1 OPTIMAL CLUSTERING PROBLEMS Optimal clustering problem. Given two (irregular) objects bounded by circular arcs and/or straight line segments where free continuous rotations of the objects are permitted, find the minimal sizes of a given containing region (rectangle, circle, or convex polygon) according to a given objective (a polynomial function) and placement parameters of two objects such that the objects are placed completely inside the containing region without overlap and taking in to account allowable distances between objects. We consider a number of frequently occurring objectives, i.e. minimum area, perimeter, and homothetic coefficient of a given container. We assume that the object frontier is given by an ordered collection of frontier elements 1 2 , , ..., n l l l , (in counter clockwise order). Each element i l is given by tuple ( , , , , ) i i i i i c c x y r x y if i l is an arc or by tuple ( , , ) i i i x y r if i l is a line segment, where ( , ) i i x y is the starting point of i l , ( , ) i i c c x y is the centre point of an arc. We assume that element i l is a line segment, if 0 i r ; i l is a "convex" arc, if 0 i r ; i l is a "concave" arc, if 0 i r . We consider the following containing regions: a) an axis-parallel rectangle: ={( , ):0 ,0 } R xy x a y b of variable a and b in fixed position (Fig. 1 a), b) a circle of variable radius r: 2 2 ={( , ): } C xy x y r with origin at the center point (Fig. 1b), c) a convex polygon K : K is given by its variable sides i e , 1,..., i m (Fig. 1c), where each side 1 [ , ] i i i e v v of variable length i t is defined by two variable vertices ( , ) i i i v x y and 1 1 1 ( , ) i i i v x y , 1 cos i i i i x x t , 1 sin i i i i y y t . Therefore, each side i e may be given by variable vector ( , , , ) i i i i x y t , K is given by its verticies ( , ) i i i v x y , 1,..., i m , where is a variable homothetic coefficient and i x and i y are constant (Fig. 1d), subject to for original polygon 1 .

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

1
OPTIMAL CLUSTERING PROBLEMS
Optimal clustering problem. Given two (irregular) objects bounded by circular arcs
and/or straight line segments where free continuous rotations of the objects are permitted, find
the minimal sizes of a given containing region (rectangle, circle, or convex polygon) according
to a given objective (a polynomial function) and placement parameters of two objects such that
the objects are placed completely inside the containing region without overlap and taking in to
account allowable distances between objects. We consider a number of frequently occurring
objectives, i.e. minimum area, perimeter, and homothetic coefficient of a given container.
We assume that the object frontier is given by an ordered collection of frontier elements
1 2, , ..., nl l l , (in counter clockwise order). Each element il is given by tuple ( , , , , )i ii i i c cx y r x y
if il is an arc or by tuple ( , , )i i ix y r if il is a line segment, where ( , )i ix y is the starting point of
il , ( , )i ic cx y is the centre point of an arc. We assume that element il is a line segment, if 0ir ;
il is a "convex" arc, if 0ir ; il is a "concave" arc, if 0ir .
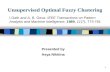
We consider the following containing regions:
a) an axis-parallel rectangle: = {( , ) : 0 , 0 }R x y x a y b of variable a and b in fixed
position (Fig. 1 a),
b) a circle of variable radius r: 2 2= {( , ) : }C x y x y r with origin at the center point
(Fig. 1b),
c) a convex polygon K :
K is given by its variable sides ie , 1, ...,i m (Fig. 1c), where each side
1[ , ]i i ie v v of variable length it is defined by two variable vertices
( , )i i iv x y and 1 1 1( , )i i iv x y , 1 cosi i i ix x t , 1 sini i i iy y t .
Therefore, each side ie may be given by variable vector ( , , , )i i i ix y t ,
K is given by its verticies ( , )i i iv x y , 1, ...,i m , where is a variable
homothetic coefficient and ix and iy are constant (Fig. 1d), subject to for
original polygon 1 .

2
Fig. 1 Containing region of variable metrical characteristics
We consider six realizations of the optimal clustering problem, denoted by P1, .., P6, with
respect to the shape of the containing region and the form of the objective function ( )F u :
P1: R , 1( ) =F u a b (area of R),
P2: R , 2 ( ) =F u a b (half-perimeter of R),
P3: C , 3( ) =F u r (radius of C),
P4: K , 41
( )m
ii
F u t
(perimeter of K),
P5: K , 5 1 11
( ) ( )m
i i i ii
F u x y y x
s.t. 1 1m , (doubled area of K),
P6: K , 6( ) =F u (homotetic coefficient of K).

3
Computational experiments In all cases the input data of the example has been provided in Appendix. For local
optimisation in our programs we use IPOPT (https://projects.coin-or.org/Ipopt) developed by
[1]. We use computer AMD Athlon 64 X2 5200+.
Example 1. We consider two triangles A and B and problem P2. The task is to find the
enclosing rectangle of minimal perimeter, i.e. ( ) =F u a b .
Example 1.1. Non-rotatable case. In this example we demonstrate the approach for
computing the global solution. We use Algorithm 1 to relise model (6)-(7). Figure 2 shows the
optimal arrangments of A and B which coorespond to six local minima of problem (4)-(5)
arising from the solution tree. Since all subproblems (7) are linear, we can find the global
Fig. 2 Arrangments of A and B of Example 1.1, corresponding to points *su , 1, , 6s

4
minima *( )F u of problem (6)-(7). In Figure 5, each solution point *su is the global minimum
of subproblem (5), 1, , 6s . Solution * 4*u u is the point of the global minimum of problem
(4)-(5). * 1* 2* 3* 4* 4*( ) min{ ( ), ( ), ( ), ( )} ( ) 7.6667.F u F u F u F u F u F u Running time is
0.06 sec.
Example 1.2. Continuous rotations are allowed, *( )F u a b = 6.3640. Running time is 0.109
sec, see Figure 3. We use Algorithm 1 to relize model (6)-(7).
Fig. 3 Arrangment of polygons A and B corresponding to point *u , Example 1.2
Example 2. We consider two rotated objects A and B, see Figure 4. We use Algorithm 2.
Example 2.1 Clustering of objects A and B into a rectangle R which looks like the optimal,
problem P1 (Figure 4a) , * * *( ) = 23.2253F u a b . Running time is 0.431 sec.
Example 2.2 Clustering of objects A and B into a circle C, which looks like the optimal,
problem P3 (Figure 4b) , * *( ) = = 3.2599F u r . Running time is 0.387 sec.
Example 2.3 Clustering of objects A and B into a rectangle R taking into account minimal
allowable distance =0.6 between objects, which looks like the optimal, problem P1 (Figure 4c).
* * *( ) = 27.685F u a b . Running time is 0.407sec.
Example 2.4 Polygonal approximation to the minimal convex hull of objects A and B , problem
P5 (Figure 4d) . * *( ) = = 42.6835F u S . Running time is 0.589 sec.
Example 2.5 Clustering of objects A and B into a convex pentagon K of minimal homotetic
coefficient, which looks like the optimal, problem P6 (Figure 7e). * *( ) = = 0.5259F u .
Running time is 0.401 sec.
A
B

5
(a) (b)
(c) (d) (e)
Fig. 4. Arrangement of objects A and B as described in Example 2: a) minimal enclosing
rectangle, b) minimal enclosing circle, c) minimal enclosing rectangle taking into account
distance constraints, d) minimal enclosing m-polygon, e) minimum homottetic coefficient
Example 3. We consider two irregular objects A and B , see Figure 5. We use Algorithm 2.
Example 3.1 . Optimal clustering of objects A and B in a circle of minimal radius, which looks
like the optimal, problem P3, (Figure 5a). F(u*)=8.5826.Running time is 0.531 sec
Example 3.2. Clustering of objects A and B in a circle of minimal radius with allowable
distance 0.3 , which looks like the optimal, problem P3, (Figure 5b). F(u*)=r*=11.3709.
Running time is 1.235 sec
Example 3.3. Clustering of objects A and B in a convex polygon of minimal area, which looks
like the optimal, problem P5, (Figure 5c). F(u*)=S*= 439.8638. Running time is 5.06 sec.
A
B
B
A
B
A
A B
A
B

6
(a) (b) (c)
Fig 5. Minimal enclosing container of objects A and B as described in Example 3: a) circle,
without distance constraints , b) circle, with distance constraints, c) convex m-polygon
Exanple 4. We consider two irregular objects A and B , see Figure 6. We use Algorithm 2.
Example 4.1 Clustering of objects A and B in a circle of minimal radius, which looks like the
optimal, problem P3, (Figure 6a). F(u*)=17.7674. Running time is 5.031 sec.
Example 4.2 Clustering of objects A and B in a rectangle of minimal area, which looks like
optimal, problem P1, (Figure 6b). F(u*)=1121.6867. Running time is 2.938 sec.
Example 4.3 Optimal clustering of objects A and B in a convex m-polygon, which looks like
optimal, problem P5, (Figure 6c). F(u*)=1736.6091. Running time is 10.375 sec.
(a) (b) (c)
Fig 6. Minimal enclosing regions for objects A and B of Example 4: a) rectangle, b)
circle, c) convex m-polygon
Example 5. The convex hull of two rotated convex polygons A and B , the optimal solution,
problem P5, see Figure 10a. F(u*) =387.5215. Running time is 0.14 sec. We use Algorithm 1.
B
A A
B
B
A
B
A

7
(a) (b)
Fig. 7 The convex hull for objects A and B: (a) two convex polygons, Example 5, (b) two non-
convex arc objects, Example 6.
Example 6. The convex hull for two rotated objects A and B, which looks like optimal, problem
P5, see Figure 9b. F(u*) =51.0228. Running time is 0.484 sec. We use Algorithm 2.
Example 7. An approximation of the convex hull for two convex polygons considering distance
constraints, which looks like the optimal, problem P5, see Figure 8. Data of polygons A and B,
are given for Example 1 in Appendix D. F(u*) =11.3211. Running time is 0.58 sec. We use
Algorithm 1.
Fig. 8. An approximation of the m-polygonal convex hull for two convex polygons of Example1
Example 8. An approximation of the convex hull for two non-convex objects, see Figure 12. We
use Algorithm 2.
Example 8. 1. An approximation of the convex hull of minimal area for two non-convex objects,
which looks like the optimal, problem P5, (Figure 9 a ), F(u*) =373.5249. Running time is 0.56
sec
Example 8. 2. An approximation of the convex hull of minimal perimeter for two non-convex
objects, which looks like the optimal, problem P4, (Figure 9b), F(u*) =55.0508 . Running time is
0.57 sec
A B
B
A
A
B

8
(a) (b)
Fig 9. An approximation of the m-polygonal convex hull for two non-convex objects of Example
8: (a) area of the convex hull, m=6 , (b) perimeter of the convex hull, m=8
[1]. Wachter, A., Biegler, L. T.: On the implementation of an interior-point filter line-search
algorithm for large-scale nonlinear programming.Mathematical Programming.106, 1, 25-57 (2006)
APPENDIX: Objects data and output data for examples Example_1. INPUT DATA
OBJECT A EX_1
Al (2, -1, 0, 0, 2, 0, -2, 0, 0)
OBJECT B EX_1
Bl (0, 0, 0, 3, 2, 0, 0, 2, 0)
Example_1 OUTPUT DATA
Example 1.1. * * * * * * *1 1 2 2= ( , , , , , )u a b x y x y = (4.0, 3.6667, 2.0, 1.0, 0.0 , 1.6667) .
Example 1.2. * * * * * * * * *1 1 1 2 2 2= ( , , , , , , , )u a b x y x y = (3.5355, 2.8284, 2.1213, 1.4142, 2.3562,
0.0791, 0.7591, 6.3087)
Example_2. INPUT DATA
OBJECT A EX_2 Al (-1.605, -2.125, -2.693, 0.829, -3.278, 1.892, -0.804, 0, 2.039, 1.369, 0, -0.2372, 2.0661, 0)
OBJECT B EX_2 Bl (2.022, -1.281, 1.843, 1.1539, 0.3449, 0.708, 2.133, 12.743, 7.836, -8.429,
-2.934, -1.619, -3.632, -0.276, -4.0936).
Example_2. OUTPUT DATA
Example 2.1.
A B
B
A

9
* * * * * * * * *1 1 1 2 2 2= ( , , , , , , , )u a b x y x y = (6.0977, 3.8089, 4.1637, 2.9426, 1.2554, 2.8937,
1.2500, -2.3398)
Example 2.2. * * * * * * * *
1 1 1 2 2 2= ( , , , , , , )u r x y x y = (3.2599 -0.2514 1.4905 -5.4582,-0.1020, -0.7134,
-9.01344)
Example 2.3. * * * * * * * * *
1 1 1 2 2 2= ( , , , , , , , )u a b x y x y (4.4249, 6.2566, 0.8663, 4.3227, 5.9678, 3.1659, 2.8858,
2.3858)
Example 2.4. m=11, * * * * * * * * * * * * * * *1 1 1 1 11 11 11 11= ( , , , , ..., , , , , , , , , , )A A A B B Bu x y t x y t x y x y =(3.7724,
0.0000, 2.3683, 0.8404, 3.1711, -0.5870, 2.8165, 0.8404, 2.3747, -0.8554, -3.0185, 0.8404,
1.5408, -0.7522, -2.5702, 0.8404, 0.8339, -0.2977, -2.1220, 1.1793, 0.2163, 0.70686, -1.6199,
4.4084, 0.0000, 5.1099, -0.0673, 3.5617, 3.5537, 5.3494, 0.5327, 0.0000, 3.5537, 5.3494,
1.3184, 1.3214, 3.8837, 4.0698, 1.5251, 2.6428, 4.0045, 1.4298, 1.7318, 1.4485, 0.9580 , 3.2641,
5.9187, 2.7233, 2.1026, 2.3254)
Example 2.5.
Pentagon K is given by a vector of coordinates of its vertices:
(7.0190, 1.4637, 0, 1.8053, 7.2809, 0, -5.3382, 4.1200, 0, -4.5396 -3.6507, 0, 3.0977 -5.2924, 0)
m=5, * * * * * * * *= ( , , , , , , )A A A B B Bu x y x y ( 0.5259 , 1.6035 1.1955 8.1947 -0.3486 -0.0779
10.8685)
Example_3 INPUT DATA
OBJECT A EX_3
Al ( 4.326, 6.395, -1.433, 2.914, 6.639, 1.56, 6.169, -2.405, 3.738, 7.189, 1.333, 7.212, 1.507, -0.143, 6.908, -0.553, 8.358, 3.78, 3.226, 8.266, 2.139, 4.645, -1.335, 1.574, 3.436, 0.749, 2.385, -41.479, 26.033, 35.267, -4.337, 7.015, 0.69, -4.999, 6.826, -4.974, 6.137, -11.293, -10.967, -3.435, -1.594, 2.865, -2.1027, -3.484, 1.944, -1.523, 1.186, -3.278, -1.925, 4.439, -4.36, 2.245, 18.437, -17.211, -10.975, -8.242, 5.133, -19.365, -19.496, -10.626, -3.431, 0.187, -0.727, -4.157, 0.218, -4.551, -0.393, -6.038, -1.879, 5.022, -6.914, 1.689, 1.485, -8.213, 0.971, -9.274, 2.01, -1.738, -8.923, 0.308, -8.055, -1.197, 7.273, -2.074, 2.942)
OBJECT B EX_3
Bl (2.493, 6.764, 1.771, 2.143, 5.028, 0.38, 5.191, -4.788, 1.364, 0.506, 4.149, 4.399, -1.876, 2.274, 4.368, 1.795, 2.554, 10.681, -0.594, -7.857, -1.702, 2.767, 8.905, 2.509, 10.614, 4.229, 1.877, -0.496, 4.671, 1.651, 4.781, 1.167, -16.555, 1.111, 17.31, -1.293, 0.931, 0.944, -1.623,

10
0.047, -1.214, -0.804, -10.767, 1.31, -11.271, 3.834, -0.804, -1.324, 3.524, -2.091, 3.361, -3.405, -40.094, 8.293, 36.385, -2.239, -2.301, 0.723, -2.193, -3.023, -2.003, -3.72, -4.687, -1.968, -8.407, 1.231, -4.981, -2.155, -0.867, -5.474, 0.837, -6.794, -1.946, -0.701, -5.602, -2.239, -6.794, 1.103, -3.112, -7.469, -3.423, -8.528, 7.762, 0.541, -1.854, 2.0200 -9.4743 8.4740 -0.1576 -1.2849).
Example 3. OUTPUT DATA
Example 3.1. * * * * * * * *1 1 1 2 2 2= ( , , , , , , )u r x y x y = (8.5826, 2.6036, 4.1595, -1.9849, 1.1292, -
0.5965 -4.4319)
Example 3.2. * * * * * * * *1 1 1 2 2 2= ( , , , , , , )u r x y x y = (5.6452, 4.7846, -1.3617, -1.1846, -3.5867, -
3.6332)
Example 3.3.
m=24, * * * * * * * * * * * * * * *1 1 1 1 24 24 24 24= ( , , , , ..., , , , , , , , , , )A A A B B Bu x y t x y t x y x y (-5.3369, -8.5664, -
2.6532, 2.4302, -7.4829, -7.4261, -2.3683, 2.4302, -9.2220, -5.7287, -2.0835, 2.4302, -10.4141, -
3.6120, -1.7987, 2.4302, -10.9631, -1.2436, -1.5138, 2.4302, -10.8247, 1.1826, -1.2290, 2.4302,
-10.0101, 3.4722, -0.9441, 1.2151, -9.2975, 4.4564, -0.8760, 0.9460, -8.6918, 5.1831, -0.6335,
1.8920, -7.1669, 6.3030, -0.3909, 1.8920, -5.4177, 7.0239, -0.2271, 1.3731, -4.0798, 7.3330,
0.0182, 4.0874, 0.00688, 7.2587, 0.3034, 2.2215, 2.1269, 6.5950, 0.6065, 2.2215, 3.9522,
5.3288, 0.9096, 2.2215, 5.3164, 3.5755, 1.2127, 2.2215, 6.0950, 1.4949, 1.5158, 2.22150,
6.2171, -0.7232, 1.8189, 2.2215, 5.6716, -2.8767, 2.1220, 2.2215, 4.5081, -4.7695, 2.3619,
4.8634, 1.0496, -8.1884, 2.6565, 0.5084, 0.5998, -8.4255, 2.7755, 1.2151, -0.5346, -8.8605,
3.0603, 2.4302, -2.9569, -9.0577, -2.9380, 2.4302, 2.1774, 1.4609, 4.9044, -1.7436, -1.6084,
2.4573)
Example_4 INPUT DATA
OBJECT A EX_4
Al (0.916, -3.2835, -2.1141, -1.1925, -3.4331, -3.1599, -4.2069, 1.5176, -4.5722, -4.7624, -6.0118, -5.243, -1.9194, -7.8323, -5.8509, -9.7247, -5.5302, 6.5362, -16.1691, -4.4383, -10.9427, -0.5133, 0.531, -11.3672, -0.8321, -11.8691, -0.6587, 6.4935, -5.7318, -2.7797, -11.614, -5.5302, -10.3158, -20.9587, -9.8998, -10.6432, -9.9873, 1.0287, -9.8552, -10.6486, -9.5622, -11.6347, 12.1386, -19.1497, -4.1899, -7.9948, -8.9767, -0.8426, -7.1675, -9.1368, -6.3926, -8.8058, 1.509, -5.0049, -8.213, -3.5952, -8.7513, -2.7401, -1.0353, -9.7286, -0.3511, -7.0753, -2.5557, 0.6609, -9.4221, 2.6318, -7.7951, 3.383, 5.924, -7.0167, 5.1053 ,-3.7343, -2.0191, 5.7366, -1.8164, 4.5707, -0.1679, 5.8141, -0.784, 2.0974, 4.2101, 5.0745, 2.1588, 2.3558, 3.9691, 2.1899, 6.1215, -0.8636, 2.1236, 6.9825, 1.721, 7.7466, 1.7119, 0.9229, 9.2611, 0.7867, 10.9676,-1.2333, 0.6886,12.1970,1.1388,13.3452,2.0740, 1.8957, 15.2761, 3.2381, 16.8571, 2.0329, 1.9223,

11
15.3074, -0.0714, 15.7046 -0.8439,-0.8991,15.8695,-1.5973,15.3956,1.5839,-2.9079, 14.5062, -3.3626, 12.9889, -1.2291, -3.7155, 11.8116, -2.5921, 11.3130,-1.0093,-3.5146, 11.7225, -4.2379, 11.0185, 0.9691, -4.9323, 10.3426, -4.8298, 9.3789, -1.7325, -4.6465, 7.6562, -4.5749, 5.9252, 2.3942, -4.4760, 3.5330, -4.0691, 1.1736, -3.8135, -3.4210, -2.5844, -0.6502, 0.0357, -5.8961, -4.9343, -4.0153)
OBJECT B EX_4
Bl (-3.9051, 15.6754, 3.6105, -6.3238, 12.9949, -5.4522, 9.4912, -1.7667, -4.4782, 8.0172, -5.7334, 6.7739, -7.4716, -6.5223, 14.2038, -8.5183, 7.0037, -5.0616, -13.3461, 5.4831, -8.3588, 4.6188, 6.9000, -2.9414, 0.3454, -9.7608, -0.7063, 4.6404, -11.0770, 3.7435, -6.4367, 3.7287, 1.0321, -5.8343, 4.5668, -4.8427, 4.8531, -1.5625, -3.2958, 4.6331, -1.7954, 4.1972, 0.9511, -1.0711, 3.5808, -0.7171, 2.6980, -8.0493, 2.2783, -4.7732, 9.5968, -8.1244, -4.6532, 5.3660, -6.1871, 1.0175, -7.8433, 1.0906, -0.0017, -8.2314, -1.0922, -8.2181, -3.8299, -4.9218, -8.1712, -3.1081, -11.5444, -3.3853, -4.7112, -8.5628, -8.0775, -8.9208, 1.1200, -9.1913, -9.0393, -10.2810, -8.7803, -1.2462, -11.4934, -8.4921, -11.2655, -9.7173, 1.8333, -10.9302, -11.5197, -10.6091, -13.3247, -4.1852, -9.8762, -17.4452, -5.9678, -15.9483, 2.5006, -3.6327, -15.0539, -1.7485, -16.6979, -71.089, 51.8177, -63.4345 1.6738 -13.0436 -2.7890, 3.6411, -15.0206, 5.9870, -13.5121, 1.6693, 7.3910, -12.6092, 9.0343, -12.9031, -12.2743, 21.1169, -15.0634, 13.7224, -5.2665, 3.2491, 11.7650, -2.6732, 13.2536, 0.2149, -4.2809, 15.2149, 4.0201, 11.5659, 6.2586, 1.4523, 10.3279, 7.0180, 10.1594, 8.4605, -7.0745, 9.3387, 15.4872, 4.3461, 10.4751, 0.7968, 3.7838, 9.9105, 3.1741, 9.3975, -1.5498, 1.9882, 8.3997, 1.4863, 9.866, 2.0727, 0.8151, 11.8271, 2.8459, 11.4121, -1.7315, 4.5423, 11.0654, 5.2837, 12.6302, 0.8337, 5.6407, 13.3836, 6.4089, 13.7077, 4.1508, 2.5845, 12.0942, 1.6738, 16.1439, -20.4365, -2.8097, 36.0825)
Example 4. OUTPUT DATA
Example 4.1. * * * * * * * *1 1 1 2 2 2= ( , , , , , , )u r x y x y = (17.7674, -1.2785, 5.0441, -2.7258, -0.2362, -
2.6272, 1.8515)
Example 4.2. * * * * * * * * *1 1 1 2 2 2= ( , , , , , , , )u a b x y x y =(32.8975, 34.0964, 22.0452, 19.8732, 4.7927,
15.1417, 16.3673, 3.0874)
Example 4.3. u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u , m=22, where
* * * * * * * *1 1 1 1( , , , , ..., , , , )m m m mx y t x y t = (32.1154, -1.3741, 2.4936, 9.2842, 24.7132, -6.9780, 2.6752,
0.2644, 24.4770, -7.0969, 2.8567, 10.1271, 14.7581, -9.9431, 3.0798, 0.7279, 14.0316, -9.9880,
-2.9803, 0.7279, 13.3131, -9.8711, -2.7572, 0.7279, 12.6384, -9.5981, -2.5341, 11.4076, 3.2719,
-3.0864, -2.17501, 0.6059, 2.9277, -2.5878, -1.8159, 12.0635, 0.0000, 9.1151, -1.4215, 0.9994,
0.14867, 10.1034, -1.0270, 14.4742, 7.6372, 22.4899, -0.6472, 1.3006, 8.6747, 23.2741, -0.2674,
1.3006, 9.9291, 23.6177, 0.1125, 16.8834, 26.7059, 21.7236, 0.5216, 0.4268, 27.0760, 21.5110,
0.9306, 11.0851, 33.6978, 12.6210, 1.0337, 0.8197, 34.1172, 11.9168, 1.3810, 1.1366, 34.3316,
10.8006, 1.6580, 9.9226, 33.4677, 0.9157, 1.8892, 0.9642, 33.1660, 0.0000, 2.1204, 0.9641,

12
32.6624,-0.82219,2.3517,0.7771), * *( , )A Bu u =(14.6660,12.1616, 3.334, 17.4147, 4.9045, 1.6176).
Example 5. INPUT DATA
OBJECT A EX_5 Al =(-7.2662, 1.5935, 0, -5.9413, -6.8803, 0, -3.2915, -8.7340, 0, 2.3109, -10.6633, 0 6.7020, -
10.6633, 0) OBJECT B EX_5
Bl =(-1.443, -4.819, 0. 2.67, -1.107, 0. 2.089,7 4.41, -4.991, -2.885, 3.884, 0.83, 0.55, 0, -1.443, 2.605, -5.001, -4.7927, -1.107, 8 0.11, -0.12, -5.0, -2.885, 3.884, -2.879, -1.116, 0. 0.21, -1.116, -5.0, -4.7927, -1.109)
Example 5. OUTPUT DATA
m=10, u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u =(10.0238, -2.2864, 3.0242, 3.2338, 6.8123, -
2.6651, -2.4537, 8.5767, 0.186, 2.7804, -1.5931, 8.3482, 0, 11.1266, -0.9437, 9.1846, 5.3899, 18.5634, -
0.2207, 15.5024, 20.5161, 21.9577, 1.463, 7.9482, 21.3712, 14.0556, 1.8004, 11.4346, 18.7688, 2.9211,
2.4138, 0.0001, 18.7688, 2.921, 2.4138, 4.391, 15.4903, 0, 2.7454, 5.925, 6.6713, 6.4244, 5.5554,
6.6713, 6.4244, 5.5554)
Example 6. INPUT DATA
OBJECT A EX_6
Al =(-1.4427, -4.8186, 0, 2.6700, -1.1068, 0, 2.089, 4.4005, -1, 0.830000, 0.5500, 0, -1.4427, 2.6050, 0,
-0.1100, -0.1100, -1, -2.8787, -1.1163, -1, 0.2100, -1.1163, 0, -1.4427, -4.8186, -1)
OBJECT B EX_6
Bl =(-1.4427, -4.8186, 0, 2.6700, -1.1068, 0, 2.0887, 4.4005, -1, 0.8300, 0.5500, 0, -1.4427, 2.6050, 0, -
0.1100, -0.1100, -1, -2.8787, -1.1163, -1, 0.2100, -1.1163, 0, -1.4427, -4.8186, -1)
Example 6. OUTPUT DATA
m=6, u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u = (0.0889, 5.3038, -1.5932, 3.9616, 0, 9.2643,
0.3428, 5.5377, 5.2157, 7.4031, 1.2794, 5.5372, 6.8065, 2.099, 1.5484, 3.9615, 6.896, -1.8612, -2.7988,
5.5379, 1.6797, 0, -1.8622, 5.5372, 3.0618, 5.4759, 5.1604, 3.8337, 1.9273, 2.019)
Example 7.
INPUT DATA
0.2 is allowable distance between polygons A and B (see input data on polygons of example 1).
OUTPUT DATA

13
m=16, u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u = (5.3365, -0.1823, 2.5860, 2.9023, 2.8708, -
1.7132, 2.7833, 0.2494, 2.6372, -1.8006, 3.0773, 0.0592, 2.5782, -1.8045, 3.3713, 2.0522, 0.5799, -
1.3371, -2.6874, 0.045, 0.5394, -1.3173, -2.463, 0.0451, 0.5043, -1.289, -2.2386, 0.0451, 0.4764, -
1.2536, -2.0142, 0.045, 0.4571, -1.2129, -1.7898, 0.045, 0.4473, -1.169, -1.5655, 0.0451, 0.4475, -
1.1239, -1.341, 3.1296, 1.1603, 1.9235, -0.3583, 0.3955, 1.5307, 2.0621, 0.4747, 4.2656, 5.3246,
0.1123, 1.0025, 0.1081, 5.3827, 0.0212, 1.5303, 0.1081, 5.3871, -0.0868, 2.0581, 0.1081, 3.2376,
0.4146, 3.3713, 2.5949, -1.6030, 17.5085)
Example 8. INPUT DATA
OBJECT A EX_8 and OBJECT B EX_8
Al = Bl =( 2.0, 7.0, 0, -4.0, -3.0, 0, 0, -5.0, -2.5, 1.5, -3.0, 3.0, -5.0, 0, 11.0, 0, -8.0623, 10.0, 8.0)
Example 8. OUTPUT DATA
Example 8.1. m=6, u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u = (20.2289, -2.57832, 1.4978
4.4721, 20.5550, -7.0386, 3.1454, 11.6619, 8.8932, -6.9943, -2.4381, 11.6619, 0.0000, 0.5497, -
0.7467, 11.4018, 8.3684, 8.2938, 0.6766, 13.2450, 18.6952, 0.0000, 1.0342, 3.0000, 15.9317, -
5.1345, 4.1758, 6.5824, -2.5603, 4.8755)
Example 8.2. m=8, u*= * * * * * * * * * *1 1 1 1( , , , , ..., , , , , , )m m m m A Bx y t x y t u u = ( 0, 4.4189, -0.3471,
10.6193, 9.9858, 8.0318, 0.3941, 9.4340, 18.696, 4.4093, 0.9527, 3, 20.435, 1.9643, 1.4164,
4.4721, 21.123, -2.4546, 2.794, 10.6193, 11.1372, -6.0674, -2.7475, 9.434, 2.4264, -2.445, -
2.1889, 3, 0.688, 0, -1.7252, 4.4721, 16.3601, -0.9331, 4.0943, 4.7629, 2.8974, 0.9527)
Related Documents