1 Sergej Jegorov, Piotr Wasiewicz 5-th DAMADICS Workshop Łagów, Poland, April 5th-7th, 2004 ACTUATOR BENCHMARK RESULTS: STEP I AND II

1 Sergej Jegorov, Piotr Wasiewicz 5-th DAMADICS Workshop Łagów, Poland, April 5th-7th, 2004 ACTUATOR BENCHMARK RESULTS: STEP I AND II.
Dec 20, 2015
Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
Sergej Jegorov, Piotr Wasiewicz
5-th DAMADICS Workshop Łagów, Poland, April 5th-7th, 2004
ACTUATOR BENCHMARK RESULTS: STEP I AND II

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
2
Presentation Plan
• Control Valve Introduction
• Step I
• Step II
• Conclusions

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
3
Actuator structureActuator structure
Process VariableProcess Variable
• CV – Control Value
• Z – Valve Position• P1 – Valve Input Pressure • P2 – Valve Output Pressure• F – Medium Flow Rate
• CV – Control Value
• Z – Valve Position• P1 – Valve Input Pressure • P2 – Valve Output Pressure• F – Medium Flow Rate
Control Valve Introduction

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
4
Considered models of control valve
• servomotor rod movement model(1)
• control valve model (2)
• actuator model (3)
• simplified model of the control valve (4)
• simplified model of actuator(5)
)(ˆ CVfZ
),,(ˆ21 PPZfF
),,(ˆ21 PPCVfF
)(ˆ ZfF
)(ˆ CVfF
Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
5
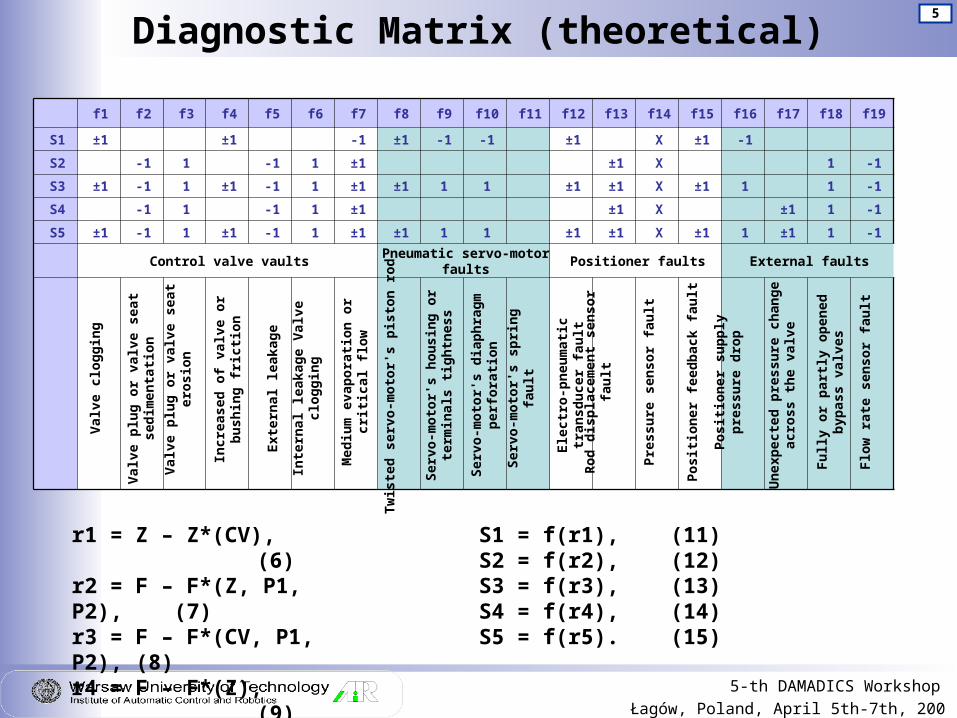
Diagnostic Matrix (theoretical)
f1 f2 f3 f4 f5 f6 f7 f8 f9 f10 f11 f12 f13 f14 f15 f16 f17 f18 f19
S1 ±1 ±1 -1 ±1 -1 -1 ±1 X ±1 -1
S2 -1 1 -1 1 ±1 ±1 X 1 -1
S3 ±1 -1 1 ±1 -1 1 ±1 ±1 1 1 ±1 ±1 X ±1 1 1 -1
S4 -1 1 -1 1 ±1 ±1 X ±1 1 -1
S5 ±1 -1 1 ±1 -1 1 ±1 ±1 1 1 ±1 ±1 X ±1 1 ±1 1 -1
Control valve vaultsPneumatic servo-motor
faultsPositioner faults External faults
S1 = f(r1), (11)S2 = f(r2), (12)S3 = f(r3), (13)S4 = f(r4), (14)S5 = f(r5). (15)
Val
ve c
logg
ing
Val
ve p
lug
or v
alve
sea
t se
dim
enta
tion
Val
ve p
lug
or v
alve
sea
t er
osio
n
Incr
ease
d of
val
ve o
r bu
shin
g fr
icti
on
Ext
erna
l lea
kage
Inte
rnal
leak
age
Val
ve c
logg
ing
Med
ium
eva
pora
tion
or
crit
ical
fl
ow
Tw
iste
d se
rvo-
mot
or's
pis
ton
rod
Serv
o-m
otor
's h
ousi
ng o
r te
rmin
als
tigh
tnes
s
Serv
o-m
otor
's d
iaph
ragm
pe
rfor
atio
n
Serv
o-m
otor
's s
prin
g fa
ult
Ele
ctro
-pne
umat
ic t
rans
duce
r fa
ult
Rod
dis
plac
emen
t se
nsor
fau
lt
Pre
ssur
e se
nsor
fau
lt
Pos
itio
ner
feed
back
fau
lt
Pos
itio
ner
supp
ly p
ress
ure
drop
Une
xpec
ted
pres
sure
cha
nge
acro
ss
the
valv
e
Ful
ly o
r pa
rtly
ope
ned
bypa
ss
valv
es
Flo
w r
ate
sens
or f
ault
r1 = Z – Z*(CV), (6)r2 = F – F*(Z, P1, P2), (7)r3 = F – F*(CV, P1, P2), (8)r4 = F – F*(Z), (9)r5 = F – F*(CV), (10)

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
6
FDI Structure
Inputs Outputs
Residuals Faults+
-
Fault detection Fault isolation
Process
Neural Network
Fuzzy logicController
FD using NN, FI using Fuzzy LogicFD using NN, FI using Fuzzy Logic
Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
7
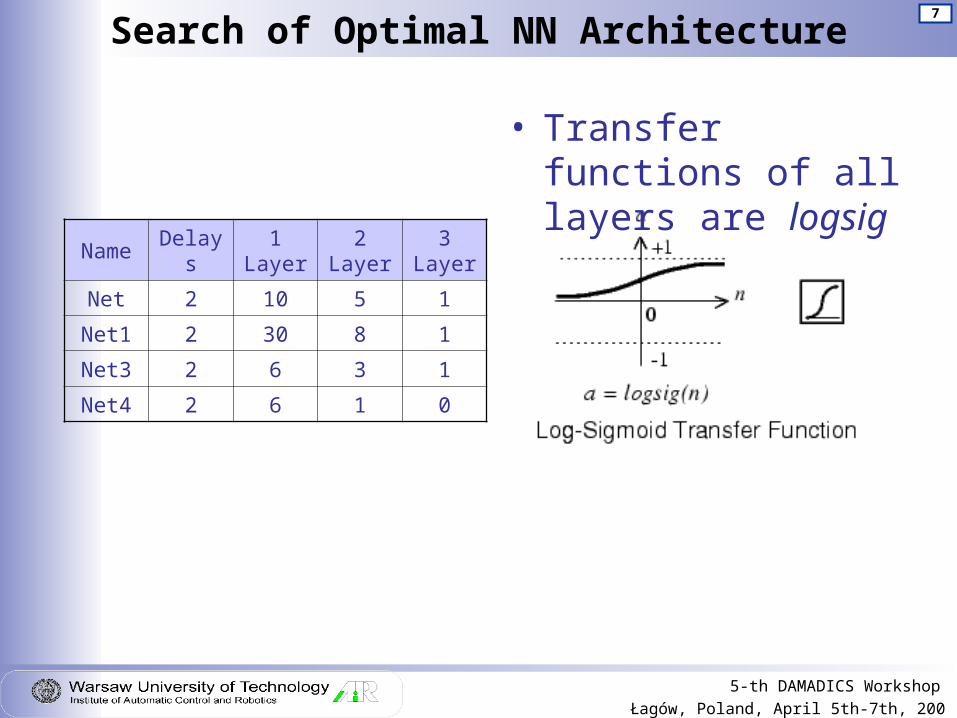
Search of Optimal NN Architecture
Name Delays1
Layer2
Layer3
Layer
Net 2 10 5 1
Net1 2 30 8 1
Net3 2 6 3 1
Net4 2 6 1 0
• Transfer functions of all layers are logsig

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
9
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
f_3f
1/24
f_t
Data Filtering
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
z
1
f_2f1/12
f_t
z
1
z
1
z
1
z
1
z
1
input_f_f4i1/6
input_f4i
filter1 filter2
filter3

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
10
NN Architecture Search. Training data without filtering
0 1000 2000 3000 4000 5000 6000-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
0 1000 2000 3000 4000 5000 6000-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8 net1
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6 net2
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6 net3
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
net4

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
11
Results achieved by applying filtering of measurements
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Fault f4Trained on filter1 but works on filter2
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 1000 2000 3000 4000 5000 6000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Fault f4 Trained on filter1 and filter2, but works on filter3
Blue – NN trained on filtr1Red – NN trained on filtr2

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
12Time Diagrams of real and modeled signals. NN trained applying filter2, but examined using filter3
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 NNr2
0 0.5 1 1.5 2 2.5
x 104
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0 0.5 1 1.5 2 2.5
x 104
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1 r2 res
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 NNr3
0 0.5 1 1.5 2 2.5
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0 0.5 1 1.5 2 2.5
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4 r3 res

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
13Time Diagrams of real and modeled signals. NN trained applying filter2, but examined using filter3
0 0.5 1 1.5 2 2.5
x 104
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0 0.5 1 1.5 2 2.5
x 104
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
NNr4
r4 residual
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
NNr5
0 0.5 1 1.5 2 2.5
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5
x 104
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
r5 residual

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
14
Measures of a Neural Networks "health"
-11 -9 -7 -5 -3 -1 1 3 5 7 9 110
20
40
60
80
100
120All Weights and Biases
-11 -9 -7 -5 -3 -1 1 3 5 7 9 110
5
10
15
20
25
30
35
40All Weights and Biases
-11 -9 -7 -5 -3 -1 1 3 5 7 9 110
5
10
15
20
25
30
35
40All Weights and Biases
-11 -9 -7 -5 -3 -1 1 3 5 7 9 110
5
10
15
20
25
30All Weights and Biases

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
15
Diagnostic Matrix (Practical)f1 f2 f3 f4 f5 f6 f7 f8 f9 f10 f11 f12 f13 f14 f15 f16 f17 f18 f19
S1 +1 +1 x +1 x x +1 x x X -1 +1
S2 -1 +1 x +1 x x x x +1 X +1 +1
S3 +1 -1 +1 +1 x +1 +1 x x +1 x x +1 X -1 +1 +1 +1
S4 -1 +1 x +1 x x x x +1 X -1 +1 +1
S5 +1 -1 +1 +1 x +1 +1 x x +1 x x +1 X -1 +1 -1 +1 +1
Control valve vaultsPneumatic servo-
motor faultsPositioner faults External faults
Val
ve c
logg
ing
Val
ve p
lug
or v
alve
sea
t se
dim
enta
tion
Val
ve p
lug
or v
alve
sea
t ero
sion
Incr
ease
d of
val
ve o
r bu
shin
g fr
ictio
n
Ext
erna
l lea
kage
Inte
rnal
leak
age
Val
ve c
logg
ing
Med
ium
eva
pora
tion
or c
ritic
al f
low
Tw
iste
d se
rvo-
mot
or's
pis
ton
rod
Serv
o-m
otor
's h
ousi
ng o
r te
rmin
als
tight
ness
Serv
o-m
otor
's d
iaph
ragm
per
fora
tion
Serv
o-m
otor
's s
prin
g fa
ult
Ele
ctro
-pne
umat
ic tr
ansd
ucer
fau
lt
Rod
dis
plac
emen
t sen
sor
faul
t
Pres
sure
sen
sor
faul
t
Posi
tione
r fe
edba
ck f
ault
Posi
tione
r su
pply
pre
ssur
e dr
op
Une
xpec
ted
pres
sure
cha
nge
acro
ss th
e va
lve
Fully
or
part
ly o
pene
d by
pass
val
ves
Flow
rat
e se
nsor
fau
lt .
DGN0 DGN1 DGN2 DGN3 DGN4 DGN5 DGN6
0 1 -1 0 0 -1 0
0 0 -1 1 0 0 0
0 1 -1 1 0 -1 0
0 0 -1 1 0 0 -1
0 1 -1 1 0 -1 -1
Fault free
f1, f4, f7, f10, f16
f2
f3, f6, f13, f18, f19
f5, f8, f9, f11, f12, f14
f15 f17

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
16
• Sugeno Type• Defuzzificatiom method is whatever (wtaver)
Fuzzification (Membership Functions)
Input Membership Functions Input Membership Functions r3, r5r3, r5
Input Membership Functions Input Membership Functions r1, r2, r4r1, r2, r4

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
17
Examples of results of isolation of fault 1

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
18
Examples of results of isolation of fault 3

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
19
Step I results (from forms S1-FF-fx)
f1 f1m f2 f2inc f3inc f4inc f5inc f6inc f7 f7m f8 f9 f10 f11
td 5s 15s 2s 8.278e+004s 5.378e+004s 4130s - 1.672e+004s 5s 5s - - 5s -
rfd 0% 0% 0% 0% 0% 0% - 0% 0% 0% - - 0% -
rtd0.98% 0.95% 0.99% 0.94% 0.72% 0.13% - 0.89% 0.98% 0.98% - - 0.98% -
fsd 0.75 0.5 0.75 0.98 0.64 1 - 0.19 0.75 0.5 - - 0.75 -
tit 5s 15s 2s 8.278e+004s 5.378e+004s 4130s - 1.672e+004s 5s 5s - - 5s -
rfi 0% 0% 0% 0% 0% 0% - 0% 0% 0% - - 0% -
rti 0.98% 0.95% 0.99% 0.92% 0.72% 0.02% - 0.89% 0.98% 0.98% - - 0.98% -
rmi 0% 0% 0.02% 0.38% 0.021% 0.12% - 0.01% 0.02% 0.01% - - 0.01% -
fsi 0.75 0.5 0.75 0.98 0.6403 1 - 0.19 0.75 0.5 - - 0.75 -
dacc 0.2 0.2 1 inf 0.2 0.2 - 0.2 0.2 0.2 - - 0.2 -

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
20
Step I results (from forms S1-FF-fx) continued
f12 f13 f13m f13inc f14 f15 f16 f17 f17 inc f18 f18m f18inc f19 f19m
td - 5s 6s 45s - 231s 7s 6s 640s 5s 6s 9409s 7s 7s
rfd - 0% 0% 0% - 0% 0% 0% 0% 0% 0% 0% 0% 0%
rtd- 0.98% 0.97% 0.97% - 0.92% 0.97% 0.97% 0.91% 0.98% 0.97% 0.93% 0.97% 0.97%
fsd - 0.75 0.5 0.07 - 0.75 0.75 0.76 0.17 0.75 0.5 0.112 0.75 0.5
tit - 5s 6s 45s - 240s 7s 35s 640s 5s 6s 9409s 7s 7s
rfi - 0% 0% 0% - 0% 0% 0% 0% 0% 0% 0% 0% 0%
rti - 0.98% 0.97% 0.97% - 0.66% 0.97% 0.90% 0.91% 0.98% 0.97% 0.93% 0.97% 0.97%
rmi - 0.01% 0% 0% - 0.28% 0% 0.07% 0.03% 0% 0% 0% 0% 0%
fsi - 0.75 0.5 0.07 - 0.75 0.75 0.75 0.17 0.75 0.5 0.112 0.75 0.5
dacc - 0.2 0.2 0.2 - 0.07 0.2 1 1 0.2 0.2 0.2 0.2 0.2

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
21
Step II results
scenario 1 2 3 4 5 6 7 8 9 10 11 12
Fault or group
DGN1 - DGN3 DGN5 - DGN5 DGN2 DGN5DGN5 or 1
DGN1 DGN1 DGN3
Start time 15073 - 37619 82491 - 80965 62438 24809 20778 24129 855 55196
Stop time inf - 73370 82519 - 80979 76487 24821 49064 35621 11963 80822
scenario 13 14 15 16 17 18 19 20 21 22 23 24
Fault or group
DGN6 DGN3 DGN5 DGN3 DGN3 DGN1 DGN1 - DGN2 DGN3 DGN3 DGN6
Start time 19817 58605 60001 30194 12430 1940 22556 - 18238 7400 5773 10717
Stop time 23743 77130 60014 Inf Inf 10039 35085 - Inf inf inf Inf

Łagów, Poland, April 5th-7th, 2004
5-th DAMADICS Workshop
22
Conclusions
• fault detection subsystem based on neural network technology was developed
• fault isolation subsystem based on fuzzy logic technology was developed
• Neuro-fuzzy FDI system is applicable for actuator fault diagnosis. Fault groups are distinguishable.
• Close to 1, true fault detection rates factors achieved in Step I confirms acceptable NN models quality
• High values of true fault isolation rates (Step I) confirms proper isolability features of fuzzy isolation scheme applied
• Results achieved in Actuator Benchmark Step I are highly acceptable
• The fault distinguishability problem exists because of limited availability of measurements when considering industrial benchmark Step II). In this case 6 fault groups are distinguishable.
Related Documents











