© Manhattan Press (H.K.) Ltd. 1 • Scalar and vector Scalar and vector quantities quantities • • Manipulation of Manipulation of vectors vectors 1.3 Vectors and 1.3 Vectors and resolution of resolution of forces forces • • Forces in Forces in equilibrium equilibrium

Welcome message from author
This document is posted to help you gain knowledge. Please leave a comment to let me know what you think about it! Share it to your friends and learn new things together.
Transcript

© Manhattan Press (H.K.) Ltd. 1
• Scalar and vector quantitiesScalar and vector quantities
• • Manipulation of vectorsManipulation of vectors
1.3 Vectors and 1.3 Vectors and resolution of forcesresolution of forces
• • Forces in equilibriumForces in equilibrium

© Manhattan Press (H.K.) Ltd. 2
Scalar and vector quantities
1.3 Vectors and resolution of forces (SB p. 47)
A scalar quantity is one which can be described fully by just stating its magnitude.
1. Scalar quantities
e.g.mass, time, length, temperature, density, speed, energy, volume
© Manhattan Press (H.K.) Ltd. 3
Scalar and vector quantities
1.3 Vectors and resolution of forces (SB p. 48)
A vector quantity is one which can only be fully described if its magnitude and direction are stated.
2. Vector quantities
e.g.displacement, velocity, acceleration, force, momentum, magnetic flux, electric intensity

© Manhattan Press (H.K.) Ltd. 4
Scalar and vector quantities
1.3 Vectors and resolution of forces (SB p. 48)
2. Vector quantities
Represented by:

© Manhattan Press (H.K.) Ltd. 5
Scalar and vector quantities
1.3 Vectors and resolution of forces (SB p. 48)
2. Vector quantities

© Manhattan Press (H.K.) Ltd. 6
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 48)
1. Addition of vectors (P and Q)
parallelogram of vectors
Go to
Common Error
Resultant
P + Q

© Manhattan Press (H.K.) Ltd. 7
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 49)
1. Addition of vectors (P and Q)
triangle of vectors

© Manhattan Press (H.K.) Ltd. 8
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 49)
2. Subtraction of vectors (P and Q)

© Manhattan Press (H.K.) Ltd. 9
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 49)
3. Resolution of vector
vector R = resultant of 2 vectors (A, B or C, D or E, F)
A, B or C, D or E, F are components of R

© Manhattan Press (H.K.) Ltd. 10
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 50)
3. Resolution of vector
R to 2 perpendicular directions
(resolution of vector)

© Manhattan Press (H.K.) Ltd. 11
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 50)
3. Resolution of vector
Rx = R cosθ; Ry = R sinθ
tanθ = Ry/Rx
R = 22yx RR

© Manhattan Press (H.K.) Ltd. 12
Manipulation of vectors
1.3 Vectors and resolution of forces (SB p. 51)
3. Resolution of vector
e.g.
(a) a horizontal component
X = F cosθ
(b) a vertical component
Y = F sinθ

© Manhattan Press (H.K.) Ltd. 13
Forces in equilibrium
1.3 Vectors and resolution of forces (SB p. 52)
Note:
For simplicity, the vector notation ( → ) is omitted in describing the forces in the following chapters.
1. Addition of forces
Go to
More to Know 7More to Know 7
P, Q, R, S, T in equilibrium?

© Manhattan Press (H.K.) Ltd. 14
Forces in equilibrium
1.3 Vectors and resolution of forces (SB p. 53)
1. Addition of forces
The polygon of forces states that if the forces acting on a point can be represented in magnitude and direction by the sides of a polygon, then the forces are in equilibrium.
In equilibrium (can form polygon)

© Manhattan Press (H.K.) Ltd. 15
Forces in equilibrium
1.3 Vectors and resolution of forces (SB p. 53)
2. Resultant of a number of forces
Not in equilibrium (cannot form polygon)
R = resultant of forces
Go to
Example 3Example 3
Go to
Example 4Example 4
© Manhattan Press (H.K.) Ltd. 16
Forces in equilibrium
1.3 Vectors and resolution of forces (SB p. 55)
3. Forces in equilibrium
Go to
Example 5Example 5
In equilibrium,
algebraic sum of components = 0
Go to
Common Error
Go to
Example 6Example 6
Go to
Example 7Example 7Go to
Example 8Example 8
Go to
Example 9Example 9

© Manhattan Press (H.K.) Ltd. 17
End

© Manhattan Press (H.K.) Ltd. 18
1.3 Vectors and resolution of forces (SB p. 48)
The magnitude of the resultant force is not necessarily greater than those of its components of forces.
Return to
TextText

© Manhattan Press (H.K.) Ltd. 19
1.3 Vectors and resolution of forces (SB p. 52)
Concurrent & coplanar forces
The forces shown in Fig. 1.22(a) are concurrent and coplanar forces. When the force vectors all intersect at one point, the forces are known as concurrent. When the problem involves forces in two dimensions only, the forces are said to be coplanar as they all lie on the same plane.
Return to
TextText

© Manhattan Press (H.K.) Ltd. 20
Q:Q: The forces acting on a point O are shown in the figure below. Find the magnitude and direction of the resultant.
Solution
1.3 Vectors and resolution of forces (SB p. 54)

© Manhattan Press (H.K.) Ltd. 21
Solution:Solution:
Return to
TextText
Algebraic sum of components of forces along Ox,
X = A cos15° + B cos30° + C cos120° + D cos225°
= 4 cos15° + 3 cos30° + 3 cos120° + 2 cos225° = 3.55 N
Algebraic sum of components of forces along Oy,
Y = 4 sin15° + 3 sin30° + 3 sin120° + 2 sin225° = 3.72 N
The magnitude of the resultant
R = = 5.14 N
tanθ=
∴ θ= 46.3°
The resultant is 5.14 N at an angle 46.3° to the direction Ox.
2222 723553 ..YX
553723..
XY
1.3 Vectors and resolution of forces (SB p. 54)

© Manhattan Press (H.K.) Ltd. 22
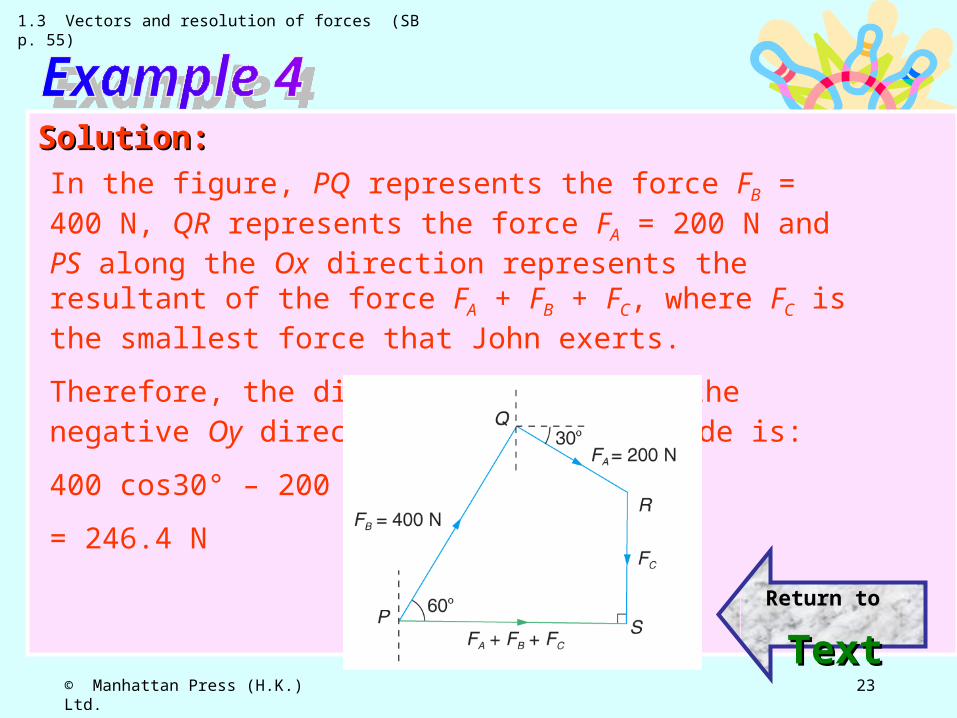
Q:Q: Sam, Brian and John attempt to push an
object in the direction Ox. Sam exertsa force of 200 N at a direction 30° to Ox, and Brian exerts a force of 400 N at60° to Ox as shown in the figure.What are the magnitude and direction of the smallest force that John should exert such that the resultant of all three forces acts along Ox?
Solution
1.3 Vectors and resolution of forces (SB p. 54)
© Manhattan Press (H.K.) Ltd. 23
Solution:Solution:
Return to
TextText
In the figure, PQ represents the force FB = 400 N, QR represents the force FA = 200 N and PS along the Ox direction represents the resultant of the force FA + FB + FC, where FC is the smallest force that John exerts.
Therefore, the direction of FC is in the negative Oy direction and the magnitude is:
400 cos30° – 200 cos60°
= 246.4 N
1.3 Vectors and resolution of forces (SB p. 55)
© Manhattan Press (H.K.) Ltd. 24
Although the forces are in equilibrium, the object is not necessary to be in “static equilibrium”. We will learn the conditions for static equilibrium in Section 1.5. Return to
TextText
1.3 Vectors and resolution of forces (SB p. 55)
© Manhattan Press (H.K.) Ltd. 25
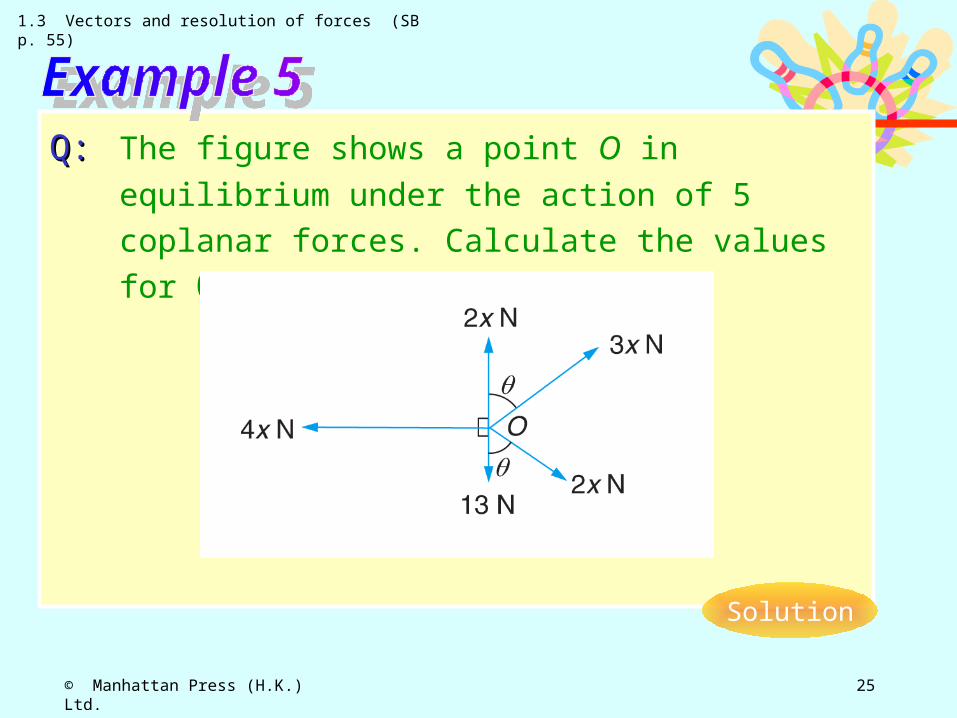
Q:Q: The figure shows a point O in equilibrium
under the action of 5 coplanar forces. Calculate the values for θand x.
Solution
1.3 Vectors and resolution of forces (SB p. 55)

© Manhattan Press (H.K.) Ltd. 26
Solution:Solution:Since the forces are in equilibrium, the algebraic sum of the componentsof the forces in any direction is zero.Algebraic sum of components of forces along OX = 03x sinθ + 2x cos90° + 4x cos180° + 13 cos270° + 2x sinθ = 05x sinθ − 4x = 0
sinθ = 4/5θ = 53° 8’
Algebraic sum of components of forces along OY = 03x cosθ + 2x − 2x cosθ − 13 = 02x + x cosθ = 132 x + x (3/5) = 13
(13/5) x = 13 ∴ x = 5
1.3 Vectors and resolution of forces (SB p. 56)
Return to
TextText
© Manhattan Press (H.K.) Ltd. 27
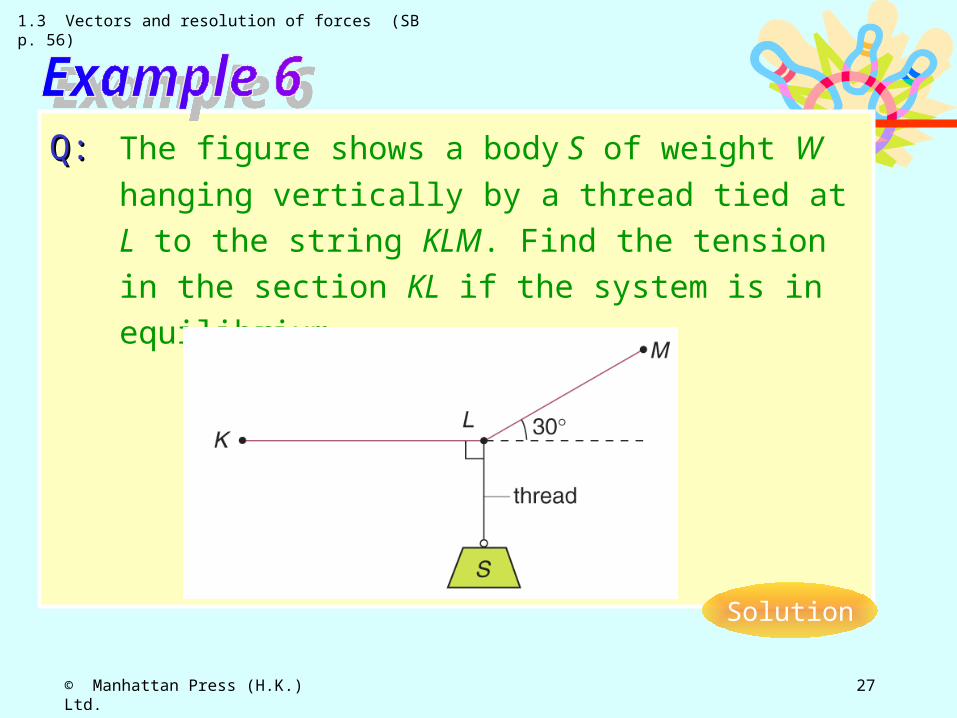
Q:Q: The figure shows a body S of weight W
hanging vertically by a thread tied at L to the string KLM. Find the tension in the section KL if the system is in equilibrium.
Solution
1.3 Vectors and resolution of forces (SB p. 56)

© Manhattan Press (H.K.) Ltd. 28
Solution:Solution:Since the forces W, T and F are in equilibrium, the resultant of the three forces must be zero. Therefore, the algebraic sum of the components of the forces in any direction must be zero.Algebraic sum of components of forces along LX = 0.F cos30° + (− T) = 0
F cos30° − T = 0T = F cos30° ............... (1)
Algebraic sum of components of forces along LY = 0.F sin30° + (− W) = 0
F sin30° − W = 0W = F sin30° ................ (2)
(1)/(2)
1.3 Vectors and resolution of forces (SB p. 56)
60tan30tan
30tan1
30sin30cos
WWT
WT
Return to
TextText

© Manhattan Press (H.K.) Ltd. 29
Q:Q: The figure shows a picture of weight 10.0 N
hanging freely by a cord EFG. Find the tension T in the cord.
Solution
1.3 Vectors and resolution of forces (SB p. 57)

© Manhattan Press (H.K.) Ltd. 30
Solution:Solution:
Since the picture is in equilibrium, algebraic sum of vertical components of the forces = 0.
T sin60° + T sin60° − 10.0 = 0
2T sin60° = 10.0
∴ T =
= 5.77 N
1.3 Vectors and resolution of forces (SB p. 58)
60sin 2010.
Return to
TextText

© Manhattan Press (H.K.) Ltd. 31
Q:Q: A mass of 5 kg hangs from two light strings of
lengths 3 m and 4 m from two points at the same level and 5 m apart. Find the tension in each of the strings. (Assume g = 9.81 m s−2.)
Solution
1.3 Vectors and resolution of forces (SB p. 58)

© Manhattan Press (H.K.) Ltd. 32
Solution:Solution:
Since the forces are in equilibrium, algebraic sum of the forces along CX = 0.
T2 sinθ−T1 cosθ= 0
T2 = ..........................(1)
Also, algebraic sum of the forces along CY = 0.
T2 cosθ+ T1 sinθ−W = 0
Substituting T2 from (1),
1.3 Vectors and resolution of forces (SB p. 59)
N 429N 23943
tan1
sincos
N 23954)8195(sin
sinsincos
sinsincos
112
1
22
1
11
2
..TTT
..WT
WT
WTT
θθθθ
θθθ
θθθ
Return to
TextText
1sincos Tθ
θ

© Manhattan Press (H.K.) Ltd. 33
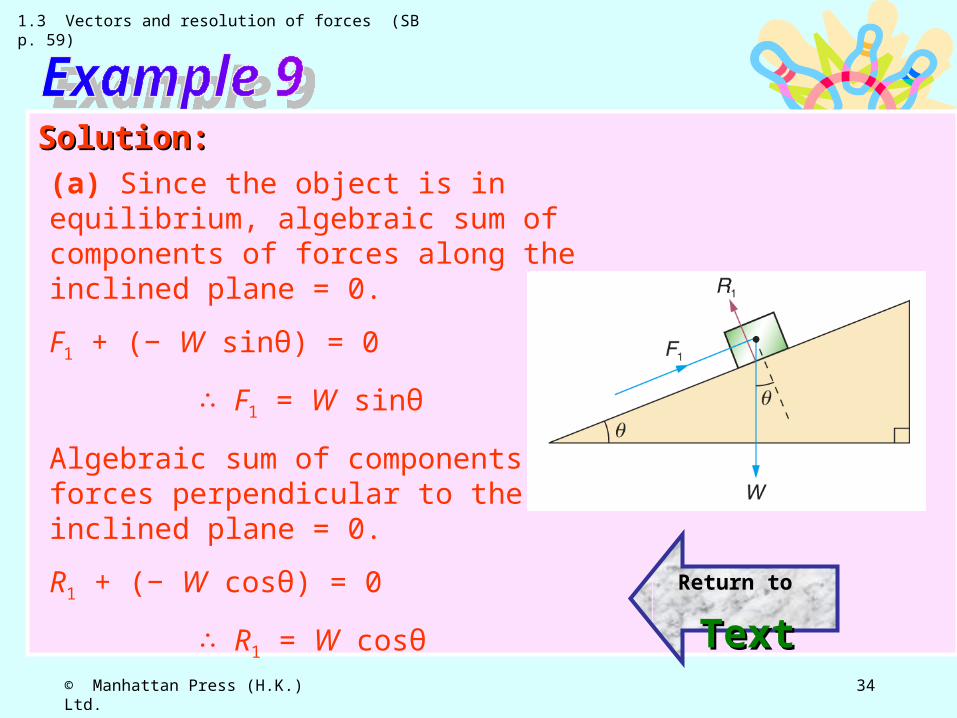
Q:Q: An object of weight W rests in
equilibrium on top of a smooth plane inclined at an angle θ to the horizontal as shown in Fig. (a).
(a) Find F1 and R1 in terms of W
and θ.(b) If the forces acted on the object are as shown in Fig. (b)
and the object is in
equilibrium, find F2 and R2
in terms of W and θ.
Solution
1.3 Vectors and resolution of forces (SB p. 59)
Fig. (a)
Fig. (b)
© Manhattan Press (H.K.) Ltd. 34
Solution:Solution:
(a) Since the object is in equilibrium, algebraic sum of components of forces along the inclined plane = 0.
F1 + (− W sinθ) = 0
∴ F1 = W sinθ
Algebraic sum of components of forces perpendicular to the inclined plane = 0.
R1 + (− W cosθ) = 0
∴ R1 = W cosθ
1.3 Vectors and resolution of forces (SB p. 59)
Return to
TextText

© Manhattan Press (H.K.) Ltd. 35
Solution (cont’d):Solution (cont’d):
(b) Since the object is in equilibrium, algebraic sum of components of forces along the inclined plane = 0.
F2 cosθ + (−W sinθ) = 0
∴ F2 = = W tanθ
Algebraic sum of components of forces perpendicular to the inclined plane = 0.
R2 + (−F2 sinθ) + (−W cosθ) = 0
∴ R2 = F2 sinθ + W cosθ
Substituting F2, = (W tanθ) sinθ + W cosθ
1.3 Vectors and resolution of forces (SB p. 60)
Return to
TextText
θθ
cossinW
θθθθ
coscoscossin 22 WWW
Related Documents











