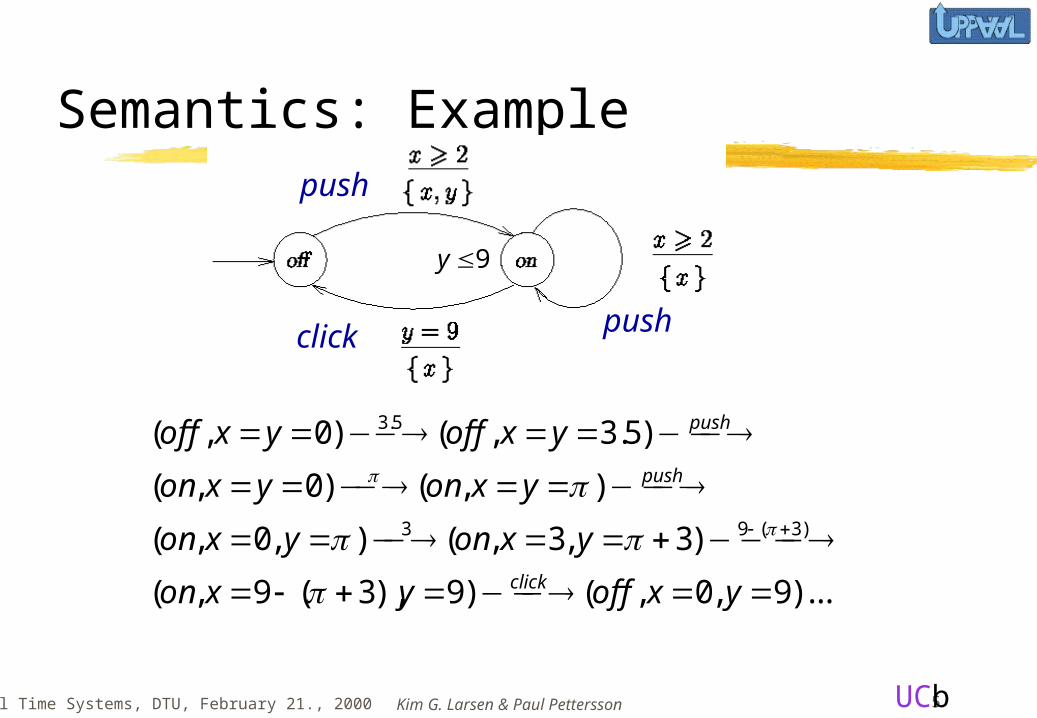
Semantics: Example
...)9,0,()9),3(9,(
)3,3,(),0,(
),()0,(
)5.3,()0,(
)3(93
5.3
yxoffyxon
yxonyxon
yxonyxon
yxoffyxoff
click
push
push
push
pushclick
9y
6Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
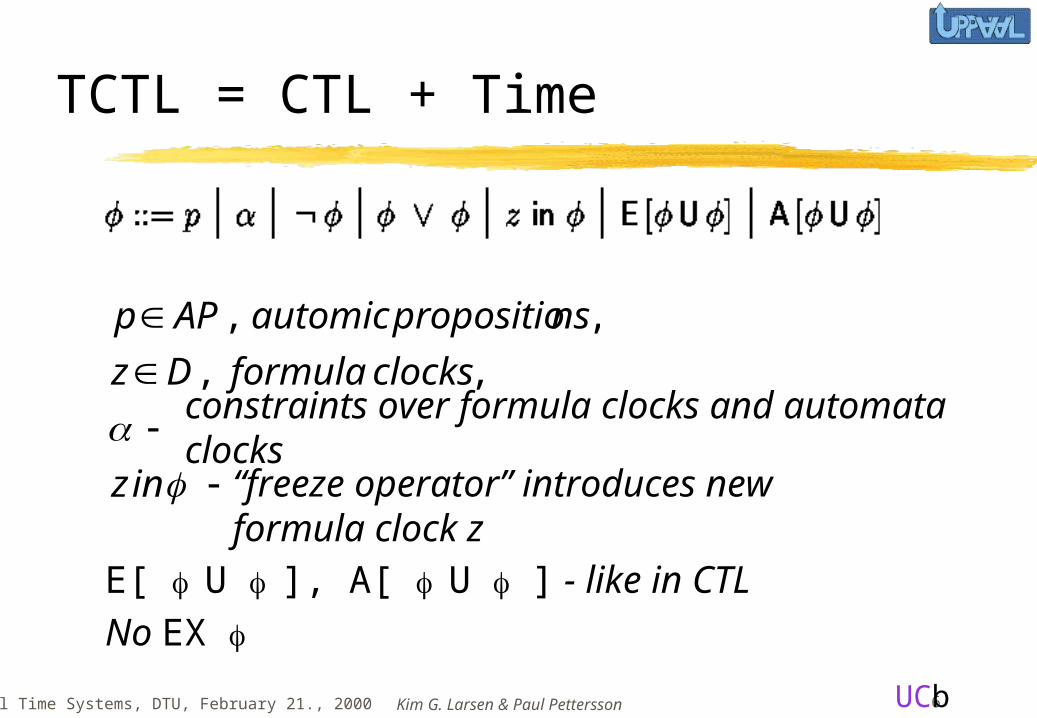
TCTL = CTL + Time
inz
clocksformulaDz
nspropositioautomicAPp
,,
,,
constraints over formula clocks and automata clocks
“freeze operator” introduces new formula clock z
E[ U ], A[ U ] - like in CTL
No EX

7Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Derived Operators
Along any path holds continuously until within 7 time units
becomes valid.
=
=
The property may becomes valid within 5 time units.

8Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Light Switch (cont)
push
pushclick
9y
onx
onx
xoff
xoff
xoff
offon
offon
yx
U E
U A
U E
U A
U A
)AFAG(
)AFAG(
)AG(
2
2
3
3
2
9

9Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Timeliness Properties
receive(m) always occurs within 5 time units after send(m)
receive(m) may occur exactly 11 time units after send(m)
putbox occurs periodically (exactly) every 25 time units
(note: other putbox’s may occur in between)

10Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
A1 B1 CS1V:=1 V=1
A2 B2 CS2V:=2 V=2
Init V=1
2´
VCriticial Section
Fischer’s ProtocolA simple MUTEX Algorithm
21 CSCS AG

11Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
A1 B1 CS1V:=1 V=1
A2 B2 CS2V:=2 V=2
Init V=1
2´
VCriticial Section
Fischer’s ProtocolA simple MUTEX Algorithm
Y<1
X:=0
Y:=0
X>1
Y>1
X<1
12
212
21
CS
CSCS
CSCS
EF
AF
AG

12Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Paths
Example:
push
pushclick
9y
...)9,0,()9),3(9,(
)3,3,(),0,(
),()0,(
)5.3,()0,(
)3(93
5.3
yxoffyxon
yxonyxon
yxonyxon
yxoffyxoff
click
push
push

13Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Elapsed time in path
...)9,0,()9),3(9,(
)3,3,(),0,(
),()0,(
)5.3,()0,(
)3(93
5.3
yxoffyxon
yxonyxon
yxonyxon
yxoffyxoff
click
push
push
Example:
14Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
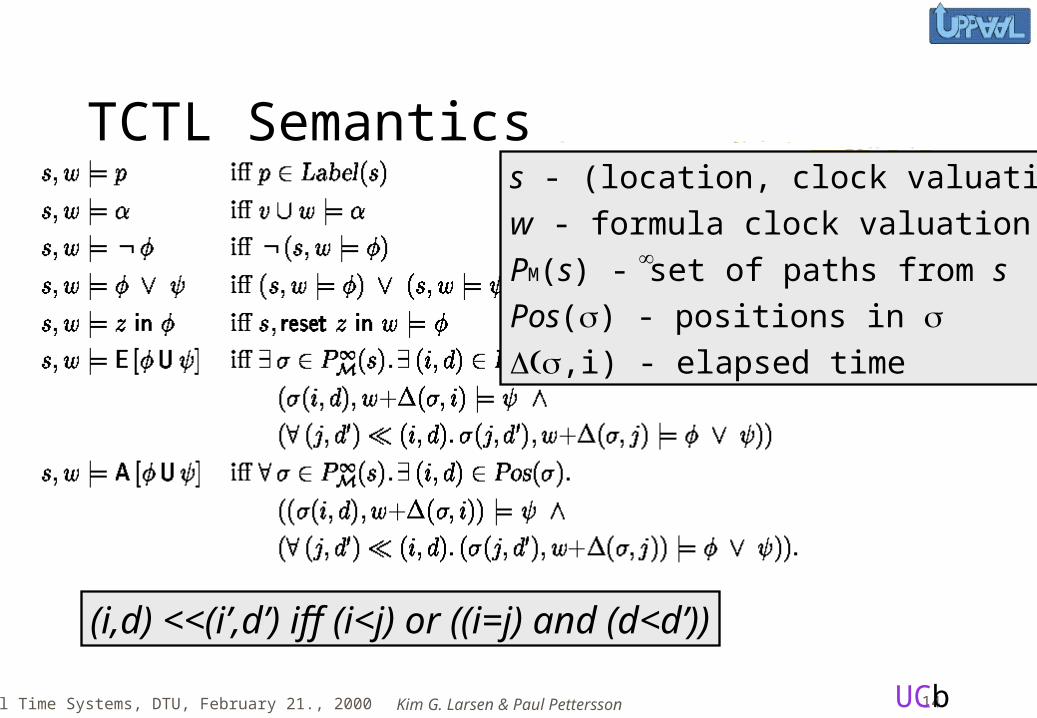
TCTL Semanticss - (location, clock valuation)
w - formula clock valuation
PM(s) - set of paths from s
Pos() - positions in ,i) - elapsed time
(i,d) <<(i’,d’) iff (i<j) or ((i=j) and (d<d’))
IDA foredrag 20.4.99 15
Region AutomataModel Checking

16Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Infinite State Space?

17Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
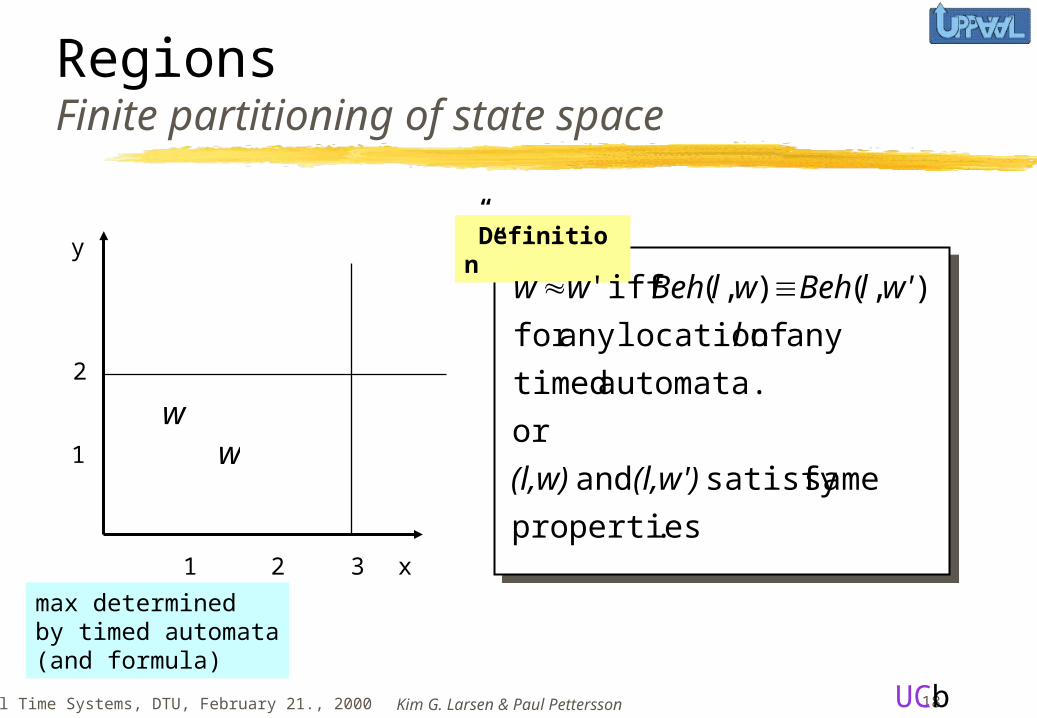
RegionsFinite partitioning of state space
x
y ”Definition”
.properties
samesatisfy and
or
automata. timed
any of locationany for
iff
(l,w')(l,w)
l
w'lBehwl Behww ),(),('
1 2 3
1
2
'ww
18Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
RegionsFinite partitioning of state space
x
y ”Definition”
.properties
samesatisfy and
or
automata. timed
any of locationany for
iff
(l,w')(l,w)
l
w'lBehwl Behww ),(),('
1 2 3
1
2
'ww
max determinedby timed automata(and formula)

19Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
RegionsFinite partitioning of state space
x
y Definition
max
'
n
nxxnx
w'www
jii
where
and
form the
of conditions same exact the
satisfy and iff
1 2 3
1
2
max determinedby timed automata(and formula)
'ww
Alternativeto JPK

20Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
RegionsFinite partitioning of state space
x
y Definition
max
'
n
nxxnx
w'www
jii
where
and
form the
of conditions same exact the
satisfy and iff
An equivalence class (i.e. a region)in fact there is only a finite number of regions!!
1 2 3
1
2

21Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
RegionsFinite partitioning of state space
x
y Definition
max
'
n
nxxnx
w'www
jii
where
and
form the
of conditions same exact the
satisfy and iff
An equivalence class (i.e. a region)
Successor regions, Succ(r)
r
1 2 3
1
2

22Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
RegionsFinite partitioning of state space
x
y
Definition
max
'
n
nxxnx
w'www
jii
where
and
form the
of conditions same exact the
satisfy and iff
An equivalence class (i.e. a region) r
{x}r
{y}r
r
Resetregions
sat
sat
then Whenever
','
,
''
vl,u
vl,u
vuuv
THEOREM
1 2 3
1
2

23Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Region graph of a simple timed automata

24Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Fischers again A1 B1 CS1V:=1 V=1
A2 B2 CS2V:=2 V=2Y<1
X:=0
Y:=0
X>1
Y>1
X<1
21 CSCS AG
A1,A2,v=1
A1,B2,v=2
A1,CS2,v=2
B1,CS2,v=1
CS1,CS2,v=1
Untimed case
A1,A2,v=1x=y=0
A1,A2,v=10 <x=y <1
A1,A2,v=1x=y=1
A1,A2,v=11 <x,y
A1,B2,v=20 <x<1
y=0
A1,B2,v=20 <y < x<1
A1,B2,v=20 <y < x=1
y=0
A1,B2,v=20 <y<1
1 <x
A1,B2,v=21 <x,y
A1,B2,v=2y=11 <x
A1,CS2,v=21 <x,y
No further behaviour possible!!
Timed case
PartialRegion Graph

25Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Modified light switch

26Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
)AFAG(
)AFAG(
)AG(
offon
offon
yx
9
Reachable partof region graph
Properties
27Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Roughly speaking....
Model checking a timed automata against a TCTL-formula amounts to
model checking its region graph against a CTL-formula
Model checking a timed automata against a TCTL-formula amounts to
model checking its region graph against a CTL-formula

28Real Time Systems, DTU, February 21., 2000 Kim G. Larsen & Paul Pettersson UCb
Problem to be solved
Model Checking TCTL is PSPACE-hard

IDA foredrag 20.4.99 29
END
Related Documents











